当前,机器人产业的崛起,已经在全国各地掀起新的产业革命。很多人说:机器人是站在风口上的猪,尤其在长三角、珠三角的风口之上,它更是极具市场潜力。凭借得天独厚的地理优势,这块黄金地吸引了一大批优秀的机器人企业在这里扎根,而李群自动化正是其中之一。
2017-01-19 15:03:48 3335
3335 2016上海国际工业自动化及机器人展览会时间:2016年4月26日-28日地点:上海世博展览馆1、2号馆2016第三届深圳国际工业自动化及机器人展览会时间:2016年10月12日-14日地点:深圳
2016-01-08 14:03:05
2016第19届上海国际工业自动化及机器人展览会 The 19th Shanghai International Industrial Automation & Robotics
2016-01-29 14:28:12
公司)展览简介慕尼黑机器人及自动化技术贸易博览会(AUTOMATICA)是一个国际性的贸易展会,将世界各地的机器人自动化领域的人们聚集在一起。从2004年开始展会每两年在慕尼黑举办一次,本年度为第7届
2015-10-15 16:32:07
2016第三届深圳国际工业自动化及机器人展览会3rd Shenzhen International Industrial Automation&Robot Exhibition 2016时间
2016-01-08 14:03:44
生活的需求与渴望。从机械化、电气化、自动化一路走来,人类社会已迈入信息化并正走向智能化时代。以工业机器人为代表的自动化技术日趋成熟,并已面向千企万厂进行推广应用,但由于缺乏智能,通常只能替代5%以下
2016-10-10 16:30:56
`2017深圳国际工业自动化及机器人展览会 Shenzhen International Industrial Automation&Robot Exhibition 2017时间
2017-06-14 17:55:07
2018深圳国际工业自动化及机器人展览会The Shenzhen International Industrial Automation&Robot Exhibition 2018时间
2017-11-30 17:37:54
2020年上海国际智能工厂暨工业自动化机器人展China (Shanghai) International Smart Factory Exhibition, 2020时间:2020年2月25-2月
2019-08-31 09:53:00
2020第十届深圳国际工业自动化及机器人展览会时间:2020年09月02日-04日地点:深圳会展中心(福华三路) 关于展会欢迎参加由深圳自动化学会、香港贸发展览集团联手匠心打造的“2020第十届深圳
2019-10-12 16:39:24
`2020第十届深圳国际工业自动化及机器人展览会时间:2020年09月02-04日地点:深圳会展中心关于展会欢迎参加由深圳自动化学会、香港贸发展览集团联手匠心打造的“2020第十届深圳国际工业自动化
2019-10-28 17:24:48
由深圳自动化学会、上海贸发展览服务有限公司联合主办的“2022 第 12 届深圳国际工业自动化及机器人展览会”,简称:“ARE Shenzhen 2022”,将于 2022 年 08 月 23-25
2021-11-16 11:39:58
。综合考虑, 使用机器人自动化线更加经济、适用。机械手自动化线适于大间距的压力机生产线, 同时适用于已有生产线的自动化改造。通过更换端拾器, 机器人自动化生产线可适合多车型的生产, 柔性更高。转自:【速加网】--让零件加工像网购一样简单!
2018-11-26 11:59:28
及多语言支持;面向多行业,支持行业模板的开发与封装;快速上线仅需要2~6周完成非侵入式机器人配置在当前系统和应用程序外,无需改变当前任何应用和技术7X24小时全天候待命能够全天候执行此前人力从事的工作
2018-09-23 11:34:37
的集中视觉足球机器人底层控制系统,简化了系统设计, 满足微型机器人的控制需要。同时, 也有利于足球机器人自主化的转型和发展。
2009-03-28 14:03:25
,该软件还包含能够轻松在实时嵌入式硬件上实现的机器人IP,用于避障、动力学和搜寻算法,帮助自主系统或机器人选择最佳路径。 “在过去23年里,LabVIEW开发环境的发展非常显著。LabVIEW从最初
2019-05-21 07:40:08
自动或半自动机器人常常需要嵌入式控制系统,从而能够结合高度智能化的确定性控制,并且可以方便地连接到不同的传感器和执行器上。NI提供了多种嵌入式硬件平台,以满足复杂系统的需求。从尖端的机器人研究项目直至高级行业应用,NI平台被证实是高效的机器人解决方案。
2019-11-06 07:50:49
得干净,要尽量覆盖从A到B点的所有区域,实现扫地机器人“扫地”的这个功能。 所以,机器人自主定位导航技术的发展还需要越来越多的技术加以支撑,适用于更多的场景。虽然技术和需求在变,但不变的是,在行业中取长补短,结合不同新的技术进行融合,这是不会改变的事实。
2018-08-24 16:56:24
ZN-MPS03型柔性自动化生产线及工业机器人应用实训系统是什么?ZN-MPS03型柔性自动化生产线及工业机器人应用实训系统有哪些技术参数?
