的方法,以C8051F020单片机为例,设计其IAP应用系统,对系统的硬件原理,单片机软件流程,传输错误控制等内容进行了详细阐述,使系统实现稳定可靠的代码维护和升级。
2011-03-04 11:31:07
机器人制作和竞赛项目中,直接在项目应用和竞赛过程中学习单片机技术,提升单片机的学习效率,最后通过归纳总结,获得对整个单片机系统设计知识和技能。所有教学项目继续使用C 语言作为开发语言,这样可以在C 语言
2016-04-01 14:31:19
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理机器人的基本工作原理是示教
2021-09-13 08:40:55
ABB用的是DEVICENET,请问有什么单片机可以直接与ABB机器人通讯吗?也就是说有什么单片机可以用DEVICENET吗
2017-10-28 11:00:55
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色
2023-12-21 20:03:18
机器人的动作流程
三、草莓采摘机器人的控制系统设计
1、硬件部分介绍
草莓采摘机器人设计的硬件控制系统框图如图2.1所示,包括核心控制单元、传感器、驱动器等。核心控制单元包括单片机和树莓派,树莓派
2023-08-16 17:35:54
”电流 计算机打印机和绘图仪145°C时的热警告标志输出说明170°C时热关机(输出关闭)LMD18200是一座专为运动而设计的3A H桥内部钳位二极管控制应用。该设备使用-结合双极和带外部自举
2020-09-23 15:09:40
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
ROVER C5 V0501 机器人控制系统采用国际流行的开放式软硬件平台,配以自主研发的避障控制卡、牵引运动卡及机器人内控专用编码器和安全接口;
2019-09-12 09:00:12
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-07-05 07:08:47
协调完成多传感信息的融合,而运动执行层完成机器人行走。图1为智能导览机器人的总体结构框图。3 导览机器人硬件设计3.1 人工智能层硬件实现 考虑到移动机器人控制系统要求处理速度快、方便外围设备扩展
2019-07-04 08:30:00
研究的前沿,它在一定程度上代表了一个国家的高科技发展水平。运动控制系统是机器人控制技术的核心,也是机器人研究领域的关键技术之一,在机器人控制中具有举足轻重的地位,因此,各研究机构都把对机器人运动控制系统的研究作为首要任务。
2020-08-19 06:57:09
研究了一种用FPGA技术实现三轮全方位移动机器人运动控制系统的方法,与双DSP结构,DSP+CPLD结构,以及DSP+专用集成电路结构等相比,该方法具有简单可靠,扩展性强等特点。且FPGA设计简单,使用方便,开发周期短,能够实现真正的SOPC系统。
2019-10-22 07:35:19
接收管阵列和放大器组成。接收到的信号输入至单片机的PTB7端口,经过A/D转换后,送入处理器,以控制机器人的行为转换。电机控制模块 电机驱动电路采用基于双极性H-桥型脉宽调整方式PWM的集成电路L293D
2011-04-13 09:48:45
、电源单元、声光报警单元、键盘输进单元、电机控制单元和显示单元组成,如图2所示。 2.1 单片机单元 本系统采用at89c51单片机作为中心处理器。其主要任务是扫描键盘输进的信号启动机器人,在机器人
2015-02-09 16:12:59
,分别与单片机的TXD,RXD相连接,共地!这边采用的是line_flowing机器人巡线,相对于直线偏离角度识别个人感觉机器人巡线程序比较稳一点openmv`import sensor, image, time, math#调用声明from pyb import UART代码:import se
2022-01-24 07:26:07
如何实现单片机40舵机舞蹈机器人Proteus仿真设计?
2022-01-24 06:22:19
以及性价比最优,根据控制系统功能要求及步进电机应用环境,确定了设计系统硬件和软件的功能划分,从而实现了基于8051单片机的四相步进电机的开环控制系统。控制系统通过单片机存储器、I/O接口、中断、键...
