路径规划技术是扫地机器人研究的核心内容之一,机器人定位与环境地图构建就是为路径规划服务的。所谓机器人路径规划技术,就是机器人根据自身传感器对环境的感知,自行规划出一条安全的运行路线,同时高效完成作业任务。通常,移动机器人路径规划需要解决3个问题。
2016-06-06 09:40:41 4864
4864 请各位大神指导,移动式机器人是怎么做EMC保护的,机器人是锂电池供电,所以就不能接大地了,那么对机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
机器人路径规划学习者一枚,谁了解现在最新的路径规划方法及实现,求指教,不胜感激啊。。。。。。。。。。。
2013-09-03 21:15:09
列举部分学习过程中接触的部分书籍,部分有中文版,部分有更新版本。1.机器人基础书籍适合入门的书籍:机器人学机器人建模规划与控制机器人学、机器视觉与控制——MATLAB算法基础机器人学导论——分析控制
2019-05-22 06:53:10
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
安静高效的机器人正在接管——阻止它们已经太迟了。不,这不是机器人世界末日另一个可怕的故事。这是关于您下一设计硬件预算和规划面临威胁的问题。虽然您无法阻碍技术变革,但是您可以预测其影响。
2019-07-17 08:08:16
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
有人会用labview调用python吗,或者有其他方法能实现这个要求?我在labview做了一个磁场发生的程序,驱动磁机器人运动,而且我这个机器人是绕着一个向量旋转向前的,就输入幅值频率那些就可以
2022-11-18 16:21:25
我现在在做机器人的路径规划,想用人工势场的算法,通过用这个labview仿真,就是给定一些起始点,终点,还有这个障碍物的坐标,中间是这个算法计算出来的一些点,能够在执行算法的时候用labview描出这些点,最终形成一条规划好的路径。有没有朋友做过,给点意见呗
2017-05-15 15:25:22
LCS的动态规划算法(自底向上)
2020-05-25 15:06:29
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色
2023-12-21 20:03:18
,电机闭环控制,运动力学受力分析及部件受力分析,矩阵不等式实验,运动行走倒立摆实验、。4) 运动算法:路径规划,自主定位,运动导航,自建地图。5) 嵌入式实验:嵌入式软件运用及6) 人机交互:脑电波、视觉及肢体等对机器人控制,心理学研究,互联网、物联网实验及信息处理。`
2015-02-12 15:17:18
在未知环境中,也可以展开行动,随着机器人不断探索,路径也会时刻调整。 上述的几种算法都是目前绝大部分机器人所需要的路径规划算法,能够让机器人跟人一样智能,快速规划A到B点的最短路径,并在遇到障碍物
2018-08-24 16:56:24
我现在做这个机器人的路径规划,有一个人工势场的算法,已经用C实现算法,请问一下能否用这个labview仿真,就是给定一些起始点,终点,还有这个障碍物的坐标,中间是这个算法计算出来的一些点,能够在执行算法的时候用labview描出这些点,最终形成一条规划好的路径。
2015-04-22 16:04:32
搜索策略等规划算法,强调了轨迹规划需要考虑机器人的运动学约束。在轨迹规划中,机器人需要同时考虑最大曲率、加速度限制等物理约束,生成平滑可行的运动轨迹。强化学习在规划控制中的应用也很有创新性,通过智能体
2024-12-19 22:26:26
的轨迹规划是用关节角度的函数来表示机器人轨迹,所以在关节空间内进行轨迹规划较为简单,容易根据设计要求来对轨迹进行调整。而对于某些对于路径和姿态有严格要求的作业,如喷涂作业,就须要在笛卡尔空间内进行轨迹
2017-07-12 13:26:00
地图构建→路径规划→动态避障)等等
2. 机器人功能开发
相较于ROS入门21讲,书中更是详细书写了关于机器人的功能开发,并且十分完善,教程详尽
传感器数据处理:机器人通常配备多种传感器,如激光雷达
2025-04-27 11:24:32
,一次生成深度信息。
自主机器人定位任务的本质是对机器人自身状态的估计问题,包括位置,朝向,速度等问题。
路径规划旨在找到从起点到目标区域的路径,确保路径的可行性和最优性。路径规划方法包括变分方法,图搜
2025-01-04 19:22:08
传感器数据获取环境信息,规划路径并选择最优路径到达目的地的算法。运动控制算法是指移动机器人在到达目的地后,根据传感器数据调整方向和速度的算法。这些算法需要在移动机器人的控制器上实现,并与传感器、执行器等
2023-06-28 09:36:32
为什么我的电脑max连不上DINI机器人,搜索不到。IP地址已经改过,就是链接不上!hardware setup可以搜索到机器人
2015-05-07 16:03:22
算法构建机器人 的运动步态,之后运用六次轨迹规划算法模拟出六足动物的抬腿摆动轨迹,最后 经由运动学的求逆,运算出每个关节的旋转角,进而模拟出六足动物的运动步态。
2020-10-13 09:13:11
如何去提高汽车的主动安全性和交通安全性?从算法上解读自动驾驶是如何实现的?有哪几种常见的车辆路径规划算法?
