随着科学技术的不断进步,未来3D视觉系统将成为机器人系统的标准附加设备,携手机器人共同打造梦幻般视觉。
2013-05-14 11:57:29 4871
4871 3D视觉技术作为新兴的技术领域还存在很多亟待解决的问题,但2D视觉已不能满足空间抓取的应用要求。与2D视觉相比,3D视觉技术的优点有哪些?
2023-05-15 15:23:211456 
3D图形控件设置并联机器人(如Delta机构)各两件间的对象关系,怎么设置啊有没有人知道啊?目前见到的都是串联型机构。
2020-03-28 21:42:43
请各位大神指导,移动式机器人是怎么做EMC保护的,机器人是锂电池供电,所以就不能接大地了,那么对机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
labview 视觉机器人抓取工件 CCD相机的二维坐标系的建立?希望分享,谢谢
2017-08-18 20:53:37
列举部分学习过程中接触的部分书籍,部分有中文版,部分有更新版本。1.机器人基础书籍适合入门的书籍:机器人学机器人建模规划与控制机器人学、机器视觉与控制——MATLAB算法基础机器人学导论——分析控制
2019-05-22 06:53:10
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
安静高效的机器人正在接管——阻止它们已经太迟了。不,这不是机器人世界末日另一个可怕的故事。这是关于您下一设计硬件预算和规划面临威胁的问题。虽然您无法阻碍技术变革,但是您可以预测其影响。
2019-07-17 08:08:16
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
机器人路径规划学习者一枚,谁了解现在最新的路径规划方法及实现,求指教,不胜感激啊。。。。。。。。。。。
2013-09-03 21:15:09
有人会用labview调用python吗,或者有其他方法能实现这个要求?我在labview做了一个磁场发生的程序,驱动磁机器人运动,而且我这个机器人是绕着一个向量旋转向前的,就输入幅值频率那些就可以
2022-11-18 16:21:25
基于soildwork绘制的3D机器人模型,要求实际的机器人在运动时,将3D的模型加载在LABVIEW中,与实际机器人同步动作,做运动演示。
2013-02-28 16:51:41
将系统分为算法实现和仿真模块、DSP控制模块、及机器人驱动模块,以验证算法的有效性。
KUKA KRAGILUS工业机器人的实体控制测试:最终,项目工业机器人的实体控制。在LabVIEW建立的3D仿真
2023-12-21 20:03:18
`1、 教学领域:1) 计算机:可用NAO机器人验证代码,编写相关程序,以及3D仿真与实体之间的逻辑关系;2) 自动化:研究个体和多机器人控制,以及多种传感器信息融合;3) 机械:机械结构设计
2015-02-12 15:17:18
和即时定位问题,而自主导航需要解决的是智能移动机器人与环境进行自主交互,尤其是点到点自主移动的问题,这需要更多的技术支持。 要想解决机器人智能移动这个问题,除了要有SLAM技术之外,还需要加入路径规划
2018-08-24 16:56:24
描述此参考设计由 QVGA 分辨率 3D 飞行时间 (ToF) 传感器 OPT8241 和 ToF 控制器 OPT9221 组成,展示了 TI 3D ToF 解决方案在扫地机器人的类似配置和环境下
2018-10-11 15:37:51
我现在做这个机器人的路径规划,有一个人工势场的算法,已经用C实现算法,请问一下能否用这个labview仿真,就是给定一些起始点,终点,还有这个障碍物的坐标,中间是这个算法计算出来的一些点,能够在执行算法的时候用labview描出这些点,最终形成一条规划好的路径。
2015-04-22 16:04:32
集中于串联式的工业机器人的理论与工程应用。虽然串联机器人具有诸多优点,但同时也有些问题函待解决。本文介绍了一种新型的串并联喷涂机器人的结构设计,并对其运动学、误差建模、误差补偿和轨迹规划进行了分析