2021-07-06 06:41:14
,导航技术,计算机技术,人工智能等多个领域,因而对移动机器人的控制部分提出很高的要求,特别是视觉传感器的出现,要求控制系统不仅存储量大,而且处理速度快等。以往基于PLC和单片机控制的移动机器人就不能很好
2020-11-23 15:08:52
树莓派和其他机器人的控制器有何不同?如何使用树莓派开发智能机器人控制系统?
2021-12-23 06:55:02
如何利用C51单片机实现循迹灭火机器人的设计?
2021-11-01 07:59:17
其设计是机器人研究的核心。该控制系统通常以MCU、 DSP等为核心,采用上、下位机二级分布式结构。其中上位机一般为PC机,下位机为单片机或DSP等微控制器。但随着移动机器人的智能化,控制方法的发展,所需
2019-07-30 07:02:31
规则机器人驱动系统为气动控制系统,将采用气源、电源拖线运行方式。气源压力5bar,电源电压24V。手机+蓝牙+单片机控制,实现转向、前进、后退、行走、循迹、运载功能。要求机器人能自动实现循迹(...
2022-01-13 08:09:39
移动机器人是一种能够感知外部环境,在有障碍物的环境中能够实现动态决策与规划,从而完成避障等多种功能的综合系统。机器人系统通常分为机构本体和控制系统两部分,控制系统的作用是根据用户的指令对机构本体进行
2020-03-06 07:07:07
随着人口老龄化进程的加快,更多老年人,尤其是地震和疾病致残的残疾人,都需要照顾。基于此,这里提出一种基于ARM的嵌入式服务机器人控制系统设计。该服务机器人的控制系统是机器人的神经中枢,因而其设计是机器人研究的核心。该控制系统通常以MCU、 DSP等为核心,采用上、下位机二级分布式结构。
2019-10-15 08:03:16
最近在看工业机器人的资料,想知道现在的一些市面上的工业机器人上用的控制控制系统都有哪些厂商呀?
2015-01-23 12:04:01
各方面的相互融合。控制系统则是整个舞蹈机器人的核心 , 其设计的好坏 ,将严重影响到整个舞蹈机器人的性能。二、实验内容舞蹈机器人的控制系统包 括硬件电路与软件设计两方面, 整个舞蹈机器人控制系统的设计与实现过程, 具 体控制要求如下: (1)本系统采用分时复用的方法 ,利用
2021-12-10 06:48:52
基于STM32F103单片机的智能扫地机器人是由哪些部分组成的?怎样去设计一种基于STM32F103单片机的智能扫地机器人?
2021-09-02 07:50:22
。机器人的电路板使用两个TB6612FNG BY TOSHIBA双电机驱动器进行修改,以控制一个电机而不是两个,因此我的机器人有两个单独的电机。此外,它使用STM32F103C8T6 MCU。您可以在图像和 PDF 文件中看到原理图的详细信息。
2022-12-07 07:49:08
工作原理及功能总体描述 系统以盛群单片机为主控制器,应用红外线定位遥控、超声测距、电机控制等核心技术,实现机器人携带球杆,自动定距跟随高尔夫球手的功能。其结构框图如图1所示。车体
2013-10-27 18:20:36
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-06-30 06:37:34
什么是激光SLAM?激光SLAM技术在机器人运动控制系统中的应用是什么?
2021-07-30 06:37:25
`刚刚毕业老板让做一个电机驱动方案,12v电机,设计时要求安装堵转电流5a来做,留有很大余量。第一个图是lmd18200驱动,3,5,4管脚能直接连单片机吗?不能的话有什么危害吗,需要怎么隔离?第二个图自己搭建一个h桥,大神帮帮看看有没有问题。`
2017-08-18 16:33:53
,我再实现一款像稚晖君所做的Qbot那样的小型且高度集成的巡线机器人。
概述
巡线解迷宫机器人是一款能够通过红外反射传感器实现自主巡线以及解迷宫等功能的小型三轮机器人,该机器人的硬件核心采用的是芯来
2025-10-20 10:39:51
请问机器人用的是Linux系统还是单片机呀?单片机里是什么系统啊?我想写机器人的程序。
2011-04-07 14:12:52
怎样去设计一种基于PID算法的巡线机器人?基于PID算法的巡线机器人有哪些优势?
