KUKA库卡C4机器人驱动器故障报警维修库卡机器人维修内容包括库卡机器人示教器维修,KUKA伺服驱动模块维修,库卡机器人伺服电机维修,KUKA机械手PC工业电脑维修,库卡机器人电路板维修,库卡机器人
2021-09-17 07:09:52
1 开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在
2019-07-15 07:48:36
KUKA库卡机器人伺服驱动器(Servo Drive)是KUKA运动控制的重要组成部分,被普遍应用于工业机器人及数控加工中心等自动化设备中。是用来控制伺服电机的一种控制器,其作用类似于变频器作用于
2020-09-08 16:30:28
KUKA焊接机器人伺服电机常见故障及维修处理1、库卡机器人伺服电机的基本检查由于库卡机器人伺服电机内含有精密检测器,因此,当发生碰撞、冲击时可能会引起故障,在对库卡机器人伺服电机维修时应作如下检查
2020-09-26 16:51:21
这个是KUKA重型机器人处理和测量混凝土轨枕的视频。处理得相当精细。真心值得爱好机器者和爱国者研究研究。
2015-02-03 15:18:31
据麦姆斯咨询介绍,控制和通信IC的发展在实现下一代的机器人中起到重要作用。然而,这些复杂的现代机器人的核心是许多新的、小型化和低成本的传感技术的出现与融合。对实现下一代机器人至关重要的几项关键传感器技术包括磁性位置传感器、存在传感器、手势传感器、力矩传感器、环境传感器和电源管理传感器。
2020-08-18 06:41:14
想弄一个vi可以动态显示机器人的姿态,但不知道有什么函数可以引入机器人的模型,帮帮忙,谢谢。
2012-02-11 17:25:22
的木板搭建,表面为白色,C区为走廊,D区为房间外的空地。1.基本要求(1)机器人能和监控台实现无线通信,通讯距离达到15m。(2)初始状态的机器人在D区任何位置,在监控台的控制下,机器人能进行自行搜索
2012-05-26 17:16:47
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理机器人的基本工作原理是示教
2021-09-13 08:40:55
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
、KUKA、Yaskawa Motoman、FANUC2.2.1 本体结构本体结构分类:不同机器人建模控制的本质区别关节型机械臂:串联垂直多关节6轴机器人SCARA机械臂:笛卡尔机械臂:Delta并联机械臂:双平行四边形机械臂(码垛机器人)其他类型机械臂:圆柱形、球坐标符号表示机器
2021-09-08 07:44:15
什么是PID控制?机器人设计中PID控制的编程方法是什么?
2021-06-30 06:53:20
将系统分为算法实现和仿真模块、DSP控制模块、及机器人驱动模块,以验证算法的有效性。
KUKA KRAGILUS工业机器人的实体控制测试:最终,项目工业机器人的实体控制。在LabVIEW建立的3D仿真
2023-12-21 20:03:18
自动或半自动机器人常常需要嵌入式控制系统,从而能够结合高度智能化的确定性控制,并且可以方便地连接到不同的传感器和执行器上。NI提供了多种嵌入式硬件平台,以满足复杂系统的需求。从尖端的机器人研究项目直至高级行业应用,NI平台被证实是高效的机器人解决方案。
2019-11-06 07:50:49
摘要我们提出了一个新的开源机器人的腿部力矩控制系统,这个系统的特点是低成本及结构简单。这个系统由高力矩无刷直流舵机和适合阻抗调节和力矩控制的低传动结构组成。同时我们也设计了一个适应冲撞的新型足底
2021-09-13 06:33:53