2017-07-13 16:03:16
,正在选取合适的AI加速系统,工业用品,有小巧,稳定,成本等方面考虑,正在选型。 ④项目开展,按时间计划实施。⑤项目调试,优化,分享。 预计成果 完成基于机器视觉的工业机器人抓取工作站,并拿出基于机器视觉的工业机器人抓取路径规划方案的典型应用作为核心技术,加以推广。
2019-09-18 14:18:14
项目名称:机器人试用计划:1.熟悉开发板2.将开发板试用过程写成帖子分享出来3.将板子加入到已经做好的3d打印机器人中,实现控制。分享控制方法
2017-05-23 14:26:43
,一次生成深度信息。
自主机器人定位任务的本质是对机器人自身状态的估计问题,包括位置,朝向,速度等问题。
路径规划旨在找到从起点到目标区域的路径,确保路径的可行性和最优性。路径规划方法包括变分方法,图搜
2025-01-04 19:22:08
过程③本项目已经初具雏形,正在选取合适的AI加速系统,工业用品,有小巧,稳定,成本等方面考虑,正在选型。④项目开展,按时间计划实施。⑤项目调试,优化,分享。预计成果完成基于机器视觉的工业机器人抓取工作站,并拿出基于机器视觉的工业机器人抓取路径规划方案的典型应用作为核心技术,加以推广。
2019-09-18 19:24:11
Rooma系列扫地机器人在清洁领域有了很长时间的发展,不过他们还不满足于此。近日,iRobot公司表示公司将在机器人上安装3D传感器,为用户提供更加智能的使用体验。通过3D传感器,机器人可以更清楚地
2014-04-25 15:03:19
Rooma系列扫地机器人在清洁领域有了很长时间的发展,不过他们还不满足于此。近日,iRobot公司表示公司将在机器人上安装3D传感器,为用户提供更加智能的使用体验。通过3D传感器,机器人可以更清楚地
2014-04-25 15:05:09
随着很多全新技术的涌现,人们越来越需要用3D方法来表示现实世界中的物体。特别是机器视觉和机器人技术,它们都得益于精确和自适应的3D捕捉功能。其它针对3D扫描的应用包括生物识别、安防、工业检查、质量
2022-11-16 07:48:07
我今年大一计算机专业 想做那种清理垃圾机器人带机械手臂的。。正在放寒假想学点东西准备一下但网上说的太笼统 而且网络普遍都一样的所以想请教一下 各位高机器人的我应该从何学起 我们就算是一个队伍吧一共8
2016-01-19 13:44:49
《先进机器人控制》从控制的角度系统地介绍了机器人学的基础知识和当前的发展状况。全书共分为12章,由基础篇、控制结构篇和先进控制篇构成。基础篇着重介绍串联关节机器人的运动学、运动规划和动力学。其中
2017-09-19 15:30:57
对机器人技术有更加深入的认识和了解以及实际操作能力得到较大提高,具备机器人行业公司及相关单位对从业人员的技术条件要求。 3、工业机器人专业人才稀缺,就业优势明显。本专业人才全部依赖机器人厂商内部培训
2015-09-02 14:03:18
`这是创客集结号的作品四足机器人身体和四足都是通过3D打印技术打印出来的,通过自己安装连接上超声波传感器,制作成功的四足机器人完全就很了。`
2018-09-29 09:55:09
描述AR.LO - Arduino 3D 打印机器人AR.LO 是一款基于 Arduino 的 3D 打印 2 轮机器人。它具有:OLED 显示屏、超声波传感器、蓝牙模块和 2 个改进的伺服电机
2022-08-12 07:55:16
关于ros智能机器人,就是一个写智能机器人代码的一个虚拟机,
2021-10-13 19:20:16
跟踪等领域。不同种类的机器人由于工作的重点不一样,它的视觉系统在软件或硬件上都有着细微的差别。本文研究基于服务机器人的单目视觉系统。它处理的是二维图像,是基于对无遮挡物体颜色和形状的识别以及3D目标物体的平动跟踪。
2020-04-07 07:27:24
视觉系统的发展趋势怎么样?3D视觉系统应用在哪些方面?未来的机器人3D视觉系统将会发生什么样的变化?