2021-09-27 07:12:32
什么是ZNRX-J2型工业机器人柔性自动化生产线实训系统?ZNRX-J2型工业机器人柔性自动化生产线实训系统有哪些技术参数?ZNRX-J2型工业机器人柔性自动化生产线实训系统有哪些功能?
2021-08-10 07:56:56
中取得了令人瞩目的效果。
阅读感悟
从传统的手动编程到借助大模型实现智能化、自主化,从单一模态的交互到多模态信息的深度融合,再到扩散模型的应用,机器人控制技术正在以惊人的速度进化。这不仅让机器人在工业
2024-12-29 23:04:07
ZNH-DQ01工业机器人自动化综合实训平台一、概述ZNH-DQ01工业机器人自动化综合实训平台主要用于工业机器人电气系统、气动系统的设计、安装、调试、维护维修;工业机器人PLC编程;工业机器人变频
2021-07-01 06:48:14
清洁机器人是服务机器人的一种,所谓服务机器人是指自主或半自主的、从事非生产活动、能完成有益于人类健康的服务工作的机器人。家庭清洁机器人集机械、电子、传感器、计算机、控制、机器入技术、人工智能等诸多
2019-09-05 06:56:37
力泰科技资讯:搬运机器人作为智能制造的代表,有着巨大的发展空间。虽然智能制造还未普及,但是很多自动化设备已经悄悄的进入了工厂的车间了。很多人对搬运机器人认识还不够多,其实并没有想象中的那么复杂,通俗
2018-08-20 11:21:01
、曲线等运动轨迹的生成为多点插补方式,操作及编程方式为引导示教编程方式或坐标定位方式。在机器人产业中,常见到的机器人种类包括Deltarobot,以及工业产在线的机器手臂。若着眼的是工业自动化市场,则
2020-07-29 06:57:04
了人类。但是让我们从娱乐转向正题,看看人类如何从与工厂自动化中涉及的不同类型的机器人的交互中受益,并且在与他们合作时仍然感到安全。毕竟,根据国际机器人联合会的说法,到2018年,大约有130万个工业机器人
2022-11-14 08:06:44
按键操作)的自动化, 可以实现完全的自动化测试。 如下图所示,界面测试蚂蚁机器人自动控制相机拍摄设备界面图片,自动识别图片上的数字和文字,在小蚂蚁测试平台执行测试协同控制执行,配合其他蚂蚁机器人,就可以实现对整个设备进行自动化测试,对屏幕进行全面自动检查。www.antestin.com
2020-03-06 19:57:07
苏州卡思特自动化设备有限公司 本公司主要从事视觉系统 寻求设备商合作视觉结合机器人项目联系方式:***欢迎打扰!
2016-08-12 16:03:12
也已变为“灵活应用机器人技术的、具有实在动作功能的智能化系统”。近十几年来,FPGA行业也在飞速的发展,它在实际科研开发中的地位也从处理简单逻辑上升到了数字系统的核心处理器件。SOPC(可编程片上系统
2019-08-20 07:21:01
随着机器人性能的提升和价格的下降,以“自动化设备+工业机器人操作”取代传统的“自动化设备+人工操作”的生产模式将成为PCB行业转型发展的趋势。
2019-10-10 06:54:02
ZNT-MK01工业机器人模块化教学工作站是什么?ZNT-MK01工业机器人模块化教学工作站有哪些技术性能?
