机器人需要有一个控制系统,用硬件和软件组成一个的控制系统。
2018-07-30 08:53:21 36102
36102 在研究机器视觉的移动机器人导航技术的基础上,基于层次结构,简单介绍导览机器人控制系统的总体方案及软硬件设计。采用图像处理中的边缘检测和模板匹配方式进行机器人的视觉导航,使机器人在结构化道路环境下能够自动躲避障碍物,停靠到目标点,并能向参访者导览解说,最后验证了该系统的有效性和优越性。
2018-12-07 08:08:007850 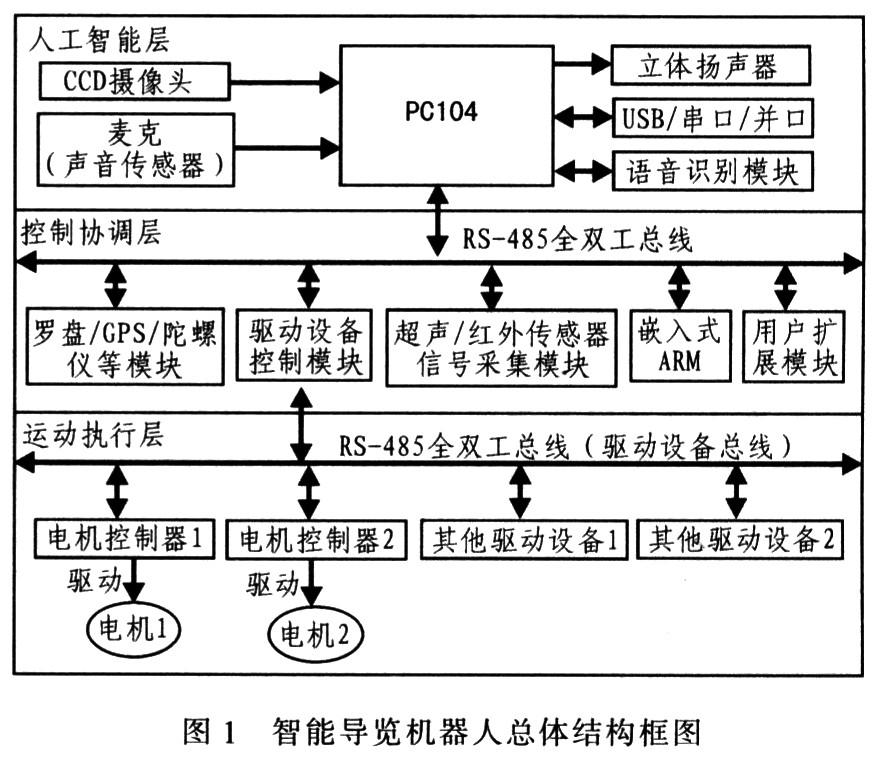
描述XC9572和XC95108 DIY CPLD实验板的PCB该板需要外部 JTAG 电缆来对器件进行编程。JTAG 电缆可以是传统计算机并行端口或现代 USB JTAG 编程器。一条并行端口
2022-08-05 07:09:52
机器人运动控制技术,尽管运动控制器需求增长迅速,但即便到明年,整体市场规模仍不到 10 亿元。高性能工业机器人作为核心装备,一直被国外品牌垄断,而运动控制器的自主可控一直是国产机器人领域的一大痛点
2021-07-28 07:33:29
机器人的运动原理还是属于最基本的简单机械。机器人运动主要是依靠什么装置?有些什么装置是机器人用的比较多的?
