世界上第一台真正意义上的移动机器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它装备了电视摄像机、三角测距仪、碰撞传感器、驱动电机以及编码器,并通过无线通讯系统由二台计算机控制,可以进行简单的自主导航。
2016-05-25 09:57:53 2617
2617 动机器人是机器人的重要研究领域,人们很早就开始移动机器人的研究。移动机器人智能的一个重要标志就是自主导航,而实现机器人自主导航有个基本要求——避障。
2018-05-15 09:30:0313928 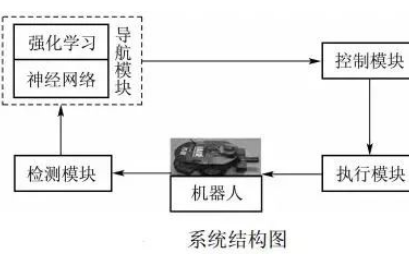
视觉系统20年前已被广泛应用于大型工业、医疗设备的精密检测环节,例如,达芬奇手术机器人。视觉定位导航的稳定性、精度可以很高;视觉系统近5年来已被广泛应用于商用移动机器人产品的自主定位导航,例如,大疆无人机。复杂环境下的视觉定位导航技术已日益成熟;
2017-11-24 13:19:261641 电子发烧友网报道(文/李宁远)对具有移动功能的机器人来说,导航是一直不会过时的热点。与带有自动驾驶功能的汽车相比,机器人的自动驾驶自主导航受限于本体的体积和成本,运用在其上的传感器既要控制体积也要
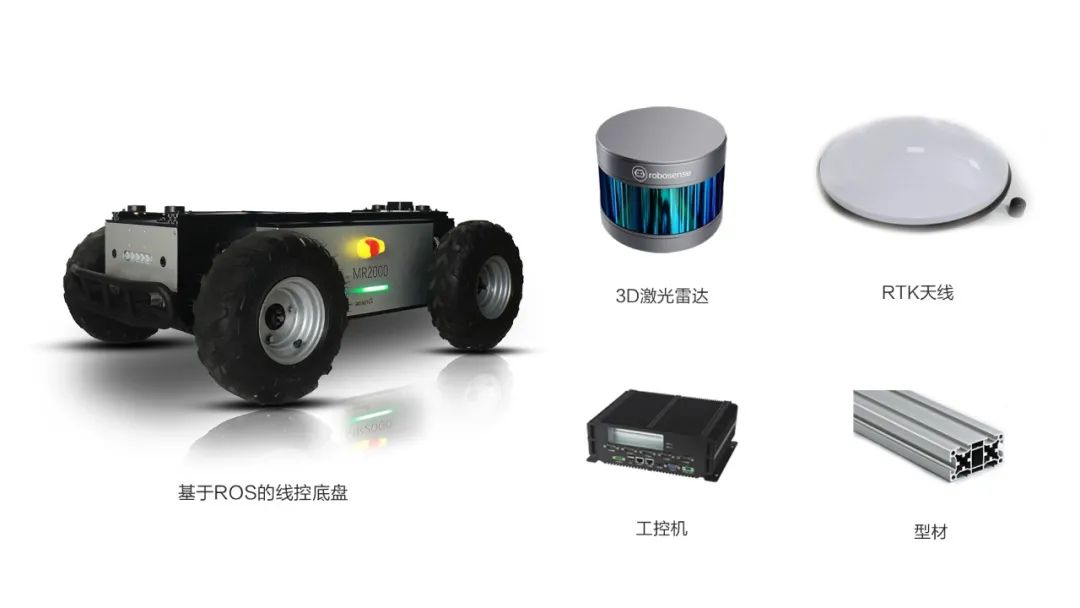
2022-08-20 08:46:003322 局限全场景自主移动机器人在各领域开疆拓土的根本问题。 如今, 松灵机器人宣布推出NAVIS 3D激光自主导航平台 ,以一种更简单、更快捷以及更稳定的方式,助力移动机器人走向更远的未来。 ▍全场景自主导航让移动更轻松 从室内
2023-06-01 11:45:101941 
请各位大神指导,移动式机器人是怎么做EMC保护的,机器人是锂电池供电,所以就不能接大地了,那么对机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
目前产业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对产业机器人的运动轨迹进行示教或离线编程,可节约
2015-01-23 15:02:27
技术的迅速发展,越来越多的研究者采用摄像机作为全自主用移动机器人的感知传感器。这主要是因为原来的超声或红外传感器感知信息量有限,鲁棒性差,而视觉系统则可以弥补这些缺点。而现实世界是三维的,而投射于摄像
2019-06-08 08:30:00
labview 视觉机器人抓取工件 CCD相机的二维坐标系的建立?希望分享,谢谢
2017-08-18 20:53:37
```` 移动机器人想要在完全陌生的环境中(没有预先录入地图的情况下)实现智能导航,显然不是那么简单。所以,移动机器人实现智能化的第一步,当然是像人一样拥有“眼睛”和“小脑”,拥有自主定位、导航、避
2018-01-03 11:41:55
在第二个阶段,就是增加视觉乃至触觉等一系列的传感的方法,让这个机器人更加智能,更加具有柔性。而接下来我想给大家展望一下未来机器人的模样,就是我们期望的主流,要提高它的智能、做自主的决策。上世纪 60 年代
2019-08-16 04:00:00
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
