Linux是一个多用户的操作系统。多用户意味着每个用户登录系统后,都有自己专用的运行环境。而这个环境是由一组变量所定义,这组变量被称为环境变量。用户可以对自己的环境变量进行修改以达到对环境的要求。
2022-11-14 12:01:17 278
278 Linux 是一个多用户的操作系统。多用户意味着每个用户登录系统后,都有自己专用的运行环境。而这个环境是由一组变量所定义, 这组变量被称为环境变量。用户可以对自己的环境变量进行修改以达到对环境的要求。
2022-11-21 11:43:56320 在ADS中,如果要扫描一个参数,通常是定义一个变量,用这个变量给元件参数赋值,再通过控件扫描这个变量。
2023-07-05 11:31:375697 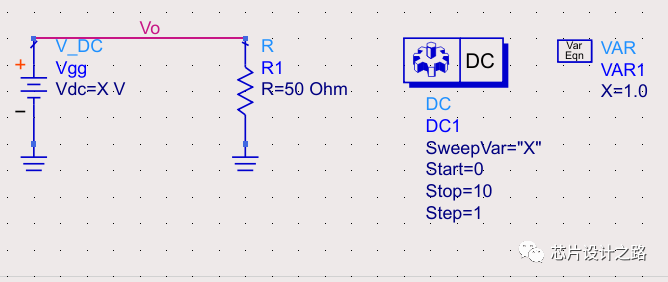
KUKA库卡机器人伺服驱动器(Servo Drive)是KUKA运动控制的重要组成部分,被普遍应用于工业机器人及数控加工中心等自动化设备中。是用来控制伺服电机的一种控制器,其作用类似于变频器作用于
2020-09-08 16:30:28
KUKA库卡C4机器人驱动器故障报警维修库卡机器人维修内容包括库卡机器人示教器维修,KUKA伺服驱动模块维修,库卡机器人伺服电机维修,KUKA机械手PC工业电脑维修,库卡机器人电路板维修,库卡机
2021-09-17 07:09:52
1 开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在
2019-07-15 07:48:36
这个是KUKA重型机器人处理和测量混凝土轨枕的视频。处理得相当精细。真心值得爱好机器者和爱国者研究研究。
2015-02-03 15:18:31
大家好,我正在执行需要在8个状态之间切换的S参数模拟。我有8个变量来控制系统所处的状态,即如果var1 = 1,则系统处于状态1.对于每个状态,我需要执行频率扫描。目前,我通过手动切换8个变量中
2019-07-31 14:17:10
APM-AMP-APO
2023-03-28 14:49:12
CT201003APO - Chip Resistors - Tin / Gold Terminations Available - American Accurate Components, Inc.
2022-11-04 17:22:44
CTG051003APO - Chip Resistors - Tin / Gold Terminations Available - American Accurate Components, Inc.
2022-11-04 17:22:44
CTG111003APO - Chip Resistors - Tin / Gold Terminations Available - American Accurate Components, Inc.
