模块协同工作,机器人就可以很好的实现从A点到B点的智能移动了。不过实际工作环境下,上述配置还不够。因为运动规划的过程中还包含静态地图和动态地图两种情况。 A*算法 A*(A-Star)算法是一种静态
2018-08-24 16:56:24
。 超大场景下建图完整闭合过程 2.词袋模型 除了SLAM算法的升级和优化之外,现在还有很多系统采用成熟的词袋模型方法来帮助机器人完成闭环,说的简单点就是把帧与帧之间进行特征比配。 1、从每幅图像中提
2019-03-06 15:38:04
,一些企业开始纷纷投入到SLAM技术研发中,这其中也可分为两大类,一是专门提供导航定位模块的企业,另一类则是移动机器人厂商,其开发SLAM多为自用。由于国内SLAM技术起步较晚,从技术应用层面来说,目前仍处于发展阶段,但相信随着消费刺激和产业链的发展,未来SLAM技术将会更加成熟。
2018-12-06 10:25:32
)作为工具,获取地图数据,并构建地图,规避路程中遇到的障碍物,实现路径规划。跟SLAM技术在机器人领域的应用类似,只是相比较于SLAM在机器人中的应用,无人驾驶的雷达要求和成本要明显高于机器人。 无人机
2020-12-01 14:26:37
请各位大神指导,移动式机器人是怎么做EMC保护的,机器人是锂电池供电,所以就不能接大地了,那么对机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
我觉得现在是时候讨论一些更有趣的话题,今天的话题是介绍工业机器人、协作机器人和移动机器人。我想每个人都知道机器人是什么。机器人是可怕的大型机器,通常需要关在笼子中,其功能安全要求一般涉及门联锁装置
2018-10-30 11:33:11
比如说下面的文字模拟一下机器学习过程:我:昨天我喝醉了。机器人:原来,人可以喝醉。我:但我摔了一跤。机器人:摔跤是好事吗?我:是坏事。机器人:那么,人不可以喝醉。因为醉了会摔跤。……我:昨天我喝醉
2016-03-09 14:29:12
列举部分学习过程中接触的部分书籍,部分有中文版,部分有更新版本。1.机器人基础书籍适合入门的书籍:机器人学机器人建模规划与控制机器人学、机器视觉与控制——MATLAB算法基础机器人学导论——分析控制
2019-05-22 06:53:10
现在想做机器人图像识别方面的研究,有问题请教大家,比如说:现在有十种瓶子,机器人能识别我指定的瓶子,并把它从A位置移动到B位置,关键是如何识别呢,不是很清楚,求大神指点!在此感激不尽!
2019-11-04 09:02:57
想弄一个vi可以动态显示机器人的姿态,但不知道有什么函数可以引入机器人的模型,帮帮忙,谢谢。
2012-02-11 17:25:22
移动机器人有没有推荐的MCU,萌新求大佬帮助
2020-11-03 11:41:09
机器人完成实时定位与导航避障,出色完成菜品传递、来回传菜的任务。同时,工作人员还可以利用虚拟墙和虚拟轨道,帮助餐饮机器人在固定区域或固定轨迹上活动,无需额外铺设。 办公畅想一下,在办公的过程中,如果你懒得
2018-01-03 11:41:55
空间区域。其形状取决于机器人的自由度数和各运动关节的类型与配置。机器人的工作空间通常用图解法和解析法两种方法进行表示。 4、工作速度 机器人在工作载荷条件下、匀速运动过程中,机械接口中心或工具中心点在单位时间内所移动的距离或转动的角度。`
2017-08-15 14:00:52
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
再现;示教也称导引,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数/工艺参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器...