2021-06-17 10:56:09
动态规划算法资料。
2017-08-30 20:44:12
移动机器人利用导航技术,获得机器人的目前所处的位置,结合传感器技术对周围外界环境(障碍物等)作实时探测,并根据环境提供的信息规划一条可行路径完成达到目标点的任务。移动机器人技术涉及到传感器技术
2020-11-23 15:08:52
红外遥控擂台机器人是中国教育机器人大赛擂台赛的标准竞赛平台。机器人利用前端QTI传感器探测黑色场地,避免机器人跑出场地。通过红外遥控器遥控机器人,将对手推出黑色场地。 重要技术点:场地边沿探测、红外遥控解码、超声波搜索算法、红外搜索算法
2016-03-24 10:35:37
; 洁机器人路径规划算法,实现了
2013-11-08 22:30:10
是不需要预先探明地图,机器人可以和人一样,即使在未知环境中,也可以展开行动,随着机器人不断探索,路径也会时刻调整。 以上是目前大部分移动机器人都需要的路径规划算法,而扫地机器人作为最早出现在消费市场
2018-10-10 16:29:21
1、求路径规划的代码源程序2、路径规划的学习资料(最好是基于c语言的代码学习)3、关于基于模糊神经网络的路径规划的算法的C程序的学习4、各种路径规划的学习资料也可以
2016-09-25 17:22:47
中游刃有余。D*算法的最大优点是不需要预先探明地图,机器人可以和人一样,即使在未知环境中,也可以展开行动,随着机器人不断探索,路径也会时刻调整。以上是目前大部分移动机器人都需要的路径规划算法,而扫地机器人
2017-08-01 13:50:56
和扩展都非常方便,既可以面向大学和高职学生,也可以面向中学和中职学生。重要技术点: 狭窄空间的机器人导航、循墙算法、路径规划。
2016-03-24 10:43:54
现在做毕业设计,是基于labview的挖掘机器人轨迹规划与控制,就是用labview来实现轨迹规划的编程,请教各位,这容易实现吗?该从哪入手啊?谢谢了!
2013-04-01 14:32:01
怎样去设计一种基于PID算法的巡线机器人?基于PID算法的巡线机器人有哪些优势?
2021-07-27 06:54:05
基于采样的路径规划算法,它也能抗干扰,而且消耗资源更少。 黑线规划出的所有的路径红色是连接终点和起点的路径 控制 控制就是让机器人动起来,并且动得很精准,主要包括对底盘的运动控制和电机的PID控制
2018-05-11 11:51:27
针对势场法所固有的几个缺陷,提出了一种基于势场法的移动机器人避障路径规划算法,并成功应用于未知复杂环境下移动机器人的路径规划中。仿真试验表明:提出的方法具
2009-05-27 12:59:27 30
30 为了提高家用吸尘器使用的效率,并保证安全性和可靠性,提出利用超声波传感器来测距的环境信息采集的吸尘器清扫路径规划算法。首先本文简要描述了机器人路径规划的目标,超
2009-06-26 11:42:2646 本文介绍了基于神经网络和微粒群优化算法的移动机器人动态避障路径规划算法。通过神经网络改进的微粒群算法,充分利用了神经网络的融合性和并行性来提高微粒群算法中适应