2015-02-03 11:22:01
若说当下的热门科技,机器人绝对算一个。机器人作为典型的机电一体化技术密集型产品,它是如何实现运作的呢? 机器人的控制分为机械本体控制和伺服机构控制两大类,伺服控制系统则是实现机器人机械本体控制
2021-09-17 08:22:50
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理机器人的基本工作原理是示教
2021-09-13 08:40:55
芯片TMS320L F2407A 控制器的接口电路,介绍了该芯片在多关节机器人控制系统中的使用。解码器内部具有16 位硬件计数器,与CPU 接口方便,非常适合于多轴闭环运动控制系统的开发。[hide]/replyview]
2009-12-17 16:12:31
文中提出的TMS320DM6437+TMS320F28015的软硬件设计方案在新型球形机器人控制系统中得到初步应用,验证了理论设计的可行性和可靠性,实验结果表明接口数据读写高效可靠。本设计对以后其他双核控制系统接口的设计与研究工作具有很好的参考价值。
2021-05-27 06:46:44
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色
2023-12-21 20:03:18
自动或半自动机器人常常需要嵌入式控制系统,从而能够结合高度智能化的确定性控制,并且可以方便地连接到不同的传感器和执行器上。NI提供了多种嵌入式硬件平台,以满足复杂系统的需求。从尖端的机器人研究项目直至高级行业应用,NI平台被证实是高效的机器人解决方案。
2019-11-06 07:50:49
和开发指南分别上线GitHub和智元机器人官网,“一站式”开源软硬件全套图纸和代码,大幅降低了机器人技术开发的门槛,推动了全球机器人技术的普及与创新,让“人形机器人人人造”理想照进现实。
官方介绍,在
2024-10-25 15:20:31
,对工业机器人的运动学、动力学、基本控制系统等传统内容的介绍比较简洁,对机器视觉、机器听觉和移动机器人的自主定位等新技术介绍较多,并以可重现的若干实例对相应技术和方法进行了验证,相关程序代码附在书中,重点
2016-06-01 13:12:46
机器人运动控制系统,给公司选择一款非常合适做运动控制的板卡、提供一种新的解决方案。 ①根据米尔MYD-Y6ULX开发板提供的资料,搭建开发环境 ②移植CANopen协议、数据存储、建立软件框架 ③实现
2018-01-22 10:32:40
申请理由:有扎实的基础,做过《群空调远程控制系统》、《计算机联锁仿真系统软硬件实现》、《具有通讯协作能力的智能灭火机器人群》等项目,现在在深圳捷顺科技做测试工程师项目描述:本项目在轨道创新实验室两项
2015-08-11 22:13:51
制作者的角度细致、浅显地讲述了自制机器人的制作过程。全书以制作一个巡线机器人为主线展开,包括工具的使用、元器件的选购、控制电路的制作、机器人壳体的制作、运行调试等内容。网友评价:下载链接:目录:推荐课程
2017-06-07 17:04:18
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
ROVER C5 V0501 机器人控制系统采用国际流行的开放式软硬件平台,配以自主研发的避障控制卡、牵引运动卡及机器人内控专用编码器和安全接口;
2019-09-12 09:00:12
工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。工业
2015-01-19 10:58:38
的实践经验,来系统的梳理一下什么是移动机器人软硬件系统问题。文中涉及到的开源项目网站地址如下:开源项目网站Handsfree
2021-08-06 06:13:07
《先进机器人控制》从控制的角度系统地介绍了机器人学的基础知识和当前的发展状况。全书共分为12章,由基础篇、控制结构篇和先进控制篇构成。基础篇着重介绍串联关节机器人的运动学、运动规划和动力学。其中
2017-09-19 15:30:57
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-07-05 07:08:47
求大神分享一款不错的基于CPLD的臭氧电源控制系统的软硬件设计
2021-04-29 06:45:15
本文以6- PPPS并联机器人为控制对象,以NI公司的系列软硬件产品为基础,依托国家自然基金(No. 30770538)的支持,快速开发了此并联机器人的开放式数字控制系统。
2021-05-12 06:38:22
请问各位大哥谁有基于XC9572实现HDB3编解码的完整电路及VHDL程序,发一份给我,在此先谢谢了。邮箱251093703@qq.com
2013-05-30 15:00:30
协调完成多传感信息的融合,而运动执行层完成机器人行走。图1为智能导览机器人的总体结构框图。3 导览机器人硬件设计3.1 人工智能层硬件实现 考虑到移动机器人控制系统要求处理速度快、方便外围设备扩展
