今天给大家讲讲工业机器人内部结构的知识,主要是控制、驱动、传动、执行等一些有关于机器人的基础知识。
2019-02-28 09:38:47 5322
5322 本菜鸟刚学机器人控制,对于两关节机器人,实现既定的末端轨迹,轨迹规划已完成,但是程序的延时不准确,导致最终轨迹混乱,求大神破?
2015-04-29 16:21:23
请各位大神指导,移动式机器人是怎么做EMC保护的,机器人是锂电池供电,所以就不能接大地了,那么对机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
机器人关节是机器人各个零部件之间发生相对运动的机构。关节之中,单独驱动的为主动关节,反之称为从动关节。机器人关节模组通常采用超声波电机、伺服电机、谐波减速器、VR减速器、行星齿轮箱电机等。机器人关节
2021-05-27 11:26:11
`在论坛看到了那个波士顿动力公司的斑点 猎豹 大狗 野猫 这几种军用机器人,也看了那些个测试视频,他们的那些关节结构是怎样设计的啊?是液压还是机械?`
2015-03-09 11:41:04
。 1、自由度 机器人具有的独立坐标轴运动的数目。机器人的自由度是指确定机器人手部在空间的位置和姿态时所需要的独立运动参数的数目。手指的开、合,以及手指关节的自由度一般不包括在内。.机器人的自由度
2017-08-15 14:00:52
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
、KUKA、Yaskawa Motoman、FANUC2.2.1 本体结构本体结构分类:不同机器人建模控制的本质区别关节型机械臂:串联垂直多关节6轴机器人SCARA机械臂:笛卡尔机械臂:Delta并联机械臂:双平行四边形机械臂(码垛机器人)其他类型机械臂:圆柱形、球坐标符号表示机器
2021-09-08 07:44:15
芯片TMS320L F2407A 控制器的接口电路,介绍了该芯片在多关节机器人控制系统中的使用。解码器内部具有16 位硬件计数器,与CPU 接口方便,非常适合于多轴闭环运动控制系统的开发。[hide]/replyview]
2009-12-17 16:12:31
和实训考核任务,符合技能鉴定考核标准;ZN-IRW02型 工业机器人装调维修实训平台采用关节式结构,按工业标准要求设计,结构简单、紧凑,适用于机器人装调与维修实训,可锻炼学生动手能力和精密装配能力,各
2021-09-17 08:53:31
小型机器人,20cm左右的,现在有没有球形关节元件?
2015-09-04 11:27:17
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
` 本帖最后由 大连云港 于 2015-1-19 11:02 编辑
工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现
2015-01-19 10:58:38
降低了维护和保养的成本。三、适应复杂场景人形机器人的内部结构十分复杂,关节数量多达25-50个,且零部件微型化、类型多、用量大。伺服电动缸的微型化和高精度特性使其能够适应这种人形机器人的特殊需求。通过
2025-02-06 09:04:39
《先进机器人控制》从控制的角度系统地介绍了机器人学的基础知识和当前的发展状况。全书共分为12章,由基础篇、控制结构篇和先进控制篇构成。基础篇着重介绍串联关节机器人的运动学、运动规划和动力学。其中
2017-09-19 15:30:57
`工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可
2017-08-09 16:30:09
机器人是先进的机电一体化数字化装备,集机械、电子、控制、计算机、传感器、人工智能等多学科高新技术于一体,技术附加值很高。对提高产品的质量与产量、保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率
2015-09-02 14:03:18
与控制就要其转换为MCU可以识别的数字信号。 3、伺服电机组 实现变结构的动力来源于安装在机器人四只关节处的四个伺服电机。它在“变结构智能服务机器人” 的控制系统中
2013-10-31 13:05:45
机器人结构本体能够有效承受运动冲击、模拟四足动物运动的先决条件;高性能驱动器为机器人运动提供足够动力,行走稳定性控制负责协调多个关节驱动器,实现机器人稳定行走;强化学习则在复杂环境感知决策、不确定模型
2021-09-15 06:54:01
的关节系统的硬件架构。同时介绍了基于此硬件关节搭建的控制软件系统。 双足机器人相比于一般的移动机器人在非结构化环境中具有更好的移动能力,因而受到研究者的广泛关注。控制机器人获得快速的行走速度以及实现跑动
2012-12-06 15:32:52
树莓派和其他机器人的控制器有何不同?如何使用树莓派开发智能机器人控制系统?
