 电子发烧友App
电子发烧友App



根据国家犯罪记录局(NCRB)的数据,据估计,从2010年到2014年,印度因火灾事故造成超过1.2万人死亡。尽管对火灾事故采取了很多预防措施,但这些自然/人为灾难确实时不时发生。在发生火灾时,为了救人和灭火,我们被迫使用不安全的人力资源。随着技术的进步,特别是在机器人技术方面,很有可能用机器人代替人类来灭火。这将提高消防员的效率,并防止他们冒着生命危险。今天我们将使用Arduino构建一个消防机器人,它将自动感应火灾并启动水泵
在这个项目中,我们将学习如何使用Arduino构建一个简单的机器人,它可以向火移动并在火周围抽水来扑灭火。这是一个非常简单的机器人,可以教我们机器人的基本概念;一旦您了解了以下基础知识,您就可以构建更复杂的机器人。所以让我们开始吧...
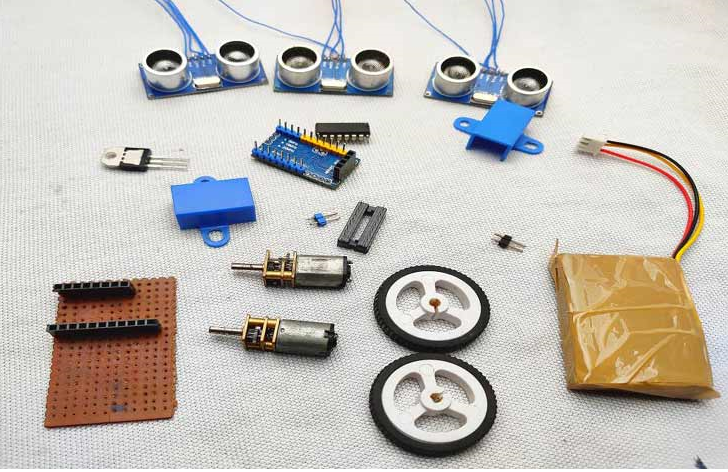
所需材料:
Arduino UNO
火灾传感器或火焰传感器(3 个)
伺服电机 (SG90)
L293D电机驱动模块
微型直流潜水泵
小型面包板
带电机(2)和轮子(2)的机器人底盘(任何类型)
一个小罐头
连接线
消防机器人工作理念:
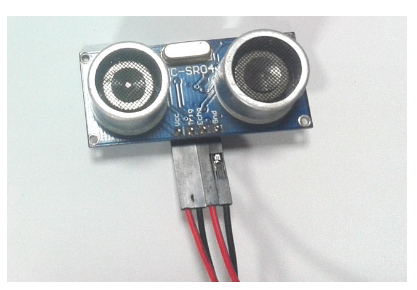
该项目的主要大脑是Arduino,但为了感知火灾,我们使用如下所示的火灾传感器模块(火焰传感器)。
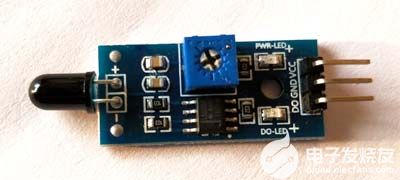
如您所见,这些传感器有一个红外接收器(光电二极管),用于检测火灾。这怎么可能?当火燃烧时,它会发出少量的红外线,这种光会被传感器模块上的红外接收器接收。然后,我们使用运算放大器检查红外接收器两端的电压变化,这样,如果检测到火灾,输出引脚(DO)将给出0V(LOW),如果没有火灾,输出引脚将为5V(HIGH)。
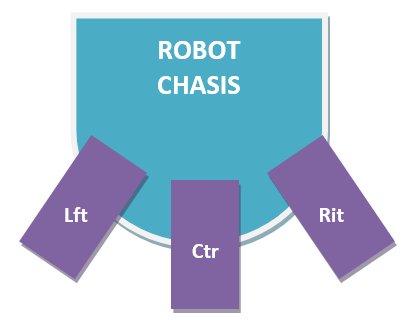
因此,我们在机器人的三个方向上放置了三个这样的传感器,以感知火在哪个方向燃烧。
我们检测火灾方向,我们可以通过L293D 模块驱动电机来使用电机在火灾附近移动。当靠近火灾时,我们必须用水将其扑灭。使用一个小容器我们可以携带水,容器中还放置了一个5V泵,整个容器放置在伺服电机的顶部,以便我们可以控制必须喷水的方向。现在让我们继续连接
电路图:
下面给出了该消防机器人的完整电路图
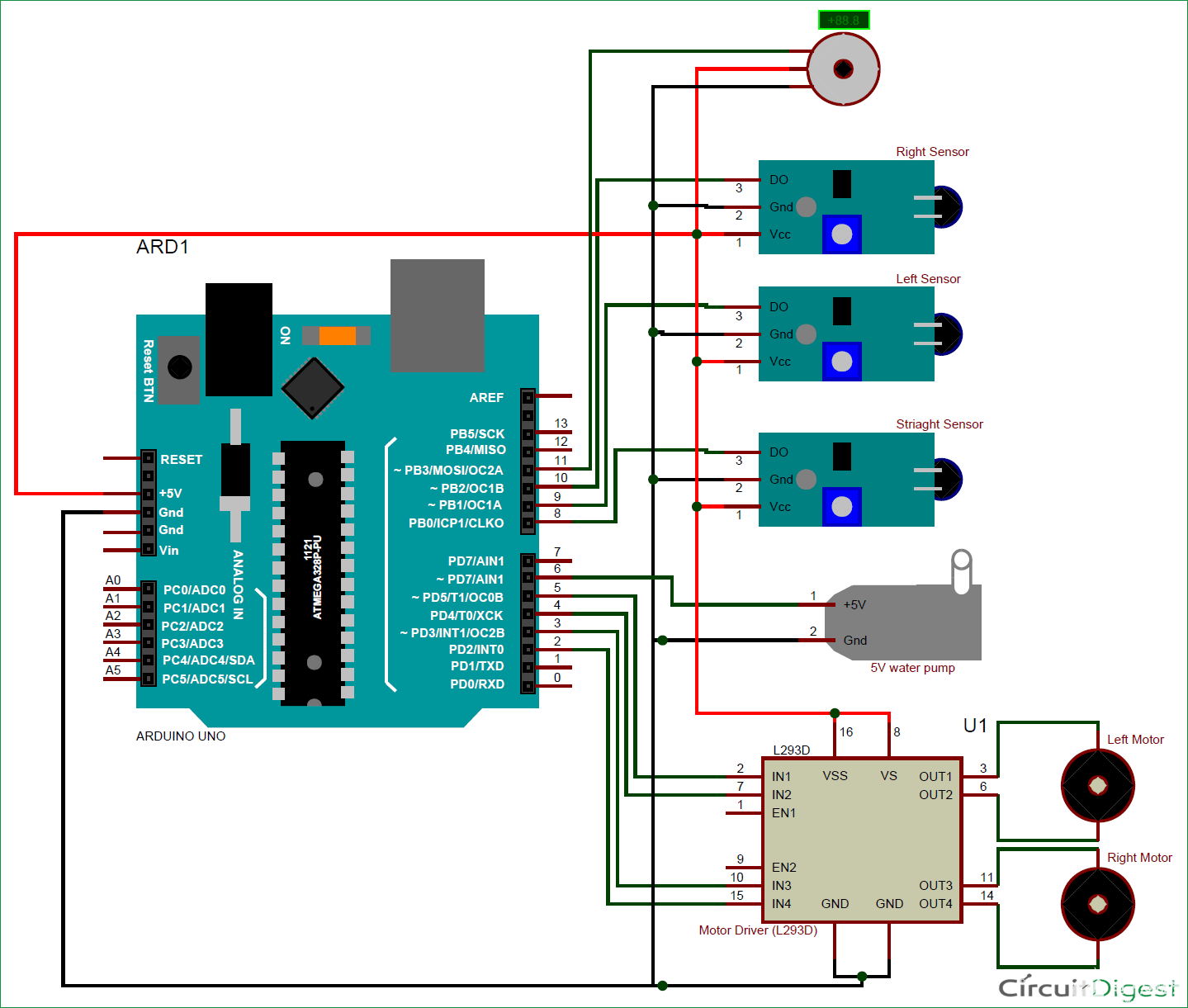
您可以连接所有显示的连接以上传程序以检查工作情况,也可以完全组装机器人,然后继续连接。这两种方式的连接都非常简单,您应该能够正确处理。
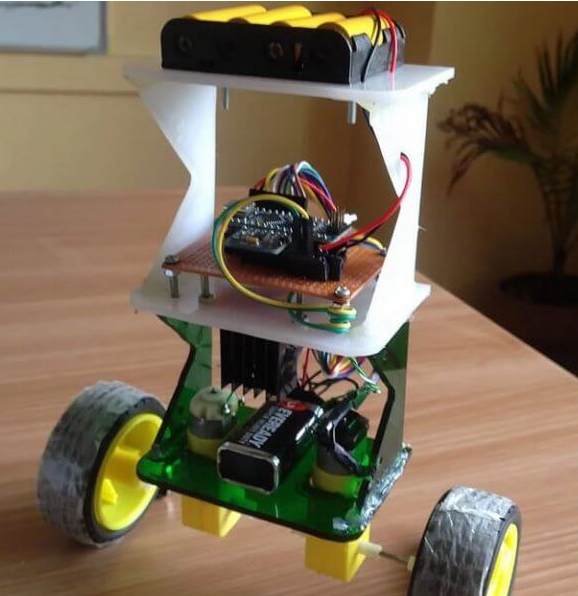
