 电子发烧友App
电子发烧友App



作为数控机床、工业机器人及其它产业机械控制的关键技术之一,伺服驱动技术一直在国内外普遍受到关注。
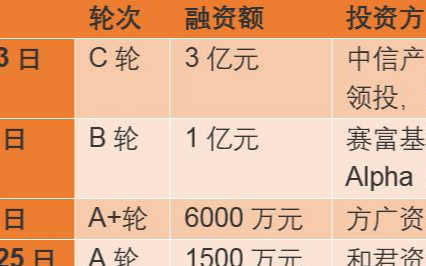
近日消息,工业机器人伺服驱动领先者清能德创正式宣布完成过亿元战略融资。本轮融资由国风投(北京)智造基金、国新科创基金联合领投,中车资本基金、中科海创基金、北创投基金跟投。此次大额融资,将为国产伺服品牌再添一份助力。
伺服系统是有哪些结构组成的?它的工作原理是什么?
伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。它的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制非常灵活方便。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角),其结构组成和其他形式的反馈控制系统没有原则上的区别。伺服系统最初用于国防军工, 如火炮的控制, 船舰、飞机的自动驾驶,导弹发射等,后来逐渐推广到国民经济的许多部门,如自动机床、无线跟踪控制等。
“伺服(Servo)”一词源于希腊语“奴隶”,意即“伺候”和“服从”,伺服系统就是指可以按照外部指令进行人们所期望的运动的系统,实现包括位置、方位、状态等输出量的自动控制。它不仅是工业自动化的关键环节,也是实现精准定位、精准运动的必要途径。作为伺服系统的执行单元,伺服电机种类繁多,其中永磁同步伺服电机因其高效节能、操作简易等优点,逐渐成为市场主流。相比于步进电机,伺服电机在控制精度、稳定输出、过载能力等性能上优势明显,在工业领域广泛使用。本文将简单介绍伺服系统以及伺服电机的工作原理及其分类,并对伺服电机的常用性能指标作出说明。
伺服系统构成及其工作原理
伺服系统主要由伺服驱动器、编码器和伺服电机等部件构成。伺服系统是一种自动控制系统,能使物体的位置、方位、状态等输出被控量跟随输入目标(或给定值)的变化而变化。伺服驱动器在接收下达的控制命令后,会发出信号给伺服电机驱动其转动;与此同时,嵌入电机的编码器将伺服电机的运动参数反馈给伺服驱动器,由伺服驱动器完成对信号的汇总、分析和修正。由此,伺服系统以闭环的形式精确控制了执行机构(电机等机械传动装置)的输出变量。
1、构成
伺服驱动器主要由伺服控制单元、功率驱动单元、通讯接口单元组成。其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等。
伺服驱动器大体可以划分为功率板和控制板两个模块。功率板是强电部分(功率大、电流大、频率低的电力部分),其中包括两个单元,一是功率驱动单元IPM,用于电机的驱动,二是开关电源单元,为整个系统提供数字和模拟电源。控制板是弱电部分,是电机的控制核心,也是伺服驱动器技术核心控制算法的运行载体。控制板通过相应的算法输出脉冲宽度调制(PWM)或脉冲频率调制(PFM)信号,作为驱动电路的驱动信号,来改变逆变器的输出功率,以达到控制交流伺服电机的目的。其中,逆变器是把直流电能(电池、蓄电瓶)转变成定频定压或调频调压交流电(一般为220V,50Hz正弦波)的转换器。
伺服驱动器主要材料成本中,IGBT和DSP芯片占总材料成本的50%以上。IGBT即绝缘栅双极型晶体管,是由双极型三极管和绝缘栅型场效应管组成的复合全控型电压驱动式功率半导体器件,兼有金氧半场效晶体管的高输入阻抗和电力晶体管的低导通压降两方面的优点,用于功率驱动单元,能够辅助直流电转变为交流电。我国IGBT市场90%以上被外资企业占领,在短时间内IGBT实现国产化较为困难。
2、工作原理
控制单元是整个交流伺服系统的核心,是系统位置控制、速度控制、转矩和电流控制器。控制板所采用的数字信号处理器(DSP)除了具有快速的数据处理能力外,还集成了丰富的用于电机控制的专用集成电路,如AC/DC(交流直流)转换器、PWM发生器、定时/计数器电路、异步通讯电路、CAN(控制局域网络)总线收发器以及高速的可编程静态RAM(随机存取存储器)和大容量的程序存储器等,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。
功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路。功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电再通过逆变器变频输出交流电来驱动伺服电机。功率驱动单元的整个过程可以简单的说就是AC-DC-AC的过程。
伺服回路可根据输入命令信号提供电机的比例控制。简单的伺服驱动器包含用于控制扭矩的单个伺服回路。更先进的伺服驱动器可增设速度环,并且还可以包含位置环。在完整的伺服驱动器系统中,运动控制器发出的数字信号将命令所需的运动轨迹利用这三个伺服回路来优化性能。每个环路向后续环路发送信号,并监测适当的反馈元件,从而进行实时更正,以匹配命令参数。
3、伺服系统的组成
伺服系统主要由伺服控制器、驱动电路、伺服电动机及相应反馈检测器件组成。
(1)伺服电机
伺服电机是指在伺服系统中控制机械元件运转的电机,伺服电机内部带有编码器,能实时反馈运动数 据给伺服驱动器。伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,可把所收到的电信号转换成电机轴上的角位移或角速度输出。