2021-09-28 07:35:14
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。
2020-03-27 09:03:30
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
2025-07-26 11:22:07
2016深圳国际工业自动化及机器人展览会Shenzhen International Industrial Automation&Robot Exhibition 2016时间:2016年
2016-05-25 09:01:48
效率; (3)进步产品质量; (4)削减生产过程的原材料、能源损耗。 众所周知,工业机器人是大量自动化生产线主要重成部分。随着我国制作在人力成本及工业转型等重压之下加速自动化晋级步伐
2015-12-09 13:59:29
”不断加深技艺,从已经曝光的智造工艺来看,在精度、集成度、自动化率、环保效能等方面都有极大的提升。 PART 1人类工匠的基本素质 工匠精神起源于人类的匠人,被机器人借去。在匠人的路上,手中的锤子也许
2022-10-18 14:34:33
工厂自动化结构
PLC系统应用
IO-Link系统解决方案
工厂自动化中的工业机器人
问答环节
2023-09-07 06:32:35
误区供大家参考。误区1:引入机器人就是进行自动化升级改造?无疑,机器人的应用是自动化升级改造最具代表性的一个方面。机器人的引入,能够大大解决人力成本攀升、提高生产效率和产品质量及稳定性。机器人作为
2018-12-14 10:15:05
自动化车间是未来工业发展的趋势,而采用机器人生产则是这种自动化的集中体现。
2019-09-30 07:34:12
招聘自动化、电气自动化、自动化控制工程师,挂证,不坐班,要求持有相关专业的中级职称证,用于我司资质申报工作上,凑资质人员申报资质,不存在风险。联系电话***,Q1580479594李经理
2015-10-24 18:06:31
` 随着科技的发展,很多行业开始向自动化技术转变。以前很多加工制造的工作都是由大量的人手来完成,现在则用机械手、机器人等一些自动化设备来代替。 作为近几十年发展起来的一种高科技自动化生产设备,工业
2012-09-21 09:33:00
`力泰科技资讯:在现代化生产线中,越来越讲究的是柔性化生产。机械设备自动化是这个世纪制造业发展的大趋势,机器人产业将是一个阳光产业,未来的世纪是机器人技术极度发展的世纪,人类将从单调繁杂的体力劳动中
2020-11-30 09:44:15
焊接机器人加装激光焊缝跟踪传感器是焊接自动化的发展趋势近年来随着现代制造业的蓬勃发展,焊接技术的应用愈发广泛。传统的焊接工作是人工完成的,虽然操作方便,灵活多变,但对经验的依赖非常大,重复精度不高
2020-03-16 14:57:05
焊接机器人是焊接自动化的革命性进步,它突破了焊接刚性自动化传统方式,开拓了一种柔性自动化新方式。刚性的焊接自动化设备,由于它一般都是专用的,只适用于中、大批量产品的自动化生产,因而在中、小批量产品焊接生产中,手工焊仍是主要焊接方式。
2020-03-20 09:01:36
焊缝跟踪:自动化机器人实时焊缝跟踪寻位自动化机器人焊接过程中会出现工件夹偏、钣金件热变形、机器人焊接后再进行人工补焊等情况频繁发生,非但没有节省人工成本而且增长了产品返修率。自动化机器人专用激光焊缝
2019-04-19 10:48:41
立足于上海,放眼于未来——2018上海国际工业自动化及机器人展览会展会小鲍 2017-07-05 19:052018上海国际工业自动化及机器人展览会ARE Shanghai 2018关于展会欢迎参加
2017-07-06 18:11:07
自己开发的机器人图形化编程软件从2005年起就开始搞机器人教学了,至今每年夏天都举行机器人夏令营。10年来一直尝试做一款简单稳定好用的机器人编程软件,上次做的类似于app inventor 的积木
2016-07-02 20:15:27
视觉足球机器人底层控制系统,简化了系统设计, 满足微型机器人的控制需要。同时, 也有利于足球机器人自主化的转型和发展。[hide][/hide]
2009-05-25 15:35:22
天津星云律动科技有限公司智能机器视觉自动化设备-尺寸分拣仪-星律自动化非标定制设备
2023-01-13 15:43:56
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C
2023-04-17 15:40:56
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C