2021-07-27 06:54:05
于机器人控制系统当中。那么今天,我们就通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现。 机器人控制系统 机器人控制系统相当于机器人的大脑,是决定机器人功能和性能的主要部分,它一般分为机器人
2023-02-24 17:05:21
高速巡线机器人卓大大!这个巡线小车好厉害的,还能飞檐走壁,智能车啥时候也这样?▲ 敏捷巡线机器人飞檐走壁回复:在网站 HBFS Robotics 给出了这种高速巡线机器人的相关技术指标,值得大家借鉴
2021-07-22 09:07:52
概述 C8051F单片机的特点 C8051F单片机外设 适合各种应用的单片机系列 C8051F单片机的调试和编程 基于C8051F单片机的解决方案
2008-07-19 10:19:30 248
248 单片机温度控制系统的设计及实现
介绍在单片机温度控制系统的软硬件设计中的一些主要技术关键环节,该系统主要以8051单片机为核心,由温度检测电路,模/数转换电路
2009-04-13 17:10:01509 位置控制、速度控制、工业机器人和各种数控设备都需要直流电机和步进电机,LMD18200 广泛应用于这类电机控制。本文简要介绍了 H 桥组件LMD18200 的基本原理和引脚功能,给出了
2009-04-25 15:46:58107 本文提出了一种以ARM9 为主控制器的新型的仿人机器人分布式控制系统。单片机和外部计数器组成关节控制器。主控制器和关节控制器之间采用USB 通信。从而实现了控制系统的小型
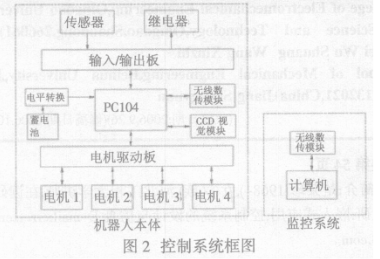
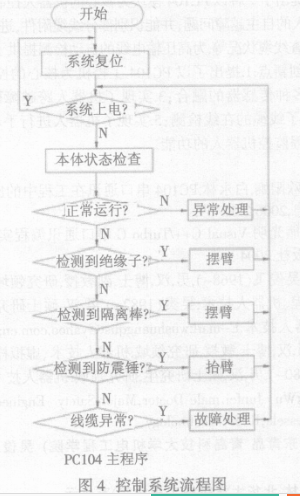
2009-05-25 15:57:4445 本文介绍了高压输电线巡线机器人控制系统,实现了高压输电线巡线机器人的越障、线路检测、实时监控等功能。实验结果表明该系统运行良好,具有良好的可靠性和实用价值。
2009-08-05 15:21:3532 介绍基于C8051F020 型单片机与CH375 型接口电路的OLED 控制系统的设计与实现方法,详细描述了CH375 型USB 总线通用接口电路的特点及工作原理,给出C8051F020 型单片机通过CH375 控制USB
2009-08-28 14:23:2840 以微型足球机器人小车子系统为研究对象,通过分析当前各支足球机器人队伍的小车系统控制器使用的CPU 的利弊。提出一种新的cPu 解决方案。基于CygnalC8051高速单片机依次给
2009-12-04 16:04:0897 本文介绍了一种机器人寻迹行走控制系统。系统采用了光电检测寻线和直流电机驱动相结合的机器人控制技术,应用AVR 单片机为核心控制器,来采集、存储、处理由光电检测寻迹系
2009-12-16 16:35:2618 智能移动机器人是当前机器人研究的一个重要领域,具有广阔的应用潜力。以C8051F340 单片机为核心,设计了一种基于超声测距的智能避障机器人,介绍了系统软硬件电路的设计与
2010-01-25 14:21:5681 采用C8051F020单片机的串口通信应用资料
2010-03-10 09:20:35120 110KV输电线路巡线机器人控制方法及实现:首先对巡线机器人的控制系统进行了简单介绍,然后重点阐述了一种新型的基于分布式专家系统的高压架空输电线路自动巡线机器人的控
2010-03-18 15:59:3627 C8051F单片机
C8051F系列单片机 单片机自20世纪70年代末诞生至今,经历了单片微型计算机SCM、微控制器MCU及片上系统SoC三大阶段,前两个阶段分别以MCS-51和80C51