2009-07-11 08:52:3118 移动机器人是机器人技术的一个重要领域,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。动态未知环境下的移动机器人路径规划必须基于对传
2009-07-17 09:22:3318 移动机器人路径规划可分为两种类型:(1)全局路径规划;(2)局部路径规划。本文分析了Kohonen神经网络算法及其识别机理,提出了Kohonen神经网络和BP神经网络结合起来进行路径规划
2009-08-15 09:02:2913 针对移动机器人规避障碍和寻找最优路径问题,提出了在复杂环境下移动机器人的一种路径规划方法。采用了栅格法建立了机器人工作平面的坐标系,整个系统由全局路径规划和
2009-12-18 11:58:4328 人工势场法是进行移动机器人动态路径规划时常用的方法,离散控制使得一般势场力存在缺陷,对系统会产生很大的冲击,使得机器人的运动轨迹产生大幅度振荡而且杂乱无章
2010-01-20 14:00:5614 本文对基于空间数据库的移动机器人路径规划算法中引入先裁剪再检索的思想,在此基础上提出一种全新的移动机器人路径规划算法。该算法能使规划的路径成功地得到短的无碰路径,
2010-02-23 13:51:2513 本文设计了一种六轴机械臂沿空间曲线行走的控制算法。算法使机器人对输入空间曲线计算出各关节的电机控制命令使机器人沿曲线运动。算法中推导出机器人逆运动学各关节解析
2010-02-23 13:52:4549 提出一种分层路径规划算法来解决大范围海洋环境下的智能水下机器人(AUV)的全局路径规划问题。该算法将
2010-03-03 14:52:0118 路径规划技术是机器人控制技术研究中的一个重要问题,目前的研究主要分为全局规划方法和局部规划方法两大类。在对一些较有代表性的研究思想及其相关算法分析的基础上,比
2010-03-03 14:53:3839 提出一个基于插值的路径规划算法-插值 A*。此算法可以在每个栅格路径代价不一致的情况下生成一条平滑路径。由于大多数基于栅格算法规划的路径只能从一个栅格中心到另一栅
2010-03-03 14:59:2616 针对工业机器人的弧焊、切割和涂胶等应用,介绍了视觉工业机器人作业路径规划系统。描述了摄像机坐标标定方法,采用图像采集技术获取环境信息,运用图像处理技术对采集的
2010-07-08 15:40:1417 LabVIEW机器人模块-机器人选板中的特殊算法和API
概览
本教程对LabVIEW机器人模块软件自带的机器人算法进行介绍。从传感器直至路径规划
2010-03-12 11:20:092903 
小生境遗传算法的移动机器人路径优化技术
移动机器人路径规划是机器人学的一个重要研究领域,也是人工智能与机器人学的一个结合点。不论是
2010-05-17 13:45:271386 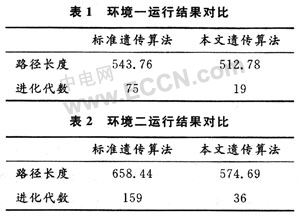
摘要$将遗传算法应用于机器人的全局路径规划#并在AS-R移动机器人上进行了实验研究% 首 先用栅格法对机器人的工作环境进行划分# 得到机器人的环境模型 其次采用遗传算法进行路径搜