2023-04-17 15:49:48
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。
2023-04-17 16:36:37
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。-
2023-04-19 09:22:29
大大提高了工作效率,也极大地提升了实验精度。自动移液机器人是一种能够代替人工进行精确液体操作的自动化设备。它通过精密的机械结构和先进的控制系统,实现了对微小液体体积的准
2023-12-06 11:21:24
机器人激光焊接机:高精度自动化焊接的未来1. 概述机器人激光焊接机是一种集成了工业机器人和激光焊接技术的先进自动化设备,通过高能量密度的激光束实现快速、精准的焊接。该系统结合了机器人的灵活运动
2025-03-28 14:04:12
GTS国产自主化激光跟踪仪是高精度、便携式的空间大尺寸坐标测量机,是同时具高精度(μm级)、大工作空间(百米级)的高性能光电测量仪器,被广泛应用在飞机、汽车、船舶、航天、机器人、核电、轨道交通装备
2025-04-27 17:03:45
中图仪器CEM3000自主化SEM扫描电镜采用钨灯丝电子枪,其电子枪发射电流大、稳定性好,以及对真空度要求不高,使得钨灯丝台式扫描电镜能够在较短的时间内达到稳定的工作状态并获得清晰的图像,从而
2025-05-07 10:44:54
该设备应用在公共充电场, 汽车产线, 测试设备等需要使用机器人自动取出充电枪, 插入充电车辆, 取出充电枪放回充电桩, 全程自动化,不需要人工干预. 可以对应多种充电枪型号. 在重点充电场企业和车企
2025-07-07 08:47:04
控制方案实现高效自动化作业。机器人机械臂末端可定制末端夹具,车身可定制物料缓存架。技术优势经世智能复合机器人产品使用了自主研发的复合机器人一体化控制系统和复合机器人
2025-08-13 10:06:22
产品简介经世智能档案存取复合机器人,在智慧档案库房行业主要应用于档案自动存取与转运、涉密档案管理等环节,通过“AGV移动底盘+协作机械臂+视觉系统”一体化控制方案实现高效自动化作业。机器人机械臂末端
2025-08-13 13:36:24
五金配件机器人打磨自动化系统折页.compressed
2016-12-25 22:25:00 0
0 如何让机器像人一样工作,解放像机器一样工作的人?这就是阿丘科技的使命。人能够借助眼睛配合手进行试错和调配,我们希望把这种能力赋予机器,借助计算机视觉和机器人技术解决工业自动化的需求,打开工业自动化以及智能机器人的新格局。
2018-07-10 16:43:4711726 没错,工业机器人、PLC和自动化三者的关系就是:工业机器人就是一个执行命令的设备;PLC则能协调控制这些设备;而自动化则就是有多个这样的设备和PLC组成。
2018-08-15 15:22:3718679 客户希望在最新型的生产线上,机器人为其折弯设备加料及卸料,并且要求机器人要能够毫无问题的集成到已有的生产设备中,最终在金属板材加工折弯中心上用机器人替代人工,实现生产线上下料自动化。
2018-11-23 14:53:376478 优傲机器人见证了十年来协作机器人的创举,协作机器人从概念化产品已成为工业自动化产业中增长最快的领域。优傲UR持续快速的增长,其协作机器人不断帮助各行各业减低自动化进程中的障碍。
2018-12-07 13:53:241305 自动化车间是未来工业发展的趋势,而采用机器人生产则是这种自动化的集中体现。在本文中,Geseke 的Druckguss Westfalen 公司就通过使用徕斯机器人的自动化系统,使其达到了节能的效果。
2019-02-14 15:51:261510 中国将推广以此为特征的自动化战略,并因此重塑世界机器人市场。
2019-03-28 11:08:591405 近日,亚马逊收购了科罗拉多州波得市自动化仓储机器人创企Canvas Technology。
2019-04-11 17:28:01828 对中小型企业和大型制造商来说,只要安装正确,机器人自动化能够帮助他们提高效率和工作质量,降低运作成本并提升灵活度。
2019-06-25 15:32:122483 对中小型企业和大型制造商来说,只要安装正确,机器人自动化能够帮助他们提高效率和工作质量,降低运作成本并提升灵活度。
2019-07-01 15:25:351487 6月29日,李群自动化首次推出了2019年自主研发的—款倒装式SCARA机器人PG6 ,再一次掀起了倒装SCARA的风潮。
2019-07-05 11:00:444270 机器人自动化,对于很多企业仍然是不太熟悉的板块,因此迟迟无法下手!