2019-07-04 08:30:00
研究的前沿,它在一定程度上代表了一个国家的高科技发展水平。运动控制系统是机器人控制技术的核心,也是机器人研究领域的关键技术之一,在机器人控制中具有举足轻重的地位,因此,各研究机构都把对机器人运动控制系统的研究作为首要任务。
2020-08-19 06:57:09
泛使用的工业标准技术。此外,我们希望找到一个灵活的嵌入式设计平台,提供软硬件工具之间的紧密集成性。系统还需要能够集成各类I/O和传感器,并且在竞赛环境的操作中足够耐用。参照机器人的复杂特性和较短的开发时间,以上
2019-05-15 09:40:01
、处理传感器的数据,以便在控制系统的信号综合中使用; (4)实现机器人步态规划、运动方程的求解以及控制指令的快速传输;(5)具有良好的控制结构和接口,便于高层控制软件的开发;(6)有一定的预留接口
2019-07-26 08:25:28
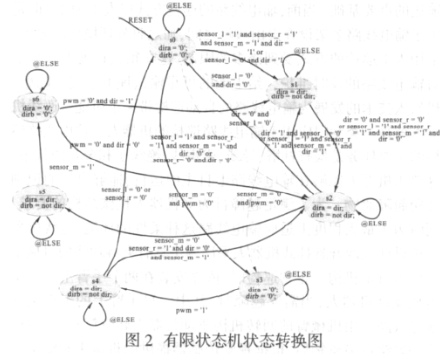
研究了一种用FPGA技术实现三轮全方位移动机器人运动控制系统的方法,与双DSP结构,DSP+CPLD结构,以及DSP+专用集成电路结构等相比,该方法具有简单可靠,扩展性强等特点。且FPGA设计简单,使用方便,开发周期短,能够实现真正的SOPC系统。
2019-10-22 07:35:19
本文概述了上海交通大学机器人研究所研制的新型遥控移动式排爆机器人PBJ-1的嵌入式控制系统固件的情况。利用嵌入式系统技术开发适合排爆等各类遥控地面移动机器人使用的嵌入式控制系统能够解决上述种种矛盾。
2021-06-07 06:11:02
版,危险信号报警器,归纳起来为两大类,只能给安装和信息显示装置。(6)控制系统控制系统的任务是根据机器人的作业指令程序以及从床啊勃起的反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能,列如工业
2016-03-06 12:56:19
树莓派和其他机器人的控制器有何不同?如何使用树莓派开发智能机器人控制系统?
2021-12-23 06:55:02
移动机器人是一种能够感知外部环境,在有障碍物的环境中能够实现动态决策与规划,从而完成避障等多种功能的综合系统。机器人系统通常分为机构本体和控制系统两部分,控制系统的作用是根据用户的指令对机构本体进行
2020-03-06 07:07:07
随着人口老龄化进程的加快,更多老年人,尤其是地震和疾病致残的残疾人,都需要照顾。基于此,这里提出一种基于ARM的嵌入式服务机器人控制系统设计。该服务机器人的控制系统是机器人的神经中枢,因而其设计是机器人研究的核心。该控制系统通常以MCU、 DSP等为核心,采用上、下位机二级分布式结构。
2019-10-15 08:03:16
工业机器人的控制系统的主要任务是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等项目,主要功能有示教再现功能和运动控制功能。示教再现控制的主要内容主要包括示教及记忆方式和示教
2017-10-20 10:03:57
最近在看工业机器人的资料,想知道现在的一些市面上的工业机器人上用的控制控制系统都有哪些厂商呀?
2015-01-23 12:04:01
模块化的控制系统体系结构:采用分布式CPU计算机结构,分为机器人控制器(RC),运动控制器(MC),光电隔离I/O控制板、传感器处理板和编程示教盒等。机器人控制器(RC)和编程示教盒通过串口/CAN总线
2018-11-23 10:40:38
怎么实现对机甲大师机器人的控制?
2021-11-19 06:33:45
如何去验证电机的运动性能?怎样去设计一种基于STM32F407ZGT6芯片控制板机器人的运动控制系统?
2021-06-29 08:34:12
闭环控制系统设计及软硬件实现</strong><br/></font></p>&
2009-12-18 11:02:54
自动蔽障,自动清扫的功能。清洁机器人是实现智能清扫的主题部分,我们将要做到的是:完成机械结构的设计与制作、硬件电路的设计及实现、底层软件的编写以及系统调试、智能手机蓝牙通讯技术的研究及实现、清洁机器人
2013-11-08 22:30:10
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-06-30 06:37:34
什么是激光SLAM?激光SLAM技术在机器人运动控制系统中的应用是什么?
2021-07-30 06:37:25
移动机器人运动控制系统设计及控制算法研究
2012-08-20 15:54:16
巡线解迷宫机器人是我基于国产处理器来开发嵌入式应用的首次尝试,通过一个月左右的理论学习与动手实践,我学会了如何在项目正式开始前做需求分析,如何根据机器人所要实现的功能来做软硬件方案的选型,如何在遇到
2025-10-20 10:39:51
什么是移动机器人软硬件系统问题?移动机器人软硬件系统有哪些问题呢?