2022-11-04 17:22:44
的平衡。接下来的内容是关于目前在ComputeColStats中用的一些近似算法。二,收集的内容目前针对列主要会收集以下统计信息:cntRows : 列中总数据个数,包括nulll值avgColLen
2018-04-26 15:42:54
Keil C51中可使用以下方法: 这两种方式效果是完全相同的,但在目标代码中变量t仅占用1位(即1/8字节),而且因为51内核单片机指令系统中有位处理指令,生成的目标代码占用内存少、运行
2011-11-30 17:21:47
VI之间传递资料的一种变量。 首先我们看到下面的程序,一个是程序A,另一个是程序B,如果我不在意资料的完整性,而只是想要将程序A中所产生的资料,同样的在程序B中显示出来,像这样的情况就适合使用全域变量
2014-12-23 10:42:26
目(Project File)才能够建立共享变量,且共享变量建立完后会放置在Library档中,或许你会好奇共享变量和全域变量有什么不同,其实他们的功能十分接近,都可以在不同的VI间进行资料的传递,不过共享
2014-12-23 11:00:53
标贴打印机打印标贴,有几个变量,在数据库中创建变量参数,引用标签模板,只要修改模板中变量即可打印不同标签。在LabVIEW中如何如何编程修改.lbl标签文件模板中指定的几个变量?用文件I/O里的函数吗?我怎么没找到
2013-01-11 15:26:58
是局部变量,这些变量保证了shell的正常运行。下面就介绍下shell中的特殊变量。Shell特殊变量Shell 中的特殊变量主要有以下几个:$0, $#, $*, $@, $?, $下面会分别介绍下
2018-08-28 14:14:52
环境变量一般是指操作系统中指定操作系统运行环境的一些参数。它相当于一个指针,想要查看变量的值,需要加上“$”。
2019-07-25 07:59:59
MCU程序中怎么防止局部变量在函数运行完不丢失数据
2023-10-10 06:04:11
,全局变量用于将其值返回给系统的两个选定参数。•因此,无需从目录中读取或重新计算任何参数。参数耦合的特殊示例•关闭源代码编辑器后,将显示已定义的全局变量“光栅高度”(“ GratingHeight
2020-04-17 11:43:32
。用户可以选择均匀分布、正态分布和截止正态分布,甚至可以将这些不同的分布函数包含在同一参数运行中,为不同参数进行容差分析。参数运行的用法 使用VirtualLab Fusion中的参数运行,人们可以灵活地指定所选参数的变化范围,以便进行系统分析,如容差分析。图片在下方
2021-10-22 09:16:02
指针与变量注:keil中单片机C编程若指针没有指向提前声明的变量,会产生混乱eg:情景一:情景二:Type *p,*q;Type *p,*q,pp,qq;给指针p赋值;p=&pp;给指针q
2021-07-14 08:35:42
使用过codewarrior IDE的网友都知道,Codewarrior有一个很好的特性就是变量值可以直接在程序运行中查看,而且无需停止。但是目前免费的KDS直接点击运行,在expressions
2016-06-23 14:10:08
editor,导入。比如把config.txt中2的example.txt干掉改成我们合并的txt文件即可。注意下,REW导出的文件可以直接被APO使用,但是需要增加左右属性。然后见证奇迹的时候就会
2021-05-07 11:33:40
教大家一个如何在头文件中定义全局变量的方法 通常情况下,都是在C文件中定义全局变量,在头文件中声明,但是,如果我们定义的全局变量需要被很多的C文件使用的话,那么将全局变量定义在头文件里面会方便
2018-07-09 09:25:50
( SpaTIal Fading CorrelaTIon,SFC)特征,重建了MIMO多输入多输出系统的信道参数模型。首先,研究小角度扩展功率谱PDF在Sinc分布、高斯分布以及拉普拉斯分布下的SFC闭合表达式,以
2023-09-19 07:53:10
1、proteus仿真中对于芯片运行中自定义变量的随时查看变量变化不好掌握,本人暂时不知道软件仿真中有没有这个查看变量的功能(貌似只有帧暂停查看查看芯片寄存器、存储器的功能)方法:程序内将需要查看
2021-12-01 07:51:36
不是持续长久的,当程序使用完后,系统会自动删除回收在嵌入式系统中,为了追求项目的可靠性,因此会较常使用静态变量。静态变量的基本划分静态变量可以划分为全局静态变量(global static variable)和局部静态变量(local static variable)。//注:该部分划分仅为个
2021-12-15 07:08:36
库卡KUKA机器人四种启动方式1)自动运行说明 库卡机器人处于自动运行时,先要在手动状态时候选择需要运行的程序,然后通过钥匙开关切换机器人到自动运行状态,给机器人上电,然后启动机器人运行程序,让
2020-09-04 15:45:41
层之间的互感。我意识到我可以运行10个模拟,并且对于每个模拟,我可以从S参数获得Z21或Z12,但是运行多个模拟需要太长时间。我使用过Sonnet EM,我可以在堆栈中添加一个名为H的变量,并改变这些
2019-01-10 16:01:25
我看NI有Robotics Toolkit for KUKA KR C2的附加包,这个怎么用啊?如何和kuka机器人建立通讯啊?是Tcp接口吗?
