市面上 5 款激光雷达,来看看到底谁才能代表自动驾驶的未来?iDAR(AEye)iDAR(Intelligent Detection and Ranging)是 AEye 公司的产品,它是一种新型
2018-07-26 20:45:02
发生。这些程序校准磁力计、双天线安装对准误差、IMU安装对准误差,还校准车辆振动水平以便进行静态期检测。该系统可在两种硬件配置中工作。第一种配置包括两个FOG(检测航向和俯仰角)、一个MEMS陀螺仪
2018-10-18 10:55:34
原理的激光雷达来说影响更加严重。因为需要能够区分出环境光和激光信号,就需要有更优异的处理算法和光学调校。 传统受限于原理,三角测距法的激光雷达都会给大家一种完全无法抗击环境光照的印象,更不提在室外可以工作
2018-02-02 14:06:27
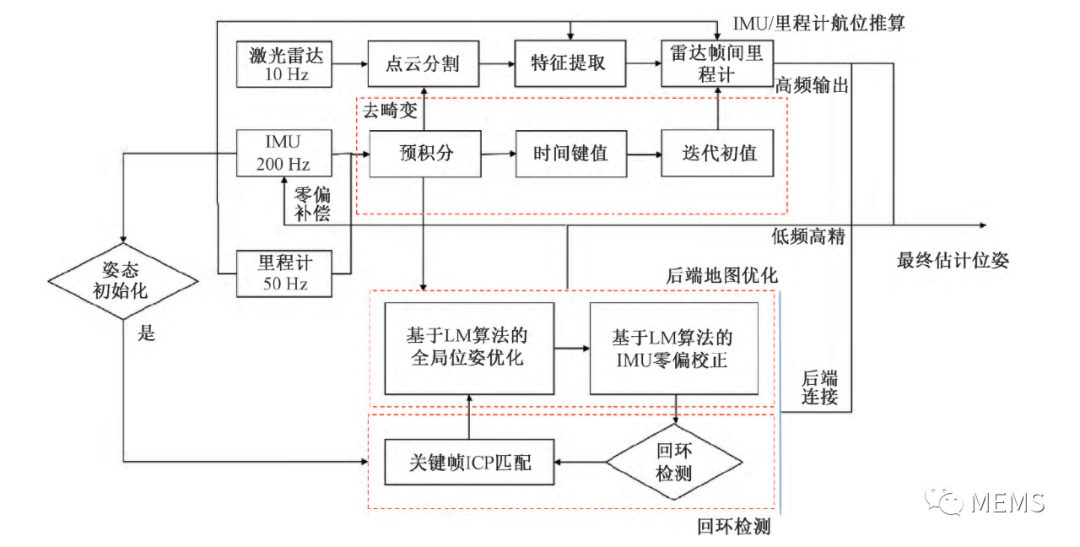
的多元组合态势。车载激光雷达应用算法可分为三类:点云分割算法、目标跟踪与识别算法、即时定位与地图构建算法(simultaneous localization and mapping,SLAM)。
各类
2023-09-19 13:35:01
主要内容本文提出了一种不依赖于棋盘格等辅助标定物体,实现像素级相机和激光雷达自动标定的方法。方法直接从点云中提取3D边特征,一避免遮挡问题,并且使用了精确度更高的深度连续边。文中首先指出:以下四种
2021-09-01 07:42:19
【作者】:向礼;刘雨;苏宝库;【来源】:《控制理论与应用》2010年02期【摘要】:为改善传统粒子滤波中的样本退化和样本枯竭问题,提出一种新的粒子滤波算法.在重要性采样中,利用最新测量值,结合差分
2010-04-24 09:04:09
第一章导航定位技术分类 1. 定位技术分类1.1 基于相对测量的定位(航位推算)1.2 基于绝对测量的定位1.3 组合定位1. 定位技术分类 1.1 基于相对测量的定位(航位推算) (1)轮式里程计
2021-09-01 07:15:25
`我们已经对单线激光雷达司空见惯,其旋转线扫的测量方式导致造成寿命问题和价格居高不下。 因此,北醒研发了CE30,它是一款具有大视场角的固态激光雷达。它可同时输出132°水平视场、9度垂直视场范围内
2018-01-11 09:21:13
想了解行业国内做固态激光雷达的厂家,激光雷达里面是怎么样的啊
2021-01-17 15:29:39
、速度等特征量的雷达系统,正是这样的一个系统,成为了无人驾驶汽车的灵魂所在。激光雷达成名于2012年谷歌无人驾驶汽车的横空出世,当时头顶“大铁桶”的谷歌无人驾驶汽车在全世界范围内引起轰动,“大铁桶”也
2017-10-20 15:49:06
激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显:1、具有极高的分辨率:激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,激光雷达具有极高的距离
2017-09-19 15:51:15