2011-04-06 15:20:0672 针对现存的射门算法的不足之处,射门算法进行了改进,实现机器人射门路径的全局路径规划。首先对满足非完整约束的运动控制算法进行简要分析,在此基础上合理规划机器人射门路径上
2011-06-18 17:55:4445 针对基本蚁群算法在机器人路径规划问题中容易陷入局部最优的问题,提出了一种改进的蚁群算法,利用遗传算法加入了变异因子使最优路径产生变异,从而降低了蚁群算法陷入局部极
2012-08-29 14:48:3678 基于势场栅格法的机器人全局路径规划!资料来源网络,如有侵权,敬请见
2015-11-30 11:33:0910 基于模糊神经网络的RoboCup足球机器人局部路径规划方法研究
2016-01-04 14:59:050 移动机器人避障路径规划方法研究的论文资料。
2016-08-31 17:02:560 基于遗传算法的分拣机器人最优路径规划_文生平
2017-01-28 21:37:156 基于实时交通信息的动态路径规划算法性能比较_黄西洲
2017-03-16 10:04:380 未知环境下基于约束点的移动机器人路径规划_许重阳
2017-03-15 11:15:272 改进蚁群算法的机器人焊接路径规划_王春华
2017-03-19 11:41:391 自 50 年代世界上第一台机器人装置诞生以来, 机器人的发展经历了一个从低级到高级的发展过程。第一代示教再现型机器人, 可以根据人示教的结果再现出动作, 它对于外界的环境没有感知。在 20 世纪
2017-09-21 15:05:127 基于传统人工势场法的机器人路径规划存在障碍物附近目标不可达和局部极小点的问题。在研究该问题产生原因的基础上,提出了一种基于改进人工势场法的移动机器人路径规划算法。该算法在斥力函数中引入了机器人
2017-11-20 14:28:2515 机器人动态规划是指在某一个给定的运行空间中,移动机器人通过路径的动态规划来获得一条从初始位置到目标位置的最优路径。环境未知的情况下的机器人路径规划是该领域的研究难点。解决路径规划的主要研究方法包含
2017-11-28 17:01:360 针对移动机器人在复杂环境下采用传统方法路径规划收敛速度慢和局部最优问题,提出了斥力场下粒子群优化(PSO)的移动机器人路径规划算法。首先采用栅格法对机器人的移动路径进行初步规划,并将栅格法得到的初步
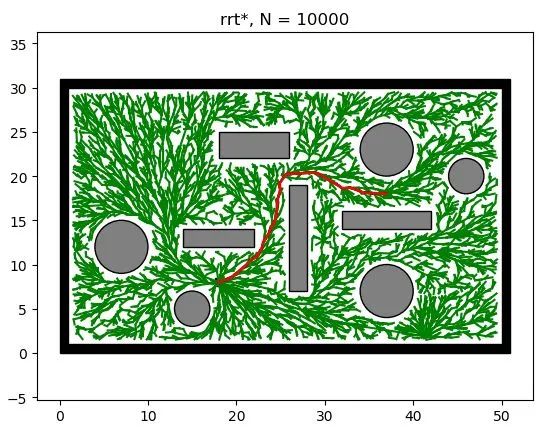
2017-11-29 15:59:060 为解决拖挂式移动机器人系统路径规划算法精准性低、稳定性差和无法考虑系统间安全性等的问题,提出一种基于路径跟踪方法的路径规划算法。该算法融合快速拓展随机树( RRT)基本算法和路径跟踪控制方程,通过
2017-12-04 14:18:306 狭隘环境下多机器人路径规划使用共享资源时,极易产生冲突,优先顺序化是解决共享资源冲突的一个重要技术。本文提出了一种基于学习分类器的动态分配优先权的方法,提高机器人团队的性能。首先机器人通过XCS优化
2018-01-08 14:35:110 路径规划在嵌入式智能机器人的研究过程中有重要的意义,随着我国科学技术的提高.机器人技术得到了广泛的发展和应用,我国智能机器人技术进步的最显著特征是嵌入式系统与机器人技术的结合.嵌入式系统具体集成度