2021-05-11 06:40:14
导读: 物联网、增强现实(AR)、3D打印和机器人技术,曾经只能在科幻电影里看到的黑科技,正在逐渐走进我们的生活。由口袋妖怪到AR红包,越来越多的新技术在不断走进我们的生活!似乎每过一天,新技术就变
2017-10-19 09:18:04
现在做毕业设计,是基于labview的挖掘机器人轨迹规划与控制,就是用labview来实现轨迹规划的编程,请教各位,这容易实现吗?该从哪入手啊?谢谢了!
2013-04-01 14:32:01
` 本帖最后由 dfood 于 2015-2-13 16:41 编辑
自己做的3D打印机器人`
2015-02-13 16:17:33
以软体机器人为背景和主题,深入讲解:(1) 软体机器人的关节设计方法;(2) 有限元分析技巧;(3) 力学模型的建立方法; (4) 基于MATLAB与视觉识别技术的软体手柔性抓取控制与实验等内容
2019-08-12 15:09:17
泰科关节机器人具备哪些优势? 一、编程简单可以让无编程经验的操作人员能快速设置和操作我们的直观、3D 可视化协作式机器人。只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏
2023-04-19 15:13:28
在应用径向基函数RBF(Radial Basis Function)神经网络对机器人进行轨迹规划时,为解决一般学习算法中收敛速度慢、学习精度不高的问题,提出一种混合学习算法。该方法根据轨迹规划
2010-12-31 17:17:51 18
18 实现应用. 工作流程为:1) 收到充电指令后, 天轨搭载机器人移动到对应的充电桩, 移动过程中3D智能相机侦测移动前方是否有障碍物, 3D相机侦测充电枪
2025-07-07 08:47:04
产品简介经世智能3C电子行业物料转运复合机器人,复合机器人在3C电子行业聚焦物料转运与仓储管理、精密设备上下料、装配站机台上下料等应用场景。机器人机械臂末端可定制末端夹具,车身可定制物料缓存架
2025-08-13 13:53:28
针对J ava 3D 中虚拟机器人的树状结构特点,提出一种由机器人运动学导出的矩阵变换方法,使机器人左、右脚均可动态地成为树状结构的根结点. 根据该方法编写的虚拟机器人驱动程序,并
2011-06-27 18:04:2754 基于模糊神经网络的RoboCup足球机器人局部路径规划方法研究
2016-01-04 14:59:050 最近两天参观了华为的自动化工厂,了解到机器人抓取在工业中的应用以及未来的前景,备受鼓舞。作为一个搞机器人抓取(grasping)接近八年的老grasper,觉得还是可以写写机器人抓取的前世今生的。也
2017-09-20 09:21:313 机器人动态规划是指在某一个给定的运行空间中,移动机器人通过路径的动态规划来获得一条从初始位置到目标位置的最优路径。环境未知的情况下的机器人路径规划是该领域的研究难点。解决路径规划的主要研究方法包含
2017-11-28 17:01:360 Wall-E瓦力机器人3D图纸
2018-04-17 11:48:4950 3D time-of-flight 概览:3D TOF机器人障碍检测,防撞和导航
2018-08-10 00:04:004566 3D TOF应用探讨:3D TOF 机器人导航应用
2018-08-08 01:39:004773 这两年来,在自动化行业里面,工业机器人发展速度很快,大家非常熟系的一个词叫“机器视觉”,它分为2D和3D,3D视觉多了一层深度分析系统。从重点工业到一般工业,随着机器人换人的推进,目前正在呈现多样化的发展。
2018-09-04 11:19:0910604 根据国外媒体的报道,研究人员最近研发出一款新型机器人,该款机器人可以迅速抓取任何不规则形状的物体。该款被命名为Dex Net 2.0的敏捷机器人,深入的研究了虚拟图书馆数据库中10000个具备