最为重要的,目前,主流的用于周围环境感测的传感器有激光雷达、毫米波雷达、视觉传感器三种。1.自适应巡航控制系统 Adaptive Cruise Control(ACC)自适应巡航控制系统是一种智能化
2017-10-18 17:18:24
`科技的进步日新月异,要数在汽车圈子里最火热的词汇,自动驾驶辅助系统一定是位居榜单前列的,而自动驾驶中核心的硬件之一—激光雷达,也是屡屡被各家车企送上热搜榜单,成为了业界内关注的重心。激光雷达被
2021-03-18 11:14:17
在量产的也是这种机械式的激光雷达。混合固态也是机械式旋转类的激光雷达。另外一种是 MEMS。基于 MEMS 的扫描式雷达目前属于在研状态,它的原理是通过 MEMS 扫描镜来改变光路。还有一种是相控阵
2017-09-08 17:24:48
点击上方“AI算法修炼营”,选择“星标”公众号精选作品,第一时间送达这篇文章是激光雷达点云数据分割算法的嵌入式平台上的部署实现。主要的创新点有两点:一是利用多路分支采用不同分辨率输入后再...
2021-12-21 08:28:22
激光信号,就需要有更优异的处理算法和光学调校。 传统受限于原理,三角测距法的激光雷达都会给大家一种完全无法抗击环境光照的印象,更不提在室外可以工作的可能性了。 不过,对于RPLIDAR而言并不是如此
2018-02-07 13:40:27
Detection and Ranging,即「激光的探测和测距」。这是在 2004 年提出的定义,更符合激光雷达的概念。 激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显: 1
2020-07-14 07:56:45
比对上一帧和下一帧环境的变化可以较为容易的探测出周围的车辆和行人。2.SLAM加强定位。激光雷达另一大特性是同步建图(SLAM),实时得到的全局地图,通过与高精度地图中特征物的比对,可以实现导航及加强
2017-10-16 16:31:32
激光雷达距离像背景抑制算法研究相干激光成像雷达距离像处理的一个重要内容就是进行背景抑制。利用原始强度像的均值信息进行距离像的背景抑制因为强度像受到噪声影响而效果不佳,改进算法加入了强度像的噪声滤除
2009-08-08 09:40:21
简单的3D雷达,获取三维数据呢?目前市面上主流的有2种方式:1、采用线状激光器,将原先的一个点变成一条线型光;2、使用一个2D激光雷达扫描,同时在另一个轴进行旋转,从而扫描出3D信息;图片来源于网络
2018-05-11 15:33:44
的。Scanse的一款价值250美元的名为“sweep”的二维激光雷达扫描器可在户外使用,并专为移动、低功耗应用而设计。它只用了竞争对手近四分之一的成本,这将给这类传感器带来全新的应用(我们在很多其他类型
2017-09-26 14:30:16
4个开关量输入信号组合选取15组区域组(FieldSet)中的任一个作为当前工作区域组,适应复杂多变的应用环境,还可以输出点云数据。 ■镭神激光雷达+SLAM算法可实现的五大功能 激光雷达为主
2018-11-09 15:59:01
有道友能介绍介绍EAI激光雷达吗?
