 电子发烧友App
电子发烧友App



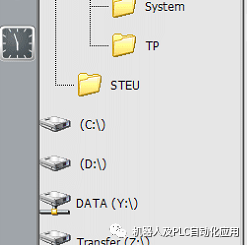
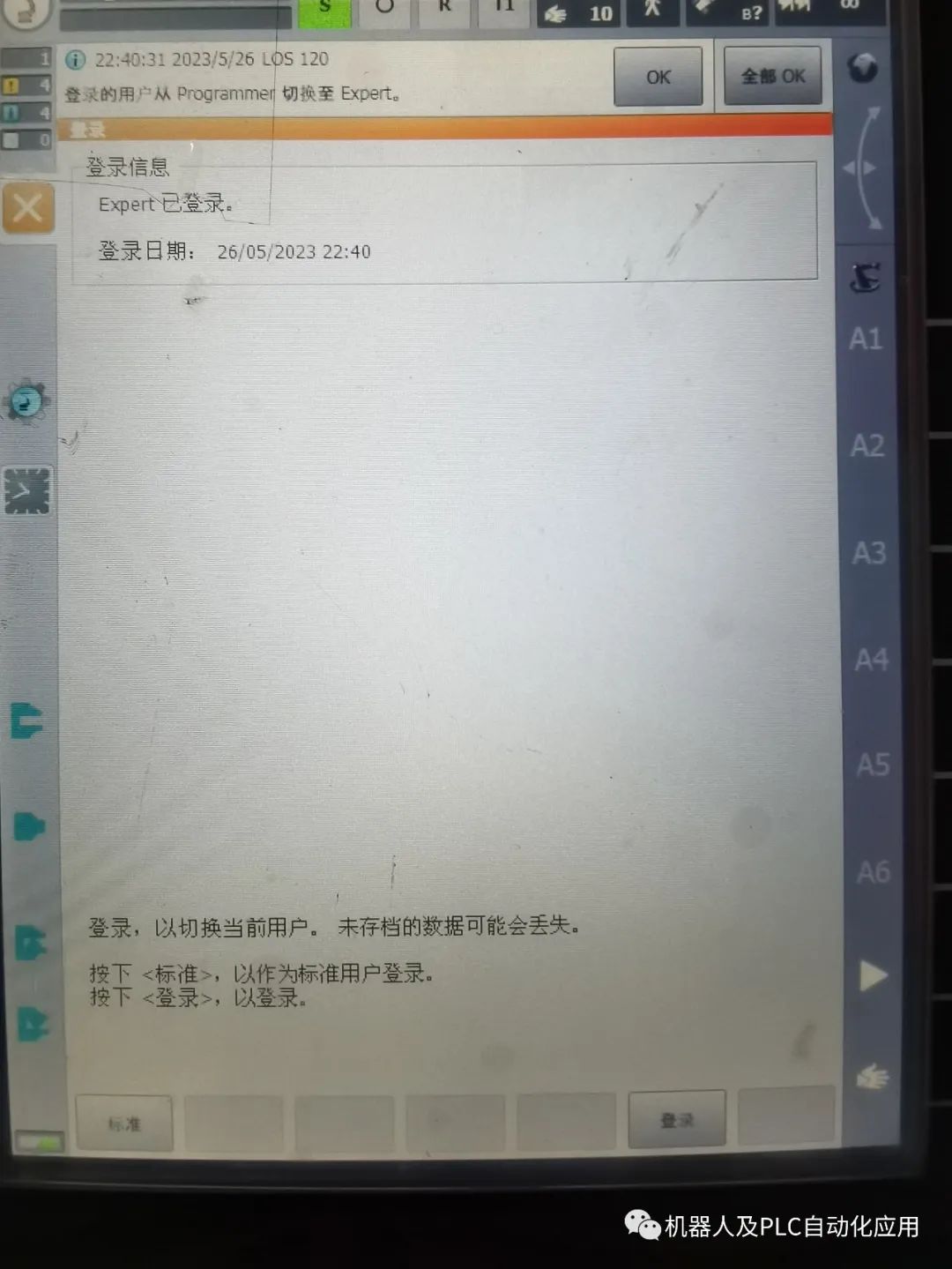
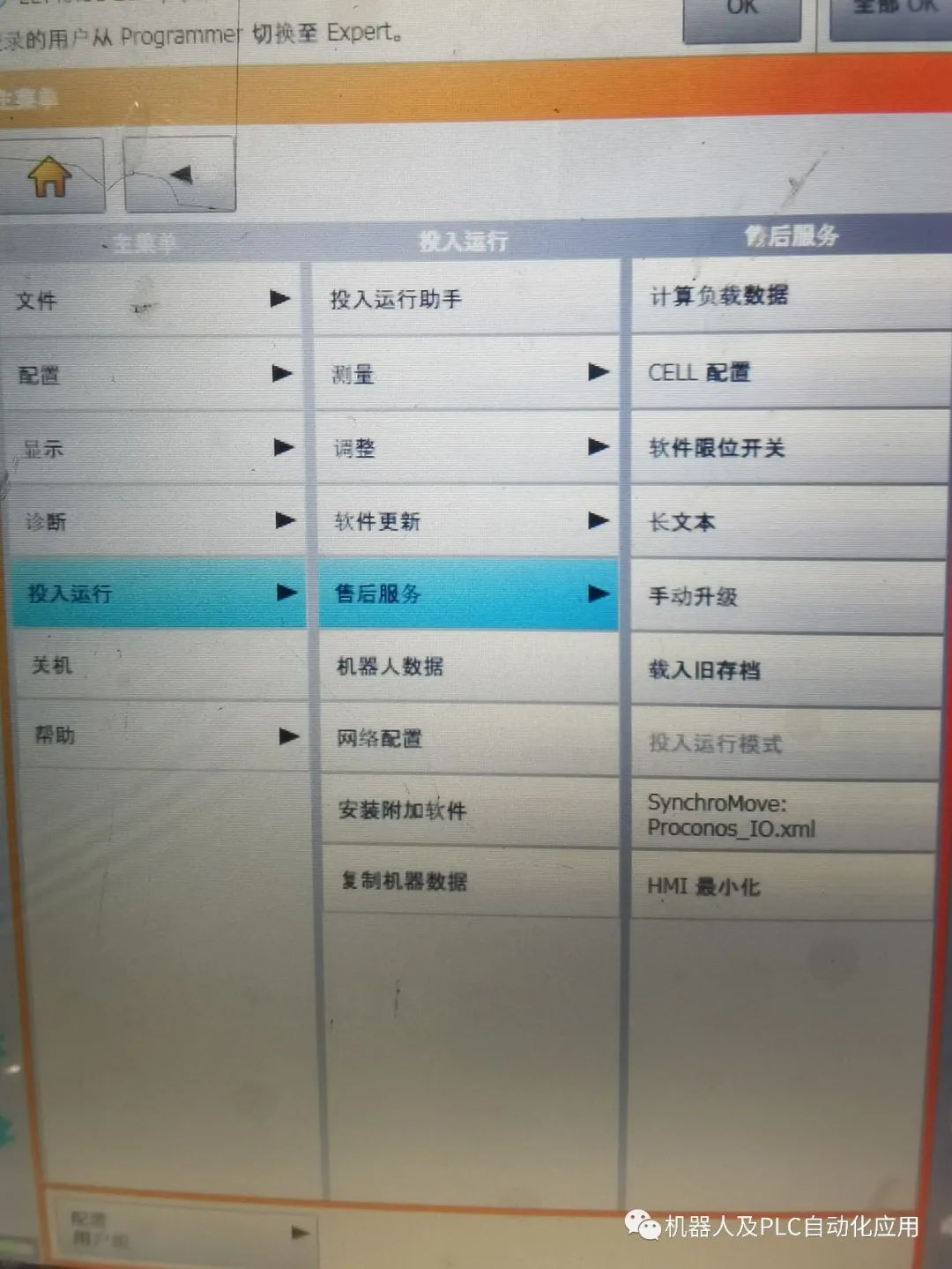
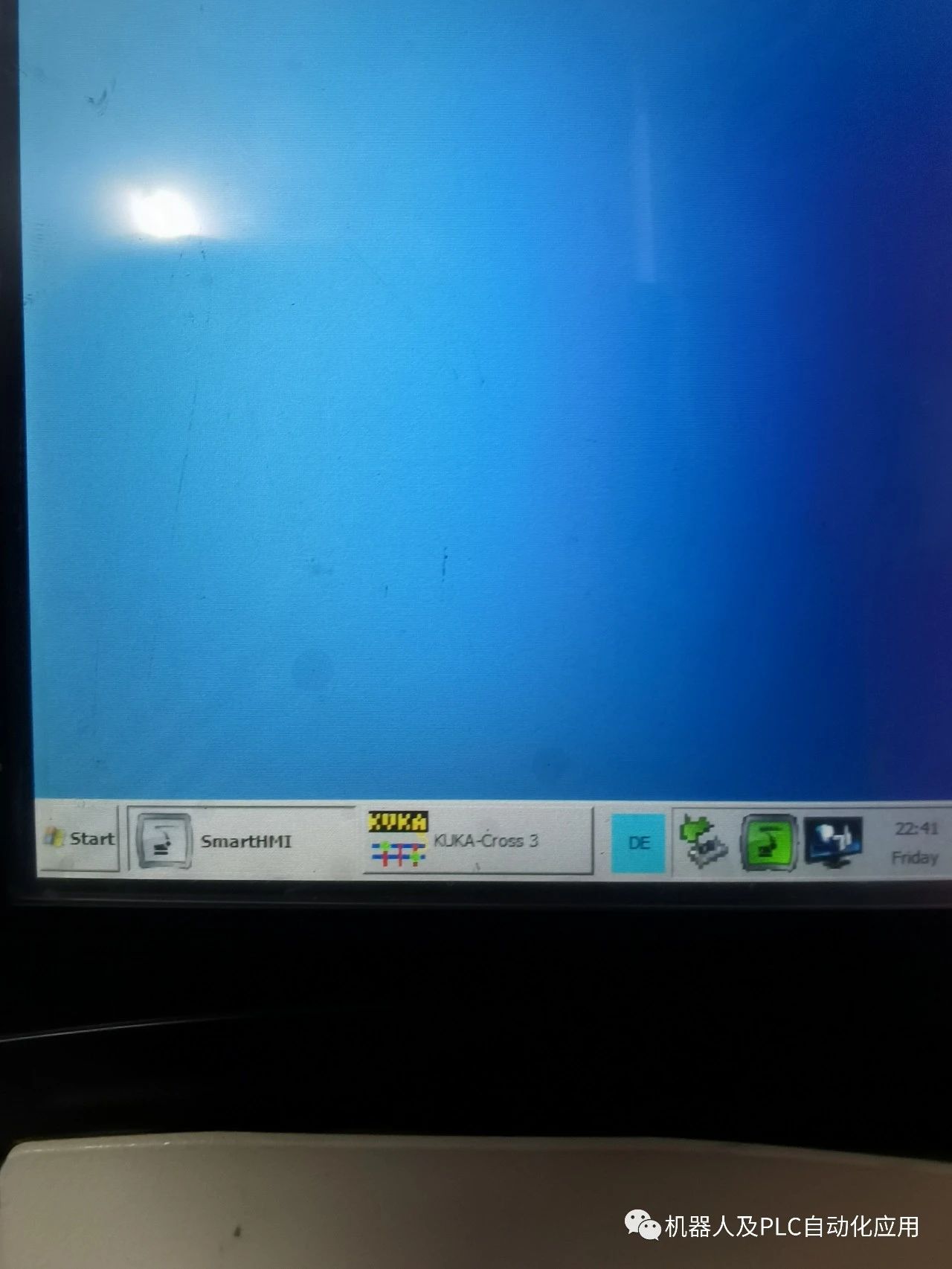
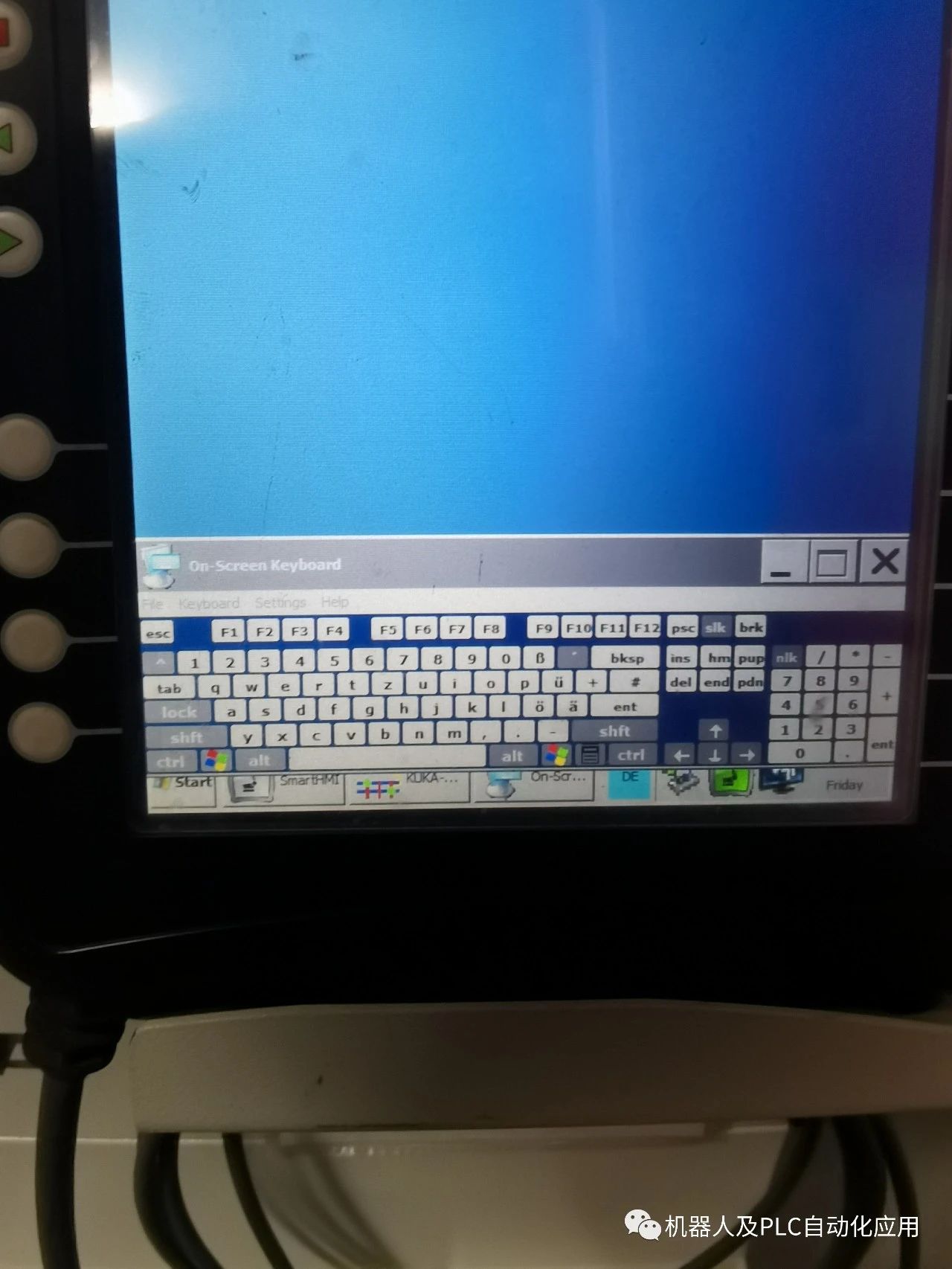
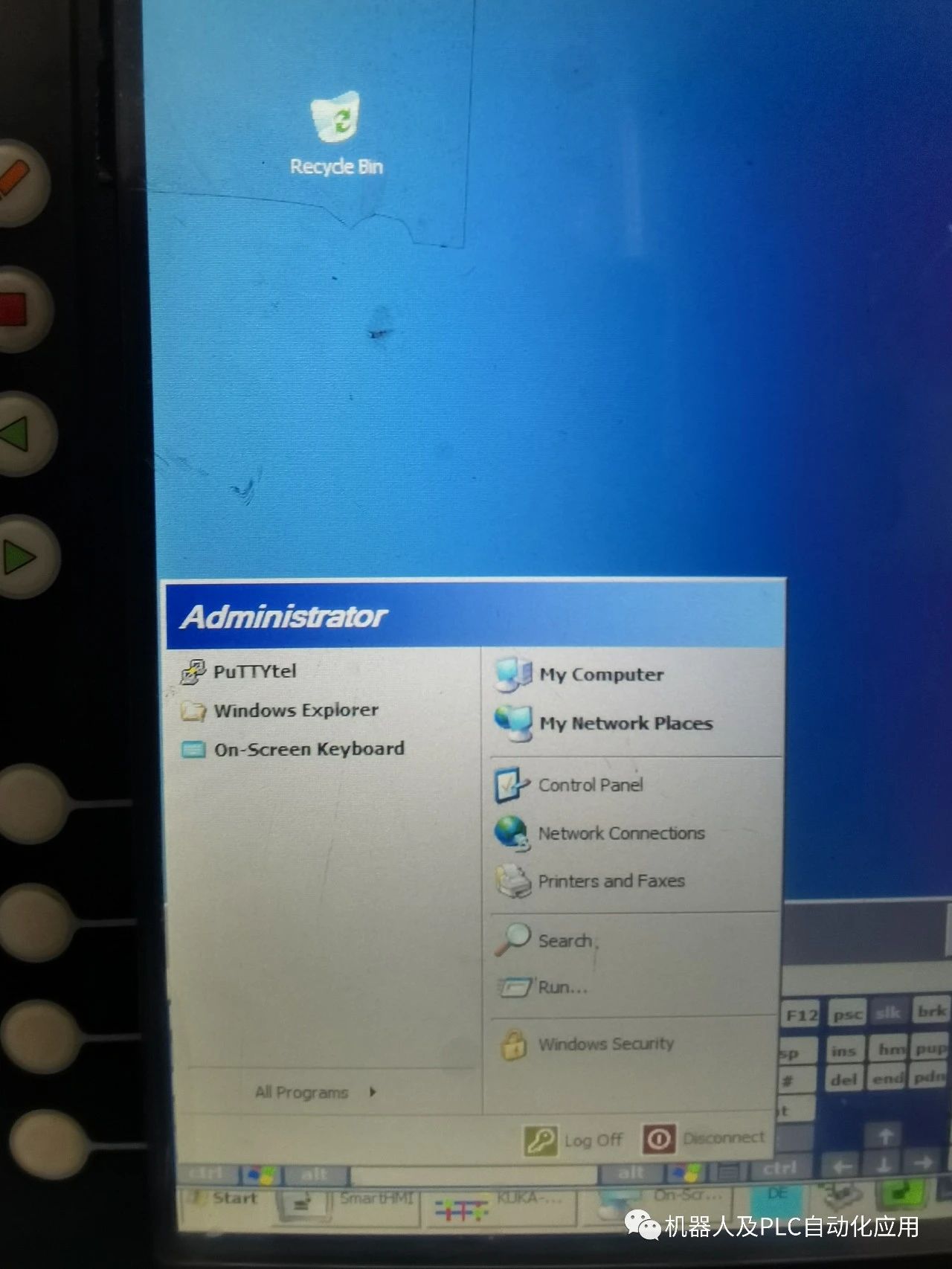
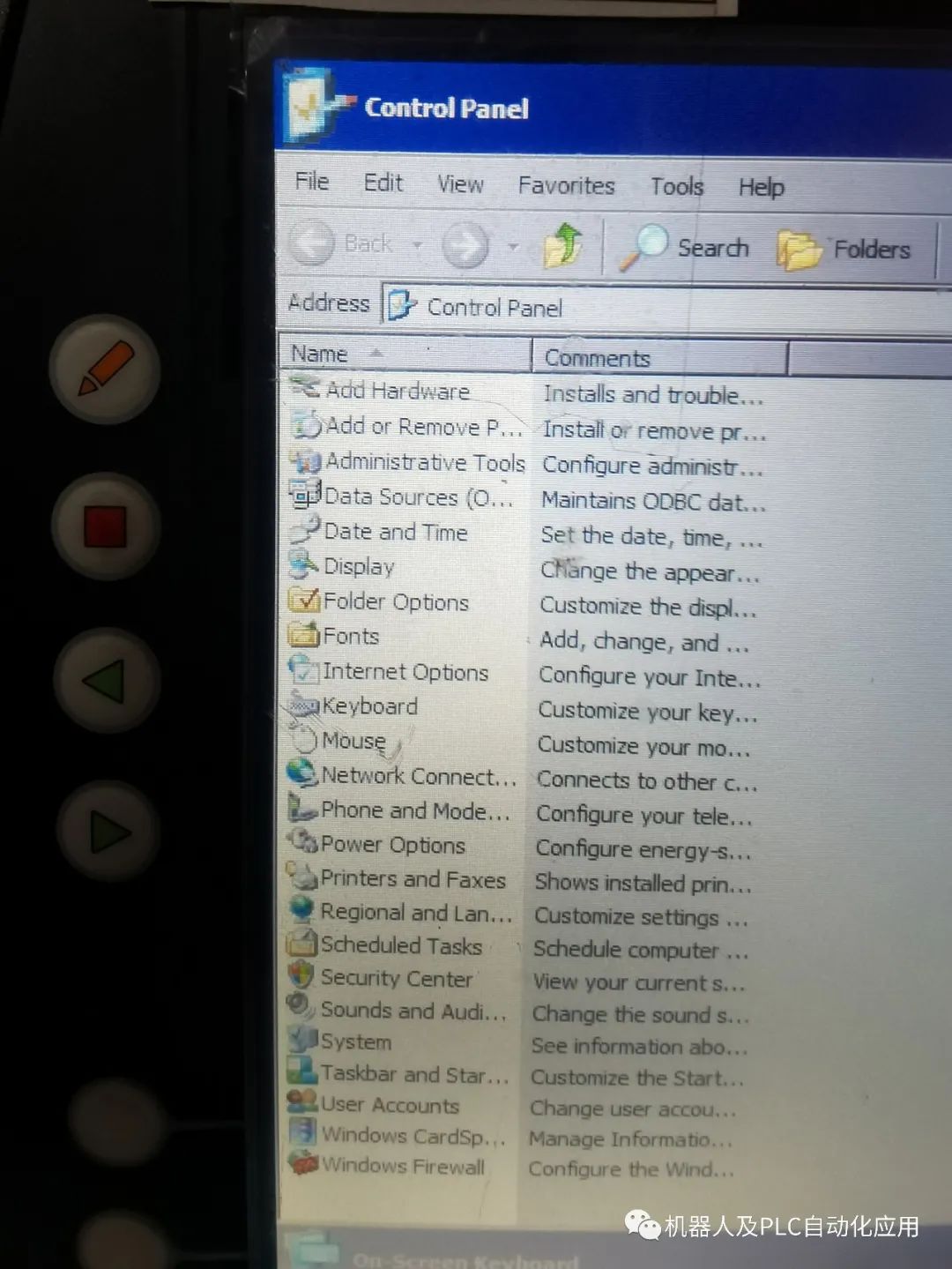
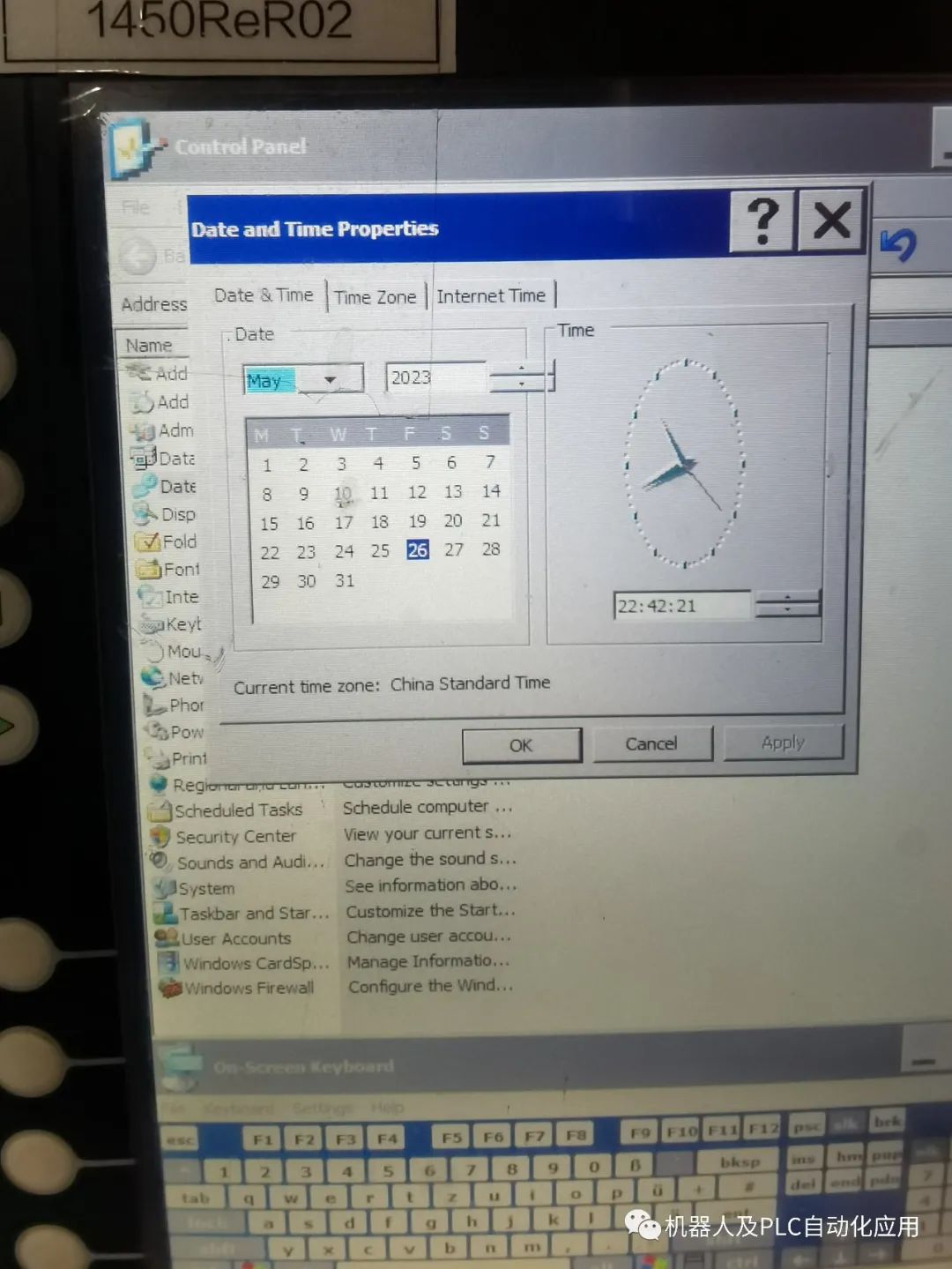
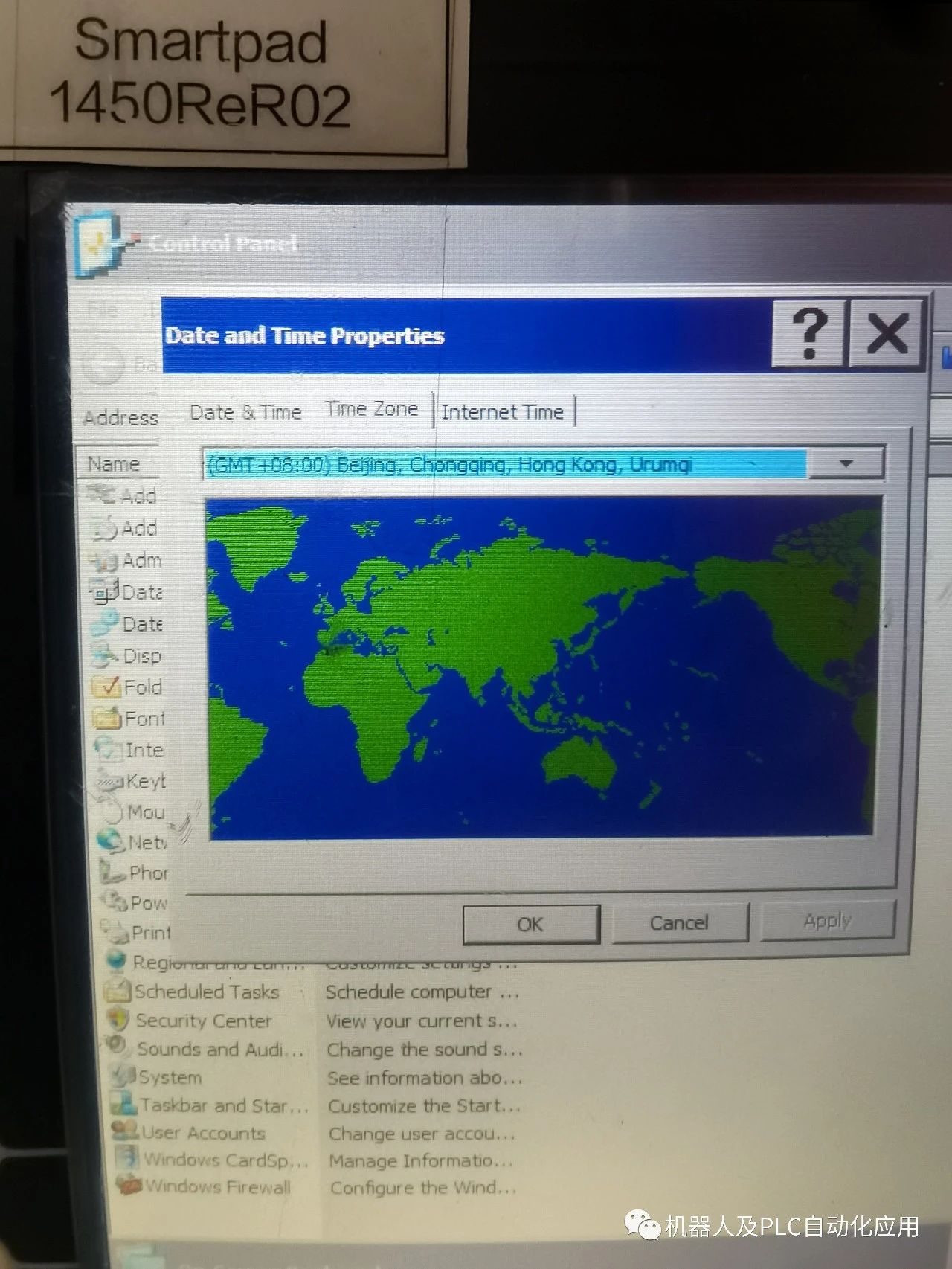
更改KUKA机器人系统时间的操作步骤
- 机器人(220833)
- KUKA机器人(10013)


相关推荐
热点推荐
KUKA机器人伺服驱动模块维修