2018-01-31 15:01:480 ,这个过程的基础所在就是路径规划。所谓路径规划是指按照一定的性能指标,机器人如何从所处的环境中搜索到一条从初始位置开始的实现其自身目的最优或次优路径。
2018-02-20 16:59:007489 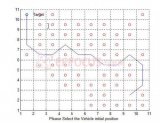
优化算法,使用节点缓存来生成一个引力函数来减少移动代价。最终的算法能够快速地生成初始路径,在规划时间内不断地改进路径且通过使用阈值来确保后面路径都比上次的移动代价更小。双足机器人仿真实验中,改进后的算法与初始的
2018-02-10 11:57:310 自主构建环境地图,具有重要的现实意义。 针对智能机器人如何以最优探测路线自主探测和构建室内环境地图的问题,提出一种基于滚动窗口的路径规划算法。将传统遍历构图的牛耕遍历方式改进为未知环境的探测策略,并结合滚动窗
2018-02-27 10:02:5018 针对机器人砂带磨抛复杂曲面叶片问题,对叶片内外型面和进排气边的磨抛路径规划及后处理技术进行了研究,对复杂曲面叶片的机器人砂带磨抛路径规划的计算效率及加T效率进行了分析,提出了一种将基于等残留高度法
2018-03-01 15:26:360 路径规划技术是扫地机器人研究的核心内容之一,机器人定位与环境地图构建就是为路径规划服务的。所谓机器人路径规划技术,就是机器人根据自身传感器对环境的感知,自行规划出一条安全的运行路线,同时高效完成作业任务。
2018-08-09 14:28:0029938 针对多 Agent 路径规划问题,提出了一个两阶段的路径规划算法。首先,利用改进的蚁群算法来为每个Agent规划出一条从起始点到目标点,不与环境中静态障碍物碰撞的最优路径。在蚁群算法的改进中引入反向
2019-04-26 16:24:0310 协同工作,机器人可更好的规划从起始点到终点的行走路径。A*与D*机器人路径规划算法介绍在实际情况中,机器人路径规划除了考虑已知环境和未知环境地图,还要考虑到动态和静态环境下的路径规划。A*(A-Star
2019-09-06 21:34:513199 有更广阔的市场空间。 在扫地机器人中,路径规划是其最核心的技术,所谓路径规划是指机器人根据自身传感器对环境进行认知,来确定周围环境和自身位置信息,进而规划出一条最优运行路线。同时又能高效完成清扫任务。 通常,移动机器人
2020-02-27 11:28:138104 自动驾驶汽车的路径规划算法最早源于机器人的路径规划研究,但是就工况而言却比机器人的路径规划复杂得多,自动驾驶车辆需要考虑车速、道路的附着情况、车辆最小转弯半径、外界天气环境等因素。
2020-03-08 17:29:0018326 近年来,移动机器人的研究受到了人们的高度重视,人们对于机器人的要求不再局限于简单的移动,而是希望机器人能够根据周围环境变化采取对应措施,做到自主移动的能力。因此,路径规划作为移动机器人的一个重要因素
2021-10-14 14:38:362933 为了提高采摘机器人自主导航和路径规划能力,提出了基于计算机视觉路径规划和RBF神经网络自适应逼近算法的导航方法。使用图像分割,平滑处理和边缘检测技术,根据图像像素灰度值确定了导航线的位置,利用