2020-12-31 17:48:20
FMCW激光雷达与dTOF激光雷达的区别在哪?
2021-07-23 13:22:37
污染气体的手段,已成为激光雷达研究中的最重要的课题,因为它关系到我国社会能否持续发展的重大问题。激光雷达是一种主动式的现代光学遥感设备,其基本工作原理与普通雷达类似:由发射系统发送一个信号与目标物质
2016-05-23 14:44:42
TOF 方案激光雷达是激光雷达新一代技术方案,本产品解决了如市场三角测试法等产品组装问题难,价格成本高等问题,目前提供面阵及单光子技术,基于COM产品。集成了SPAD,TDC,DSP,RAM
2019-06-07 00:03:35
STM32 Cube MX学习笔记——TOF 高速单线激光雷达 L10_串口中断通信1. TOF 高速单线激光雷达 L102. STM32 Cube MX配置代码配置1. TOF 高速单线激光雷达
2022-03-02 07:19:03
度较慢,而且测量精度对啁啾时调制时的线性度程度非常敏感。虽然设计一种功能完善的激光雷达系统具有挑战性,但这些挑战都不是不可克服的。随着研究的继续,我们越来越接近于大多数汽车生产结束后就能够完全自动化的时代。
2018-09-10 14:10:45
反射光,采用相应的算法对多次发射光进行处理,就是多次回波技术。 多次回波技术,在很多激光雷达中都有应用。最常见的处理方法就是采用最后一次回波,如果在雨雾、灰尘环境中,激光可以穿透雨雾、灰尘,并最终打到
2020-09-24 14:17:56
系统的信号精度降低甚至丢失卫星信号时,不借助里程计信息,SKM-4DU利用纯惯性导航技术,也可在较长时间内单独对汽车载体进行高精度定位、测速和测姿。未来,SKYLAB将继续致力于高性能、高精度定位模块
2017-10-12 18:13:02
激光雷达在一定范围之内会纠正里程计的误差,但在某些特殊环境下(如雷达扫描的有效点较少时),里程计的准备度还是会影响定位的效果。 因此,对于需要自主定位导航的服务机器人而言,电机里程计的精准度,往往是决定
2018-03-28 15:48:15
谁能帮帮小弟我! 十分感谢! 要求:用c语言编写一个自行车速度计和里程计! 基于芯片AT89C51,用霍尔元件测速度!用lcd1602显示最好!不要求报警!能有一个开关暂停显示!小弟的qq1252295329!!求大神高手指点一个
2013-04-16 20:01:46
``一年一度的国际消费类电子产品展览会(CES)已经完满收官,短短的几天时间里,我们见识了Intel无人飞机灯光秀、百度无人车、移动行李箱等众多“黑科技”。而北醒不仅展示了性能卓越的固态激光雷达,在
2018-01-25 09:38:47
`一年一度的国际消费类电子产品展览会(CES)已经完满收官,短短的几天时间里,我们见识了Intel无人飞机灯光秀、百度无人车、移动行李箱等众多“黑科技”。而北醒不仅展示了性能卓越的固态激光雷达,在
2018-01-26 09:19:09
``一年一度的国际消费类电子产品展览会(CES)已经完满收官,短短的几天时间里,我们见识了Intel无人飞机灯光秀、百度无人车、移动行李箱等众多“黑科技”。而北醒不仅展示了性能卓越的固态激光雷达,在
2018-01-25 09:36:04
达22m的量程和更为稳定的测距性能。 北醒结合创新的生产工艺和软、硬件多项优化,使得激光雷达真正达到了消费级,可应用到更广泛的领域。 远、准、稳 最远测距可达22m, 高频率的实时测量,具有
2018-01-04 10:21:23
围绕激光雷达点云算法模块,向合作伙伴提供包括激光雷达传感器硬件和算法一体的整体解决方案,与各领域企业共同作战。三个季度以来,我们逐步向普罗米修斯计划内部合作伙伴以 SDK 的方式开放
2017-12-15 14:20:48
`我们已经对单线激光雷达司空见惯,其旋转线扫的测量方式导致造成寿命问题和价格居高不下。 因此,北醒研发了CE30,它是一款具有大视场角的固态激光雷达。它可同时输出132°水平视场、9度垂直视场范围内
2018-01-04 10:18:39
``一年一度的国际消费类电子产品展览会(CES)已经完满收官,短短的几天时间里,我们见识了Intel无人飞机灯光秀、百度无人车、移动行李箱等众多“黑科技”。而北醒不仅展示了性能卓越的固态激光雷达,在
2018-01-25 09:41:33
来检测物体。激光雷达系统的视场 (FOV) 决定了激光雷达能够捕捉到的图像的宽度,因此该视场对于自动驾驶决策算法十分重要。扩大FOV的方法有很多种,其中之一就是利用机械扫描,使用电机帮助实现360度
2022-11-03 07:12:38
里程计工作原理是什么?汽车里程计的受扰现象有哪些?