KUKA库卡C4机器人驱动器故障报警维修库卡机器人维修内容包括库卡机器人示教器维修,KUKA伺服驱动模块维修,库卡机器人伺服电机维修,KUKA机械手PC工业电脑维修,库卡机器人电路板维修,库卡机器人
2021-09-17 07:09:52
KUKA机器人问题解答
1 开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在
2019-07-15 07:48:36
KUKA库卡机器人伺服驱动器相关型号举例
KUKA库卡机器人伺服驱动器(Servo Drive)是KUKA运动控制的重要组成部分,被普遍应用于工业机器人及数控加工中心等自动化设备中。是用来控制伺服电机的一种控制器,其作用类似于变频器作用于
2020-09-08 16:30:28
KUKA焊接机器人伺服电机常见故障及维修处理
NC错误报警5.库卡机器人伺服电机伺服系统报警6.库卡机器人伺服电机编码器报警7.库卡机器人伺服电机卡死等.苏州吉海机电设备有限公司,专业维修KUKA焊接机器人伺服电机常见故障以及各品牌机器人故障处理
2020-09-26 16:51:21
机器人系统与控制需求简介
第二章 机器人系统与控制需求简介2.1 工业机器人的系统组成机械本体:精密减速机、伺服电机、伺服驱动器、控制系统(核心零部件)控制柜示教盒2.2 机器人本体结构与传动方式简介四大家族:ABB
2021-09-08 07:44:15
机器人系统是什么?
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
机器人、协作机器人和移动机器人,你分的清楚吗
机器人”的额外指导。图1很好地展示了一个机器人系统,其具有一般受保护的工作空间和一个协同操作空间。下面的视频中对此也有介绍。ISO/TS 15066的关键主题之一是“功率和力限制”。在这种工作模式下
2018-10-30 11:33:11
机器人从事件提取规律或道理行得通吗?
了。机器人:摔跤了吗?我:没摔。机器人:与前面矛盾了。你应该摔跤。我:……人工智能可以不断地从具体事例中归纳出道理或对规律的认识,道理积累多了,就可以形成一套系统的规则。大家看这样的思路有可行性吗?
