本节内容主要讲述CortexR52内核Cache的具体操作包括使缓存无效(invalidate)操作,清除(clean)缓存。有的时候客户可能需要对cache做一些清理,比如invalidate
2024-07-15 10:32:11 2629
2629 
本节内容主要讲述CortexR52内核Cache的具体操作包括使缓存无效(invalidate)操作,清除(clean)缓存。有的时候客户可能需要对cache做一些清理,比如invalidate
2024-07-15 15:44:363105 
机器人操作系统浅析
2016-09-28 11:43:46
为主,尽管机器人开始有搭载摄像头的趋势,但对视觉的理解仍然较低,往往需要有明显的特征点作为辅助,同时抗干扰能力弱,对光照条件,部分遮挡等常见题目不能找到可靠的方法。 机器人技术对图像理解的要求是迫切
2015-01-23 15:02:27
的知识,来判定这些零件是不是不良品。某种程度上来说,你可以认为机器视觉是计算机视觉的孩子,因为它使用计算机视觉和图像处理的技术和算法。但是,虽然它可以用来指导机器人的,他又不完全是机器人视觉。它更侧重于
2020-08-28 10:48:50
视觉系统成为研究的新课题。1965年, Stanford建立机器人实验室开始研究机器人。机器人的定义:【机器人】是一种可以用来移动材料,零件,工具或特定装置的可以重新编程的多功能操...
2021-09-07 08:37:58
1.机器人视觉机器人研究的核心就是:导航定位、路径规划、避障、多传感器融合。定位技术有几种,不关心,只关心视觉的。视觉技术用到“眼睛”可以分为:单目,双目,多目、RGB-D,后三种可以使图像有深度
2019-06-08 08:30:00
labview 视觉机器人抓取工件 CCD相机的二维坐标系的建立?希望分享,谢谢
2017-08-18 20:53:37
如题。机器人的这个备份系统问题。想求大神讲解一下哈。
2015-01-16 10:38:44
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
视觉技术是近几十年来发展的一门新兴技术。机器视觉可以代替人类的视觉从事检验、目标跟踪、机器人导向等方面的工作,特别是在那些需要重复、迅速的从图象中获取精确信息的场合。
2019-09-04 08:00:27
安全,对一些特殊工种,如喷涂,铸造等通过劳动法强制采用工业机器人来代替,这样可以大大增加工业机器人的需求数量。视觉机器人我国的机器人产业化必须由市场来拉动,机器人作为高新技术,它的发展与社会的生产、经济状况
2016-09-08 10:34:05
知识体系分解细化,对ABB工业机器人知识要点做了针对性解析,并配以详细的操作步骤。全书以工业机器人组成为切入点,系统地介绍了ABB工业机器人的主要技术参数、手动操纵方法、坐标系定义流程、I/O配置过程
2018-10-29 17:03:22
ADS1115在配置和转换时的具体操作步骤,每一步的寄存器配置是怎样的???希望能给出配置和读取数据的模块函数
2025-02-12 08:25:54
如果您的 iPhone 或 iPad 的睡眠/唤醒按钮坏了——顶部按钮或侧边按钮取决于设备——您仍然可以使用名为AssistiveTouch 的辅助功能锁定屏幕(甚至重新启动)。那该如何具体操作呢
2021-12-31 07:04:17
NI VISION 与机器人做引导怎么样实现手眼标定好像没有像其他视觉类似的函数...哪位大侠可以指点一二谢谢了
2018-04-09 15:35:20
目录一、测试平台二、过程1.先明白OTA的原理2.搞清楚OTA的原理后,再看rt-thread的OTA具体操作过程,先生成通用的Bootloader3.通用bootloader弄完后,再把OTA
2022-02-14 06:36:37
ZN-RAI02工业机器人与视觉实训平台是什么?ZN-RAI02工业机器人与视觉实训平台有哪些技术性能?ZN-RAI02工业机器人与视觉实训平台的结构是由哪些部分组成的?ZN-RAI02工业机器人与视觉实训平台有哪些配套软件?