2010-04-06 13:53:0163 本文介绍了高压输电线巡线机器人控制系统,实现了高压输电线巡线机器人的越障、线路检测、实时监控等功能。实验结果表明该系统运行良好,具有良好的可靠性和实用价值
2010-06-23 15:20:4134 C8051F单片机串口IAP原理
2010-07-13 15:49:1075 摘要:基于C8051F310单片机设计超小型无人飞行器舵机控制系统是一种成本低廉、实现容易的方法。文中介绍了舵机控制系统的实现原理并给出了该系统具体的软硬件设计,系统在飞
2010-07-16 11:49:01338 摘 要 介绍一种基于单片机的动态送风控制系统。该控制系统以C8051F330单片机为处理器,配合控制电路,采用脉宽调制技术,根据自然风特性,对直流电机的转速进行控制,从而实现风机
2010-07-21 22:41:4646 作者Email: yqs1799@tom.com [摘要] LMD18200是美国国家半导体公司(NS)推出的专用于直流电动机驱动的H桥组件。同一芯片上集成有CMOS控
2006-03-24 12:48:06 8167
8167 
混合信号系统级单片机C8051F020资料
C8051F020/1/2/3 器件是完全集
2008-10-08 12:56:453190 
C8051F005单片机的比例电磁铁控制技术
自动控制系统中,由微处理器控制的比例电磁铁作为执行器的应用越来越广泛。本设计是一个由C8051F005单片机
2009-03-29 15:14:272360 
单片机自动巡线轮式机器人控制系统设计
轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能控制于一体。在各种移动
2010-02-25 10:55:551254 
采用单片机C8051F060的智能功率柜的原理及设计
概述:简要介绍了智能励磁功率柜的概念及C8051F060单片机的特点,详细论述了基于C8051F060的智能
2010-03-06 17:13:571640 
单片机的自动巡线轮式机器人控制系统设计方案
1 引言
轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能
2010-03-17 10:40:061106 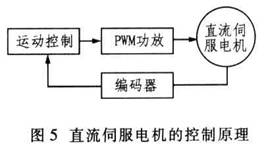
本文设计了一种基于摩托罗拉MC68HC08系列单片机的机器人追跑控制系统,用于研究机器人之间的简单互动。 移动机器人行为描述 在此系统中
2010-08-09 09:26:271741 概述 C8051F单片机的特点 C8051F单片机外设 适合各种应用的单片机系列 C8051F单片机的高度和编程 基于C8051F单片机的解决方案
2011-02-24 16:44:07306 摘 要:基于机器人复杂的决策控制和步态管理,采用了个人数字助理(PDA)和数字信号处理器(DSP)组合,并以Windows Mobile作为软件平台。具体分析了控制系统的硬件设计和软件设计方法。真实环境中的实验及比赛结果证明,该控制系统可以实现机器人的复杂控制。 关键
2011-03-01 00:40:0460 以C8051F020单片机为核心,可以设计一套智能气动泵控制系统,实现对气动泵进行状态检测和控制。
2011-03-15 10:39:332149 
利用51系列单片微型计算机实现洗浴服务 机器人 控制系统的设计。以单片机芯片AT89C51作为核心控制器,通过硬件电路设计及软件程序编制,设计洗浴服务机器人完成洗浴过程的控制系