2016-03-09 14:29:12
机器人弹钢琴
各位论坛前辈你们好,我是一名在校的即将升入大二学生,专业课暂时只学了c,电路分析基础和工程制图。我跟另外4个同学正在参加学校的机器人比赛,在机器人创意表演方面,就突发奇想,是否能做一个可以弹简单
2017-05-22 17:09:06
机器人的控制系统
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理机器人的基本工作原理是示教
2021-09-13 08:40:55
机器人群控系统应用于两种机器人队形变换
笔记本电脑(Notebook)当作主控,撰写人机接口主控程序,以射频(RF)无线模块进行沟通,主控计算机可下达指令给机器人并接收机器人的状态回传数据。本文设计的主题是将此机器人群控系统应用于两种机器人队形变换,分别是横纵队形变换跟四角位置队形变换。
2019-06-27 07:02:14
机器人视觉——机器人的“眼睛”
的,也是急需的,它是保证机器人能够工作于人类生活环境的重要条件。在工作中图像采集速度较低,以及图像处理需要较长时间,给系统带来明显的时滞。而机器视觉产品的引进,极大的解决了这一题目。机器视觉产品的应用,为机器人植进“眼睛”,使得机器人能够更高效率、高精度的工作。
2015-01-23 15:02:27
Gene8310智能家庭服务机器人系统怎么设计?
家庭服务机器人是机器人的发展方向,是我国进一步加强机器人技术研究的突破口。家庭服务机器人旨在将家庭成员从家居的繁琐家务中解放出来,给家庭成员提供帮助、娱乐等。
2019-08-20 06:57:41
LabVIEW的六轴工业机器人运动控制系统
将系统分为算法实现和仿真模块、DSP控制模块、及机器人驱动模块,以验证算法的有效性。
KUKA KRAGILUS工业机器人的实体控制测试:最终,项目工业机器人的实体控制。在LabVIEW建立的3D仿真
2023-12-21 20:03:18
一种工业机器人操作调整工技能鉴定平台
ZN-ZN605型 六轴机器人、自动上料模块、视觉检测模块、立体仓库模块、模拟焊接模块、码垛及轨迹示教模块、总控系统模块。 ZNH-IRW04型 工业机器人操作调整工技能鉴定平台要求参赛选手根据竞赛任务
2021-07-01 13:00:49
什么是工业机器人
机械手之间有防护墙隔开,操作者可通过观察窗或闭路电视对从机械手操作机进行有效的监视,主从机械手系统的出现为机器人的产生为近代机器人的设计与制造作了铺垫。1954年美国戴沃尔最早提出了工业机器人的概念,并
2015-01-19 10:58:38
华南机器人应用培训中心工业机器人培训班招生
`华南机器人应用培训中心拥有各种设备,开展各种不同的机器人培训班。打造各种工业现场常见的机器人工作站,现开展KUKA、发那科、三菱、ABB、爱普生工业机器人培训对外招生。 一、认识机器人技术:工业
2015-09-02 14:03:18
基于机器人的曲线焊接系统
和自由度的限制,焊枪难以到达某些焊缝,需加入焊接变位机拖动工件使相应焊缝处于理想的焊接位置,以方便机器人进行焊接操作。本研究设计了一种基于机器人的曲线焊接系统,采用机器人和 PLC联合控制变位机旋转和翻转
2018-03-13 09:15:48
基于图像的机器人视觉伺服系统该怎么设计?