2021-08-09 06:22:03
作开发基于机器视觉的工业机器人抓取工作站,因抓取物品为乱序堆叠的毛坯零件,且零件不唯一,所以需要一定的深度学习,而出于成本考虑,选用的工控机需求工作稳而不执行大量视觉计算,故考虑单独加置视觉处理单元,正好
2019-09-18 14:18:14
申请理由:现在正在参与视觉机器人的项目,想了解更多的关于机器人的产品与知识。项目描述:水果采摘机器人:机器人寻找视野中的水果,并移动到相应的位置,由机械臂进行采摘水果并放到指定的位置。
2015-10-29 11:00:03
:
一、机器人视觉:从理论到实践
第7章详细介绍了ROS2在机器视觉领域的应用,涵盖了相机标定、OpenCV集成、视觉巡线、二维码识别以及深度学习目标检测等内容。通过学习,我认识到:
相机标定的重要性
2025-05-03 19:41:47
正合作开发基于机器视觉的工业机器人抓取工作站,因抓取物品为乱序堆叠的毛坯零件,且零件不唯一,所以需要一定的深度学习,而出于成本考虑,选用的工控机需求工作稳而不执行大量视觉计算,故考虑单独加置AI加速器
2019-09-18 19:24:11
拿到一个题目,视觉采摘机器人。目前对视觉处理方面毫无头绪,由于条件有限,只做出概念实物。机器人只有达到识别该果蔬并采摘下来的效果。有没有大神提供一下思路。
2018-04-10 09:22:27
ZN-ZN605型 六轴机器人、自动上料模块、视觉检测模块、立体仓库模块、模拟焊接模块、码垛及轨迹示教模块、总控系统模块。 ZNH-IRW04型 工业机器人操作调整工技能鉴定平台要求参赛选手根据竞赛任务
2021-07-01 13:00:49
机械手之间有防护墙隔开,操作者可通过观察窗或闭路电视对从机械手操作机进行有效的监视,主从机械手系统的出现为机器人的产生为近代机器人的设计与制造作了铺垫。1954年美国戴沃尔最早提出了工业机器人的概念,并
2015-01-19 10:58:38
CH340是什么?有何特点?使用CH340来下载烧录或调试的具体操作步骤有哪些?
2022-02-24 07:05:12
大家有知道广州数控的机器人的主控操作系统是基于什么做的吗?还有珞石机器人?或者我去哪可以查到呢?想做个简单的调查~谢谢
2017-12-25 20:57:12
多。。。如以下产生以下报警现象。 二种情况就是人为操作产生的现象,维护没有按照一定标准方法进行,误操作使的零点数据丢失,比如断电后先做了个培训然后过来换电池。就会发生此类丢失现象。包括断电...
2021-09-07 08:58:47
,节约原材料消耗以及降低生产成本,有着十分重要的意义,正在日益改变着人类的生产和生活方式。工业机器人已经广泛应用于汽车及汽车零部件制造业、机械加工行业、电子电气行业、橡胶及塑料工业、食品工业、物流等诸多
2015-09-02 14:03:18
制造出像人一样具有智能的能替代人类劳动的机器人,一直是人类的梦想,人类获取的信息80%以上是通过视觉。因此,在智能机器人的研究中,具有视觉的机器人的研究也就成了第一位的。对机器人视觉伺服系统的研究是机器人领域中的重要内容之一,其研究成果可应用在机器人自动避障、轨迹跟踪和运动目标跟踪等问题中。
2019-09-27 08:07:35
组成(台皮带线输送模组、视觉定位及检测模组、码垛模组、装配模组、打螺丝模组、取料模组、机器人TCP标定模组、PC模组等)。通过对该工业机器人视觉装配实训平台的6关节机器人和平面关节机器人、多功能夹具
2021-07-01 12:05:38
工业机器人控制器功能多任务功能一台机器人可进行多个任务的操作;
2019-09-12 09:10:22
我用HFSS画了一个谐振器然后仿真得到S参数曲线,另外还知道这个谐振器的等效电路,请问怎么具体操作ADS可以得到其中的L、C大小呢
2021-06-24 06:07:29
教你如何从零做一个智能象棋机器人?怎样去设计一个基于机器视觉与dobot的象棋机器人呢?
2021-12-23 06:22:11
想设计一个既可以无源输入又可以24V有源输入的电路,具体操作怎么弄,有大神帮忙解惑吗
2025-05-04 01:03:32
在物流搬运行业,拳头机器人由于其独特的并联结构,常用于高速整列、装箱等场合。其中,拳头机器人的视觉线跟踪技术正得到广泛的应用,如下图所示:
2020-08-06 06:30:31
机器人视觉传感器详解一种新型的工业机器人已经走到行业的前沿, 他们的主要特点是能够安全地协助人类工作。在网上有很多人谈论它们,但你认真了解过它吗?