2021-09-13 08:40:55
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
的某些术语对您来说是新的,请不要担心; 我会在我们继续的过程中向你解释。使用轮子运动使用轮子的机器人的驱动几何由每个机器人的转向方式定义。 有很多选择。差速转向移动机器人最常见的方式是差动转向。 基本形式由安装在机器人两侧的两个轮子组成,如图 1 所示。 之所以称为差动转向,是因为机器人通过改变这两个
2021-09-01 08:12:28
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
2024-07-05 08:52:55
工作方式自主模式:您需要激活触摸键盘开关SW1才能在自主模式下工作。在这样做的过程中,机器人将向任何方向移动和旋转,并将独自站立。声音激活模式:机器人根据您的声音音量移动PCB+展示
2022-08-22 07:43:25
有使用labview控制移动机器人的大佬嘛,在下需要一些myrio资料的讲解,希望各位伸出援助之手,拉小弟一把,感激不尽。
2019-03-21 15:12:09
无论是传统的工业机器人系统,还是当今最先进的协作机器人(Cobot),它们都要依靠可生成大量高度可变数据的传感器。这些数据有助于构建更佳的机器学习(ML)和人工智能(AI)模型。而机器人依靠这些模型变得“自主”,可在动态的现实环境中做出实时决策和导航。
2020-08-05 07:08:21
项目名称:搬运机器人试用计划:希望申请本套件,用它来制作搬运机器人。拿到第一步,学习该主控芯片和它的库函数;第二步,学习超音波模块,直流电机和步进电机,舵机和WiFi相关知识;第三步,编写各个模块程序,调试;最后,对系统整合调试。(在试用过程中,记录自己的所感所想,分享给坛友)
2017-07-10 09:42:00
前所未有的行动能力。激光SLAM与视觉SLAM融合必将带来机器人技术和人工智能技术的真正革命,也将使得机器人从实验室和展示厅中走出来,真正服务和解放人类。RK3399Pro搭载性能超强的AI处理器
2019-07-03 10:50:01
地图构建,包括算法原理介绍、安装与配置方法、仿真环境中的SLAM以及真实机器人上的SLAM。
这一过程不仅涉及到计算机视觉和机器人学的知识,还需要对ROS 2的节点管理和数据处理有一定的了解。通过实践
2025-04-27 11:42:22
部署,详细介绍了基于颜色阈值和深度学习的巡线方法。
二维码识别则广泛应用于机器人定位与任务触发,例如AGV(自动导引车)的路径规划。
深度学习在机器人视觉中的崛起
书中重点介绍了YOLO目标检测和深度学习
2025-05-03 19:41:47
引入GPT这样的大模型后,情况发生了根本性的变化。只需提供适当的提示词以及封装好的机器人函数库,大模型便能灵活地生成控制代码,极大地简化了开发过程,并提高了自动化水平。
此外,大模型凭借强大的推理能力
2024-12-29 23:04:07
发展。在前两篇文章中,我们介绍了移动机器人的基本概念和硬件组成。本文继续深入探讨移动机器人的自主导航系统及上位机软件****设计与实现。
01移动机器人的内载算法
为了实现移动机器人在未知环境的自主
2023-06-28 09:36:32
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
机器人不都是程序所控制的?所有的信号通过传感器集中到终端通过程序统一处理???
2016-09-20 21:11:47
。这种机器人还可以接受示教而完成各种简单的重复动作,示教过程中,机械手可依次通过工作任务的各个位置,这些位置序列全部记录在存储器内,任务的执行过程中,机器人的各个关节在伺服驱动下依次再现上述位置,故这种
2015-01-19 10:58:38
工业机器人的四大特征是哪些?工业机器人是由哪些部分组成的?工业机器人是怎样进行划分的?