制造出像人一样具有智能的能替代人类劳动的机器人,一直是人类的梦想,人类获取的信息80%以上是通过视觉。因此,在智能机器人的研究中,具有视觉的机器人的研究也就成了第一位的。对机器人视觉伺服系统的研究是机器人领域中的重要内容之一,其研究成果可应用在机器人自动避障、轨迹跟踪和运动目标跟踪等问题中。
2019-09-27 08:07:35
如何系统性地学习工业机器人技术?
结构系统由机身,手臂,末端操作器的三大件组件,没意见都是由若干的自由度,构成一个多自由度的机械系统,若机身具备行走你的机构,便构成行走机器人,若机身不具备行走及要转机构,侧构成单机械人臂,手臂一般由
2016-03-06 12:56:19
如何实现移动机器人的设计?
,导航技术,计算机技术,人工智能等多个领域,因而对移动机器人的控制部分提出很高的要求,特别是视觉传感器的出现,要求控制系统不仅存储量大,而且处理速度快等。以往基于PLC和单片机控制的移动机器人就不能很好
2020-11-23 15:08:52
如何设计智能灭火机器人控制器?
性能与可靠的机械控制性能的同时保证,才能在短时间内准确寻找到火源并灭火回家。在此以ARM9处理器为核心,对基于嵌入式系统的智能灭火机器人进行了设计。本文将从硬件和软件方面讲述智能灭火机器人控制器的实现方法,并且给出了机器人灭火的具体实验,验证了方案的可行性,为智能灭火机器人的进一步研究提供了平台。
2019-07-31 06:23:18
嵌入式机器人控制系统设计的组织架构是怎么样的?
移动机器人是一种能够感知外部环境,在有障碍物的环境中能够实现动态决策与规划,从而完成避障等多种功能的综合系统。机器人系统通常分为机构本体和控制系统两部分,控制系统的作用是根据用户的指令对机构本体进行
2020-03-06 07:07:07
工业机器人有哪几个子系统组成?各自的作用是什么?
工业机器人的定义是什么?有哪些特点?工业机器人有哪几个子系统组成?各自的作用是什么?工业机器人的主要技术参数有哪些?
2021-07-05 07:20:36
工业机器人的技术原理
形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。 机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。 工业机器人控制技术
2018-11-23 10:40:38
工业机器人的末端关节旋转该精确控制?
机器人的传动和布局设计从理论上讲应该是比较成熟的领域,如果有样机,拆开一看就可以知道大部分的结构。但是在结构优化设计经验、装配规范的标准化、零配件的按需定制以及供应链优化等方面国内厂商还需要很长时间
2018-11-01 11:08:12
工业机器人组成结构相关资料分享
工业机器人是近两年机械行业最热的字眼,随着企业工业机器人的增多,很多机械工程师对于工业机器人充满了好奇。作为机器人四大家族之一的KUKA,已经被美的收购,小编这就带你走近KUKA工业机器人的内部结构
2021-07-05 06:44:21
库卡KUKA机器人四种启动方式介绍
机器人先到达BCO安全参考的,然后在按下启动按钮,机器人就可以正常运行程序。 (2)操作步骤 A:编写程序并且调试程序等; B:手动状态选择需要运行的程序; C:手动状态时候上电运行程序,机器人速度调节到
2020-09-04 15:45:41
库卡机器人MGV电源模块维修
PH1013-2840库卡机器人KUKA主机维修KUKA驱动器模块维修C4库卡机器人驱动电源维修KPP600 3X64 KUKA机器人配件维修北京KUKA库卡机器人模块维修 KRC4 KPC4机械行业维修:西门子系统、法那克系统、沙迪克、FIDIA、天田、AMADA、友嘉、大宇系统;加工中心、..
2021-09-08 07:30:00
怎么设计基于DSP和FPGA的机器人声控系统?
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息处理
2019-08-21 07:51:24
怎么设计基于DSP和FPGA的机器人声控系统?
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息处理
2019-08-30 08:23:42
智能扫地机器人解决方案
(2006-2020年)》中,明确将智能服务机器人技术作为重要发展方向之一,要求以服务机器人和危险作业机器人应用需求为重点,研究设计方法、制造工艺、智能控制和应用系统集成等共性基础技术。我国扫地机器人
2017-05-27 13:31:20
智能监控机器人该怎么设计?
智能监控机器人是近年来机器人应用工程中一项前沿性的题目,智能化探测小车是智能行走机器人的一种。智能监控机器小车就是针对上述情况,在参考了目前大多数智能机器人的基础上,以降低成本为原则设计的。小车具备
2019-10-14 07:37:52
服务机器人的视觉系统怎么设计?
随着计算机科学和自动控制技术的发展,越来越多的不同种类的智能机器人出现在工厂、生活当中,机器人视觉系统作为智能机器人系统中一个重要的子系统,也越来越受到人们的重视。它涉及了图像处理、模式识别和视觉
2020-04-07 07:27:24
桁架机器人操作注意守则
山东康道资讯:桁架机器人操作注意守则!好的桁架机器人守则能让性能不断提高(高速度、高精度、高可靠性、便于操作和维修),机械手控制器系统也跟着向基于PC机的开放型控制器方向发展,便于标准化、网络化
2018-09-27 15:54:21
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
我看NI有Robotics Toolkit for KUKA KR C2的附加包,这个怎么用啊?如何和kuka机器人建立通讯啊?是Tcp接口吗?
2023-10-21 20:59:28
请问能分享ROS机器人操作系统的一些资料吗?
菜鸟想要学习ROS机器人操作系统,但是没能找到系统的资料,请问有哪位大神研究过,可以分享一些资料吗?跪谢了!!!!!!!!!