2020-08-14 07:24:17
智能监控机器人是近年来机器人应用工程中一项前沿性的题目,智能化探测小车是智能行走机器人的一种。智能监控机器小车就是针对上述情况,在参考了目前大多数智能机器人的基础上,以降低成本为原则设计的。小车具备
2019-10-14 07:37:52
随着计算机科学和自动控制技术的发展,越来越多的不同种类的智能机器人出现在工厂、生活当中,机器人视觉系统作为智能机器人系统中一个重要的子系统,也越来越受到人们的重视。它涉及了图像处理、模式识别和视觉
2020-04-07 07:27:24
山东康道资讯:桁架机器人操作注意守则!好的桁架机器人守则能让性能不断提高(高速度、高精度、高可靠性、便于操作和维修),机械手控制器系统也跟着向基于PC机的开放型控制器方向发展,便于标准化、网络化
2018-09-27 15:54:21
ATmega168看门狗复位的具体操作过程
2020-11-18 07:17:17
求一款适合自己的操作系统,主要用于机器人的控制方面的 ,哪位高手推荐一下 谢谢
2019-06-12 03:47:03
放料位的位置也会保持不变。 如图1所示,放置一片模板电芯到CCD下面,视觉抓边取顶边与左边及其交点。以交点做为模板的特征点,左边做为模板的方向边。 让机器人示教一个抓取电芯的点,如图1所示的这个示
2021-04-07 12:06:47
华天电力专业生产直流高压发生器,接下来为大家分享直流高压发生器的具体操作步骤是什么?如果电容负载测试,必须连接到上电流电阻。一、仪器使用前应检查其完整性,不应损坏连接电缆和短路,设备无断裂和其他损坏
2019-01-28 11:53:59
看门狗定时器(WatchDog Timer)在出现程序跑飞卡死的时候用来强制复位处理器或控制器。具体操作是:通常程序正常循环会在一定周期内进行“喂狗”,若程序执行一个错误代码或者程序卡死,将不
2021-11-10 07:15:21
上一篇文章中我们为大家介绍了嵌入式设备中支持国密算法的几种方法。本篇我们详细的介绍一下第一种方法:移植Miracl库的具体操作步骤。第一步 获取源码MIRACL密码库是开源软件,可以直接到官网下