2023-10-21 20:59:28
磨煤机相关参数及数据**磨煤机介绍****磨煤机相关监测参数****磨煤机典型故障****某电厂磨煤机实际运行数据**新的改变功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接
2021-06-30 07:39:06
我们知道在高频电路中,我们不能用一个确定的数值来代表这个元器件的特性,因为随着频率的变化其的特性也在发生变化。也不能让系统只工作在一个频率上面。此时直流电路中的欧姆定律概念已经失效,现在需要引入
2019-06-28 07:24:14
计算机控制系统中的四种电源介绍在一个计算机控制系统中,供电电源系统的性能对保证整个系统安全、可靠、稳定地运行至关重要。1、交流电源系统交流电源通常和电网相连接,然而,工业现场的电网所接负载极其复杂
2021-11-15 07:48:32
状态随着程序运行的时间因素而改变,因此具有一定的危险性。操作系统、LabVIEW版本和系统中其他软件的改变均会引起竞争状态。如改动了VI的时间要素(例如,更新操作系统或LabVIEW版本),请检查
2018-01-30 10:58:40
系统已经把命令的搜索路径提前设置好了。常用变量 PATH 决定了要去哪个路径下去寻找我们的程序或者命令, 在以后的开发过程中, 我们要经常修改这个变量。2 修改环境变量修改环境变量的方法有几种,这里给
2021-11-30 12:27:36
个路径下输入, 都是可以执行成功的, 因为系统已经把命令的搜索路径提前设置好了。常用变量 PATH 决定了要去哪个路径下去寻找我们的程序或者命令,在以后的开发过程中, 我们要经常修改这个变量。5.11.2
2022-04-28 16:07:47
非线性与多变量系统相关辨识主要研究单变量线性系统以及非线性系统Wiener模型和Hammerstein模型的线性子系统的脉冲响应函数的辨识,差分模型的全结构与参数的辨识,以及线性随
2009-01-14 22:32:02 0
0 多变量系统能控、能观分析2.0 实验设备PC计算机1台(要求P4-1.8G以上),MATLAB6.X软件1套。2.1 实验目的①学习多变量系统状态能控性分析的定义及判别方法;②学习
2009-05-15 00:52:270 本文提出了在嵌入式系统运行参数远程修改中应用UDP 协议的技术,详细介绍了系统相关通信协议及其实现过程,并给出了相应的代码。最后
2009-09-15 08:22:2712 【摘 要】 对单片机控制系统运行参数有效性的判别方法进行了介绍,并对系统运行参数如何实现保存进行了探讨。同时给出了存储过程中的数据校验和运行参数的取值范围检验
2009-05-14 20:33:45718 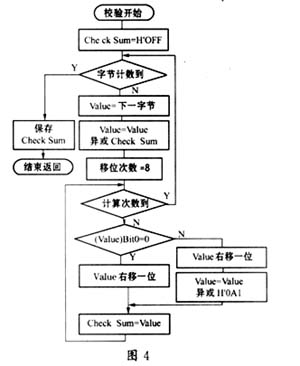
小电动机的两个近似公式这里介绍小型三相异步电动机的恋歌近似计算的经验公式,可供读者在选用小型电动机的功率,以及选择动力线路中的导线截面、
2009-08-14 15:35:35488 用5个折点把S形曲线近似为折线的二极管折线近似电路
电路的功能
2010-05-11 15:41:521549 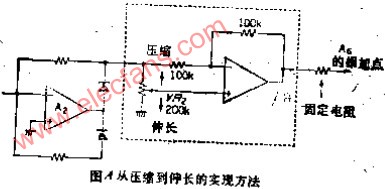
基于偏差补偿辅助变量法的舵机参数辨识...