【深联华杯】wifi远程监控智能机器人
2014-01-11 19:51:57
力/力矩传感器被广泛的应用与各个工业领域,如产品测试,机器人装配,打磨和抛光等。在研究领域传感器被用于外科手术机器人,仿生机器人,康复机器人,以及神经学等其他不同的应用中。而随着力矩传感器在工业
2018-12-07 10:43:12
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
《先进机器人控制》从控制的角度系统地介绍了机器人学的基础知识和当前的发展状况。全书共分为12章,由基础篇、控制结构篇和先进控制篇构成。基础篇着重介绍串联关节机器人的运动学、运动规划和动力学。其中
2017-09-19 15:30:57
,FANUC全球机器人装机量已超25万台,市场份额稳居第一。 2.库卡(KUKA) 库卡(KUKA)及其德国母公司是世界工业机器人和自动控制系统领域的顶尖制造商,它于1898年在德国奥格斯堡成立,当时
2015-01-20 09:56:25
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-07-05 07:08:47
关于kuka库卡机器人保养注意事项——库卡机器人发表时间:2020-07-15一、库卡工业机器人本体维护保养1、普通维护1)清洗机械手定期清洗机械手底座和手臂;可使用高压清洗设备,但应避免直接向
2021-09-08 07:02:29
`华南机器人应用培训中心拥有各种设备,开展各种不同的机器人培训班。打造各种工业现场常见的机器人工作站,现开展KUKA、发那科、三菱、ABB、爱普生工业机器人培训对外招生。 一、认识机器人技术:工业
2015-09-02 14:03:18
`最近这段时间做了一个基于树梅派的视频监控机器人平台 Verybot 照片如下: 这个平台的基本组成是:1、树梅派 ( Raspberry pi ) 嵌入式计算机;2、USB无线网卡( wifi
2014-01-21 21:17:04
随着科学技术的发展与劳动力成本逐年上升,未来世界的工业发展中,“机器人换人”将成为一种趋势。在未来世界的工业,我们可以想像,在车间里,都没有人,完全都是由机器人进行全自动化生产,机器人将代替取代人,而人只要负责监控与控制。大家如何看待工业机器人代替人?
2016-01-21 18:51:08
树莓派和其他机器人的控制器有何不同?如何使用树莓派开发智能机器人控制系统?
2021-12-23 06:55:02
现代喷涂作业中机器人喷涂已经越来越成为一种趋势。国外机器人喷涂技术较为成熟,其研究工作早在20世纪60年代就已经开始,目前的喷涂机器人市场依然由国外公司的机器人品牌主导,如德国的KUKA公司、瑞典
2021-12-20 08:06:23
各位大神,现在小弟想用LabVIEW控制安川机器人,可是通过调用motocom32的DLL不能和机器人通信,听说LabVIEW不能二次开发安川机器人,请问有熟悉安川机器人的高手指点一二,不胜感激!
2014-11-10 12:29:06
席文姣,陈帝伊,马孝义(西北农林科技大学 水利与建筑工程学院,陕西 西安712100)0引言如何设计智能灭火机器人控制器?控制器是智能机器人处理和控制信息的主体,它直接决定了机器人的行为和性能
2019-07-31 06:23:18
的通讯从而对机器人控制,实现远程对家里的监控和做一些简单的事情,请问这样通过互联网点对点的通讯该如何实现?是否需要建立服务器?
2014-10-25 13:31:35
工业机器人控制器功能多任务功能一台机器人可进行多个任务的操作;
2019-09-12 09:10:22
工业机器人中的伺服驱动的目的是什么?工业机器人中的关节内部驱动结构是怎样构成的?