2021-12-21 06:57:36
TAS5805M:低频、中频、高频、三个喇叭分频怎么具体操作?
2024-10-12 07:14:35
UART内核在接收数据时有哪些具体操作?
2025-12-26 07:41:39
UART内核在接收数据时有哪些具体操作?UART内核在接收数据完成后会进行哪些处理?
2025-12-25 07:15:56
功能没有问题, Touch搜到light,ON/OFF控制 light,问题:1、在ZLLClassical Join 的入网方式是怎样的,我该如何具体操作?以上问题请Ti工程师或员工能在百忙中给予解答,Thanks.附上 抓包图1、Bridge建立网络后如图:2、Light按S1 出现如下图:
2018-05-22 05:44:03
扫地机器人一般是用到什么实时操作系统啊
2020-04-10 04:36:00
菜鸟想要学习ROS机器人操作系统,但是没能找到系统的资料,请问有哪位大神研究过,可以分享一些资料吗?跪谢了!!!!!!!!!
2019-02-19 23:14:23
公司的酷卡机器人有一个调零的程序,就是把机器人移动靠近到防护围栏上的一个传感器,直到触发传感器动作。在机器人发生碰撞后就提示要求调零,但一直没搞明白这样做目的是什么,希望知道的朋友指点一下。
2015-01-14 14:35:30
基于DM642的机器人双目视觉系统设计
2021-04-02 07:20:41
光学标定板应用领域宏诚光学玻璃系列标定板和陶瓷系列标定板是专为高校实验、研究单位项目研发和机器视觉集成商产品标定等等客户群体使用的常用标定工具,能够方便获得相机的标定数据。标定板作用:为校正镜头畸变
2022-09-20 08:14:32
Protel在线教程:如何在PCB中给PCB补泪滴的具体操作
仔细看这里,我们将学会做给PCB补泪滴的具体操作
2010-04-22 09:02:538172 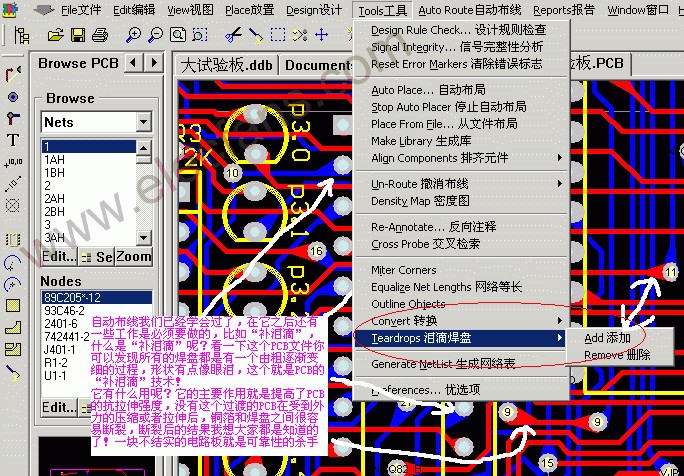
Protel在线教程:在PCB中给PCB做覆铜的具体操作
2010-04-22 09:03:374189 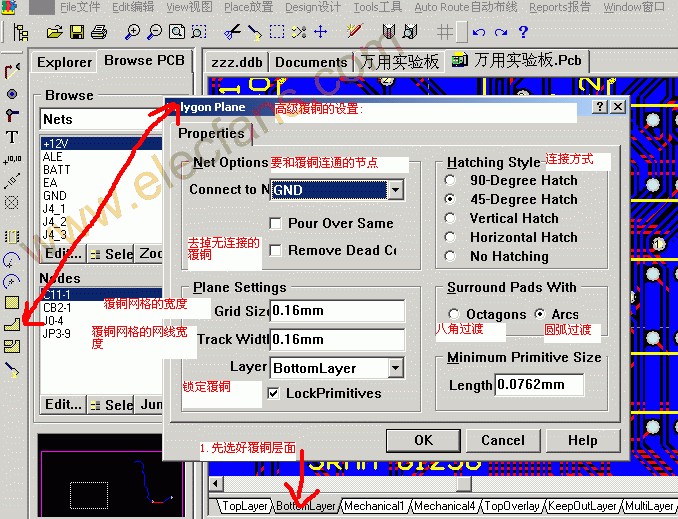