和即时定位问题,而自主导航需要解决的是智能移动机器人与环境进行自主交互,尤其是点到点自主移动的问题,这需要更多的技术支持。 要想解决机器人智能移动这个问题,除了要有SLAM技术之外,还需要加入路径规划
2018-08-24 16:56:24
ZN-RAI02工业机器人与视觉实训平台是什么?ZN-RAI02工业机器人与视觉实训平台有哪些技术性能?ZN-RAI02工业机器人与视觉实训平台的结构是由哪些部分组成的?ZN-RAI02工业机器人与视觉实训平台有哪些配套软件?
2021-08-09 06:22:03
无论是传统的工业机器人系统,还是当今最先进的协作机器人(Cobot),它们都要依靠可生成大量高度可变数据的传感器。这些数据有助于构建更佳的机器学习(ML)和人工智能(AI)模型。而机器人依靠这些模型变得“自主”,可在动态的现实环境中做出实时决策和导航。
2020-08-05 07:08:21
家庭环境是动态变化的,如家具等可能移动位置,因此需要完成自定位的同时完成环境地图创建,并在此基础上实现从当前位置到目标位置的自主导航。4 人机交互与语音识别技术机器人需要与人类进行交流,人可以通过语音向机器人发布命令,同时机器人可以通过语音向人类进行询问、回答人类的问题、表达机器人完成任务的情况。
2015-07-19 23:33:42
对机器人进行控制和数据传输。搭载摄像头可以实现远程监控和遥控,搭载机械臂可以实现抓取物体。详细计划:在HIKEY上跑ROS,使用rplidar(或者kinect),先进行地图建模,然后在根据建立的地图
2016-04-05 12:17:40
,正在选取合适的AI加速系统,工业用品,有小巧,稳定,成本等方面考虑,正在选型。 ④项目开展,按时间计划实施。⑤项目调试,优化,分享。 预计成果 完成基于机器视觉的工业机器人抓取工作站,并拿出基于机器视觉的工业机器人抓取路径规划方案的典型应用作为核心技术,加以推广。
2019-09-18 14:18:14
到达指定位置、机器人定时巡逻、跟随等等,于是有了机器人实时定位与导航。定位定位算法使用自适应的蒙特卡洛(AMCL),蒙特卡洛是一种经典的粒子滤波算法,它适应于局部定位和全局定位两类问题,自适应解决了
2019-08-21 22:12:16
申请理由:现在正在参与视觉机器人的项目,想了解更多的关于机器人的产品与知识。项目描述:水果采摘机器人:机器人寻找视野中的水果,并移动到相应的位置,由机械臂进行采摘水果并放到指定的位置。
2015-10-29 11:00:03
、Gazebo仿真(含RGBD相机/激光雷达仿真)、实物机器人运动控制,实现\"仿真→实物\"的无缝衔接
高阶应用篇(7-9章)
聚焦视觉SLAM、自主导航等前沿场景,提供完整项目链路(如
2025-04-27 11:24:32
阅读心得体会:ROS2机器人视觉与地图构建技术
通过对本书第7章(ROS2视觉应用)和第8章(ROS2地图构建)的学习,我对机器人视觉感知和自主导航的核心技术有了更深入的理解。以下是我的心得体会
2025-05-03 19:41:47
`内容简介本书是关于机器人学和机器视觉的实用参考书, 第一部分“基础知识”(第2章和第3章)介绍机器人及其操作对象的位置和姿态描述,以及机器人路径和运动的表示方法;第二部分“移动机器人”(第4章至第
2018-01-17 17:38:11
`内容简介本书是关于机器人学和机器视觉的实用参考书, 第一部分“基础知识”(第2章和第3章)介绍机器人及其操作对象的位置和姿态描述,以及机器人路径和运动的表示方法;第二部分“移动机器人”(第4章至第