2021-10-11 08:37:43
工具(如焊枪、喷嘴、机加工刀具、夹爪)与主构架的连接机构,它具有3个自由度。 驱动系统为机器人各运动部件提供力、力矩、速度、加速度。 测量系统用于机器人运动部件的位移、速度和加速度的测量。 控制器(RC
2015-01-19 10:36:12
时间的积累。本文以KUKA为例,分协作机器人iiwa和传统机器人KR两个大系列。协作机器人iiwa 当前主流的协作机器人都采用“模块化”思想的关节设计,采用直驱电机+谐波减速器的方式,每个关节的内部结构
2018-11-01 11:08:12
工业机器人是近两年机械行业最热的字眼,随着企业工业机器人的增多,很多机械工程师对于工业机器人充满了好奇。作为机器人四大家族之一的KUKA,已经被美的收购,小编这就带你走近KUKA工业机器人的内部结构
2021-07-05 06:44:21
传送给数据监控中心,实现其远程数据监控和故障诊断,发现问题并且迅速解决故障,在现代工业生产中具有重要意义。二、系统组成 工业机器人远程监控系统由四个部分组成:远程监控中心、工业无线路由、控制终端、网络
2022-02-23 18:52:11
库卡KUKA机器人四种启动方式1)自动运行说明 库卡机器人处于自动运行时,先要在手动状态时候选择需要运行的程序,然后通过钥匙开关切换机器人到自动运行状态,给机器人上电,然后启动机器人运行程序,让
2020-09-04 15:45:41
KUKA库卡机器人MGV电源模块维修PH1013-2840MGV电源维修 库卡电源模块维修 机器人电源模块维修 库卡控制器维修 KUKA电源维修KUKA库卡机器人电源模块维修MGV控制器维修
2021-09-08 07:30:00
怎么实现对机甲大师机器人的控制?
2021-11-19 06:33:45
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息处理
2019-08-21 07:51:24
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息处理
2019-08-30 08:23:42
模块: 除了作为大脑的安卓手机外,视频监控机器人还采用了Arduino单片机,用于控制电机舵机和连接传感器模块。 作为大脑的安卓手机与Arduino单片机是通过蓝牙串口(例如市面上常见的HC-06
2016-09-27 14:01:26
智能监控机器人是近年来机器人应用工程中一项前沿性的题目,智能化探测小车是智能行走机器人的一种。智能监控机器小车就是针对上述情况,在参考了目前大多数智能机器人的基础上,以降低成本为原则设计的。小车具备
2019-10-14 07:37:52
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-06-30 06:37:34
小白,刚入行,想请教一下各位大佬,pioneer 3-AT可以使用力矩进行控制吗?如果不行的话,哪些厂家的轮式移动机器人是开放力矩控制的?
2020-09-22 11:00:09
未来家庭的监控机器人应该要具备以下特征:1.拟人化设计,具有可爱的操作接口让人很容易从远 端监控.2.监控机器人可以储存所看到的影像,并通过远程传给家庭主人.3.监控机器人本身要有基本的感知
2019-10-30 02:25:39
驱动电路板 7、用于驱动电机的锂电池 8、机器人底盘 目前在这个平台上已经实验的功能包括:1、基于wifi的机器人运动控制;2、基于wifi的视频监控;3、基于openCV的目标检测(目前只做了圆形目标的检测);4、基于openCV的色标跟踪;`
2014-09-18 15:33:45
寻求KUKA机器人控制柜三维模型,做方案有时需要用到,大家谁有可以给我发一份吗?先谢谢了
2016-04-18 16:05:43
我看NI有Robotics Toolkit for KUKA KR C2的附加包,这个怎么用啊?如何和kuka机器人建立通讯啊?是Tcp接口吗?
2023-10-21 20:59:28
控制和通信 IC 的发展在实现下一代的机器人中起到重要作用。然而,这些复杂的现代机器人的核心是许多新的、小型化和低成本的传感技术的出现与融合。对实现下一代机器人至关重要的几项关键传感器技术包括磁性位置传感器、存在传感器、手势传感器、力矩传感器、环境传感器和电源管理传感器。
2019-07-31 07:46:31
KUKA机器人的资料在网上还是挺难找的,早期刚进公司,想自己找点资料学习,发现网上资料好少,而且内容很简单,直到最近,领导决心培养我负责KUKA的一条流水线,所以才把这些近乎“绝密资料”发给我学习。所以我自身也是初学者,希望把资料分享出来,大家能互相学习,互相交流进步
2016-03-08 23:45:26
,外星探测,核工业控制,手术机器人等等,在这些需要记录和传输视频的场合中,就必须给机器人搭载一个视频监控系统。视频监控系统是由实时控制系统、监视系统和管理信息系统组成。实时控制系统完成实时数据采集处理
2016-07-26 10:27:17
提出一种机器人手指尖六维力/ 力矩传感器,并对其弹性体结构进行详细论述;分析应变量与测量量的对应关系;采用现代设计手段对弹性体进行模态分析。并介绍了传感器放大处理
2009-07-08 12:57:25 36
36 针对未知环境下机器人主动柔顺控制在工程中实现的问题,构造了一个开放式机器人力控制系统。对系统中硬件和软件体系结构进行了分析,结合伺服驱动器的不同控制模式,给出
2009-08-10 09:43:069 KUKA机器人KRC4操作说明书.......