2021-12-23 06:55:02
如何对采集机器人的关节位置及TCP位置进行虚拟仿真?
2021-10-08 06:31:46
各位大神,现在小弟想用LabVIEW控制安川机器人,可是通过调用motocom32的DLL不能和机器人通信,听说LabVIEW不能二次开发安川机器人,请问有熟悉安川机器人的高手指点一二,不胜感激!
2014-11-10 12:29:06
席文姣,陈帝伊,马孝义(西北农林科技大学 水利与建筑工程学院,陕西 西安712100)0引言如何设计智能灭火机器人控制器?控制器是智能机器人处理和控制信息的主体,它直接决定了机器人的行为和性能
2019-07-31 06:23:18
。2、铰链型操作臂(关节型)关节机器人的关节全都是旋转的, 类似于人的手臂,工业机器人中最常见的结构。它的工作范围较为复杂。①汽车零配件、模具、钣金件、塑料制品、运动器材、玻璃制品、陶瓷、航空等的快速
2018-10-12 10:16:22
工业机器人中的伺服驱动的目的是什么?工业机器人中的关节内部驱动结构是怎样构成的?
2021-10-11 08:37:43
,将从驱动器、电机和本体三个部分来介绍。1、伺服驱动层机器人关节的驱动是由电机完成的,作为机器人运动控制的最底层,伺服驱动的目的是改善驱动器的动态特性,提高伺服和抗扰性能。常说的三环控制(位置环、速度环
2021-06-28 09:29:31
(Service Robots)。其中,目前工业机器人又佔全球机器人80%的市佔率,远高于服务型机器人。若以机械结构来看,工业机器人可区分为单轴机器人、座标机器人、水平多关节机器人(SCARA)、垂直多关节机器人以
2021-09-07 07:13:08
、逆向运动学求解,以实现机器人的操作空间坐标和关节空间坐标的相互转换,完成机器人的轨迹规划任务,实现高速伺服插补运算、伺服运动控制。控制器主要分为硬件和软件两部分:硬件是指工业控制板卡,包括主控单元
2017-08-23 15:10:27
工业机器人一般由主构架(手臂)、手腕、驱动系统、测量系统、控制器及传感器等组成。 1图是工业机器人的典型结构。机器人手臂具有3个自由度(运动坐标轴),机器人作业空间由手臂运动范围决定。手腕是机器人
2015-01-19 10:36:12
)机器人的系统结构一台通用的工业机器人,按其功能划分,一般由3个相互关连的部分组成:机械手总成、控制器、示教系统,如图所示。机械手总成是机器人的执行机构,它由驱动器、传动机构、机器人臂、关节、末端操作器
2017-12-15 10:25:19
时间的积累。本文以KUKA为例,分协作机器人iiwa和传统机器人KR两个大系列。协作机器人iiwa 当前主流的协作机器人都采用“模块化”思想的关节设计,采用直驱电机+谐波减速器的方式,每个关节的内部结构
2018-11-01 11:08:12
工业机器人是近两年机械行业最热的字眼,随着企业工业机器人的增多,很多机械工程师对于工业机器人充满了好奇。作为机器人四大家族之一的KUKA,已经被美的收购,小编这就带你走近KUKA工业机器人的内部结构
2021-07-05 06:44:21
组成(台皮带线输送模组、视觉定位及检测模组、码垛模组、装配模组、打螺丝模组、取料模组、机器人TCP标定模组、PC模组等)。通过对该工业机器人视觉装配实训平台的6关节机器人和平面关节机器人、多功能夹具
2021-07-01 12:05:38
`随着中国科学技术发展迅猛,未来中国将成为为微型智能机器人大国。如今智能机器人需求量不断增长,其控制系统和自动化主要的产品超声波电机的需求也将大幅度增长,机器人手指关节用超声波电机作为微型智能机器人
2020-11-02 11:21:13
超声波电机一般安装在机器人手指关节处,机器人的关节驱动离不开伺服系统,机器人关节越多,对柔性及精准度就越高,所需的超声电机数量就越多。机器人对关节驱动电机的要求非常严格,因为超声波电机具有以下优势
2020-11-24 11:30:02
怎么实现对机甲大师机器人的控制?