2021-05-19 07:26:30
视觉惯性里程计 综述 VIO Visual Inertial Odometry msckf ROVIO ssf msf okvis ORB-VINS VINS-Mono gtsam目录里程计
2021-07-27 07:21:50
1、概述由于课题要求,需要设计一款适合于果园应用的激光雷达。因此采用单线扫描激光雷达和角度传感器来设计能采集二维数据的激光雷达。关于数据的转化的理论,我们可以查阅相关文献。在此,只讲基本的构造和程序
2021-11-12 08:15:02
单线激光雷达特点:结构简单、扫描速度快、分辨率高、可靠性高、成本低。单线激光雷达实际上就是一个高同频激光脉冲扫描仪,加上一个一维旋转扫描。单线激光雷达虽然原理简单但是可以有效、高频的测试物体的距离
2017-09-25 11:30:10
,实现自主避障和导航。在这款盲人拐杖里,斯坦福的学生团队加入了以下传感器,用来协助盲人拐杖的运行:激光雷达:帮助盲人探测周围物体的形状和环境GPS:在室外的时候可以知道具体的位置IMU:知道盲人走路
2021-11-12 14:12:43
`TFmini是北醒在推进激光雷达低成本化进程中里程碑式的一步。 产品配以独特的光学、结构和电子设计,使得产品具有低成本、小体积和低功耗三大优点。 产品内置室内外各应用环境的适配算法,可保证产品在
2018-01-04 10:22:39
`TFmini是北醒在推进激光雷达低成本化进程中里程碑式的一步。 产品配以独特的光学、结构和电子设计,使得产品具有低成本、小体积和低功耗三大优点。 产品内置室内外各应用环境的适配算法,可保证产品在
2018-01-11 09:22:38
SKM-4DX卫星+惯性导航模块基于卡尔曼滤波算法融合两种导航算法,对卫星导航的定位精度进行智能识别,如果卫星导航精度较好,则进行组合导航;一旦发现卫星导航信号非常差甚至丢失信号,则进行纯惯性导航
2020-08-13 01:29:45
集成正交安装的高精度MEMS陀螺仪和正交安装的高精度MEMS加速度计,内置全温零位误差补偿、安装正交误差补偿、非线性误差补偿和g值敏感误差补偿等多种校准算法,采用双排14针插针通过UART TTL通讯
2024-01-18 13:46:16
一.机器人导航算法工程师岗位职责:1. 负责机器人视觉或激光雷达的SLAM算法的研发和优化;2. 负责机器人自主导航定位算法的研发,主要包括基于深度相机或激光雷达、IMU、里程计等多传感器信息融合
2020-06-08 05:06:44
5:ouster激光雷达OS-1-64激光雷达在安防监控领域有其独特的魅力与优势,但仅仅依靠一种技术完成安防监控系统是不可能的,在未来激光雷达必将与相机、GPS、移动巡检机器人等多行业技术融合
2020-02-29 17:03:44
效果 但跟无人驾驶相比,激光雷达在机器人身上好像更能快速落地:精度要求不那么高,成本更低、允许一定差错…… 激光雷达的应用,可以帮助机器人在未知环境中了解周边地图信息,为后续定位导航,甚至是人机
2019-02-15 15:12:28
、紧急刹车、车距保持等功能。 综述根据上面的介绍进行简单的总结,三种雷达各自的特点及优劣势如下: 制式参数超声波雷达 激光雷达毫米波雷达 最大距离近远较远距离、角度分辨率一般 很高 高环境适应性易受