2015-12-23 14:47:4374 KUKA机器人TCP(工具中心点)设定.
2015-12-23 14:50:4936 kuka机器人当前最具市场主导地位的行业是汽车制造,除此之外,它在农业机械、电梯、PC、工程机械、轨道交通等等众多领域也具有非常强大的智能解决能力。不信,小编下面就重点为大家介绍几种KUKA机器人的智能化焊接解决方案,供各位看官品读。
2016-11-22 13:46:02 3011
3011 机器人力控制算法试验平台的设计与实现_周波
2017-03-19 11:31:311 FAMULUS。自FAMULUS问世后,KUKA带领机器人技术进入一个全新的时代,工业自动化的全球布局也正式拉开帷幕。 1996年,KUKA的工业机器人研发取得跨越性发展。由KUKA公司开发的首个基于PC机的控制系统开始投放市场,由此开创了真正的以软件、控制系统和机械设备的完美结
2017-09-29 17:11:140 KUKA机器人工具坐标系的建立执行方法:将待检测的工具安装在法兰上,找出一个合适的参考点 它可以是固定在工作空间的某一参考芯。
2017-10-16 15:15:348 本文档的主要内容详细介绍的是库卡编程资料入门课件库卡机器人基础教程和库卡C4编程指南及焊接机器人教程合集免费下载包括了:KUKA基础培训之1-机器人系统的结构和功能,KUKA基础培训之2-机器人运动
2019-04-22 08:00:0040 机器人理疗按摩师即将上岗!这是利用kuka LBR Med医疗机器人开发的新应用,配合内置的力矩传感系和精准的运动控制,比人类按摩师的力度、位置控制更精准,就是缺乏那么点“温度”。
2019-11-26 15:56:35739 KUKA 和 Tricor 公司最近共同完成了一个项目:一台灵敏型 KUKA LBR iiwa 机器人,可用于纸箱坯料的折叠和粘接。瓦楞纸板被运送至包装机器人的工作区域内。
2020-05-09 11:12:483560 变量$TORQMON包含程序模式下轴转矩的当前公差范围。该公差范围是使用文件…STEU Mada $ custom.dat中的变量$TORQMON_DEF定义的。
2020-06-11 16:25:117228 机器人在执行焊道位置示教程序时,当机器人运行到焊道轨迹点时,通过KUKA 用户程序记录焊道的程序号,焊点号,焊道图形属性和坐标值,然后存到PFO应用软件数据库里。
2020-06-30 17:11:521909 开启力监控后,力矩监控值对之后的轨迹点都有效果, 力矩监控变量$TORQMON会始终影响后面的轨迹点,直到将力矩监控值恢复默认值200.