2018-10-09 08:58:581897 工业机器人作为我国工业发展的重要支撑,如今在制造和物流等领域的应用越来越广泛,而3D视觉作为工业机器人的“眼睛”,已成为影响工业机器人领域应用和性能的关键因素。如何通过3D视觉控制技术来提高
2018-12-03 14:17:004433 近日,北卡罗莱纳州立大学的研究人员发明了3D打印的柔性网状机器人,因其柔软的外形,又叫做软机器人。这种软机器人的结构可以通过施加磁场来控制,从而漂浮在水面上。它们可以在水面上抓取小物体,所以有潜力模仿生活在水面上的生物。
2019-01-25 10:28:123406 近日,北卡罗莱纳州立大学的研究人员发明了3D打印的柔性网状机器人,因其柔软的外形,又叫做软机器人。这种软机器人的结构可以通过施加磁场来控制,从而漂浮在水面上。它们可以在水面上抓取小物体,所以有潜力模仿生活在水面上的生物。
2019-01-25 10:28:18854 据报道,当你想到机器人时,你可能没有联想到可以漂浮在水面上的弹性网状物,但这正是北卡罗来纳州立大学的研究人员所开发的。这些柔软的结构是3D打印的,并嵌入了磁性颗粒,可以拉伸和压缩以抓取和移动小物体。
2019-01-25 10:58:491579 麻省理工使用3D打印来构建“折纸”机器人抓手
2019-03-20 14:16:525717 了解如何将3D深度传感器配置为机器人周围的3D虚拟防护幕,从而提高机器人操作人员的安全。
2019-08-02 06:16:002186 然而,提供3D深度讯息的新型传感器,如3D飞时(TOF)镜头、3D光达和立体视觉镜头,可更准确地检测和定位对区域的入侵。若守卫机器人的3D系统在几公尺之外检测到人的腿,它将允许机器人继续操作,直到对方实际伸出其手臂朝向机器人为止。
2019-04-19 15:02:144381 MIT科学家团队设计了一种基于3D打印的磁性软体机器人,通过一个游戏手柄,就能控制该机器人“跳”“滚”“爬”,各种功能可以通过编程来实现。
2019-06-20 09:29:263772 本文主要研究3D视觉技术在机器人抓取作业中的应用,总结了3D视觉技术在识别、定位物体时面临的挑战,给出了抓取作业机器人3D视觉系统的设计方法。
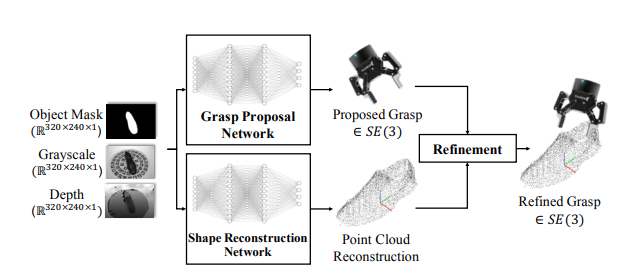
2019-07-25 08:43:109251 如果机器人要拿起一个物体并将其放进一个容器里。首先,机器人需要观察物体,在6D空间中决定抓取器的移动位置。
2020-03-02 09:25:481163 机器人能提高产业效率,也会挤压劳工就业机会,导致不同立场团体论战,本来大家都同意引进机器人的产业,仅限于日本称为3K、欧美称为3D的产业:肮脏(Dirty)、危险(Dangerous)、辛苦(Difficult)。
2020-06-13 12:19:081748 UCSD研究团队采用3D打印技术,制作柔软有弹性的机器人,称为柔软外骨骼,可望促进软件机器人普及应用。
2020-06-13 12:33:023524 这次开发的方法论首先以人身体等生物模型为基础,制造了软体的CAD模型文件。接着使用者在CAD文件中指定软体机器人主要关节的动作和运行方向。之后利用高速计算机算法将CAD文件构造成3D的软体机器
2020-08-14 10:16:151537 传感器-机器人标定的目的是建立传感器坐标系与机器人坐标系之间的联系。这种转换是将位于3D点云中的零件坐标(即传感器坐标)转换为机器人可以通过其运动/编码器子系统(机器人坐标)执行拾取的位姿数据。
2020-09-18 16:34:074009 随着3D打印,4D打印和超材料的使用通过全球研究而继续扩大,通过诸如数字制造等更先进的技术,软机器人技术也变得越来越有可能,从而带来了包括仿生软机器人,集成致动器和机器人在内的各种创新。甚至游泳柔软的机器人。