2021-11-19 06:33:45
。 .但与液压驱动装置相比,功率较小,刚度差,噪音大,速度不易控制,所以多用于精度不高的点位控制机器人。1、具有速度快、系统结构简单,维修方便、价格低等特点。适于在中、小负荷的机器人中采用。但因难于实现伺服
2018-10-30 15:11:29
与液压驱动装置相比,功率较小,刚度差,噪音大,速度不易控制,所以多用于精度不高的点位控制机器人。1、具有速度快、系统结构简单,维修方便、价格低等特点。适于在中、小负荷的机器人中采用。但因难于实现伺服控制
2018-10-30 15:02:58
。步进电机芯片通过将控制信号转化为驱动信号,实现了机器人转动的精准控制,从而满足了儿童陪护机器人对转动控制的需求。
在儿童陪护机器人中,步进电机芯片有着广泛的应用场景。例如,儿童陪护机器人中的摄像头需要
2023-05-11 15:12:45
的6轴关节式操作机,它由驱动器、传动机构、机械手臂、关节以及内部传感器等组成。2、机器人控制柜:它是机器人系统的神经中枢,包括计算机硬件、软件和一些专用电路,负责处理机器人工作过程中的全部信息和控制其
2020-11-16 16:18:45
]昨天 14:47 上传内容介绍《自律型机器人制作入门:基于Arduino》基于开源硬件思想,完全公开各个结构件的外观尺寸,控制板基于开源硬件领域内广泛使用的Arduino,采用在Arduino之上又封装
2016-06-23 11:18:52
一、舵机实物图 舵机是机器人旋转关节中的常用部件,尤其是小型机器人。其实物就像下面这张图,相信大家都不会陌生。大家一定见过春晚上哪个跳舞的小机器人,其全身各关节都是有舵机组成。我们常见到的舵机
2021-01-11 16:16:14
部分组成:微型超声电机手指结构、微型超声电机驱动电源及运动算法、微型闭环控制管理。<span]微型超声电机手指结构:<span]以人的手指同比例进行机器人手指结构设计,将特种
2020-09-28 14:08:22
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:02:00
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:07:26
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 15:15:06
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-17 15:25:07
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 16:12:03
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 16:25:29
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 17:40:55
TA6-R5协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
2023-04-17 17:49:50
产品优势专注机器人关节研发,RJS系列关节模组具有定位精度高、性能可靠等特点。 模块化设计RJS关节模组集成无框电机、驱动器、谐波减速器、编码器、制动器于一体,结构小巧紧凑,6轴RJS关节
2023-04-18 14:04:34
机器人关节电机是专业为机器人关节设计研发生产。电机既有中空大孔径,能保证关节模组完美融合的组合, 电机的定转子机构紧凑,转子采用了高性能稀土永磁材料,此系列电机转矩脉动极低,易于速度控制和精确
2023-04-18 17:35:19
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 08:48:46
TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产应用需求。模块化
2023-04-19 09:16:32
TB6-R3协作机器人是一款灵活的小型工业协作机器人,其精巧的机械结构设计,外形紧凑,能够适应狭小的工作空间,及高精密的工作任务需求;这款协作机器人自重仅为11.5KG,有效负载为3KG,工作半径达666mm,是轻型装配和高精度控制的理想选择。
2023-04-19 10:18:50
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:48:11
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:53:03
TA6-R5协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
2023-04-19 10:58:47
深圳泰科智能TA6系列协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足