2020-08-07 16:53:302958 
每个机器人的核心都是它的控制器--KUKA机器人在这方面得到了令人印象深刻的更新:未来兼容的硬件和智能软件确保KUKA工业机器人KRC5的新控制器具有极高的效率和最大的成本效益。
2020-08-10 09:36:154389 因此我就想如果我想在KUKA 机器人初期调试工作过程中减少互锁区设置失误而碰撞的损失,我们可否给变量$ TORQMON 减小。
2020-09-04 16:53:193401 Kuka推出了新系列的SCARA机器人。该公司表示,新型KR SCARA关节臂机器人是工业生产的可靠助手,在小零件装配,材料处理和检查任务等应用中表现出色。 Kuka称,在6公斤以下的有效载荷类别
2020-10-15 12:02:322330 力控制一般泛指机器人应用领域中,利用力传感器作为反馈装置,将力反馈信号与位置控制(或速度控制)输入信号相结合,通过相关的力/位混合算法,实现的力/位混合控制技术。也称力/位混合控制技术,简称力控制。
2020-12-10 09:38:582180 责任编辑:xj 原文标题:控制KUKA安全机器人的PLC标准功能块FB 292 文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
2020-12-23 16:23:162240 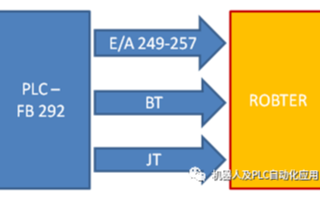
责任编辑:xj 原文标题:控制KUKA安全机器人的PLC标准功能块FB 292 文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
2020-12-23 17:53:162831 
本文档的主要内容详细介绍的是库卡(KUKA)机器人的操作手册免费下载。
2021-03-02 08:00:0023 KUKA库卡机器人MGV电源模块维修PH1013-2840MGV电源维修 库卡电源模块维修 机器人电源模块维修 库卡控制器维修 KUKA电源维修KUKA库卡机器人电源模块维修MGV控制器维修
2022-01-12 10:39:4011 KUKA机器人PN系统网络故障的判断方法说明。
2022-03-11 10:08:303156 ON_ERROR_PROCEED 可用于抑制由以下程序行触发的运行时错误消息。机器人控制器跳过触发错误的语句,并用有关错误的信息填充系统变量 $ERR。
2022-07-01 10:42:321991 SynchroMove软件在 机器人D盘中的KUKA_OPT文件夹中。
2022-11-29 09:55:111061 如果机器人与物体碰撞,则机器人控制器会增加轴转矩以克服阻力。这可能会损坏机器人,工具或其他物体。
2023-01-30 09:29:171169 为避免出现这一情况,可在暖机阶段监控电机电流:当其达到一个规定值时,机器人控制系统即降低运行速度。
2023-02-06 10:35:471037 KUKA机器人固定焊钳的铣削控制
2023-04-13 11:36:03519 如果机器人控制器在Multi-Submit模式下操作(仅适用于KUKA系统软件8.3及更高版本),则变量无效。多提交模式下机器人控制器的系统状态分组在变量$PROG_INFO[]中。
2023-05-15 09:54:11763 在使用workvisual对程序进行更改时提示需要输入用户名与密码,此时一头雾水,机器人工程师也蒙圈,在查找资料后kuka的默认
2023-05-19 17:33:403308 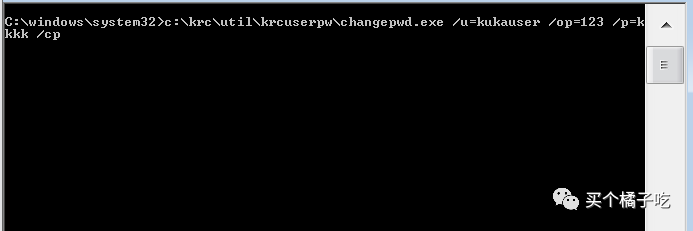
...KS_KUKA_DateienTechpaket8.2Basicxxxxxxxxxarchive.zip 机器人后台数据存储在标准档案中,必须恢复到控制器中。
2023-05-24 09:14:03308 
是指关联的提交解释器的状态。 通过变量校正函数读取/写入变量是指$INTERPRETER的当前值。 $INTERPRETER的可能值取决于机器人控制器所处的提交模式。 机器人控制器处于单次提交模式(默认操作模式): 0:提交解释器 1:机器人翻译 多提交模式
2023-05-29 10:02:34610 
KUKA机器人的PC是就是一个普通的PC,因此调整时间和更改普通PC的实践一样.