一、哪些情况需要标定零点 零点是机器人坐标系的基准,没有零点,机器人就没有办法判断自身的位置。 机器人在如下情况下要重新标定零点: 1.进行更换电机、机械系统零部件之后。 2.超越机械极限位置,如
2017-09-19 18:31:08 15
15 机器人装配操作是机器人研究与应用的一个重要领域。与机器人焊接。喷涂等作业不同,机器人的装种约束运动类操作,因此在规划和控制时必须考虑接触约束和各种不确定性因素的影响。本文对机器人装配操作的规划和控制策略进行了详细的综述,并对一些典型的装配操作任务进行了分析。文末提出了需要进一步深入研究的一些问题。
2017-10-16 09:53:0315 使用LabVIEW和用于DENSO的ImagingLab Robotics库,机器视觉和机器人系统可以集成在一个应用程序中。本文介绍了使用相同坐标系统在机器视觉系统和机器人系统之间进行标定的方法
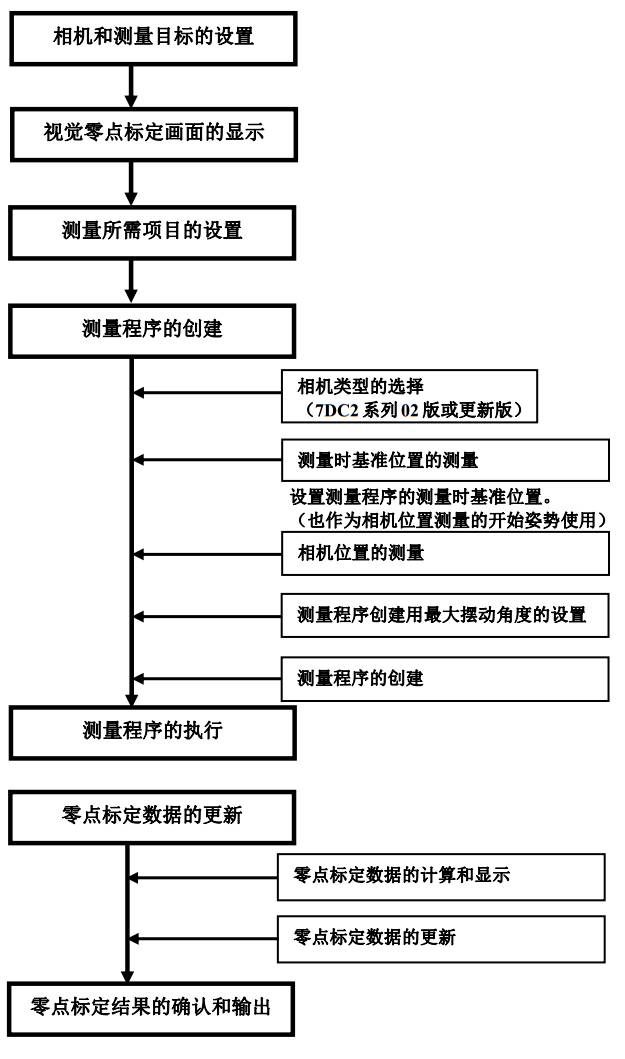
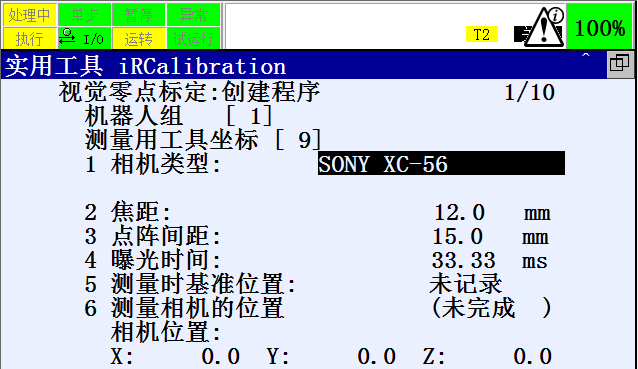
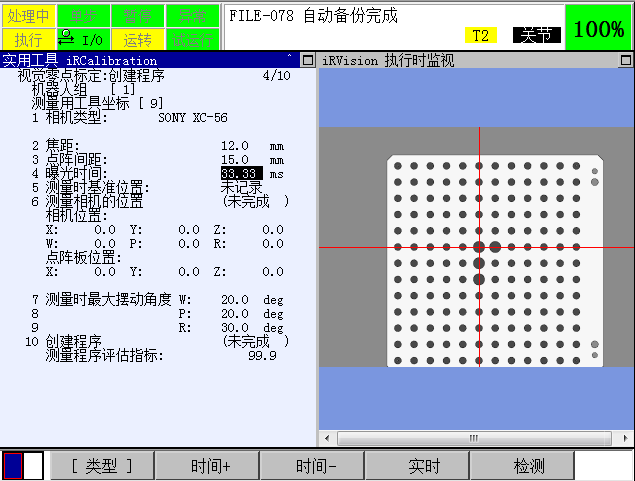
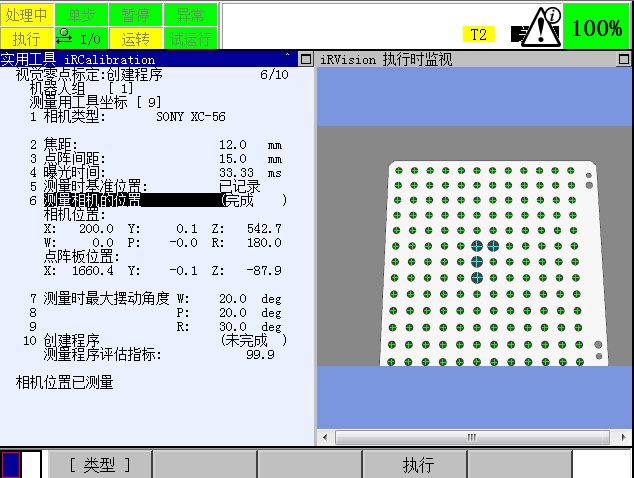
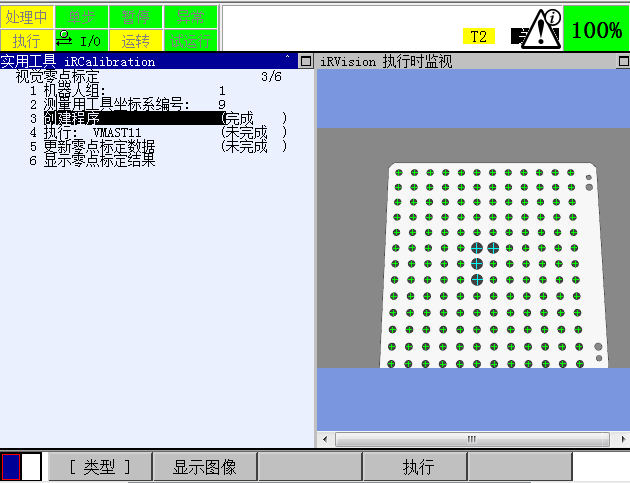
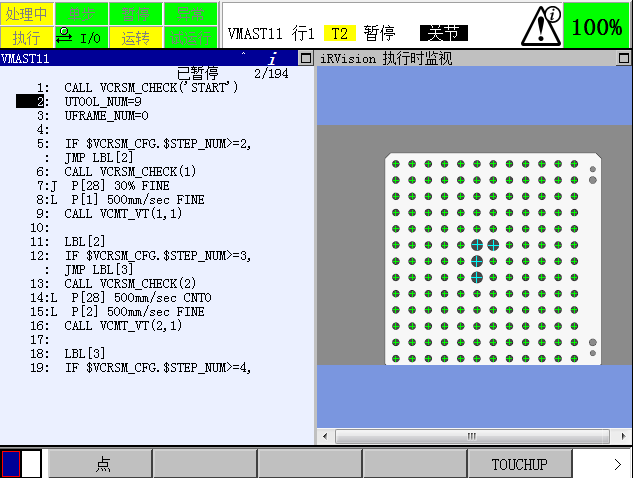
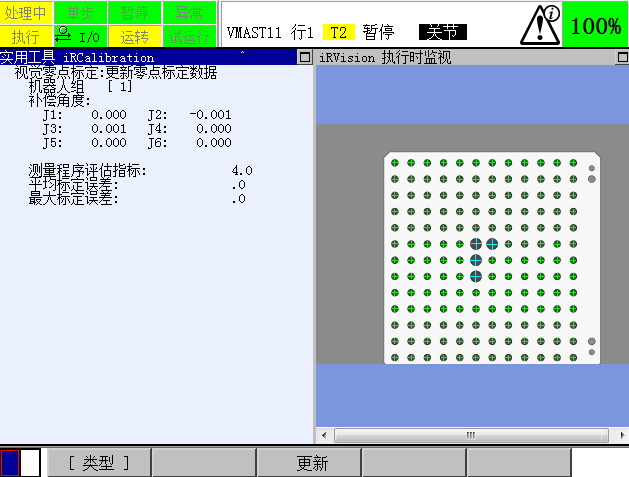
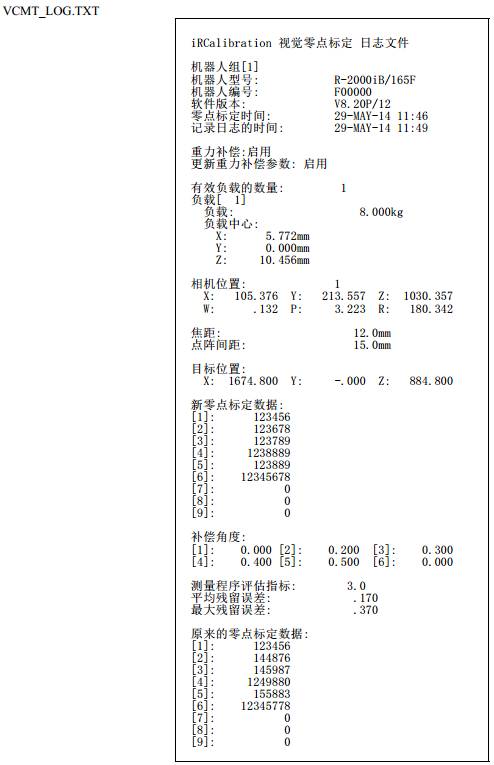
2017-11-17 17:03:2514011 本章介绍当机器人部件(包括马达和减速机)进行更换后,通过视觉来恢复机器人的零点位置信息的相关方法。
2019-08-28 18:32:152216 
零点标定可通过确定轴的机械零点的方式进行。在此过程中轴将一直运动,直至达到机械零点为止。这种情况出现在探针到达测量槽最深点时。因此,每根轴都配有一个零点标定套筒和一个零点标定标记。