根据您使用的机器人底盘,您可能无法使用我正在使用的相同类型的容器。在这种情况下,请发挥自己的创造力来设置泵送系统。但是,代码将保持不变。我用一个小铝罐(冷饮罐)将泵放在里面,然后在里面倒水。然后,我将整个罐子组装在伺服电机的顶部,以控制水的方向。我的机器人组装后看起来像这样。
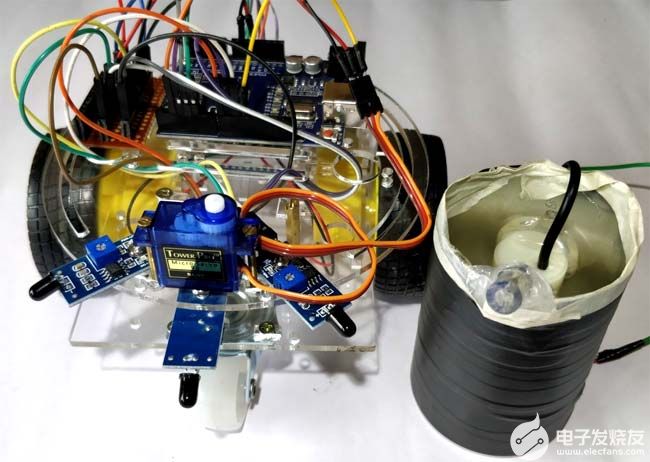


如您所见,我已使用胶水将伺服翅片固定在容器底部,并使用螺母和螺栓将伺服电机固定在底盘上。我们可以简单地将容器放在电机顶部,然后触发其中的泵通过管子向外泵水。然后可以使用伺服器旋转整个容器以控制水的方向。
对 Arduino 进行编程:
准备好硬件后,您可以上传Arduino代码以进行某些操作。本页末尾给出了完整的程序。但是,我在这里进一步解释了一些重要的零碎内容。
众所周知,火灾传感器在发生火灾时将输出高电平,在发生火灾时将输出低电平。因此,我们必须继续检查这些传感器是否发生火灾。如果没有火灾,我们要求电机保持停止,使所有引脚高,如下所示
if (digitalRead(Left_S) ==1 && digitalRead(Right_S)==1 && digitalRead(Forward_S) ==1) //If Fire not detected all sensors are zero
{
//Do not move the robot
digitalWrite(LM1, HIGH);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, HIGH);
}
同样,如果发生火灾,我们可以通过旋转相应的电机来要求机器人向该方向移动。一旦它到达火场,左右传感器将不会检测到火势,因为它会直立在火场前方。现在我们使用名为“fire”的变量来执行函数来熄火。
else if (digitalRead(Forward_S) ==0) //If Fire is straight ahead
{
//Move the robot forward
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
fire = true;
}
一旦变量火灾变为真,消防机器人arduino代码将执行put_off_fire功能,直到火灾被扑灭。这是使用下面的代码完成的。
while (fire == true)
{
put_off_fire();
}
在 put_off_fire() 中,我们只需要通过使所有引脚变高来停止机器人。然后打开泵将水推出容器,同时我们还可以使用伺服电机旋转容器,使水均匀地分开。这是使用下面的代码完成的
void put_off_fire()
{
delay (500);