2023-05-29 11:10:163746 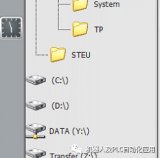
一般铣削 1.吹扫帽切割器 有三种变量可用于启动“KF吹扫” 变量1:(F330) 吹扫是通过“将旋转接头旋转到工作位置”命令开始的。对于机器人导向钳子,吹扫是根据“关闭钳子”命令开始。 变量
2023-05-31 09:13:34647 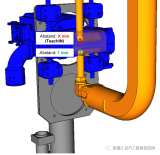
限制机器人力控性能的因素有很多,以下是一些主要的因素: 1. 力觉传感器性能:力觉传感器是机器人力控系统的重要组成部分,其性能会直接影响机器人的操作精度和稳定性。力觉传感器的误差、响应速度和可靠性
2023-11-08 16:33:45454 机器人力矩传感器原理: 在扭矩传感器中,通常会使用一种称为应变片的元件来检测弹性变形。 应变片是一种电阻应变敏感元件,它的电阻值会随着所受应力的大小而改变。当内外圈相对受扭力时,传感器会发生弹性变形
2023-11-08 16:41:16686 机器人关节力矩传感器的分辨力是指其输出信号能够区分的最小力矩值。 一般来说,分辨力越高的传感器能够感知和测量的力矩越小,输出的信号也越细腻。这对于需要精确控制机器人关节力矩的应用来说非常重要。 一些
2023-11-08 16:47:37595 力控机器人是一种能够感知和控制外部力或力矩作用的机器人系统。它具有实时感知和响应外部力的能力,通过传感器和控制算法实现对力的测量和控制,以实现与环境或人类用户的交互和协作。 力控机器人的内涵主要包括
2023-11-09 16:25:23155 在机器人速度模式下的外环力矩控制中,通常使用速度环和力矩环两个控制环路来实现。速度环控制机器人的关节速度,而力矩环控制机器人输出的力矩。 以下是实现速度模式下的外环力矩控制的一般步骤: 设定期望速度
2023-11-09 17:22:27199 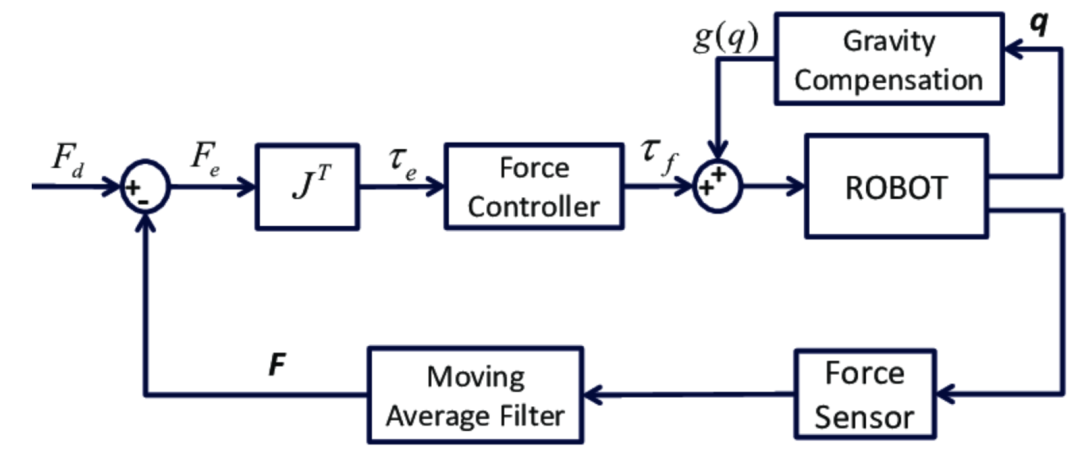
力控制的关键问题是如何准确地控制机器人的力或力矩输出,以满足特定的任务需求。以下是一些与力控制相关的关键问题: 1. 力/力矩传感器选择和校准:选择合适的传感器来测量机器人的力或力矩输出,并进行校准
2023-11-09 17:26:58239
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论