2018-04-08 18:19:42
过程③本项目已经初具雏形,正在选取合适的AI加速系统,工业用品,有小巧,稳定,成本等方面考虑,正在选型。④项目开展,按时间计划实施。⑤项目调试,优化,分享。预计成果完成基于机器视觉的工业机器人抓取工作站,并拿出基于机器视觉的工业机器人抓取路径规划方案的典型应用作为核心技术,加以推广。
2019-09-18 19:24:11
人类社会中发挥着越来越重要的作用。但移动机器人拥有自主导航能力,才能进一步完成上诉所设定的任务。可以说自主导航能力是移动机器人最为基础和核心的技术,而上位机软件的实现与设计,则进一步推动机器人的完善
2023-06-28 09:36:32
,施工较为方方便,能够适应各种使用环境。
02二维码导航
二维码导航属于视觉识别,实现原理是在地面铺设二维码阵列,通过移动机器人(AGV/AMR)下方的相机扫描二维码实现机器人的定位。
**二维码导航优点
2023-06-28 09:52:41
目前主流的是自主移动机器人,可以根据环境情况进行自主移动的功能,最主要的是配备激光导航,这样的可以扫描整个地形,自己机器人定位自己位置,可以按照主人的规划自主去到固定位置执行一定任务,例如讲解或播放
2020-06-12 17:04:58
模式,逐渐向以工业机器人为主导的生产模式转变。但是,随着科技的发展和进步,原有单纯采用通过示教和预编程来实现自动化工作的机器人产品在柔性生产能力上已经很难满足现代生产的需要,引入具备机器视觉功能的机器人
2021-04-29 09:42:45
视频,使机器人能够进行路径规划和自主导航。通过接收下层的多传感融合信息,能够实现近距离的避障,因此在遇到障碍物时进行报警。到达目标点后,能够语音解说,解说完后能与参访者进行简单对话。4 视觉导航 视觉
2019-07-04 08:30:00
自主式移动机器人系统是指根据指令任务及环境信息进行自主路径规划,并且在任务执行过程中不断采集局部环境信息,做出决策,从而实现安全行驶并准确到达目标地点的智能系统。本文以LPC2119为控制核心,介绍
2020-05-11 06:39:04
对于在室外环境工作的移动机器人通常使用惯导/卫星组合导航方式。惯性导航系统具有完全自主、抗干扰强、隐蔽能力好和输出参数全面等优点,但它的鲁棒性极低,误差会不断随时间累积发散。卫星导航系统具有
2019-07-11 07:08:49
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
2023-09-20 06:24:09
制造出像人一样具有智能的能替代人类劳动的机器人,一直是人类的梦想,人类获取的信息80%以上是通过视觉。因此,在智能机器人的研究中,具有视觉的机器人的研究也就成了第一位的。对机器人视觉伺服系统的研究是机器人领域中的重要内容之一,其研究成果可应用在机器人自动避障、轨迹跟踪和运动目标跟踪等问题中。
2019-09-27 08:07:35
,导航技术,计算机技术,人工智能等多个领域,因而对移动机器人的控制部分提出很高的要求,特别是视觉传感器的出现,要求控制系统不仅存储量大,而且处理速度快等。以往基于PLC和单片机控制的移动机器人就不能很好
2020-11-23 15:08:52
怎样去实现ROS机器人的定位导航呢?如何对ROS机器人的定位导航进行仿真?