2021-10-11 09:10:17
、功率放大器、数码摄像机。实验过程:旋转软体机器人的实验研究:在旋转软件机器人的转速测量实验中,功率放大器将信号发生器发出的激励信号进行放大,然后激励信号施加在机器人上。为了测量机器人的旋转角度,在
2021-04-09 10:02:13
、功率放大器、数码摄像机。实验过程:旋转软体机器人的实验研究:在旋转软件机器人的转速测量实验中,功率放大器将信号发生器发出的激励信号进行放大,然后激励信号施加在机器人上。为了测量机器人的旋转角度,在
2021-04-14 09:56:50
`华南机器人应用培训中心拥有各种设备,开展各种不同的机器人培训班。打造各种工业现场常见的机器人工作站,现开展KUKA、发那科、三菱、ABB、爱普生工业机器人培训对外招生。 一、认识机器人技术:工业
2015-09-02 14:03:18
的关键。 SLAM问题可以描述为:机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和传感器数据进行自身定位,同时建造增量式地图。在SLAM中,机器人利用自身携带的传感器识别未知环境中
2017-09-21 14:26:44
题目:基于SLAM的移动机器人设计嵌入式PPT应具有的几个部分1、有哪些硬件 1)小车 2)STM32F429开发板 3)树莓派3b+开发板 4)4g通信模块 5)GPS模块 6
2021-11-08 06:17:14
研究了一种用FPGA技术实现三轮全方位移动机器人运动控制系统的方法,与双DSP结构,DSP+CPLD结构,以及DSP+专用集成电路结构等相比,该方法具有简单可靠,扩展性强等特点。且FPGA设计简单,使用方便,开发周期短,能够实现真正的SOPC系统。
2019-10-22 07:35:19
自主式移动机器人系统是指根据指令任务及环境信息进行自主路径规划,并且在任务执行过程中不断采集局部环境信息,做出决策,从而实现安全行驶并准确到达目标地点的智能系统。本文以LPC2119为控制核心,介绍
2020-05-11 06:39:04
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
2023-09-20 06:24:09
嵌入式系统开发与应用——基于视觉的机器人SLAM入门实践1一、OpenCV的安装与配置1. 下载OpenCV3.4.1并解压到ubuntu相应目录上2. 下载安装依赖库和编译工具cmake(1)更新
2021-12-16 08:16:12
校正装置。【背景技术】[0002]电阻点焊由于在生产过程中能量高度集中、板材变形小、生产效率较高,因此点焊特别适合于薄壁零件的焊接,在车身焊接中得到广泛应用。车身点焊机器人在焊接过程中,其焊接路径是控制程...
2021-09-02 08:36:52
在地图构建之后,下一步要考虑的就是如何保存地图,便于下次开机直接使用,省时省力省心 ~ 如何保存地图 RoboStudio与机器人连接之后,在机器人扫图的过程中,RoboStudio将实时从
2019-01-28 17:27:40
人可以有自我学习的技能,而机器人只能被灌输既定的知识吗?如何实现机器人的自我学习?考虑一个罐子,里面装着橙色和绿色的弹珠。如何估计里面的橙色弹珠比例?一种方法是抽样。如果样本大小为N,样本中橙色弹珠
2016-03-04 10:34:38
移动机器人利用导航技术,获得机器人的目前所处的位置,结合传感器技术对周围外界环境(障碍物等)作实时探测,并根据环境提供的信息规划一条可行路径完成达到目标点的任务。移动机器人技术涉及到传感器技术
2020-11-23 15:08:52
文章目录1. sw_urdf_exporter插件2. 如何导出移动机器人URDF模型想必搜索这个方法的童鞋们对SolidWorks应该再熟悉不过了吧,首先分享一个我一直在用的公众号
2021-08-30 07:28:07
移动机器人是机器人的重要研究领域,人们很早就开始移动机器人的研究。世界上第一台真正意义上的移动机器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它装备了
2020-05-14 08:15:00
将Simulink模型与Lego机器人结合使用可提供令人愉悦的基于模型的设计体验支持LEGO MINDSTORMS NXT作为产品标准功能。即使没有ECRobot NXT,您也可以玩乐高游戏
2021-12-20 07:15:51
,从而最大限度地提高运输过程中的负载稳定性。码垛有三种主要类型:内联或层成型,卸垛或卸载,混合箱体。切割:由于其危险性,激光,等离子和水射流切割机经常与机器人一起使用。数百个不同的切割路径可以编程到
2017-09-07 17:20:32
现在广泛应用的焊接机器人都属于第一代工业机器人,它的基本工作原理是示教再现。示教也称导引,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数