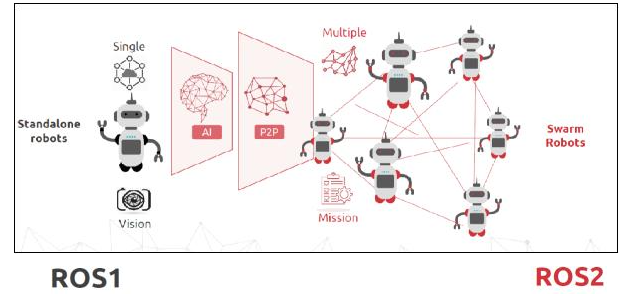
2019-07-05 15:37:212923 人工智慧开启了新一代机器人技术 Robotics 2.0,最大改变是从原先人工编写程式而来的自动化,迈向了真正的自主学习。本文将尝试揭开人工智慧(AI)应用的神秘面纱,协助读者瞭解 AI 机器人将如何影响我们的未来,并釐清我们常常听到,但却着墨不多、甚至根本尚未全然理解的主题。
2019-12-13 13:37:242118 机器人操作与基础编程是机器人自动化系统集成项目的基础核心,所有的集成最终都是集合到机器人运动实现。
2020-01-24 17:48:005658 智能技术对自动化产生了深远的影响。通过利用物联网,人工智能和机器学习等技术,机器人技术和自动化已发生了巨大的发展。当涉及到AGV时,这些技术可以制造出更快,更智能的移动工具。有些人将这些更智能的机器人归为一类:自动驾驶汽车(SDV),而其他人则将其视为下一代AGV。
2020-03-08 16:41:001092 机器人过程自动化(RPA)机器人过程自动化(RPA)解决方案是一种软件机器人,可自动执行人类经常执行的许多任务。
2020-04-16 12:02:272743 机器人过程自动化(RPA)解决方案是一种软件机器人,可自动执行人类经常执行的许多任务。
2020-04-19 09:33:101782 机器人正在撼动现代商业世界的各个方面。德勤第三次年度机器人调查显示,组织中对机器人流程自动化(RPA)的实施正在上升。
2020-08-13 16:23:593032 对中小型企业和大型制造商来说,只要安装正确,机器人自动化能够帮助他们提高效率和工作质量,降低运作成本并提升灵活度。在部署自动化之前,企业必须制定完整的战略性计划。他们需要了解自动化的运作以及在何种
2020-11-13 12:58:101039 第二部电影中还拯救了人类。但是让我们从娱乐转向正题,看看人类如何从与工厂自动化中涉及的不同类型的机器人的交互中受益,并且在与他们合作时仍然感到安全。毕竟,根据国际机器人联合会的说法,到2018年,大约有
2021-12-20 15:20:071568 
本期我们将同Veo机器人公司的联合创始人兼首席技术官——克拉拉·乌 (Clara Vu) 一起,讨论工业自动化以及人类与协作机器人的未来发展:
2021-12-29 17:25:341956 生产过程,几乎不需要或几乎没有操作员的输入就可以以高度自动化的方式进行生产。有许多技术可以使生产过程实现自动化,而机器人技术正变得越来越重要。虽然没有“机器人”的确切定义,但该术语通常是指可以编程以执行各种不同任务并与环境进行某种程度的交互作用的物理机器。
2022-07-08 17:36:484189 工业机器人大体上分类为线性机器人(又叫直角坐标机器人)、多自由度机器人(又叫多关节机器人)、并联机器人(又叫deltaΔ机器人)和水平多关节机器人(又叫scara机器人)。由各种类型的关节机械手臂和自动化传输设备结合而成的自动化岛。不同功能的自动化岛链接而成自动化线,不同的自动化线结合组成自动化车间。
2022-11-01 14:34:213350 电子发烧友网站提供《用于家庭自动化的机器人灯开关.zip》资料免费下载
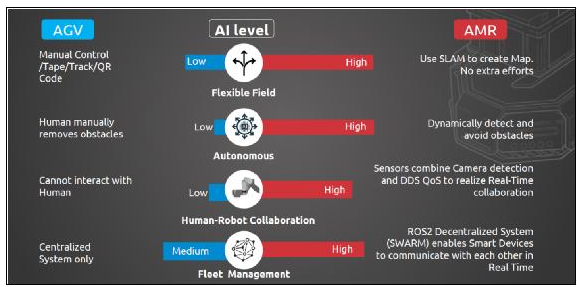
2022-11-14 11:13:210 相较于自动导引车辆(AGV),SMR系列作为创新型自主移动机器人(AMR),旨在通过设备的自主性,有效地提高效率,助力制造流程将系统从简单的自动化升级为自主化。
2023-05-04 15:08:45867 