2016-01-06 11:40:100 KUKA机器人工具坐标系的建立执行方法:将待检测的工具安装在法兰上,找出一个合适的参考点 它可以是固定在工作空间的某一参考芯。
2017-10-16 15:15:348 数据,包括日志数据、监控数据以及任务图数据。开发者可以基于运行数据对系统进行参数调优。然而该系统所涉及的参数种类繁多、影响多样且难以评估,若对系统了解不足,进行参数调优存在较大的困难。提出运行数据历史库的概念,历史库
2017-12-06 09:16:500 漆包线规格参数及近似英规线号,varnished wire
关键字:漆包线规格对照表
漆包线规格参数及近似英规线号varnished
2018-09-20 18:28:082318 KUKA 为各种复杂的焊接任务都准备了正确的软件:因此在焊接前就能用 KUKA.TouchSense 和 KUKA.SeamTech Finding 精确地确定工件或焊缝的位置。
2019-05-30 17:48:023549 变量声明需要关键词 DECL,对四种简单数据类型关键词 DECL 可省略[1.整数 (INT) 2.实数 (REAL) 3.布尔数 (BOOL)4.单个字符 (CHAR)].
2020-05-10 10:27:1711443 变量$TORQMON包含程序模式下轴转矩的当前公差范围。该公差范围是使用文件…STEU Mada $ custom.dat中的变量$TORQMON_DEF定义的。
2020-06-11 16:25:117228 该变量最多可用于编程6个函数发生器。函数发生器仅对CP运动有效。仅评估主运行变量。
可以在机器人程序中相对于提前运行修改功能参数。
2020-07-03 09:32:332869 
必须正确设置本节中的参数,才能使Interbus连接正常运行。插图中指定的值对应于默认设置,该设置在系统出厂时由KUKA预装时有效。一些参数控制了底层控制计算机的硬件接口的保留,而其他系统组件可能不会同时使用这些保留。
2020-08-07 17:12:552267 
对于旧的8.2X系统使用的外部轴插件是SynchroMove 对于最新8.3X系统 要分两种: WorkVisualAddOnVKR: 用于气伺服焊钳和其他软件控制电伺服焊钳或其他伺服设备(由机器人
2020-10-27 17:56:022441 
本文档的主要内容详细介绍的是库卡(KUKA)机器人的操作手册免费下载。
2021-03-02 08:00:0023 $ err 具有有关当前程序信息的结构 该变量可用于评估相对于提前运行的当前执行程序。例如,该变量可用于评估程序中的错误,以便能够使用适当的故障服务功能对其进行响应。 该变量具有写保护,只能被读取
2021-04-12 11:13:471417 /输出参数VAR_IN_OUT ... END_VAR 静态变量 静态变量是本地变量,块运行时其值被保留。用来保存功能块的值,并包含在相应实例数据块中。 句法
2021-08-25 18:07:177800 KUKA系统软件(KSS) 试行版4.1及库卡编程词汇手册
2021-11-10 17:06:330 KUKA机器人PN系统网络故障的判断方法说明。
2022-03-11 10:08:303156 ON_ERROR_PROCEED 可用于抑制由以下程序行触发的运行时错误消息。机器人控制器跳过触发错误的语句,并用有关错误的信息填充系统变量 $ERR。
2022-07-01 10:42:321991 该变量可用于评估当前执行的程序相对于提前运行。例如,该变量可用于评估程序中的错误,以便能够使用合适的故障服务功能对其进行响应。
2022-07-11 10:38:401466 KUKA 8.2系统远程连接步骤介绍,实现远程访问需要在KLIconfig.xml文件里进行更改设置.