2017-12-15 10:25:19
,而是更多地融入了机器视觉、机器听觉、机器触觉、移动机器人的自主定位等新技术和新方法;也不再局限于一些理论层次上的分析,而更多的是以实际应用为主,在实际工作中扮演生产者的角色,在生活中发挥生活助手
2015-02-03 10:51:09
差速移动机器人轨迹跟踪控制方法一、引言二·、基础准备1.去除GPS数据中的坏点2.经纬度与平面坐标系转换3.差速移动机器人数学建模三、基于PID的差分移动机器人轨迹跟踪方法1、控制律设计2、航向角
2021-09-01 08:41:30
毕业设计——球上平衡机器人前言本次毕业设计过程中,受到过许多人的帮助,收获良多,在此将机器人整体开源,同时总结一下机器人搭建过程中遇到的坑和未来的改进方向。一、机器人原理分析首先来看成品图如图所示
2021-08-17 08:44:42
卡尔曼滤波方法估计目标的空间位置和运动参数。 1 目标成像的几何模型 移动机器人视觉系统的坐标关系如图1 所示。 其中O-X Y Z 为世界坐标系; O c - X cY cZ c 为摄像机
2019-06-01 08:00:00
大家应该都知道天津博诺移动机器人的比赛请问手柄控制机器人的程序框图是什么包括子vi可否分享一下求大佬。
2017-12-17 10:27:34
关于ros智能机器人,就是一个写智能机器人代码的一个虚拟机,
2021-10-13 19:20:16
一.机器人导航算法工程师岗位职责:1. 负责机器人视觉或激光雷达的SLAM算法的研发和优化;2. 负责机器人自主导航定位算法的研发,主要包括基于深度相机或激光雷达、IMU、里程计等多传感器信息融合
2020-06-08 05:06:44
SLAM后,要进行一个叫做目标点导航的能力。通俗的说,就是规划一条从A点到B点的路径出来,然后让机器人移动过去。 要实现这个过程,运动规划要实现至少两个层次的模块,一个叫做全局规划,这个和我们车载
2018-10-10 16:29:21
求助,,,当安川机器人运行过程中突然按下示教器上停止按钮时然程序指针调到程序第一步(NOP步)执行程序应该怎么编写?
2017-12-02 01:32:49
。这里所需的基础能力就是路径规划,也就是一般在完成SLAM后,要进行一个叫做目标点导航的能力。通俗的说,就是规划一条从A点到B点的路径出来,然后让机器人移动过去。要实现这个过程,运动规划要实现至少两个
2017-08-01 13:50:56
SLAM主要解决机器人的实时定位与自动建图问题,那么,在实际应用时,SLAM究竟是如何实现的呢?在实现过程中有哪些难点?这是一个完整的SLAM和导航系统的主要架构图:其中,SLAM核心过程包括3个
2017-06-30 15:05:26
SLAM(同步定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。目前,SLAM 的主要应用于机器人、无人机、无人驾驶、AR、VR 等领域。其用途包括传感器自身的定位,以及后续的路径规划、运动性能、场景理解。
2020-05-20 08:19:40
机器人定位导航中,目前主要涉及到激光SLAM与视觉SLAM,激光SLAM在理论、技术和产品落地上都较为成熟,因而成为现下最为主流的定位导航方式,在家用扫地机器人及商用送餐机器人等服务机器人中普遍采用了...
2021-07-05 06:41:57
什么是激光SLAM?激光SLAM技术在机器人运动控制系统中的应用是什么?
2021-07-30 06:37:25
的合作。公司致力于各类移动机器人产品的研发与销售,如餐饮机器人,巡检机器人,安防机器人等各类移动机器人。公司致力于为工厂以及物流仓储行业提供无人化、智能化的设备,如各种不同应用场景的AGV,包括
2017-06-10 14:24:17
焊接机器人的原理:焊接机器人是一种高度自动化的设备,焊接机器人的基本工作原理是示教再现,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数
2020-11-16 16:18:45
会有消极怠工的现象。 第三:与流水线配合得十分紧密 在包装布匹的过程中,通常要使用叉车、布包输送机、码垛机器人、纵向打包机等一系列先进的设备,尤其值得注意的是,在这个流水作业中,要使用两个码垛机器人
2016-01-20 14:09:40
等功能,让机器人提供更好的自主定位导航服务。 | 实时存储地图数据 建图优化引擎是SLAM 3.0 的一部分,具有实时存储地图数据的能力。在建图的过程中地图数据始终存在于建图中心或者移动端内存里
2019-01-21 10:57:46
什么是移动机器人软硬件系统问题?移动机器人软硬件系统有哪些问题呢?
2021-11-11 06:07:42
机器人怎么实现前后左右的移动?
2021-10-08 09:21:23
怎么设计一种室外移动机器人组合导航定位系统?如何实现室外移动机器人组合导航定位系统的硬件设计?如何实现室外移动机器人组合导航定位系统的软件设计?