2020-06-12 15:15:154505 零点标定可通过确定轴的机械零点的方式进行。在此过程中轴将一直运动,直至达到机械零点为止。这种情况出现在探针到达测量槽最深点时。因此,每根轴都配有一个零点标定套筒和一个零点标定标记。
2020-06-30 16:52:044133 
悬挂式机器人喷涂系统可以实现对天车系统和机器人喷涂系统的单独进行操作。在现场天车可以通过操作屏TP700进行操作,分别对X、Y和Z轴伺服电机进行上电、零点校准、绝对定位等。
2021-01-15 15:51:153132 如果正在运行的机器人遭遇突然停电,可能会造成机器人原点丢失,其他基本没有什么影响。 什么是零点 机器人零点是机器人操作模型的初始位置,每一台机器人在出厂时就已经设置好了零点。当零点不正确时,机器人
2021-02-12 11:51:0011039 处理以及具体操作步骤。 如何确保ROI感兴趣的区域,在我们选定的测量范围之内呢?大致有4个以下步骤: 1)基于标准图像目标的特征,确定参考坐标系; 2)在标准图像中设置检测ROI; 3)根据图像目标的特征,在新采集的图像中设置新的
2021-01-27 09:39:0311695 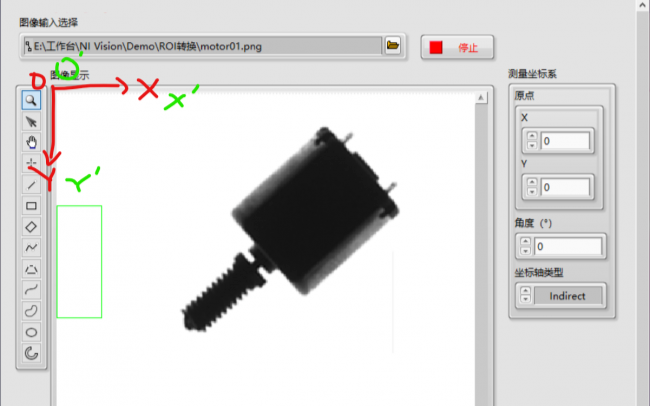
相机固定不动, 上往下看引导机器人移动 机器人与视觉标定理论详解 1.相机非线性校正使用标定板做非线性校正2.相机与机器人做9点标定可以使用机器人扎9个点,或者机器人抓住工件摆放9个位置,得到9个
2021-05-27 14:15:534610 
焊接机器人的操作流程是怎样的?焊接机器人是实际焊接生产应用中可以提高焊接效率,稳定焊接质量,代替人工在恶劣的环境中进行工作,焊接机器人能够实现稳定焊接,需要熟练且稳定的操作流程,青岛赛邦带您了解操作流程。
2021-09-10 14:11:4815382 焊接机器人焊接铝材需要哪些操作流程?铝材在焊接过程中需要进行焊前清理、焊接过程稳定操作以及焊后完善这一流程,按照合理的操作流程能够提高焊接机器人的作用,小编带您了解焊接铝材的操作流程。
2022-03-03 09:56:141935 主要写:
1、利用 Protel 99SE 绘制电路图的流程;