2019-02-19 23:14:23
零基础玩转工业机器人
知识体系分解细化,对ABB工业机器人知识要点做了针对性解析,并配以详细的操作步骤。全书以工业机器人组成为切入点,系统地介绍了ABB工业机器人的主要技术参数、手动操纵方法、坐标系定义流程、I/O配置过程
2018-10-29 17:03:22
机器人关节模组
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 16:25:29
ABB 21212518-453机器人配件
产品介绍 ABB机器人产品线丰富,包括多关节机器人、协作机器人、喷涂机器人、SCARA机器人以及自主移动机器人(AMR)等多关节机器人:ABB的多关节机器人是六轴关节型
2024-09-30 17:56:07
KUKA机器人相关分类及型号一览
FAMULUS。自FAMULUS问世后,KUKA带领机器人技术进入一个全新的时代,工业自动化的全球布局也正式拉开帷幕。 1996年,KUKA的工业机器人研发取得跨越性发展。由KUKA公司开发的首个基于PC机的控制系统开始投放市场,由此开创了真正的以软件、控制系统和机械设备的完美结
2017-09-29 17:11:14 0
0
0库卡机器人基础教程和库卡C4编程指南及焊接机器人教程合集免费下载
本文档的主要内容详细介绍的是库卡编程资料入门课件库卡机器人基础教程和库卡C4编程指南及焊接机器人教程合集免费下载包括了:KUKA基础培训之1-机器人系统的结构和功能,KUKA基础培训之2-机器人运动
2019-04-22 08:00:0042
42西门子1500与KUKA工业机器人的Profinet通讯步骤
打开WorkVisual4.0并在线下载KUKA备份,有时候若你不知道使用该软件的哪种版本的话,你可以从机器人控制柜拷出来,一般机器人发货时会把能用到的软件都备份在机器人的控制柜内,这是你可以用U盘拷出来
2019-04-28 17:51:34 14416
14416
14416KUKA机器人折叠瓦楞纸板方案
KUKA 和 Tricor 公司最近共同完成了一个项目:一台灵敏型 KUKA LBR iiwa 机器人,可用于纸箱坯料的折叠和粘接。瓦楞纸板被运送至包装机器人的工作区域内。
2020-05-09 11:12:484845
4845KUKA库卡机器人MGV电源模块维修PH1013-2840
PH1013-2840库卡机器人KUKA主机维修KUKA驱动器模块维修C4库卡机器人驱动电源维修KPP600 3X64 KUKA机器人配件维修北京KUKA库卡机器人模块维修 KRC4 KPC4机械行业维修:西门子系统、法那克系统、沙迪克、FIDIA、天田、AMADA、友嘉、大宇系统;加工中心、..
2022-01-12 10:39:4011
11WorkVisual将机器人控制系统配给实际应用的机器人控制系统步骤
用该操作步骤可将项目中的每个机器人控制系统分配给一个实际应用的机器人控制系统。然后,项目可从 WorkVisual 传输到实际应用的机器人控制系统中。
2023-03-08 11:20:267344
7344弧焊机器人操作流程是什么?
弧焊机器人操作流程是什么?弧焊机器人操作流程一共11个步骤,分别是检查点检设备、工装等,并做好相应的记录;接通机器人控制箱焊机等电源;检查机器人是否启动等。
2023-03-17 10:32:422458
2458
KUKA机器人编程
机器人 Roboter 这个概念源于斯拉夫语中的字 robota,意为重活。 工业机器人这个词的官方定义为: “ 机器人是一种可自由编程并受程序控制的 操作机。” 控制系统、操作设备以及连接
2023-05-06 14:39:471
1KUKA机器人系统变量$PRO_NAME所选程序的名称(参考解释器)
如果机器人控制器在Multi-Submit模式下操作(仅适用于KUKA系统软件8.3及更高版本),则变量无效。多提交模式下机器人控制器的系统状态分组在变量$PROG_INFO[]中。
2023-05-15 09:54:112657
2657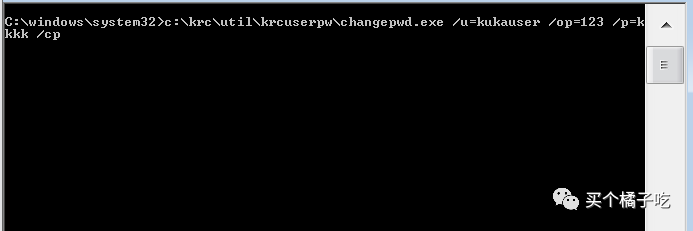
KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤
本次内容来简单谈一谈KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤。
2023-07-05 10:10:209045
9045
焊接机器人的操作步骤
焊接机器人的操作步骤有哪些?焊接机器人不仅提高了生产效率,降低了生产成本,而且还能有效地保障焊缝的质量和稳定性,代替人工在恶劣的环境中工作,工业机器人集成商无锡金红鹰带您了解操作步骤。
2023-07-18 16:31:162616
2616更改KUKA C 4 Windows系统的密码
或者可以通过 WorkVisual 更改密码。如果在机器人控制系统上安装了 KUKA.NonAdmin,则只能通过 WorkVisual 更改该密码。
2023-12-12 17:11:362511
2511库卡KUKA机器人常见故障维修
; ⑤盘管灌溉不足; 2.维修期间KUKA机器人伺服电机过热故障排除 ①降低电源电压(例如,调整电源变压器的抽头); ②增加电源电压或更换电源; ①修理铁芯并排除故障; ①减载;按照规定时间检查启动; ⑤采用二次浸渍和真空浸渍工艺; 机器人PCB维护中未发现错
2025-03-08 09:16:201623
1623- 设计技术
- 可编程逻辑
- 电源/新能源
- MEMS/传感技术
- 测量仪表
- 嵌入式技术
- 制造/封装
- 模拟技术
- RF/无线
- 接口/总线/驱动
- 处理器/DSP
- EDA/IC设计
- 存储技术
- 光电显示
- EMC/EMI设计
- 连接器
- 行业应用
- LEDs
- 汽车电子
- 音视频及家电
- 通信网络
- 医疗电子
- 人工智能
- 虚拟现实
- 可穿戴设备
- 机器人
- 安全设备/系统
- 军用/航空电子
- 移动通信
- 工业控制
- 便携设备
- 触控感测
- 物联网
- 智能电网
- 区块链
- 新科技
- 联系我们
- 广告合作
- 王婉珠:wangwanzhu@elecfans.com
- 内容合作
- 张迎辉:mikezhang@elecfans.com
-
关注我们的微信

-
下载发烧友APP

-
电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1
评论