2022-07-27 15:56:591354 该变量可用于评估相对于提前运行的当前执行程序。例如,该变量可用于评估程序中的错误,以便能够使用适当的故障服务功能对其进行响应。
2022-09-14 15:14:07519 上面讲了很多系统变量,那么在Linux系统中,这些变量存在哪里呢?为什么用户一登录shell就自动有了这些变量呢?我们先来看看下面几个文件。
2022-11-16 09:46:351319 用功能 StrFind() 可以搜索字符串变量的字符串。
2022-11-16 10:32:221096 该变量可用于评估相对于提前运行的当前执行程序。例如,该变量可用于评估程序中的错误,以便能够使用适当的故障服务功能对其进行响应。
2022-12-06 17:11:46824 通过变量可以读取许多系统状态,并且在许多情况下也可以进行设置。严格来说,这些变量存在多次-每个解释器一次。对于所有解释器,它们的名称相同。
2023-01-03 11:16:571002 在 Linux 系统中,环境变量是用来定义系统运行环境的一些参数,常见的环境变量有HOME,SHELL,PATH等等。
2023-01-18 16:10:001926 Linux是一个多用户的操作系统。多用户意味着每个用户登录系统后,都有自己专用的运行环境。而这个环境是由一组变量所定义,这组变量被称为环境变量。用户可以对自己的环境变量进行修改以达到对环境的要求
2023-01-29 10:55:46265 KUKA大众版8.2系统,配置外部轴需要在项目中进行设置选择KPP1项目用于外部轴1和KPP2使用外部轴2.
2023-01-29 15:02:061901 为了能够计算路径,例如 对于近似运动,需要使用提前运行指针读取路径规划数据。然而,不仅要处理运动数据,还要处理用于控制外围设备的算术数据和命令。
2023-01-31 09:38:34958 声明并同时初始化时,每个变量都需要有自己的 DECL 协议。无法用唯一的 DECL 协议声明和初始化多个变量。
2023-02-10 11:37:432486 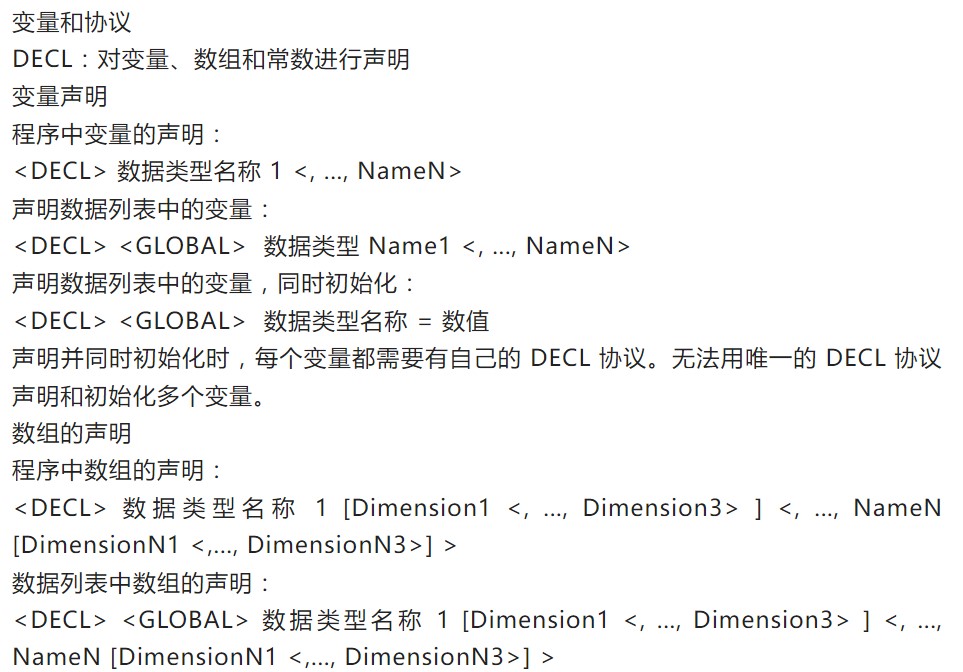
临时变量在本地属于逻辑块,不产生静态内存区域,他们位于CPU的堆栈里。本块正在运行时,其值才被保留。临时变量不能从声明它的块外存取。一个OB、FB或FC首次执行前,临时变量的值是不确定的。也不能被初始化。
2023-03-08 11:14:20592 变量包含接下来将在解释器中执行的块的数据。
2023-03-20 10:30:57927 声明并同时初始化时,每个变量都需要有自己的 DECL 协议。无法用唯一的 DECL 协议声明和初始化多个变量。
2023-03-20 11:18:251322 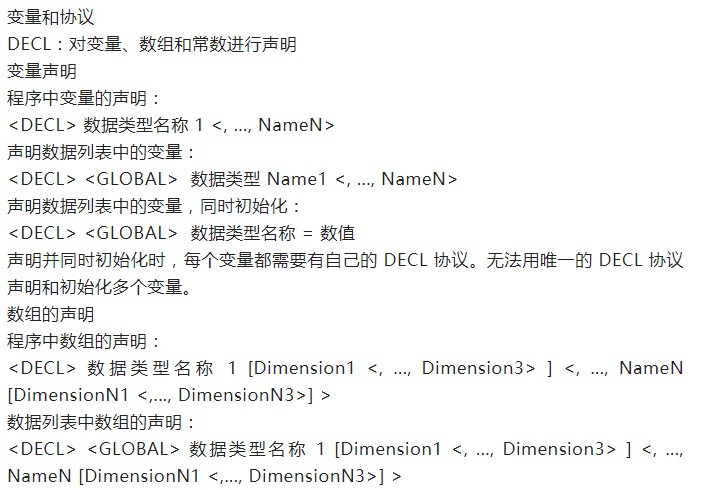