2011-06-08 15:42:06112 作为新型的SOC片上型混合信号单片机, C8051F 系列产品已经被广泛应用到了智能控制仪表,嵌入式设备,消费电子等领域。提出了一种利用C8051F单片机内部可在线编程的FLASH存储器来设计
2011-06-13 15:38:21122 Cygnal C8051F 系列单片机采用CIP51内核,Cygnal指令与MCS51指令系统全兼容可用标准的ASM51Keil C高级语言开发编译C8051F系列单片机的程序
2011-06-14 15:09:21193 以C8051F020单片机为核心,设计一套智能气动泵控制系统,实现对气动泵进行状态检测和控制。
2011-06-23 17:32:181923 
介绍了一种利用高速单片机 C8051F021 组成的电阻炉温度控制系统,阐述了系统的工作原理、硬件电路设计及实践。系统利用铂电阻作为传感器的电桥采样温度,使用PID 算法进行闭环控制,输
2011-08-15 16:16:11177 该文结合仓储信息管理系统的需求.设计并开发了一种巡线机器人控制系统。采用TMS320F2812型DSP。利用反射式红外传感器感知与地面颜色有较大差别的导引线,采用直流电机PWM驱动。结
2011-09-30 15:09:2348 为实现基于单片机的步进电机式模拟器仪表系统,采用C8051F340单片机为控制器,单片机输出的时序方波作为步进电机驱动芯片的控制信号,步进电机带动指针显示汽车行驶过程中的实时
2011-10-24 11:57:15190 本系统采用双H桥结构驱动两个电机,并以AVR单片机Atmega168为处理器实现电机控制。通过单片机定时器的快速PWM(脉宽调制)模式输出不同占空比的PWM信号,送给H桥,从而控制电机的转
2012-01-13 15:34:1170 为了提高果园施药的作业效率和农药使用率,介绍了一种参数可调的施药机构及其控制系统。本系统基于SILICON公司C8051F020和C8051F340单片机作为微处理器,采用主从通讯方式,通过实验室
2012-06-04 15:39:5723 本文给出了一种基于C8051F020单片机实现密闭环境温度自动控制的系统方案。将半导体制冷模块置于一个密闭环境,通过C8051F020单片机实现对半导体制冷片的制冷、制热和不同功率运行的
2012-07-26 16:05:153778 
巡线机器人稳定成像控制系统设计_王利华
2017-01-16 14:04:302 针对假肢自动化测试不可重复性和可能对测试病人造成的不安全问题,本文设计了一种基于两自由度髋关节运动和MSP430单片机的机器人假肢控制系统。设计的机器人可在矢状面平面重复两个自由度臀部运动,将跑步机
2017-11-10 10:21:359 机器人单片机控制系统的设计与实现进行探究,小仅可以推动我国科学技术的发展,而且还为之后的学习与工作打下良好基础。 所谓智能机器人,是利用甲.片机、计算机、传感器等多种技术研发的机器人。与传统的机器人相比,智能
2018-01-27 12:21:525 组态控制四部分组成。电机供电部分采用带有隔离功能的反激式AC/DC变换电路,为电机及系统提供稳定的电源。电机驱动电路采用H桥结构,通过接收控制系统给出的控制指令,实现上下电机的正反转、加减速和速度匹配控制。单片机控
2018-01-30 15:01:393 系统采用单片机(STC89C54RD)作为主要控制器件,采用HEDS9701槽型光耦加360线光栅片组成的编码器获取帆板的角度信息,由单片机实时采集编码器的正交信号,从而获得实际角度。根据实际角度
2018-04-02 19:39:003077 