2021-12-23 09:22:45
移动机器人是机器人的重要研究领域,人们很早就开始移动机器人的研究。世界上第一台真正意义上的移动机器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它装备了
2020-05-14 08:15:00
开源自主导航小车MickX41 小车底盘1.1 底盘机械组装1.2 底盘硬件框图2 电气系统搭建本系列教程意在分享自己学习ROS自主导航小车时候的笔记,教程内容包含了从零开始搭建一个四轮的小车
2021-08-06 07:08:33
、抓取、装配、入库等训练,2、工业机器人与视觉实训平台包含六自由度工业机器人、智能视觉检测系统、PLC控制系
2021-07-01 06:38:35
,而是更多地融入了机器视觉、机器听觉、机器触觉、移动机器人的自主定位等新技术和新方法;也不再局限于一些理论层次上的分析,而更多的是以实际应用为主,在实际工作中扮演生产者的角色,在生活中发挥生活助手
2015-02-03 10:51:09
、人工智能和计算机视觉技术来观察和理解周围环境,并自主导航。例如,仓库的自主移动机器人(AMR)使用扫描仪监控库存水平和自动化物料处理,能防止库存耗尽。为了加快工作速度,自主移动机器人还可以在工厂
2022-10-18 14:34:33
定位导航技术使机器人即使在无人操控的情况下,也可实现自主行走、避障及顺利到达目的地,机器人和人类绘制地图一样,在描述环境及认识环境的过程中都需要依靠地图,它主要利用地图类描述其当前环境信息,并随着
2020-08-18 06:47:00
机器人导航概述Adept MobileRobots Seekur机器人MEMS 角速率检测
2021-01-27 06:32:27
和可行性。 运动视觉研究的是如何从变化场景的一系列不同时刻的图像中提取出有关场景中的目标的形状、位置和运动信息, 将之应用于移动机器人的导航与定位。首先要估计出目标的空间位置和运动信息, 从而为移动机器人
2019-06-01 08:00:00
在物流搬运行业,拳头机器人由于其独特的并联结构,常用于高速整列、装箱等场合。其中,拳头机器人的视觉线跟踪技术正得到广泛的应用,如下图所示:
2020-08-06 06:30:31
电动轮椅,融合多种领域的研究,包括机器视觉,机器人导航和定位.模式识别,多传感器融合及用户接口等。目前美国、德国.日本、及中国等多个国家都在进行这方面的研究。
轮椅的安全导航,是智能轮椅要解决的中心
2023-09-25 07:13:35
一.机器人导航算法工程师岗位职责:1. 负责机器人视觉或激光雷达的SLAM算法的研发和优化;2. 负责机器人自主导航定位算法的研发,主要包括基于深度相机或激光雷达、IMU、里程计等多传感器信息融合
2020-06-08 05:06:44
服务机器人想要自由行走,实现自主定位导航是关键,自主定位导航包括定位、建图与路径规划。SLAM作为机器人定位导航的核心技术,正不断获得行业内的重视,但SLAM只是完成定位与地图创建这两件事,它并不
2018-10-10 16:29:21
随着计算机科学和自动控制技术的发展,越来越多的不同种类的智能机器人出现在工厂、生活当中,机器人视觉系统作为智能机器人系统中一个重要的子系统,也越来越受到人们的重视。它涉及了图像处理、模式识别和视觉
2020-04-07 07:27:24
°范围、半径20米的二维区域检测和轮廓扫描,并结合V-SLAM视觉技术,实现机器人自身的导航定位及避障等功能。 在电池选配方面,轻骑兵底盘2.0兼容37V/10Ah或37V/20Ah的电池,较大程度
2021-01-07 10:09:07
。这里所需的基础能力就是路径规划,也就是一般在完成SLAM后,要进行一个叫做目标点导航的能力。通俗的说,就是规划一条从A点到B点的路径出来,然后让机器人移动过去。要实现这个过程,运动规划要实现至少两个
2017-08-01 13:50:56
技术先进的无反射板激光导航移动平台。同时为这些相关行业提供智慧物流以及仓储系统解决方案。 苏州智伟达机器人科技有限公司根据LNM自主导航解决方案自主研发激光导航AGV底盘定制 利用激光雷达构建室内地图、实现
2017-06-10 14:24:17
怎么设计一种室外移动机器人组合导航定位系统?如何实现室外移动机器人组合导航定位系统的硬件设计?如何实现室外移动机器人组合导航定位系统的软件设计?