2020-09-18 17:09:503226 传感器与机器人紧密集成,从而基于从3D扫描数据得出的智能运动实现许多动态制造过程。 机器人配置智能3D传感器的方法 常用的方法有两种,一是安装在框架上,二是安装在机器人上。 1.安装在框架上 在机架安装系统中,传感器处于与机
2020-10-16 09:58:212844 智能传感器与机器人紧密集成,从而基于从 3D 扫描数据得出的“智能”运动实现许多动态制造过程。 机器人配置智能 3D 传感器的方法 常用的方法有两种,一是安装在框架上,二是安装在机器人上。 1. 安装在框架上 在机架安装系统中,传感
2020-10-30 05:18:081123 图漾科技发布新款3D工业相机:FS820,小型化设计专为协作机器人Eye-in-Hand场景优化、助力手眼协作的大规模普及化应用。图漾科技全新发布新款3D工业相机FS820,在精度、RGB画质、产品
2020-11-09 11:38:513101 中国天津大学的科学家开出了可3D打印的自定义机器人,该机器人能够实时缩放,监视细小的管道。并且单件设备具备软化和模块抓手,使其可以灵活的在奇异的形状中灵活运动。解决了在一些奇异管道中机器人无法灵活行动的问题。
2021-01-11 09:28:382652 3D打印制造的出现,改变了原有的制造方式,3D打印由于其快速加工,个性化制造和能加工复杂结构的特点,被越来越多的使用到加工机器人的行业中,下面悟空打印坊3D打印就来为大家介绍3D打印水下机器人,快速实现无人潜艇制造。
2021-01-11 10:10:193547 3D打印技术在我们日常生活中的应用是越来越多了,而3D打印的机器人大家了解吗?普渡大学研发出12克重的蜂鸟机器人,丝毫不影响飞行;而南加州大学则研发出了像蚊子一样的飞行机器人,仅重1.36g。
2021-08-18 15:06:481831 抓取综合方法是机器人抓取问题的核心,因为它涉及到在物体中寻找最佳抓取点的任务。这些是夹持器必须与物体接触的点,以确保外力的作用不会导致物体不稳定,并满足一组抓取任务的相关标准。
2022-05-07 15:38:143626 替代传统的工装夹具,协助机器人高效准确地完成3D智能抓取
2022-08-02 11:34:393366 
新加坡南洋理工大学(NTU Singapore)的科学家们研制了一种机器人,可以独立组装椅子的各个零件。该机器人由一个HK Ensenso N35 3D相机和两个能抓取物体的机器臂组成。
2022-08-08 17:40:042104 系统、三维视觉在线课程等产品及内容,展示3D视觉感知在机器人、元宇宙等领域的创新应用潜能,让与会者一览3D数字化世界的精彩。
2022-08-24 09:14:093120 电子发烧友网站提供《Buddy:3D打印的Arduino社交机器人.zip》资料免费下载
2022-11-01 11:37:290 想要机器人能够快速、精准且轻松地抓取和放置货物?事实上,至今仍然需要漫长而艰难的设置和培训阶段,才能实现这个看似简单的任务。具有空间感、能够像人一样交互的机器人更像是科幻故事中的情节,现实中尚未能实现。然而,随着3D技术普遍在机器视觉中发挥的作用日益增大,目前3D成像过程出现了许多变化。
2022-12-06 09:48:451309 我用 3D 打印机和 4 足蜘蛛机器人制作了一个伺服电机。在制造机器人时,我们经常购买伺服电机,但自己组装的乐趣,包括那些通过 3D 打印打印出来的零件,却是非凡的。
2022-12-09 11:44:411 3D 机器视觉正在改变机器人技术