(2)伺服驱动器
伺服驱动器是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服 系统的一部分,它的主要作用是按照控制命令的要求,对功率进行放大、变换与调控等处理之后传递给伺 服电机。
(3)传感装置
传感装置最常用的是编码器,一般伺服电机内自带编码器,用以反馈采集的实际运动数据给驱动器, 从而实现运动控制闭环。
(4)伺服驱动器对伺服电机的控制
伺服驱动器一般通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位。
①位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动 的角度,也有些伺服可以直接对速度和位移进行赋值,位置模式可以对速度和位置都有很严格的控制。
②速度模式:速度模式通过模拟量的输入或脉冲频率的输入进行转动速度的控制,在有上位控制装置的外环 PID 控 制时速度模式也可以进行定位,但必须把电机的位置信号或负载的位置信号给反馈上位机做运算用。
③转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,可 以通过即时的改变模拟量的设定来改变设定的力矩大小。
4.伺服系统原理
当人为的给定控制信号并被伺服控制系统接收时,执行机构就会按照控制信号的指令进行一系列的运动和动作;如果不再出现信号,被控传动装置停止动作直到控制信号的来临。
5.伺服系统分类
(1)根据其作用对象的不同,可分为位置伺服系统和速度伺服系统两大类。
1)位置伺服系统
是指能够对目标指令位置进行精确的跟踪和定位的伺服系统。根据有无反馈,位置伺服系统分为开环控制和闭环控制两种。
开环位置伺服系统具有结构简单、成本低的优点,但是不具有位置、速度反馈功能,其位置控制精度依赖于步进电机的步距角和传动机构的精度。
闭环控制分为全闭环控制和半闭环控制。全闭环控制下,检测元件直接检测被控对象在工作台上的位移,并把该位移反馈给控制器,以构成全闭环控制。由于控制器可以根据被控对象的实际位移进行控制,因此全闭环控制具有很高的定位精度,可以消除从电机到机械传动机构再到被控对象,整个过程的误差。然而,闭环控制结构比较复杂,成本较高,难以实现。
2)速度伺服系统
通常被驱动机具的负载力矩是经常变化的,供电电源的电压和频率也是经常变化的,那么,被驱动对象的运行速度通常也是变化的。因此,速度伺服系统主要任务是保持被驱动的机具 (或称负载) 在所需要的精确的速度 (绝不是1种速度) 下稳定运行。
(2)按照其执行电动机的不同又可分为直流伺服系统和交流伺服系统。
1)直流伺服系统
直流伺服系统指的就是伺服电机是采用直流电机的伺服系统。
2)交流伺服系统
交流伺服系统主要由交流伺服驱动器(或称控制器)和交流伺服电动机组成,系统以驱动器为核心,驱动控制交流伺服电动机的运转,转矩、速度或位置的闭环控制使系统动态性能和静态性能优异。工业机器人有4大组成部分,分别为本体、伺服、减速器和控制器。而其中,工业机器人电动伺服系统的一般结构为三个闭环控制,即电流环、速度环和位置环。一般情况下,对于交流伺服驱动器,可通过对其内部功能参数进行人工设定而实现位置控制、速度控制、转矩控制等多种功能。
伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
伺服系统是以变频技术为基础发展起来的产品,是一种以机械位置或角度作为控制对象的自动控制系统。伺服系统除了可以进行速度与转矩控制外,还可以进行精确、快速、稳定的位置控制。
广义的伺服系统是精确地跟踪或复现某个给定过程的控制系统,也可称作随动系统。
狹义伺服系统又称位置随动系统,其被控制量(输出量)是负载机械空间位置的线位移或角位移,当位置给定量(输入量)作任意变化时,系统的主要任务是使输出量快速而准确地复现给定量的变化。
6、伺服系统的控制系统
机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。
1、比较环节
比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
2、控制器
控制器通常是计算机或PID(比例、积分和微分)控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
3、执行环节
执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。
4、被控对象
被控对象指被控制的物件,例如一个机械手 臂,或是一个机械工作平台。
5、检测环节
检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
7、伺服系统的特点和功用
伺服系统与一般机床的进给系统有本质上差别,它能根据指令信号精确地控制执行部件的运动速度与位置。伺服系统是数控装置和机床的联系环节,是数控系统的重要组成,具有以下特点:必须具备高精度的传感器,能准确地给出输出量的电信号;功率放大器以及控制系统都必须是可逆的;足够大的调速范围及足够强的低速带载性能;快速的响应能力和较强的抗干扰能力。
来源:中国传动网
责任编辑:游小秀
审核人:王颖
审核编辑:刘清












 工商网监
工商网监
评论