2021-11-11 06:07:42
怎样去设计一种基于PID算法的巡线机器人?基于PID算法的巡线机器人有哪些优势?
2021-07-27 06:54:05
于机器人控制系统当中。那么今天,我们就通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现。 机器人控制系统 机器人控制系统相当于机器人的大脑,是决定机器人功能和性能的主要部分,它一般分为机器人
2023-02-24 17:05:21
ISP多媒体接口,适合构建机器人视觉-运动融合系统,实现工件识别与动态定位。
3. 支持闭环控制与误差校正
可结合高分辨率编码器反馈数据,运行机器人闭环控制算法;
利用AI 协处理器实现机器人误差
2025-11-14 15:48:29
高速巡线机器人卓大大!这个巡线小车好厉害的,还能飞檐走壁,智能车啥时候也这样?▲ 敏捷巡线机器人飞檐走壁回复:在网站 HBFS Robotics 给出了这种高速巡线机器人的相关技术指标,值得大家借鉴
2021-07-22 09:07:52
The XC9572 is a high-performance CPLD providingadvanced in-system programming and test capabilities
2009-03-28 15:20:12 85
85 介绍了一种基于DSP 的逆变电源控制系统,详细阐述了系统组成结构和软硬件设计。该系统采用TMS320F2812 作为主控制器,最大程度的减少了硬件电路的搭建,实现了对逆变电源的数
2009-07-30 10:23:5837 本文介绍了高压输电线巡线机器人控制系统,实现了高压输电线巡线机器人的越障、线路检测、实时监控等功能。实验结果表明该系统运行良好,具有良好的可靠性和实用价值。
2009-08-05 15:21:3532 110KV输电线路巡线机器人控制方法及实现:首先对巡线机器人的控制系统进行了简单介绍,然后重点阐述了一种新型的基于分布式专家系统的高压架空输电线路自动巡线机器人的控
2010-03-18 15:59:3627 本文介绍了高压输电线巡线机器人控制系统,实现了高压输电线巡线机器人的越障、线路检测、实时监控等功能。实验结果表明该系统运行良好,具有良好的可靠性和实用价值
2010-06-23 15:20:4134 用XC9572实现HDB3编解码设计
介绍了HDB3编解码的原理和方法,给出了用CPLD(Complex Programmable Logic Device)实现E1信号HDB3编解码的方法,同时给出了它的实现原
2009-03-28 15:15:101939 
xc9572应用
介绍了HDB3编解码的原理和方法,给出了用CPLD(Complex Programmable Logic Device)实现E1信号HDB3编解码的方法,同时给出了它的实现原理图,最后给出
2009-03-28 15:22:176246 
单片机自动巡线轮式机器人控制系统设计
轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能控制于一体。在各种移动
2010-02-25 10:55:551254 
单片机的自动巡线轮式机器人控制系统设计方案
1 引言
轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能
2010-03-17 10:40:061106 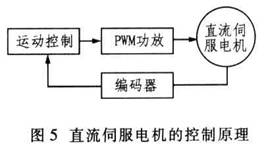
摘 要:基于机器人复杂的决策控制和步态管理,采用了个人数字助理(PDA)和数字信号处理器(DSP)组合,并以Windows Mobile作为软件平台。具体分析了控制系统的硬件设计和软件设计方法。真实环境中的实验及比赛结果证明,该控制系统可以实现机器人的复杂控制。 关键
2011-03-01 00:40:0460 对微型足球机器人低层控制系统进行了研究,给出了一种以87C196KC为核心辅以LM629运动控制器构成的双闭环微型足球机器人低层控制系统.由于采用了集成运动控制芯片,不仅简化了系统软硬
2011-03-24 12:14:1557 该文结合仓储信息管理系统的需求.设计并开发了一种巡线机器人控制系统。采用TMS320F2812型DSP。利用反射式红外传感器感知与地面颜色有较大差别的导引线,采用直流电机PWM驱动。结