2023-04-19 11:14:26
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-19 14:54:26
泰科关节机器人具备哪些优势? 一、编程简单可以让无编程经验的操作人员能快速设置和操作我们的直观、3D 可视化协作式机器人。只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏
2023-04-19 15:13:28
RJU系列关节模组——面向商业、生活服务类应用一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身
2023-04-19 15:23:14
机器人关节电机是专业为机器人关节设计研发生产。电机既有中空大孔径,能保证关节模组完美融合的组合, 电机的定转子机构紧凑,转子采用了高性能稀土永磁材料,此系列电机转矩脉动极低,易于速度控制和精确
2023-04-20 10:07:10
产品介绍 ABB机器人产品线丰富,包括多关节机器人、协作机器人、喷涂机器人、SCARA机器人以及自主移动机器人(AMR)等多关节机器人:ABB的多关节机器人是六轴关节型
2024-09-30 17:56:07
HJL系列行星滚柱丝杠线性关节模组• 专为人形机器人应用研发,提供定制化服务• 集行星滚柱丝杠、电机、编码器、拉压力传感器于一体• 强大推力,性能强劲,稳定可靠• 精巧结构设计,整体轻量化程度进一步
2025-02-21 14:55:54
HJR系列带力控旋转关节模组• 专为人形机器人应用研发,提供定制化服务• 集谐波减速器、电机、抱闸、编码器、驱动器、扭矩传感器于一体• 创新的谐波减速器结构,让关节模组整体轻量化程度进一步提升
2025-02-21 14:59:52
结构设计,更轻、更小、更紧凑• 快速组装人形机器人手臂,大幅缩短开发周期 人形机器人手臂轻量化人形机器人关节人形机器人关节参数
2025-02-21 15:04:19
你能了解关节型机器人的结构,从而对你加深对机器人的认识,增强你的设计能力和维修能力
2016-05-30 16:32:11 4
4 特有的机械结构和数学模型,建立一个新型全数字的基于DSP和FPGA的机器人位置伺服控制系统的软、硬件平台,实现对四关节实验室机器人的精确控制。
2017-09-01 11:25:4411 时间的积累。 本文以kuka为例,分协作机器人iiwa和传统机器人KR两个大系列。 协作机器人iiwa 当前主流的协作机器人都采用模块化思想的关节设计,采用直驱电机+谐波减速器的方式,每个关节的内部结构基本一致,只是大小不太一样,例
2017-10-09 11:33:003 针对用于激光焊接的关节型工业机器人运动误差控制问题,根据关节型工业机器人伺服控制和运动学原理,分析了机器人运动误差的积累过程,并对运动误差和伺服系统误差分别进行了测量和比较。结果表明,伺服系统误差是运动误差的重要组成部分。该结论对机器人激光焊接的路径控制具有一定参考意义。
2017-10-12 18:19:066 目前已经开发出了多种类型机器人机构,运动自由度从3自由度到7或8自由度不等,其结构有串联、并联及垂直关节和平面关节多种。目前研究重点是机器人新的结构、功能及可实现性,其目的是使机器功能更强、柔性更大
2017-10-16 16:30:2211 关节机器人的关节全都是旋转的, 类似于人的手臂,工业机器人中最常见的结构。它的工作范围较为复杂。
2018-07-13 10:01:303745 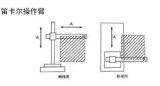
中国制造业发展的步伐越来越快,中国工厂使用的工业机器人数量越来越多,要想成为工业机器人技术型人才,工业机器人的内部构造必须要了解,下面为大家介绍一下通用工业机器人的构造。
2019-05-15 09:01:214844 
关节机器人的关节全都是旋转的, 类似于人的手臂,工业机器人中最常见的结构。它的工作范围较为复杂。
2019-05-21 17:19:468182 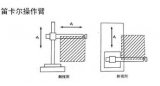
电动驱动装置又可分为直流(DC)、交流(AC)伺服电机驱动和步进电机驱动。直流伺服电机电刷易磨损,且易形成火花。无刷直流电机也得到了越来越广泛的应用。步进电机驱动多为开环控制,控制简单但功率不大,多用于低精度小功率机器人系统。
2019-11-08 10:47:015273 由C2机器人风扇故障联想到C2机器人的内部结构。
2020-09-13 09:11:164290 
现在工业机器人的自动化程度让人叹为观止,5轴6轴机器人具有如此多的关节,还能够做到运动和指令的精确传输,各部位紧密配合完成复杂的工作,让人不禁好奇它们的传动系统到底是怎样的,关节到底是什么结构的呢
2021-02-14 18:05:004604 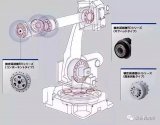