2019-09-19 09:05:02
的一部分。鉴于目前激光雷达的高成本,摄像头配合高精度地图是另一种较低成本的技术路线。除了与高精度地图配合为自动驾驶提供定位服务,摄像头还可以在地图采集过程中作为低成本且数据传输量小(摄像头捕捉的是小尺寸
2017-09-06 11:36:58
自动导航车(Automatic Guided Vehicle,即AGV)领域的固态激光雷达CE30。对比传统的机械式激光雷达,激光雷达是通过机械转轴的高速旋转来完成四周环境的扫描。固态激光雷达顾名思义
2017-12-07 14:47:45
消耗是巨大的,虽然并没有达到像训练神经网络动用服务器集群那种地步,但传统上需要PC级别的处理器。除配备激光雷达外,还需要机器人具有IMU(惯性测量单元)、里程计来为激光雷达提供辅助数据,否则SLAM系统
2017-06-30 15:05:26
iphone12这个亮点不在5G上面,毕竟国内的一些厂商早就已配备,也不在颜色,重点在于配备了一颗激光雷达!先说一下这个激光雷达带来的用途,最直接的就是能够快速精准对焦,即使在晚上也能够很好实现
2021-07-22 09:12:51
空间激光雷达最小接收光功率的计算【摘要】采用信号检测的统计思想,在详细分析雷达接收机各种噪声大小与概率分布、计算空间背景光大小和光谱特性的前提下,基于信号检测理论中的虚警概率和发现概率提出了一种能
2009-05-15 01:20:13
#什么是激光雷达?如今,"激光雷达"已不是什么陌生的概念了,特别是随着自动驾驶的热潮,它也备受瞩目。 激光雷达实际上是一种工作在光学波段(近红外)的雷达,最早对它的定义
2018-09-10 14:21:58
,通常由陀螺仪、加速计和算法处理单元组成,通过对加速度和旋转角度的测量得出自体的运动轨迹,在导航中有着很重要的应用价值。我们把传统的 IMU 和与车身、GPS 等信息融合的算法组合在一起的系统称为广义
2018-10-30 11:51:34
SLAM 前端里程计做累加,可以配合高精地图的图匹配,做类似后端回环优化的方式,将GPS、激光雷达及已知地图进行融合定位。3. 自动驾驶多对双目视觉摄像头SLAM方案这种方案成本低,更加考究的是算法,有很少
2019-05-09 04:41:09
传感器技术1.3.1 摄像头1.3.2 毫米波雷达1.3.3 激光雷达1.3.4 超声波雷达1.4 导航与定位技术1.4.1 卫星定位系统和捷联惯导航系统的组合定位技术1.4.2 激光雷达点云和高精地图的匹配定位技术1.4.3 计算机视觉里程算法的定位
2021-08-30 08:36:23
称为Class1,Class2, Class3A, Class3B, Class4。现在市面上常见的激光雷达基本上都达到IEC标准的Class1等级,即在可预见的工作条件下是一种安全设备,不会对人体产生任何损害
2018-09-10 16:32:46
机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光雷达、IMU、轮式里程计、麦克风、音响、摄像头,和用于处理信息的嵌入式主板。关于传感器的ROS驱动程序开发和在机器人上的使用在后面的章节会展开,...
2021-12-17 06:58:27
请问激光雷达和激光扫描仪的具体区别在哪儿?