2021-04-19 10:50:33
MRC5000是一款全自主知识产品的移动机器人领域专业控制器产品。MRC5000具有“可靠、稳定、灵活、易用“等特点,内置多种导航算法,支持各种国内外常用型号导航传感器,具有防火墙功能和无线路由功能
2021-11-22 16:14:01
对国内外移动机器人智能导航研究中采用的几种导航方式进行了对比, 对近几年发展起来的并已在移动机器人导航研究领域中得到应用的相关技术进行了论述, 对自主式移动机器人导
2009-07-10 08:21:40 22
22 针对智能机器人车的导航、控制问题,本文设计搭建了一套基于AT89S52 的机器人车自主导航控制系统。该系统采用联合CCD 和超声波测距的两级融合方法对目标的运动姿态、状态信
2009-08-28 10:35:5325 产品介绍 ABB机器人产品线丰富,包括多关节机器人、协作机器人、喷涂机器人、SCARA机器人以及自主移动机器人(AMR)等多关节机器人:ABB的多关节机器人是六轴关节型
2024-09-30 17:56:07
产品简介经世智能CNC上下料复合机器人,复合机器人集成AGV+机械臂+视觉系统,提供CNC多工序柔性上下料、CNC全自动刀具更换自动化解决方案,打通生产物流最后“一公里"。机器人机械臂末端可定制末端
2025-08-13 09:47:30
产品简介经世智能半导体行业晶圆盒转运复合机器人,复合机器人在半导体行业主要应用于晶圆盒转运、机台上下料等环节,通过“AGV移动底盘+协作机械臂+视觉系统"一体化控制方案实现高效自动化作业。机器人
2025-08-13 13:28:39
机器人技术基础系列:规划与导航
概览
自主移动机器人的规划与导航包括利用有目的的抉择制定和执行来使系统实现最高级的目标。机器人是否胜任导航
2010-03-11 12:10:101665 
移动机器人导航所采用的主要的技术,红外,地磁等等。
2016-05-23 16:29:075 基于模糊控制的除草机器人自主导航_郭伟斌
2017-01-12 22:50:413 自主定位导航是机器人实现智能化的前提之一,是赋予机器人感知和行动能力的关键因素。如果说机器人不会自主定位导航,不能对周围环境进行分析、判断和选择,规划路径,那么,这个机器人离智能还有一大截的差距
2017-09-19 16:08:3630 (1) 导航技术 导航技术是移动机器人的一项核心技术之一[3,4]它是指移动机器人通过传感器感知环境信息和自身状态,实现在有障碍的环境中面向目标的自主运动目前,移动机器人主要的导航方式包括:磁导航
2017-11-12 10:55:5510 针对未知环境中移动机器人的导航问题,基于生物学的认知和发育机理构建自主导航的认知发育模型。通过自主插入神经元节点,设计结构可动态发育的神经网络,模拟生物的发育特性达到与应用需求相匹配的网络规模。通过
2018-01-17 11:09:412 机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2018-04-02 11:35:008142 报道称,该技术可使移动机器人平台在作战环境中自主导航,同时在特定情况下让机器人完成人类期望其执行的动作。
2018-07-26 14:55:001303 Omron Adept Technologies最近获得了三项移动机器人专利。每项专利都涉及不同的移动机器人解决方案,包括:运输车、作业管理系统(Enterprise Manager)和用于作业管理的自主导航车。
2019-05-25 09:43:073472 近日,佛罗里达人类与机器认知研究所 (IHMC)发布最新双足机器人视频(这次是真的,不是CG),展示了实验体波士顿动力机器人Atlas可自主导航,通过不同地形路面,完全实现机器人自主行走!