2021-04-19 10:50:33
、餐饮服务行业已经应用到了机器人。不过目前,移动机器人都是使用高质量的机载可充电蓄电池组来给自身供电,但是一般只能维持几个小时,一旦电能耗尽,必须采用人工干预的方式来给机器人充电。如果采用人工充电,那么
2016-01-20 09:39:06
3D地图中,也是靠这种方法定位。 无人车激光雷达生成定位地图那万一机器人走进沟里、爬树上了怎么办?我们也有对策。平面中,常用二维栅格地图,地图会被切成一个个小格。 我们可以用“0”和“1”来表示这个
2018-05-11 11:51:27
我是新人,求帮助啊,明天需要提交轮式机器人应用的报告,求大神给点建议,可用轮式机器人应用于那些方面,要求实际可行,应用于生活,农业,军事都可以,谢谢啦
2013-04-17 16:32:16
【摘 要】以嵌入式运动控制体系为基础,以移动机器人为研究对象,结合三轮结构轮式移动机器人,对二轮差速驱动转向自主移动机器人运动学和动力学空间模型进行了分析和计算,研究和设计了自主移动机器人电机驱动
2025-06-11 14:30:14
运行伺服时模组移动过程中声音很大的原因是什么?怎么解决?
2021-10-08 08:45:39
公司的酷卡机器人有一个调零的程序,就是把机器人移动靠近到防护围栏上的一个传感器,直到触发传感器动作。在机器人发生碰撞后就提示要求调零,但一直没搞明白这样做目的是什么,希望知道的朋友指点一下。
2015-01-14 14:35:30
MRC3100系列AMR移动机器人控制器,适用潜伏顶升式、协作(复合)式、辊筒式等差速底盘类型移动机器人,内置激光导航及二维码导航算法,支持差速底盘运动模型。MRC3100系列自带丰富的I/O资源
2023-07-11 10:12:02
产品介绍 ABB机器人产品线丰富,包括多关节机器人、协作机器人、喷涂机器人、SCARA机器人以及自主移动机器人(AMR)等多关节机器人:ABB的多关节机器人是六轴关节型
2024-09-30 17:56:07
实现应用. 工作流程为:1) 收到充电指令后, 天轨搭载机器人移动到对应的充电桩, 移动过程中3D智能相机侦测移动前方是否有障碍物, 3D相机侦测充电枪
2025-07-07 08:47:04
文中阐述一种移动机器人SLAM问题的解决方法,首先利用激光测距仪得到环境中障碍物的监测图表,然后增量的构建全局地图。利用扩展卡尔曼滤波器(EKF)创建移动机器人定位计算的有
2012-02-01 14:57:54 144
144 本论文主要介绍是以单片机ATmega16为智能控制系统核心,在移动的机器人系统中应用光感传感器实现机器人对障碍物的一系列行为;通过红外传感器实现机器人在移动过程中对黑色胶条的寻线,转弯的过程。
2016-09-26 14:42:42 1409
1409 
移动机器人的定位和地图创建是自主移动机器人领域的热点研究问题。对于已知环境中的机器人自主定位和已知机器人位置的地图创建已经有了一些实用的解决方法。然而在很多环境中机器人不能利用全局定位系统进行定位,而且事先获取机器人工作环境的地图很困难,甚至是不可能的。
2017-11-10 14:49:022236 针对复杂环境下机器人的同时定位与地图构建( SLAM)存在实时性与鲁棒性下降等问题,将一种基于ORB特征点的关键帧闭环检测匹配算法应用到定位与地图构建巾。研究并分析了特征点提取与描述符建立、帧间配准
2018-03-26 10:57:326 要想解决机器人智能移动这个问题,除了要有SLAM技术之外,还需要加入路径规划和运动控制。在SLAM技术帮助机器人确定自身定位和构建地图之后,进行一个叫做目标点导航的能力。通俗的说,就是规划一条从A点到B点的路径出来,然后让机器人移动过去。