2022-05-13 11:05:19
请问如何理解SLAM用到的传感器轮式里程计IMU、雷达、相机的工作原理?
2021-10-09 08:52:46
什么是声级计?声级计有哪些特性?怎样去设计一种基于MEMS的声级计?
2021-07-02 06:54:54
激光雷达是如何产生的?激光雷达在自动驾驶领域有什么作用?
2021-06-17 07:31:54
【作者】:白俊卿;卫育新;【来源】:《电子设计工程》2010年02期【摘要】:从工程实用和维护的角度出发,提出一种针对于车载组合导航系统的在线标定算法。该算法使用卡尔曼滤波作为估计工具,通过趋于一
2010-04-24 09:31:29
的环境感知系统一般由多个传感器组成,包括激光雷达、毫米波雷达、摄像头、GPS 等。其中,摄像头、毫米波雷达、激光雷达是无人驾驶汽车中最常用的三种环境感知解决方案。 摄像头的优点是成本低廉,图像算法
2017-08-21 14:54:32
,海洋激光雷达作为一种先进的海洋探索与监测手段,已经成为主流。 3D打印——扮演测量、监控等角色在3D打印里面也会有用到激光雷达的地方,如之前很火的Printoptical3D打印技术本质上是一种“从
2018-12-10 14:55:39
请问各位大咖,激光雷达的测量距离能到多少?
2022-10-05 03:18:49
四轴飞行器组合导航非线性滤波算法,四轴飞行器组合导航非线性滤波算法。
2016-05-16 11:56:08 11
11 针对三点和四点爬山算法对随机置换盒(S盒)的非线性度进行优化时计算量大及效率低的问题,提出了一种组合式爬山算法(CHC)。该算法把交换S盒两个输出数据的行为定义为一个交换元,利用加权择优函数,筛选
2018-01-05 16:57:050 移动底座和激光雷达与Cortex-A53平台都是通过串口来通信的。在基于Cortex-A53处理器的平台上处理激光雷达的扫描数据以及底座中采集的里程计数据,结合激光雷达的数据和里程计数据实现机器人的定位,并在定位的基础上利用雷达扫描数据实现二维地图构建。
2018-03-13 09:15:32 8952
8952 
MEMS微镜已经存在多年,甚至在视频投影机这样的日常设备中得到了应用。当今MEMS微镜的问题在于很难将其用于远距离激光雷达。远距离探测和大视场角是激光雷达的关键性能指标。典型的MEMS微镜的镜面尺寸小,偏转角度较小,因此无法达到理想的探测距离和视场角。
2019-04-16 11:33:4414082 在导航系统中,里程计(odometry)是一种利用致动器的移动数据来估算机器人位置随时间改变量的方法。例如,测量轮子转动的旋转编码器设备。里程计总是会遇到精度问题,例如轮子的打滑就会导致产生机器人移动的距离与轮子的旋转圈数不一致的问题。
2019-08-08 14:21:1325317 
激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强等优势