2019-07-09 14:22:073520 本文主要研究3D视觉技术在机器人抓取作业中的应用,总结了3D视觉技术在识别、定位物体时面临的挑战,给出了抓取作业机器人3D视觉系统的设计方法。
2019-07-25 08:43:109251 相较于传统的磁条导航、二维码导航移动机器人,激光导航移动机器人以其自主灵活的优势越来越受到用户的青睐,并在工业制造、电子制造、电商仓储、医疗教育、食品烟草、安防巡检等各行各业得到了广泛应用。
2020-01-27 17:25:002681 相较于传统的磁条导航、二维码导航移动机器人,激光导航移动机器人以其自主灵活的优势越来越受到用户的青睐。
2020-03-21 09:55:113266 SLAM技术作为机器人自主移动的关键技术,让很多人都误解为:SLAM=机器人自主定位导航。
2020-03-30 10:39:113343 与视觉导航又有何却别?今天,我们就深入了解一番。 首先大家要明确一个概念同时定位与地图构建(简称SLAM),通常是指在机器人上,通过对各种传感器数据进行采集和计算,生成其自身位置姿态的定位和场景地图信息的系统。SLA
2020-04-13 12:57:0510990 近年来,随着智能家居的布局,扫地机器人受到不少高端家庭和追求新鲜刺激的年轻人的追捧,逐渐成为了现代家庭常用的清洁工具之一。伴随扫地机市场的潜力扩张,不少中高端扫地机器人都配备了视觉导航系统。
2020-06-13 11:38:342212 环境信息,利用人工智能识别、理解、推理并进行判断和决策来完成一定的任务。因此智能机器人除了具有环境感知能力外,还具有较强的识别理解能力和决策规划能力。 定位是机器人实现自主导航的基本环节 目前,自主移动机器人
2021-10-14 14:30:552554 为了提高采摘机器人自主导航和路径规划能力,提出了基于计算机视觉路径规划和RBF神经网络自适应逼近算法的导航方法。使用图像分割,平滑处理和边缘检测技术,根据图像像素灰度值确定了导航线的位置,利用
2020-08-27 14:30:0022 相较于传统的磁条导航、二维码导航移动机器人,激光导航移动机器人以其自主灵活的优势越来越受到用户的青睐,并在工业制造、电子制造、电商仓储、医疗教育、食品烟草、安防巡检等各行各业得到了广泛应用。对于磁条导
2020-12-26 09:45:311728 卡耐基梅隆大学 Safe AI 实验室赵鼎教授团队首先基于松灵机器人提供的SCOUT MINI 机器人平台,搭建了一个可以实现自主导航的机器人平台。 近日,卡耐基梅隆大学 Safe AI Lab
2021-03-12 11:09:592857 在传统基于固定视觉的排爆机器人抓取系统中,相杋视觉易被遮挡且不能保证拍摄清晰度。基于随动视觉技术,提岀一种将深度相机置于机械手末端并随杋械手运动的排爆杋器人自主抓取系统。利用深度相机计算目标物体
2021-03-12 15:19:2123 机场视觉移动服务机器人的设计方案
2021-06-22 16:22:4427 好长时间没写博客了,今天继续工作的第一件事情是做一款STM32 的ROS智能移动机器人,构建地图以及自主导航。在这里笔者认为最难的事情是搞机器人底盘,由于之前没有接触过32板,查了一周的文档才清楚
2021-12-07 14:51:0818 电子发烧友网站提供《自主导航和绘制二维地图的机器人.zip》资料免费下载