该变量可用于评估当前执行的程序相对于提前运行。例如,该变量可用于评估程序中的错误,以便能够使用合适的故障服务功能对其进行响应。
2023-03-21 11:20:40452 如果机器人控制器在Multi-Submit模式下操作(仅适用于KUKA系统软件8.3及更高版本),则变量无效。多提交模式下机器人控制器的系统状态分组在变量$PROG_INFO[]中。
2023-05-15 09:54:11763 使用了KUKA.OfficeSite,或者系统软件的映像正在办公电脑上运行。
2023-05-17 16:30:22694 POS_BACK可用于返回到中断的动作指令的起始位置$POS_BACK对应于用于近似窗口内的中断的窗口的开始,并且对应于用于在近似窗口之后的中断的窗的结束$POS_BACK触发KRL程序中的提前运行停止。
2023-05-19 09:37:412773 
在使用workvisual对程序进行更改时提示需要输入用户名与密码,此时一头雾水,机器人工程师也蒙圈,在查找资料后kuka的默认
2023-05-19 17:33:403308 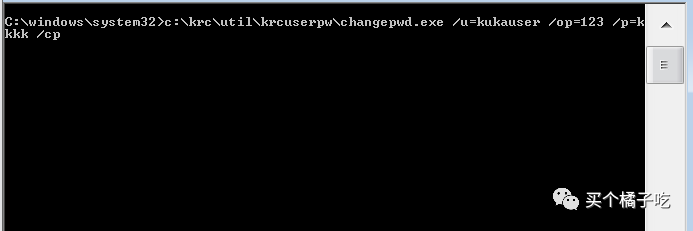
为[°] 变量是写保护的。在机器人程序中,变量触发提前运行停止。 $POS_ACT_MES 测量的笛卡尔机器人位置 E6POS结构类型的变量定义了TCP相对于BASE坐标系的实际位置
2023-05-22 14:57:152979 
$PROG_INFO[]将某些系统状态组合在一个结构中。 $PROG_INFO[ Interpreter ] = Information Interpreter 类型:INT 1:机器人翻译
2023-05-23 10:15:18531 借助Mulitprog库KrcExVarLib的功能块,可以从数组变量中读取单个或多个值,也可以将其写入数组变量。
2023-05-26 09:27:10219 []=" " 等待变量 ,通过不在外部自时进行模拟
2023-05-30 10:44:511019 
2:(F331) 吹扫是通过命令“关闭钳子”开始的。 变量3:(F332) 吹扫是通过命令“打开钳子”开始的。 配置是在宏57中完成的。 示例配置在文档中: “KS_Part_2_2_01_KS26_ROB-KUKA_project-specific_specifications” 2.铣削过程中调整行程 在开始铣削的基本设置中提供2个冲
2023-05-31 09:13:34647 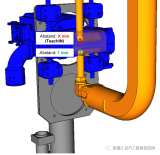
,如果处理的变量确实触发了提前运行stop,则间接触发提前运行停止。 如果使用CWRITE传输使用CAST_TO生成的缓冲区,则C
2023-06-16 16:40:011928 