2、ERC 检查具体操作过程;
3、生成网络表具体操作过程 、生成网络表具体操作过程;
4
2022-04-12 14:17:140 所有机器人的零点标定位置都是相似的,但不尽相同。精确位置在同一机器人型号的不同机器人之间也会有所不同。
2022-08-15 10:13:592679 在焊接行业中,激光跟踪焊接机器人是近几年比较流行的焊接方法,激光跟踪焊接机器人在实际焊接应用中可以提升焊接效率,稳定焊接质量,在焊接中能够提升用户的生产效益,正确的操作流程可以稳定焊接质量,小编带您了解激光跟踪焊接机器人的操作流程。
2022-08-15 17:05:422675 
可燃气体报警器的传感器检测原理主要包括催化燃烧型、红外吸收型、热导型,在运行一段时间后,其灵敏度会逐渐降低甚至损坏,因此需要及时进行校准。 主要校准范围是可燃气体报警器的零点和示值,具体操作如下
2022-09-14 11:47:597291 Allegro有一个非常好用的打过孔功能,可以在信号线旁边快速打孔,提升了工作效率,避免手动打过孔的烦恼,具体操作步骤如下(本文使用的是Allegro17.4,其他低阶版本使用方法大致相同):点击
2022-10-17 09:38:388660 完整的零点标定过程包括为每一个轴标定零点。KUKAC4机器人通过技术辅助工具 EMD,可为任何一根在 机械零点位置的轴指定一个基准值 (例如:0°)。
2022-12-12 11:11:1612008 未进行零点复归测试,参考点开关被触发至少 5 分钟。参考点开关安装在错误的位置上或被移动。
2022-12-26 11:33:252238 常见的机器人视觉伺服中要实现像素坐标与实际坐标的转换,首先就要进行标定,对于实现视觉伺服控制,这里的标定不仅包括摄像机标定,也包括机器人系统的手眼标定。 以常见的焊接机器人系统为例,有两种构型。
2023-02-06 15:24:211955 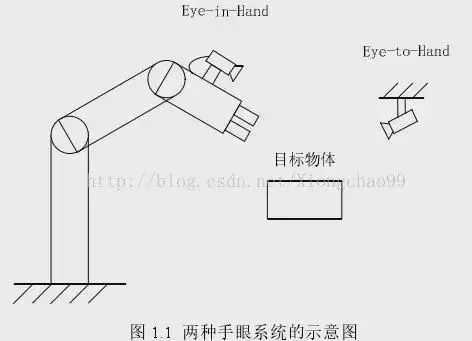
线路板的电镀工艺,大约可以分类:酸性光亮铜电镀、电镀镍/金、电镀锡,文章介绍的是关于在线路板加工过程是,电镀工艺的技术以及工艺流程,以及具体操作方法.