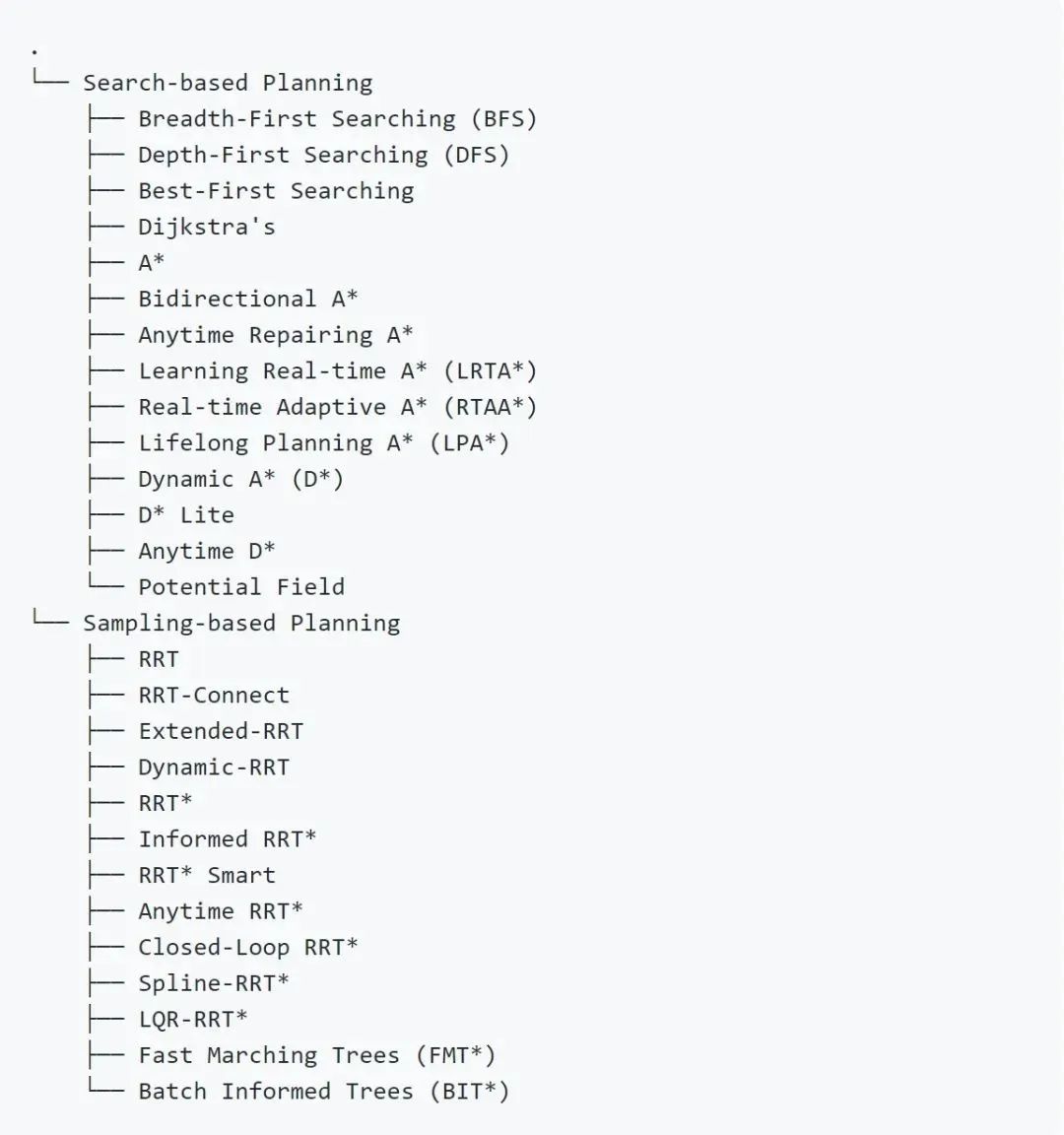
2020-08-27 14:30:0022 走机器的路,让你看一下。 在机器人研究领域,给定某一特定任务之后,如何规划机器人的运动方式至关重要。 最近,GitHub 上开源了一个存储库,该库实现了机器人技术中常用的一些路径规划算法,大部分代码
2020-11-12 18:27:242742 最近,GitHub 上开源了一个存储库,该库实现了机器人技术中常用的一些路径规划算法,大部分代码是用 Python 实现的。值得一提的是,开发者用 plotting 为每种算法演示了动画运行过程,直观清晰。
2020-12-14 13:39:412155 
近年来,移动机器人的研究受到了人们的高度重视,人们对于机器人的要求不再局限于简单的移动,而是希望机器人能够根据周围环境变化采取对应措施,做到自主移动的能力。因此,路径规划作为移动机器人的一个重要因素就显得尤为重要
2020-12-26 09:28:411379 路径规划是移动机器人导航最基本的环节,指的是机器人在有障碍物的工作环境中,如何找到一条从起点到终点适当的运动路径,使机器人在运动过程中能安全、无碰撞地绕过所有障碍物。
2020-12-26 10:49:256216 最近,GitHub 上开源了一个存储库,该库实现了机器人技术中常用的一些路径规划算法,大部分代码是用 Python 实现的。值得一提的是,开发者用 plotting 为每种算法演示了动画运行过程,直观清晰。
2020-12-28 14:25:488137 
路径规划算法是自主水下航行器(AUV)完成水下自主巡航的核心算法之一。分别综述了基于环境建模和路径搜索两类AUⅣ路径规划算法。阐述了栅格法、可视图法和维诺图法等环境建模方法的囯内外硏究现状,并指出
2021-04-09 16:01:078 农业机器人的路径规划问题,首先针对基本烟花的交互机制和选择策略做出改进,提出爆炸与迁移相结合的策略以及密度峰值火花、探测火花概念,提升烟花算法寻找最优解的能力,然后把改进烟花算法得到的最短路径作换算成蚁群算法中的信息素加强值,从而避免蚁群盲目搜索,最后采用B样条插值方法进
2021-04-16 13:55:423 自动驾驶汽车从A点行驶到B点,需要轨迹规划算法来进行全局规划,而具体都有哪些算法呢?这篇文章想和大家分享一下一类最常用的轨迹规划算法,基于图搜索的规划算法。 在开始介绍图搜索算法之前,先简单介绍一下
2021-04-25 18:02:374224 
为解决非结构化复杂场景下基于搜索的寻路算法中存在的计算时间长、路径非最优等问题,在跳点搜索( Jump pointsearch,JPS)算法的基础上,提岀一种带权重的跳点搜索( weighted
2021-05-06 16:29:2413 针对复杂环境下移动机器人自主导航易被困、路径规划不理想等问题。首先,通过改进机器人操作系统(robo‘φperating syste,ROS)中代价地图代价值衰减函数和七宫格检测法,研究了代价地图