2011-09-30 15:09:2348 为满足幕墙擦洗机器人平台对控制系统实时性和并发性的要求,以C/OS-II实时操作系统(RTOS)为平台,针对本机器人的特定应用开发了其软硬件系统。介绍了擦洗机器人的功能结构特征
2011-10-11 15:05:5041 针对目前架空输电线路巡线机器人连续巡线能力低、对大型障碍物越障适应能力弱的问题,提出基于仿生学原理的巡线机器人越障模型。设计两吊臂式巡线机器人,建立机器人的动力学
2013-06-08 17:52:5849 工业机器人运动控制系统的设计与实现_施文龙
2017-01-13 21:40:361 巡线机器人稳定成像控制系统设计_王利华
2017-01-16 14:04:302 管道检测机器人控制系统设计与运动研究_蔡辉
2017-03-19 11:30:431 架空输电线路巡线机器人越障过程运动学仿真分析_曹雷
2017-03-16 08:46:111 我们今天的文章:机器人控制技术详解: 机器人控制系统的特点 机器人的结构采用空间开链接结构,其各个关节的运动是独立的,为了实现末端点的运动轨迹,需要多关节的运动协调。所以,其控制系统要比普通的控制系统复杂得多
2017-09-19 18:29:2811 焊枪的工业机器人。工业机器人的运动控制系统涉及数学、自动控制理论等,内容很多。要在较短的篇幅中,全面而系统地介绍工业机器人的运动控制系统,实在是非工业机器人控制专业人员所能及的事情,因此,本章内容是从焊接机
2017-10-17 11:07:248 介绍了混联机构的搬运码垛机器人控制系统的设计与实现方法,根据工作现场的实际需求,对离线码垛过程进行了研究,通过码垛关键参数的输入和码垛空间判断,建立离线编程的基础,给出硬件控制系统采用工业PC
2017-10-17 16:59:2713 针对六轴工业机器人的高精度、高实时性的系统要求,设计并实现了基于RTX 的工业机器人系统。介绍六轴工业机器人本体结构,重点分析基于RTX 的控制系统架构,给出六轴工业机器人的软硬件结构设计,充分利用
2017-10-18 09:17:5910 本文介绍了基于运动控制卡的机器人智能切割系统的软硬件设计。该机器人具有四个自由度,采用三轴联动的工作方式,第三轴可与选定的两轴的运动轨迹保持正切。实验表明该机器人切割系统工作稳定,满足玻璃切割等行业
2017-11-08 18:19:436 本文首先介绍了伺服运动控制系统主要特点,其次介绍了伺服运动控制系统工作原理,最后从机器人移动方式的选择与结构设计、移动机器人运动控制系统及机器人的控制系统设计三个方面来详细介绍机器人伺服运动控制系统设计,具体的跟随小编一起来了解一下。
2018-06-01 14:19:3617071 方向。因此。有必要研制一套完整的轮式机器人系统。并进行相应的运动规划和控制算法研究。笔者设计和开发了基于5l型单片机的自动巡线轮式机器人控制系统。
2019-08-04 10:09:494986 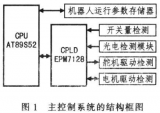
机器人的控制系统,就相当于人体的大脑,是机器人的核心组成部分。关于机器人的控制系统有哪些分类呢?机器人控制系统按其控制方式可分集中控制系统、主从控制系统及分散控制系统,下面为大家详细讲讲这些系统。
2019-11-04 08:45:3328264 基于STFT的微创手术机器人运动控制系统
2021-06-16 10:58:2118 电子发烧友网站提供《XC9572和XC95108 DIY CPLD实验板的PCB.zip》资料免费下载
2022-07-22 11:33:056 电子发烧友网站提供《Arduino巡线机器人.zip》资料免费下载
2023-02-09 09:46:160 电子发烧友网站提供《高压输电线路巡线机器人智能控制系统.pdf》资料免费下载
2023-10-30 09:37:304 巡线机器人,作为一种先进的智能巡检设备,近年来在多个领域得到了广泛应用。它以移动机器人为载体,搭载多种检测仪器,通过机器视觉、电磁场、GPS、GIS等多场信息融合技术,实现自主移动、自主巡检与数据
2024-07-04 17:02:115336 
摘要 :随着机器人技术的飞速发展,对运动控制系统的性能要求日益严苛。本文聚焦于基于先进MCU(微控制单元)的机器人运动控制系统设计,深入剖析其理论基础、实践方法与前沿技术。以国科安芯的MCU芯片
2025-04-27 10:58:41764
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论