2019-09-26 09:42:157539 据麦姆斯咨询介绍,激光雷达(LiDAR)是一项使用激光实现测距并创建深度图的技术,但给人以昂贵且笨重的印象。MEMS微镜会如何帮助降低激光雷达成本?激光雷达如何实现物联网解决方案?下文将给予相关
2020-11-09 14:25:084729 激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强等优势。随着科技的不断发展,激光雷达的应用越来越
2021-03-30 16:37:008082 
激光雷达是什么? 激光雷达(英文:Lidar),激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强
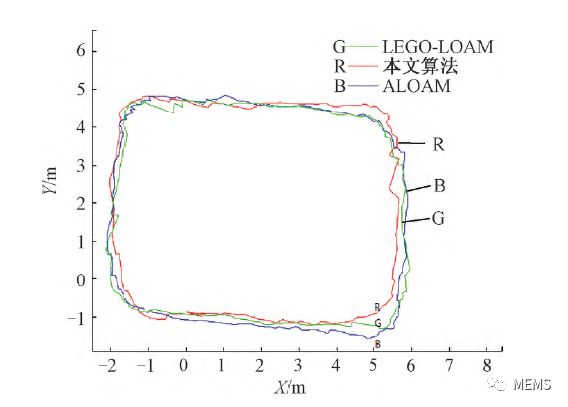
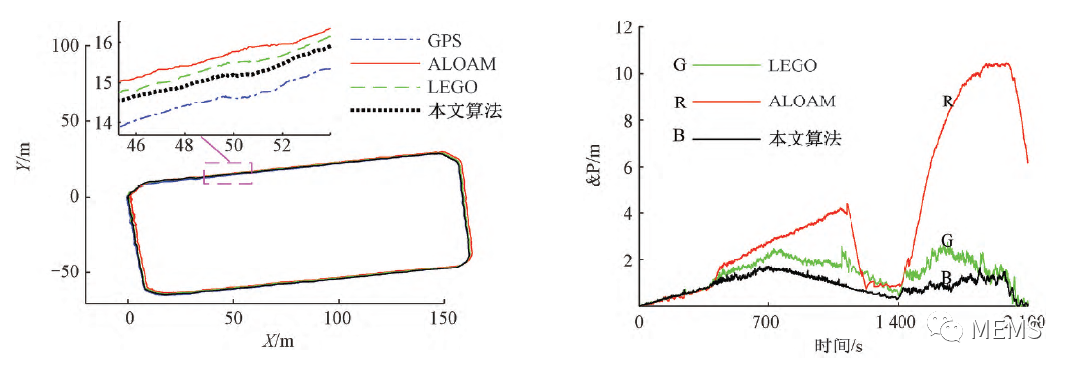
2022-06-20 16:53:4122721 从全称上可以看出,该算法是一个紧耦合的雷达惯导里程计(Tightly-coupled Lidar Inertial Odometry),借助的手段就是利用GT-SAM库中的方法。
2022-09-14 10:11:011405 LIO-SAM 提出了一个利用GT-SAM的紧耦合激光雷达惯导里程计的框架。实现了高精度、实时的移动机器人的轨迹估计和建图。
2022-10-31 09:25:491959 全球定位系统(GPS)作为一种机器人常用定位方式,受制于天气、无线电、遮挡等环境因素,导致导航系统实时性与可靠性难以保证,环境的未知以及机器人运动的不确定性会对SLAM系统的鲁棒性与稳定性提出更高要求,为了解决这一问题,有必要进一步研究SLAM以及惯性导航技术。
2022-11-03 10:09:511419 方案(ORB SLAM)、基于激光雷达的里程计方案(Hector SLAM)、基于IMU的里程计方案,以及多传感器融合的方案。
2023-04-19 10:17:521064 提出一种新型的视觉-LiDAR里程计和建图系统SDV-LOAM,能够综合利用相机和激光雷达的信息,实现高效、高精度的姿态估计和实时建图,且性能优于现有的相机和激光雷达系统。
2023-05-15 16:17:21433 
固态激光雷达通常分为哪三种类型?mems固态激光雷达 固态激光雷达是一种基于激光技术的高精度测量仪器,它利用激光器发射激光束,并通过接收器接收反射回来的激光信号,根据信号的时间差来计算出目标的距离
2023-08-22 16:45:361610 只发射一条激光束,而多线激光雷达则同时发射多条激光束。单线激光雷达通常使用旋转镜和激光二极管的组合来扫描周围环境。它通过旋转镜的旋转来改变激光束的方向,并通过激光二极管发射脉冲激光。而多线激光雷达则可以通过多个激
2023-12-07 15:48:331851 激光雷达导航是通过360度旋转雷达对周围10米以内平面空间进行扫描,并生成平面地图;根据雷达扫描出来的平面地图结合碰撞、沿墙等不同的传感器取得的数据来进行
2021-11-17 10:10:25
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论