2022-12-29 10:02:501155 3D视觉是机器人感知的最先进、最重要的方法,可以分为光学和非光学成像方法。目前应用最多的方法是光学方法,包括:飞行时间法、结构光法、激光扫描法、莫尔条纹法、激光散斑法、干涉法、照相测量法、激光跟踪法、从运动获得形状、从阴影获得形状,以及其他的 Shape from X等。
2023-06-07 11:28:354117 
胶管无序摆放在料框中,3D视觉对工件进行识别和定位,引导机器人实现对胶管的无序抓取并上料,用机械臂替代人工。
2023-07-04 09:50:521309 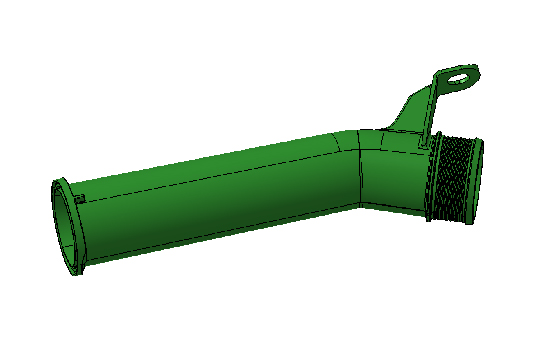
电子发烧友网站提供《如何制作3D机器人眼睛.zip》资料免费下载
2023-07-05 10:56:550 业务逻辑的高层次语义信息,相反,3D语义地图不仅包含物体及环境的结构信息,还有物体类别、功能属性等“常识”性信息,可以说是机器人的保姆级地图。
2023-08-11 11:01:13937 抓取综合方法是机器人抓取问题的核心,本文从抓取检测、视觉伺服和动态抓取等角度进行讨论,提出了多种抓取方法。各位对机器人识别抓取感兴趣的小伙伴,一定要来看一看!千万别错过~
2023-08-19 17:19:462865 
3D视觉引导机器人技术在发动机制造行业的应用,实现了自动化拆垛抓取,提高了生产效率和质量,并克服了传统人工操作面临的效率低下和安全隐患等问题。该技术具有自主研发的深度学习算法建立通用模型、提高工件识别准确度、简化系统调参难度、自动生成机器人抓取轨迹等优势,具备广阔的发展前景。
2023-10-23 14:42:22862 
本文还引入了多视角一致性优化模块,以提高学习到的射线-表面距离场在不同视角下的一致性。通过在多个数据集上的实验证明,RayDF方法在三维形状重建的准确性和效率方面优于现有的方法。
2023-11-10 15:04:141130 
经过以上对移动抓取机器人系统详细的剖析,我们可以知道移动抓取机器人系统并不是简单的“堆料”,而是以移动底盘的智能路径规划、视觉识别、移动底盘与抓取系统、多传感器融合为核心的高度复杂的机器人系统。
2023-12-19 15:09:031460 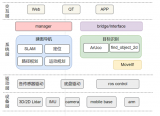
随着制造业对自动化、智能化需求的不断提升,如何实现鞋垫上下料的精准、高效操作成为了企业亟待解决的问题。传统的上下料方式往往依赖人工,存在效率低下、精度不足等问题。而富唯智能的3D视觉引导机器人抓取解决方案,则能够有效解决这些问题。
2024-04-08 16:57:341278 
设计的新一代深度引擎芯片MX6800,配备高性能主被动融合双目成像系统,能够在户外、室内、夜晚、白昼等不同光照条件以及复杂多变的动态环境中稳定输出高质量深度数据,精准还原场景和物体的3D信息,广泛适用于AMR、巡检机器人、配送机器人、人形机器人、机械臂、无人机、人体重建等机器
2024-04-30 18:00:531735 
上海伯东 Stratasys H350 3D打印机, 使用工业级 SAF 选择性吸收熔融技术, 逐步替代传统的生产方式, 3D打印机助力机器人研发与制造, 为机器人的制造工艺带来了新的变革. 实现
2024-07-05 17:22:472057 随着智能化技术的不断发展,汽车制造企业正积极寻求提升智能化水平的途径。富唯智能的3D视觉引导机器人抓取技术为汽车制造企业提供了一种高效、智能的自动化解决方案。
2024-12-25 15:00:24794 
近日,国际权威行业研究机构Interact Analysis发布《韩国商用及工业移动机器人3D视觉市场分析》报告(以下简称“报告”)。数据显示,奥比中光在韩国商用和工业移动机器人3D视觉市场中排名第一,市场份额达到约72%。
2025-10-23 16:27:40587
 电子发烧友App
电子发烧友App











 工商网监
工商网监
评论