2023-02-07 15:27:519902 弧焊机器人操作流程是什么?弧焊机器人操作流程一共11个步骤,分别是检查点检设备、工装等,并做好相应的记录;接通机器人控制箱焊机等电源;检查机器人是否启动等。
2023-03-17 10:32:422458 焊接机器人的操作流程和操作注意事项是什么?焊接机器人的操作流程:需要对焊接对焊接机器人进行设置、安装工件装夹、启动开机、启动预热功能、执行和检查焊接质量。需要注意操作人员的安全等。
2023-03-29 08:59:013716 
品致差分探头是一种专业用于电路测量的精密测试设备,其独特的差分设计能够有效消除噪声干扰,提高信号测量的精確度。下面PRBTEK将为大家介绍品致差分探头的具体操作方法。
2023-04-03 11:18:406041 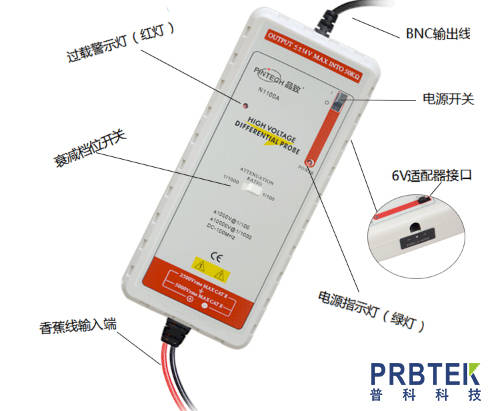
完整的零点标定过程包括为每一个轴标定零点。KUKAC4机器人通过技术辅助工具 EMD,可为任何一根在 机械零点位置的轴指定一个基准值 (例如:0°)。因为这样就可以使轴的机械位置和电气位置保持一致
2023-04-14 16:06:541918 正确使用蔡司三坐标测量仪可以延长仪器的使用寿命,下面看看三本精密仪器的三坐标测量仪的具体操作步骤:一、规划检测方案首先是要查看零件图纸,了解测量的要求和方法,规划检测方案或调出检测程序。二、注意操作
2023-06-08 15:24:486079 
焊接机器人是一种将焊接程序预设到机器人控制系统中,由机器人自动完成焊接作业的工业机器人。它不仅提高了生产效率,降低了生产成本,而且还能有效地保障焊缝的质量和稳定性。下面工业机器人厂家无锡金红鹰就来详细介绍一下焊接机器人的操作流程和注意事项。
2023-07-18 16:29:473307 气保焊(或称气体保护焊)机器人是一种自动化焊接设备,可以用于焊接各种金属材料。气保焊机器人焊接怎么操作呢?以无锡金红鹰一米五气保焊机器人的操作为例,下面具体操作步骤:
2023-07-29 08:22:081649 
介绍焊接机器人示教操作的基本流程,以便更好地理解和应用这一关键步骤。 第一步:准备工作 在开始示教操作之前,需要做一些准备工作。首先,确认焊接工艺和要焊接的零件,包括焊接电流、电压、焊接材料等参数。然后,确
2023-08-02 17:56:532241 
常见的机器人视觉伺服中要实现像素坐标与实际坐标的转换,首先就要进行标定,对于实现视觉伺服控制,这里的标定不仅包括摄像机标定,也包括机器人系统的手眼标定。
2023-08-04 11:48:471329 
当机器人校正的时候,各个轴就可以运动到一个特定的机械位置,也就时所谓的机械零点。一旦机器人运动到机械零点,各个轴上的绝对编码盘的值就被保存下来了。
2023-09-04 16:57:101720 
什么是零点漂移?如何抑制零点漂移?零点漂移怎么解决? 零点漂移是指在没有外力作用的情况下,传感器输出值的基准值(称为零点)发生漂移。例如,在温度传感器中,当温度变化很小或较为稳定时,如果传感器输出
2023-09-19 17:33:5723682 零点标定可通过确定轴的机械零点的方式进行。在此过程中轴将一直运动,直至达到机械零点为止。这种情况出现在探针到达测量槽最深点时。因此,每根轴都配有一个零点标定套筒和一个零点标定标记。
2023-09-23 09:20:161523 
在机器人零点校正时,轴被移到一个定义的机械位置,即所谓机械零位。如果机器人在这机械零位, 那么每个轴的绝对传感器值被存储。零点标定目的是使机器人各轴的轴角度与连接在各轴电机上的绝对值编码器的脉冲计数值对应起来的操作。具体而言,是为了求取零度姿势的脉冲计数值的操作。
2023-11-19 16:19:415042 
威纶通触摸屏远程上下载程序需要什么工具?具体操作步骤是什么?
2024-01-17 15:34:008567 
灵活的操作性和较高的工作效率,今天跟随创想智控焊缝跟踪小编一起了解六轴焊接机器人的操作流程。 一、机器人准备 开机自检:启动机器人控制系统,进行自检程序,确保系统正常运行,无故障提示。 加载焊接程序:根据焊接工件的形
2024-04-29 09:56:371662 
定位器气密性检测仪是用于检测定位器密封性能的关键设备,在工业生产中具有广泛的应用。为确保检测结果的准确性和仪器的长期稳定运行,遵循正确的操作流程至关重要。以下是定位器气密性检测仪的具体操作步骤:一
2025-03-05 11:52:07702 
的浸饱和处理是使用渗压计前不可或缺的步骤。以下详细介绍具体操作流程及注意事项,确保透水板达到理想饱和状态。操作步骤拆卸透水板部件关闭渗压计电源,小心将透水板部件从渗
2025-04-01 12:19:12565 
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论