2021-06-01 11:08:086 整理和分类,按照结果最优性的不同,多智能体路径规划算法被分为最优算法和近似算法2类。最优的多智能体路径规划算法主要分为基于A*搜索、基于代价增长树、基于冲突搜索和基于规约的4种算法。近似的多智能体路径规划算法主要
2021-06-04 11:56:434 基于元胞遗传算法的机器人路径规划技术
2021-06-29 16:12:114 嵌入式GIS中最优路径规划算法研究与实现(嵌入式开发项目经理)-嵌入式GIS中最优路径规划算法研究与实现
2021-07-30 12:49:524 A星路径规划算法完整代码资料汇总
2021-12-03 17:16:5511 机器人对未知环境的自主探索是机器人智能化的关键技术。为了提高搜索效率,作者提出了一种基于边界点优化和多步路径规划的搜索策略。他们主要对边界点优化、边界点选择、路径规划三个方面对路径规划算法进行改进
2023-06-19 10:19:152498 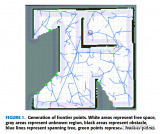
如何规划机器人的运动方式是机器人开发领域的一大课题,本文分享GitHub的一个机器人技术中常用的路径规划算法的开源库,并用动图直观演示运行过程。其中大部分代码由Python实现。
2023-10-21 09:36:242307 
路径规划算法主要可分成两种,一种是基于搜索结果的规划,另一类便是本文中将要提及的基于采样的规划。 一般而言,基于搜索的规划(如Astar)通常是运行在栅格地图上的。当栅格的分辨率越大时,算法搜索
2023-11-16 15:45:031141 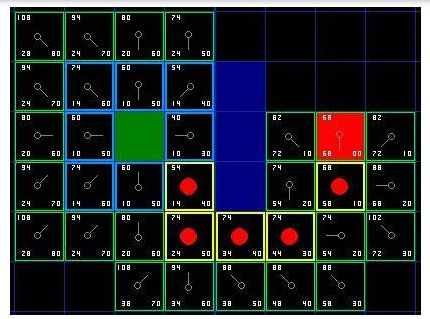
实例讲解 以下将通过一个简单的实例讲解CBS的基本过程,实例如图2所示。 图2 初始和目标状态 CBS的搜索过程如图3所示。 图3 CBS搜索过程 CBS开始时没有冲突约束,每个机器人按照各自的路径
2023-11-17 16:44:101682 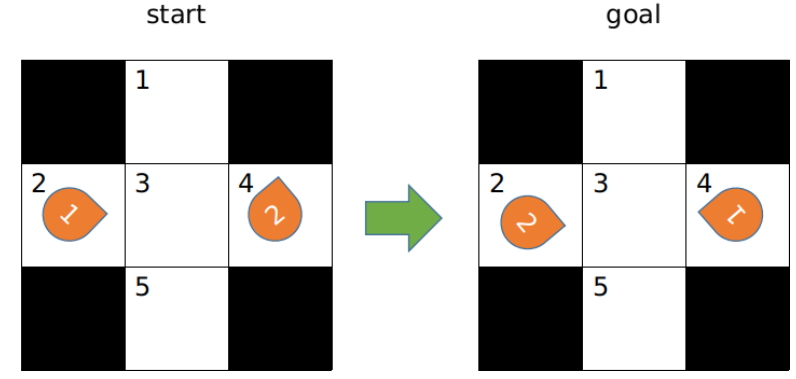
通往目的地的安全和无碰撞的路径。 路径规划问题可以分为两个方面: (一)全局路径规划:全局路径规划算法属于静态规划算法,根据已有的地图信息(SLAM)为基础进行路径规划,寻找一条从起点到目标点的最优路径。 通常全局路径
2023-11-24 15:57:312016 在工业4.0与智能制造深度融合的今天,传统路径规划算法已难以满足动态生产环境的需求。面对复杂场景下的高精度避障、实时决策与多任务协同挑战,具身智能工业机器人路径规划算法成为破局关键。作为具身智能领域
2025-03-28 15:01:53850 并非一成不变时,动态路径规划能力就显得至关重要。本文将深入探讨几种主流的动态路径规划算法(如A、Dijkstra、RRT等),并解析它们如何在AGV行业中大显身手。 为何需要动态路径规划? 1.简介 传统的静态路径规划假设环境是完全已知的
2025-06-17 15:54:401358 
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论