方向。因此。有必要研制一套完整的轮式机器人系统。并进行相应的运动规划和控制算法研究。笔者设计和开发了基于5l型单片机的自动巡线轮式机器人控制系统。
2019-08-04 10:09:494986 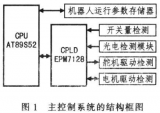
机器人的控制系统,就相当于人体的大脑,是机器人的核心组成部分。关于机器人的控制系统有哪些分类呢?机器人控制系统按其控制方式可分集中控制系统、主从控制系统及分散控制系统,下面为大家详细讲讲这些系统。
2019-11-04 08:45:3328264 介绍了一种以高速单片机C8051F021为核心的高精度恒温箱温度控制系统,阐述了系统的工作原理、硬件设计及软件设计。系统利用基于恒流源的桥式测温电路采样温度值,使用增量式PID算法进行闭环控制,输出
2019-12-13 17:28:1611 控制系统。LMD18200广泛应用于打印机、机器人和各种自动化控制领域。本文介绍了LMD18200芯片的结构、原理及其典型应用。
2019-12-31 10:44:0767 就巡线机器人的运动控制系统中的保护及定位系统而言,其本质是根据传感器信号给出相应的电机控制信号。也就是说,电机保护及定位系统完成控制输入(传感器信号)到控制输出(电机控制信号)间的映射。电机保护及定位系统的特点决定了其非常适合于采用有限状态机进行设计。
2020-04-25 17:51:001722 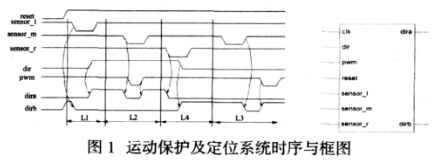
方向。因此.有必要研制一套完整的轮式机器人系统。并进行相应的运动规划和控制算法研究。笔者设计和开发了基于5l型单片机的自动巡线轮式机器人控制系统。
2020-07-18 11:35:424463 
随着当今科技的不断发展,机器人应用领域的不断扩展,人们对机器人的控制越来越想方便、快捷。基于PC 的机器人控制系统极大的促进了机器人的遥操作技术。基于VC++.NET的机器人控制平台的设计,提高了系统的人机交互性和可扩展性。
2021-04-07 10:52:445050 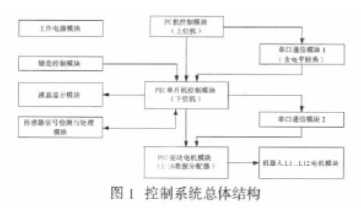
控制系统。LMD18200广泛应用于打印机、机器人和各种自动化控制领域。本文介绍了LMD18200芯片的结构、原理及其典型应用。
2021-04-14 14:19:2427 基于单片机C语言的巡线小车设计论文免费下载。
2021-05-28 10:58:4760 基于双串口单片机的上肢康复机器人交互控制系统
2021-06-29 14:47:1913 电子发烧友网站提供《Arduino巡线机器人.zip》资料免费下载
2023-02-09 09:46:160 电子发烧友网站提供《高压输电线路巡线机器人智能控制系统.pdf》资料免费下载
2023-10-30 09:37:304 基于单片机设计的一款智能冰箱控制系统,可以控制冰箱的制冷装置,可以采集冰箱的异味浓度,超过闽值之后控制紫外灯进行消毒工作单片机采用单片机采用单片机采用STM32F103C8T6。通过继电器控制冰箱的制冷装置,通过MQ-2采集冰箱的异味浓度。
2024-06-25 09:21:492981 
巡线机器人,作为一种先进的智能巡检设备,近年来在多个领域得到了广泛应用。它以移动机器人为载体,搭载多种检测仪器,通过机器视觉、电磁场、GPS、GIS等多场信息融合技术,实现自主移动、自主巡检与数据
2024-07-04 17:02:115336 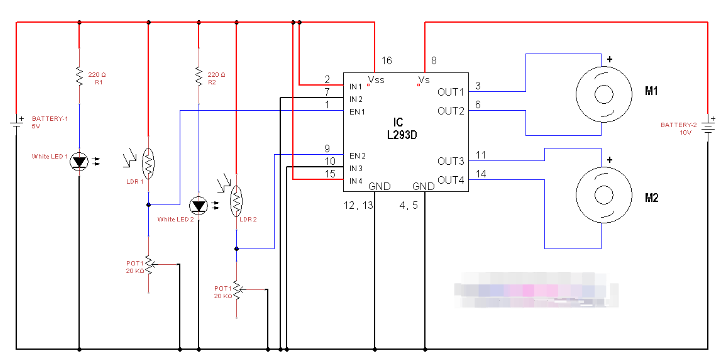
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论