什么是超声波电机,超声波电机的原理及内部结构是什么?超声电机几乎无处不在,它能够实现电子控制的精准运动,可以应用于光学镜头、汽车制造、微型智能机器人、微型云台、精密转台、智能制造等等领域。
2021-01-26 08:00:002 机器人关节是机器人各个零部件之间发生相对运动的机构。关节之中,单独驱动的为主动关节,反之称为从动关节。机器人关节模组通常采用超声波电机、伺服电机、谐波减速器、VR减速器、行星齿轮箱电机等。
2021-05-28 09:11:442 机器人关节伺服控制系统设计与仿真
2021-06-22 14:53:1047 完成沿着X、Y、Z、(A、B、C)轴上的线性运动来进行的。 直坐标机器人 直坐标机器人控制系统 关节机器人 关节机器人,也称关节机械手臂或多关节机器人,其各个关节的运动都是转动,与人的手臂类似。关节机器人是当今工业领域中最
2022-11-02 14:59:563641 
主要是通过完成沿着X、Y、Z、(A、B、C)轴上的线性运动来进行的。直坐标机器人控制系统关节机器人关节机器人,也称关节机械手臂或多关节机器人,其各个关节的运动都是转
2022-10-27 11:19:412522 
作为行业领先的协作机器人关节模组供应商, RJSIIZ系列机器人关节模组是泰科智能专为3-20Kg以下协作机器人而设计,高度集成了包括无框力矩电机、低压直流驱动器、谐波减速机、制动器和双反馈装置。尺寸小,符合协作机器人紧凑、灵活的设计特点。
2023-04-20 15:02:391818 
实现服务机器人的顺畅、精准驱动的间接驱动的机制。
日本电产集团持有运用滑环和电位计等顺畅地控制服务机器人的关节和旋转部的技术。
例如,物流搬运机器人在使用上要求365天每天24小时运转,也有像看护用机器人和动力辅助服一样,必须具备非常坚固的结构和较高可靠性的机器人。
2022-10-05 12:58:041456 
机器人技术的迅猛发展已经在多个领域引起了革命性的变革,从制造业到医疗保健,再到日常生活。在机器人的运动控制中,伺服电机扮演着关键的角色,它们为机器人的关节提供了动力和精确的运动控制。机器人关节伺服
2023-09-22 08:17:425469 
泰科机器人几年前就研判人形机器人赛道将会成为热点,决定研发人形机器人适用的关节模组,经过艰苦的技术攻坚,泰科机器人推出了一系列适用于仿生机器人的轻量化大扭矩一体化关节:MJX系列和DJB系列关节模组,助力客户快速定制开发各类需求的机器人。
2023-11-22 11:12:341590 
关节机器人是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业。多关节机器人是指由多个可动关节构成的机器人系统,每个关节都能独立或协同作动。 CRT六轴双工位激光焊接
2024-03-07 08:42:492533 
关节模组是机器人关节控制系统中的核心组件,决定了机器人的运动控制与动作精准度。在关节模组中,位置反馈和误差校正是确保精确运动的关键,而双编码器设计正是为此而设计的。
2024-09-06 11:55:332568 
的精准与稳定,以及未来智能化升级将如何为机器人提供更加强大的运动能力。 舵机:机器人的灵动之源 舵机,作为机器人关节的核心部件,其重要性不言而喻。它集成了电机、减速器、传感器以及控制电路,形成了一个高度集成
2024-12-27 14:03:311034 关节机器人领域迎来一位实力选手。继布局移动机器人、机器视觉业务后,海康机器人正在拓展新的产品线。
2025-03-20 10:47:481310 ,重新定义了机器人的灵活性与精准度。 一、从基础到进阶:舵机驱动的关节进化 在机器人技术的早期,关节运动往往依赖于简单的电机和机械结构,虽然能够实现基本的动作,但灵活性和精准度却大打折扣。而舵机的出现,则彻
2025-04-10 15:19:22780 在当今科技飞速发展的时代,机器人已经广泛应用于工业制造、物流配送、医疗服务等众多领域。而机器人关节伺服控制作为机器人运动的关键技术,其性能的优劣直接影响着机器人的工作效率和精度。今天,我们就来聊聊MT6701绝对式磁编码器是如何优化机器人关节伺服控制的。
2025-08-04 17:57:12809 一分钟速览:从设备连接到编程控制,演示关节机器人的±180度精准转动。关节机器人±180度转动例程在科技高度发达今天,越来越多的智能机器人进入我们的日常生活中。究竟这些机器人是如何实现运动?工程师
2025-08-15 11:36:07684 
机器人关节模组是一种用于驱动机器人关节转动、轮子旋转或控制夹爪运动的装置。根据负载需求,机器人关节模组有多种类型。负载通常涉及扭矩、精度、操作速度、功耗等因素。机器人关节模组的工作原理是将能量转化为物理运动,通常产生线性或旋转运动。
2025-08-29 14:22:242792 
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论