2018-08-27 09:36:003476 实现移动机器人安全高效的运行,离不开导航系统和转向驱动系统的通力合作。移动机器人在运动行驶过程中需要用转向驱动装置来控制它的运动方式。
2019-08-20 09:31:482799 当前定位及清扫情况,在建立好的地图基础上进行实时更新。看完上面的例子,我们再回到SLAM的定义上,SLAM就是机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的地图特征(比如,墙角,柱子等
2019-09-17 20:16:144051 在某社交平台,一篇题为“自主移动机器人真的需要SLAM吗“的问答,引起了大家的热议。 有人认为机器人确实是需要SLAM的,但目前流行的SLAM项目还不够,机器人更需要符合其特色的SLAM方法
2019-12-13 13:47:222916 SLAM技术作为机器人自主移动的关键技术,让很多人都误解为:SLAM=机器人自主定位导航。
2020-03-30 10:39:113343 自主导航是移动机器人自动运行的一种关键技术,目前最主流的导航技术是SLAM(simultaneous localization and mapping)的方式,中文意思是”即时定位与地图构建“,其
2020-07-28 11:26:113212 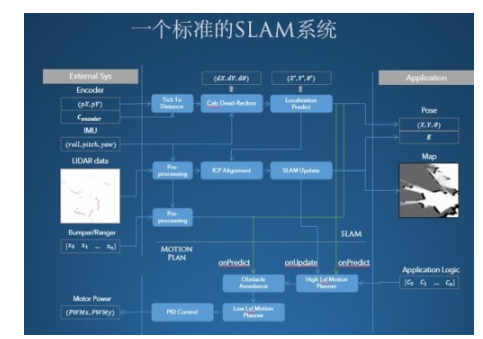
本文档的主要内容详细介绍的是概率机器人的资料文档合集。
2020-11-16 08:00:003 SLAM问题可以描述为: 机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现机器人的自主定位和导航。
2021-04-18 10:15:205956 
在单目视觉同步定位与建图(SLAM)过程中,由于特征匹配阶段存在误匹配且耗时长,使得机器人初始化速度慢、定位精度不髙。针对此问题,基于概率运动统计特征匹配,提出一种单目视觉SLAM算法。通过设置
2021-05-27 14:25:546 构建,或并发建图与定位。问题可以描述为:将一个机器人放入未知环境中的未知位置,是否有办法让机器人一边逐步描绘出此环境完全的地图,同时一边决定机器人应该往哪个方向行进。例如扫地机器人就是一个很典型
2021-10-13 10:38:383047 正如图中所示,机器人自主定位导航技术中包括:定位和地图创建(SLAM)与路径规划和运动控制两个部分,而SLAM本身只是完成机器人的定位和地图创建,二者有所区别。
2023-08-03 11:12:001660 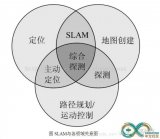
的细节,先来找link和joint,看下这个机器人是由哪些部分组成的,了解完全局之后,再看细节。 创建机器人模型 好啦,讲了这么多,还是要看一个完整的示例。 我们以这款移动机器人模型为例,一起看下它的URDF建模过程。 功能包结构 机器人的模型放置在learning_u
2023-11-22 17:09:531973 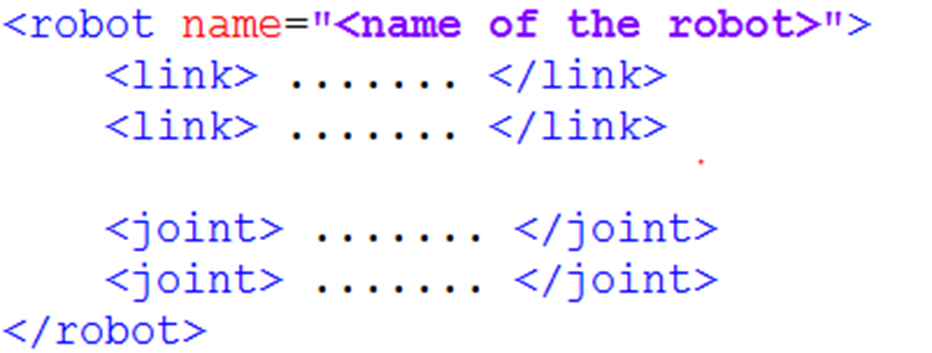
机器人运动学中的运动学约束是指机器人在运动过程中受到的限制,包括位置、姿态、速度和加速度等因素。这些约束会对机器人的自由度产生影响,从而影响机器人的运动和控制。运动学约束通常用数学模型来描述,为机器人的运动控制提供了理论基础。
2024-01-18 16:45:244283 
 电子发烧友App
电子发烧友App












 工商网监
工商网监
评论