digitalWrite(LM1, HIGH);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, HIGH);
digitalWrite(pump, HIGH); delay(500);
for (pos = 50; pos <= 130; pos += 1) {
myservo.write(pos);
delay(10);
}
for (pos = 130; pos >= 50; pos -= 1) {
myservo.write(pos);
delay(10);
}
digitalWrite(pump,LOW);
myservo.write(90);
fire=false;
}
消防机器人工作:
建议分步检查机器人的输出,而不是第一次一起运行。您可以将机器人构建到伺服电机上,并检查它是否能够成功跟踪火灾。然后您可以检查泵和伺服电机是否正常工作。一旦一切按预期工作,您就可以运行下面的程序并享受消防机器人的完整工作。

机器人的完整工作可以在下面的视频中找到。可以检测到火灾的最大距离取决于火灾的大小,对于小火柴棍来说,距离相对较小。您还可以使用模块顶部的电位计来控制机器人的灵敏度。我用移动电源为机器人供电,你可以使用电池,甚至可以用12V电池供电。
/*------ Arduino Fire Fighting Robot Code----- */
#include
Servo myservo;
int pos = 0;
boolean fire = false;
/*-------defining Inputs------*/
#define Left_S 9 // left sensor
#define Right_S 10 // right sensor
#define Forward_S 8 //forward sensor
/*-------defining Outputs------*/
#define LM1 2 // left motor
#define LM2 3 // left motor
#define RM1 4 // right motor
#define RM2 5 // right motor
#define pump 6
void setup()
{
pinMode(Left_S, INPUT);
pinMode(Right_S, INPUT);
pinMode(Forward_S, INPUT);
pinMode(LM1, OUTPUT);
pinMode(LM2, OUTPUT);
pinMode(RM1, OUTPUT);
pinMode(RM2, OUTPUT);
pinMode(pump, OUTPUT);
myservo.attach(11);
myservo.write(90);
}
void put_off_fire()
{
delay (500);
digitalWrite(LM1, HIGH);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, HIGH);
digitalWrite(pump, HIGH); delay(500);
for (pos = 50; pos <= 130; pos += 1) {
myservo.write(pos);
delay(10);
}
for (pos = 130; pos >= 50; pos -= 1) {
myservo.write(pos);
delay(10);
}
digitalWrite(pump,LOW);
myservo.write(90);
fire=false;
}
void loop()
{
myservo.write(90); //Sweep_Servo();
if (digitalRead(Left_S) ==1 && digitalRead(Right_S)==1 && digitalRead(Forward_S) ==1) //If Fire not detected all sensors are zero
{
//Do not move the robot
digitalWrite(LM1, HIGH);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, HIGH);
}
else if (digitalRead(Forward_S) ==0) //If Fire is straight ahead
{
//Move the robot forward
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
fire = true;
}
else if (digitalRead(Left_S) ==0) //If Fire is to the left
{
//Move the robot left
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, HIGH);
}
else if (digitalRead(Right_S) ==0) //If Fire is to the right
{
//Move the robot right
digitalWrite(LM1, HIGH);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
delay(300); //Slow down the speed of robot
while (fire == true)
{
put_off_fire();
}
}







 工商网监
工商网监
评论