系统变量的灵活应用TSMaster把系统变量作为参数引入诊断模块中,极大的拓展了诊断模块跟其他模块数据交互的能力,本文主要演示具体的操作。A系统变量作为参数系统变量具有软件内部和外部模块之间数据交互
2022-06-18 10:55:14451 
系统变量本文给大家介绍TSMaster的一个重要概念—系统变量。系统变量可以用于监测信号、传递信息,还可以用于自动化以及测试等众多领域,TSMaster几乎所有的功能都和系统变量有关。一综述用户
2022-11-09 16:28:011522 KUKA 机器人的初始化运行称为 BCO 运行。 BCO 是 B lock coincidence (即程序段重合)的缩写。重合意为 “ 一致 ” 及 “ 时间 / 空间事件的会合 ”。 在下
2023-07-17 10:42:411063 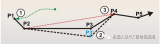
KUKA堆放件控制USER说明:
2023-08-01 17:14:26486 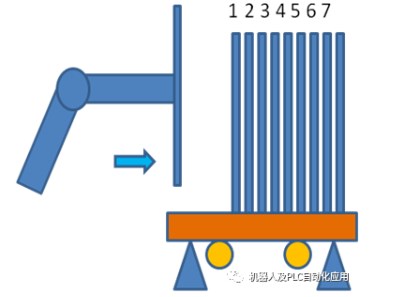
每类本地变量或参数,都有用各自关键字对标识的自己的声明子域。每个子域包含允许的详细的声明子域,子域可按任何顺序定位。
2023-08-17 11:00:13301 该变量可用于评估相对于提前运行的当前执行程序。例如,该变量可用于评估程序中的错误,以便能够使用适当的故障服务功能对其进行响应。
2023-08-27 09:52:041771 
指针化是属于间接寻址的一种类型。使用间接寻址时,应首先在运行系统中确定所用变量。定义一个变量列表,而非单个变量。
2023-11-27 11:33:04324 
环境变量的步骤及其重要性。 在开始之前,我们先了解一下环境变量的概念。环境变量是操作系统定义的一些值,用于指定操作系统及其应用程序如何运行。通过设置环境变量,我们可以指定操作系统查找可执行文件的路径,以及定义一些全局变量。 为了配置Java环境变量,我们需要进行以
2023-12-06 14:02:48332 或者可以通过 WorkVisual 更改密码。如果在机器人控制系统上安装了 KUKA.NonAdmin,则只能通过 WorkVisual 更改该密码。
2023-12-12 17:11:36375 该变量可用于评估相对于提前运行的当前执行程序。例如,该变量可用于评估程序中的错误,以便能够使用适当的故障服务功能对其进行响应。
2023-12-18 15:41:30268 设置ROS环境变量是使用ROS的重要步骤之一。本文将详细介绍如何设置ROS环境变量,包括什么是环境变量、为什么要设置ROS环境变量、如何设置ROS环境变量等。 什么是环境变量 环境变量是一种操作系统
2023-12-28 13:52:42295
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论