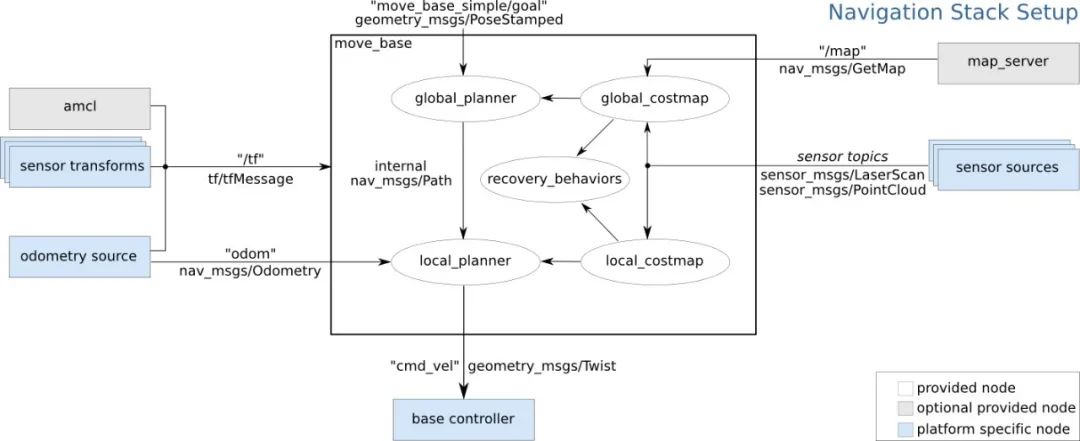
2022-10-18 17:10:200 我们先来理清自主导航的框架,其关键是自主定位和路径规划。针对这两个核心功能,ROS提供了一套完整的框架支持,收到导航目标位置后,机器人只需要发布必要的传感器信息,框架中的功能包即可帮助机器人完成导航。
2023-02-06 11:52:451643 机器人视觉抓取的目的是使用一个机械手模型(包括二指或多指夹爪,吸盘等),以RGB或RGBD相机采集的场景图像为输入计算出一个最优的抓取位姿,使机械手在该位姿下可以稳定地抓取模型已知或未知的物体。
2023-03-30 10:19:291102 人类社会中发挥着越来越重要的作用。但移动机器人拥有自主导航能力,才能进一步完成上诉所设定的任务。可以说自主导航能力是移动机器人最为基础和核心的技术,而上位机软件的实现与设计,则进一步推动机器人的完善发展。在
2023-06-09 13:12:041948 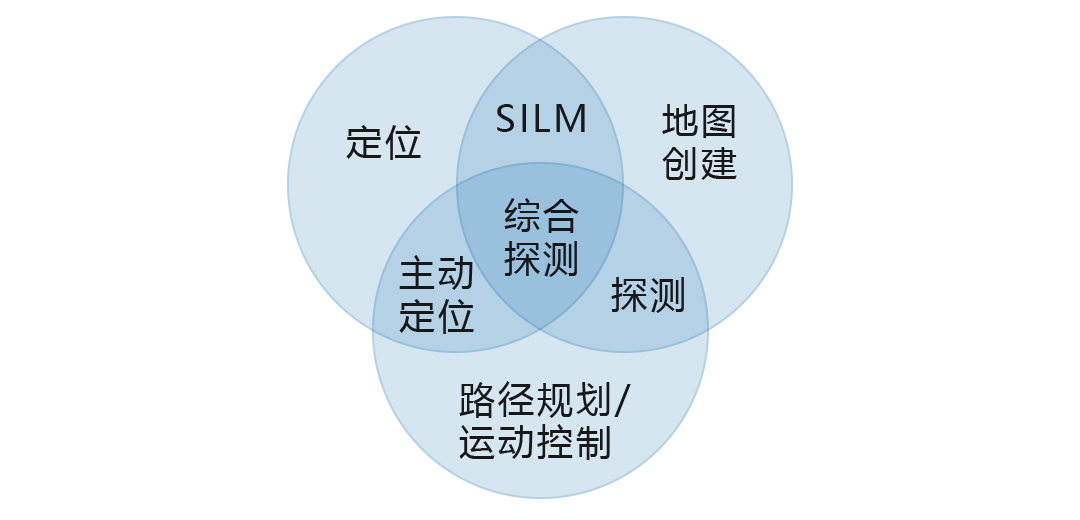
构建移动机器人流程满足各车型需求向导式设计构建移动机器人按照向导指引输入:机器人机械参数(长宽高等)、运动控制类型(底盘方式)、自主导航方式(主导航类型)、电气功能配置(机器人电气逻辑)等。工具链
2022-02-16 16:31:541241 
人类社会中发挥着越来越重要的作用。但移动机器人拥有自主导航能力,才能进一步完成上诉所设定的任务。可以说自主导航能力是移动机器人最为基础和核心的技术,而上位机软件的实
2023-05-29 17:06:452222 
电子发烧友网站提供《自主导航机器人的创建.zip》资料免费下载
2023-06-27 11:16:460 抓取综合方法是机器人抓取问题的核心,本文从抓取检测、视觉伺服和动态抓取等角度进行讨论,提出了多种抓取方法。各位对机器人识别抓取感兴趣的小伙伴,一定要来看一看!千万别错过~
2023-08-19 17:19:462865 
上篇,小岚为大家介绍了slamware自主定位导航解决方案在移动生态、开发便利性、智能性上探索的成果,那背后到底是哪些关键技术在赋能呢? 机器人在未知场景中,要想实现类人般的智能移动,必须要具备地图
2023-10-11 16:07:002156 
电子发烧友网站提供《基于GPS的自主移动机器人导航定位系统的实现.pdf》资料免费下载
2023-10-25 11:23:402 富唯智能移动机器人是一款拥有自主导航能力和物料转移抓取功能的智能机器人,采用先进的无线通信技术和高精度传感器,能够实现自主导航和避障,完成生产线上的物料转运任务,并与其他设备实现无缝对接。此外,富唯
2024-01-17 11:58:36911 复合机器人是一种集成了移动机器人、协作机器人和机器视觉等多项功能的新型机器人。它的开发目的是为了解决工厂物流中最后一米的问题,提供智能搬运解决方案。复合机器人不仅集成了自主移动机器人(AMR)、机械臂等工作单元,还使用了机器人视觉定位技术进行二次定位,以满足机械结构运动精度的苛刻要求。
2024-02-28 15:05:403176 
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论