以深度融合了工业级力控技术、机器视觉和先进AI的自适应机器人为基础,非夕从机器人所需的底层能力出发,探索解决打磨自动化难点、满足多样打磨需求的通用“武器”。
2023-06-08 15:41:481035 
很多客户对于焊接机器人自动化焊接工艺存在误解,认为现实情况下很难实现从人工焊接(焊工)到焊接机器人自动化焊接的跨越。但实际上,焊接机器人可以通过简单的操作步骤完成。通常焊接客户对自身产品的焊接工
2021-12-09 18:14:282297 
使用机器人来使制造过程自动化有无数好处,但是,请务必记住,每种解决方案都存在网络安全风险,从协作式机器人编程到传感器收集的数据,存在很多需要保护的信息。
2023-07-12 11:03:37542 在过去的几十年里,软件开发一直是一项需要大量人力和时间的任务。程序员们不仅需要编写代码,还需要调试、优化和维护软件。然而,随着技术的不断进步和人工智能的发展,自动化编程机器人正逐渐引领着软件开发领域
2023-08-14 11:39:171195 编程一直以来都是一项需要深入学习和不断提升的技能。然而,随着自动化机器人的出现,编程正在变得越来越简单。利用自动化机器人的力量,我们能够快速生成代码,提高开发效率,让编程变得更加容易和高效。 首先
2023-08-18 13:36:051257 编程一直以来都是一项需要深入学习和不断提升的技能。然而,随着自动化机器人的出现,编程正在变得越来越简单。利用自动化机器人的力量,我们能够快速生成代码,提高开发效率,让编程变得更加容易和高效。首先
2023-08-21 08:08:411214 
在过去,编程通常是专业程序员的天地,需要大量的时间、技能和经验。然而,随着自动化编程机器人的崛起,编码正在逐渐变得更加民主化。这些机器人通过简化编程过程、提供易于使用的工具和增强开发者的能力,为更多
2023-09-04 14:23:07900 从自动化到自主化、协调化,更加智能化的生产用机器人
2023-10-16 17:50:361267 
晶泰科技与ABB机器人联合打造柔性自动化、智能化的未来实验室,让自动化设备成为科研人的手中利器,成为突破各科研领域效率瓶颈的日常工具。
2024-01-19 16:49:291884 在当今高度自动化的制造业环境中,机器人技术已经成为不可或缺的一部分。其中,机器人自动化焊接工作站以其高效、精确和稳定的特性,正逐渐改变传统焊接工艺的面貌。
2024-01-29 13:24:592434 随着科技的不断进步和工业领域的快速发展,自动化已成为现代工业生产的重要趋势。在这一进程中,工业机器人和PLC(可编程逻辑控制器)作为自动化的两大核心要素,发挥着至关重要的作用。本文将深入探讨工业机器人、PLC与自动化之间的关系,旨在为读者提供一份全面且深入的解析。
2024-06-17 11:10:343080 机器人的卓越表现提供了坚实的支撑。高精度频率:工业自动化机器人的每一个动作都需要精确到毫米甚至微米级别,这对时钟信号的精度提出了极高的要求。爱普生SG-8101C
2024-11-04 10:58:31738 
本文是第二届电力电子科普征文大赛的获奖作品,来自西南交通大学黄雯珂的投稿。3机器人与自动化的未来展望随着机器人和自动化技术的不断进步,未来的世界将会是一个高度自动化的世界。智能工厂、智慧家庭
2025-04-26 08:33:59684 
在工业自动化和智能医疗快速发展的今天,富唯智能凭借先进的复合机器人力控技术,推出了新一代复合机器人解决方案。该方案深度融合协作机器人、自主移动机器人(AMR)及高精度视觉引导技术,在多类复杂场景下实现超柔性、高精准的作业能力,显著提升流程自动化水平。
2025-08-26 16:54:26623
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论