有没有机器人比较全的资料
2017-03-21 12:35:21
请各位大神指导,移动式机器人是怎么做EMC保护的,机器人是锂电池供电,所以就不能接大地了,那么对机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
机器人技术和机器学习正成为嵌入式系统硬件和软件供应商的下一个重大事件。嵌入式系统可以通过网络连接和物联网(IoT)来传递信息、共享资源。无论是智能,低能耗,边缘设备,中间网关还是计算节点,都需要
2021-12-20 06:03:10
本帖最后由 lee_st 于 2018-2-23 13:27 编辑
机器人技术导论
2018-02-23 13:26:03
机器人技术不再是未来的幻想,它已经进入了我们的日常生活。但在这一领域,我们缺乏相应的法律法规。比如无人机,现在由美国联邦航空管理局( FAA)来管理,但很多人认为,这完全越权了;比如机器人
2015-01-13 16:39:57
labview 视觉机器人抓取工件 CCD相机的二维坐标系的建立?希望分享,谢谢
2017-08-18 20:53:37
机器人),而这种多样性则展示了机器人技术对我们生活的渗透力,其影响之深远将不亚于之前计算机和互联网。机器人之所以能够展示出如此巨大的潜力与魅力,是因为它天然的半机械半数字属性,并且随着技术的进步,最终
2015-12-29 14:56:59
创新设计:基于慧鱼创意组合模型的机器人制作机器人的天空——基于Arduino的机器人制作机器人创意与制作系列机器人设计与控制PIC微控制器应用:PICBasic语言和PICBasic Pro语言编译
2015-02-22 07:34:56
机器人的运动原理还是属于最基本的简单机械。机器人运动主要是依靠什么装置?有些什么装置是机器人用的比较多的?
2015-02-03 11:22:01
及应用机器人技术基础(熊有伦)(此书比较早) 2.运动规划书籍:Principles of Robot Motion Theory, Algorithms
2019-05-22 06:53:10
现在想做机器人图像识别方面的研究,有问题请教大家,比如说:现在有十种瓶子,机器人能识别我指定的瓶子,并把它从A位置移动到B位置,关键是如何识别呢,不是很清楚,求大神指点!在此感激不尽!
2019-11-04 09:02:57
想弄一个vi可以动态显示机器人的姿态,但不知道有什么函数可以引入机器人的模型,帮帮忙,谢谢。
2012-02-11 17:25:22
机器人传感器技术使用毫米波传感器测量对地速度使用毫米波传感器映射和导航
2021-03-18 07:00:30
移动机器人有没有推荐的MCU,萌新求大佬帮助
2020-11-03 11:41:09
各位论坛前辈你们好,我是一名在校的即将升入大二学生,专业课暂时只学了c,电路分析基础和工程制图。我跟另外4个同学正在参加学校的机器人比赛,在机器人创意表演方面,就突发奇想,是否能做一个可以弹简单
2017-05-22 17:09:06
各位论坛前辈你们好,我是一名在校的即将升入大二学生,专业课暂时只学了c,电路分析基础和工程制图。我跟另外4个同学正在参加学校的机器人比赛,在机器人创意表演方面,就突发奇想,是否能做一个可以弹简单
2017-05-22 17:06:22
机器人接触式物体探测技术电路设计
2020-03-02 11:06:28
PID控制的优点有哪些?机器人控制技术有哪些重要性?
2021-06-18 08:02:56
机器人有哪些种类?大家来说说
2014-12-25 10:01:32
机器人有哪些类型?
2021-06-18 06:41:57
现在的机器人使用的电机多是什么品牌的呀,还是自己根据需求定制的呀?
2016-03-15 10:37:57
`机器人的主要技术参数 机器人的技术参数反映了机器人可胜任的工作、具有的最高操作性能等情况,是设计、应用机器人必须考虑的问题。机器人的主要技术参数有自由度、分辨率、工作空间、工作速度、工作载荷等
2017-08-15 14:00:52
机器人的优缺点有哪些?机器人是由哪些部分组成的?
2021-10-11 07:51:29
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
安静高效的机器人正在接管——阻止它们已经太迟了。不,这不是机器人世界末日另一个可怕的故事。这是关于您下一设计硬件预算和规划面临威胁的问题。虽然您无法阻碍技术变革,但是您可以预测其影响。
2019-07-17 08:08:16
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
机器人编程需要什么软件
2023-11-01 07:34:30
科技始终来自人性,一语道出科学与技术皆由人类的欲望所生。在讲求经济效益与效率的现代,人类进一步整合计算机与机器,创造机器人以期能够增加工作效率,或是代替人类执行一些具危险性的工作,因此机器人的相关
2019-06-27 07:02:14
`据传奥地利发生了一起机器人自杀事件,自杀的机器人叫Roomba 760。据说这位机器人自杀的原因是忍受不了繁重又无限重复的清洁工作,而选择了***。***之后是这个样子滴是不是渣都木有了`
2016-01-05 11:07:53
随着社会的飞速发展和科技进步,机器人得到广泛应用,而工业机器人的应用更是走在了前面。工业机器人集机械、电子、计算机等先进技术于一体,自1962年第一台机器人在美国投入使用以来,已经广泛应用于制造行业
2020-05-12 07:20:37
为主,尽管机器人开始有搭载摄像头的趋势,但对视觉的理解仍然较低,往往需要有明显的特征点作为辅助,同时抗干扰能力弱,对光照条件,部分遮挡等常见题目不能找到可靠的方法。 机器人技术对图像理解的要求是迫切
2015-01-23 15:02:27
机器人运动控制技术,尽管运动控制器需求增长迅速,但即便到明年,整体市场规模仍不到 10 亿元。高性能工业机器人作为核心装备,一直被国外品牌垄断,而运动控制器的自主可控一直是国产机器人领域的一大痛点
2021-07-28 07:33:29
什么是移动机器人软硬件系统问题?移动机器人软硬件系统有哪些问题呢?
2021-11-11 06:07:42
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
2024-07-05 08:52:55
传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿人机器人
2019-09-18 06:17:46
家庭服务机器人是机器人的发展方向,是我国进一步加强机器人技术研究的突破口。家庭服务机器人旨在将家庭成员从家居的繁琐家务中解放出来,给家庭成员提供帮助、娱乐等。
2019-08-20 06:57:41
ZN-RAI02工业机器人与视觉实训平台是什么?ZN-RAI02工业机器人与视觉实训平台有哪些技术性能?ZN-RAI02工业机器人与视觉实训平台的结构是由哪些部分组成的?ZN-RAI02工业机器人与视觉实训平台有哪些配套软件?
2021-08-09 06:22:03
ZNL-IR03工业机器人综合实训平台是什么?ZNL-IR03工业机器人综合实训平台有哪些特点?ZNL-IR03工业机器人综合实训平台有哪些技术参数?
2021-08-16 07:16:23
无论是传统的工业机器人系统,还是当今最先进的协作机器人(Cobot),它们都要依靠可生成大量高度可变数据的传感器。这些数据有助于构建更佳的机器学习(ML)和人工智能(AI)模型。而机器人依靠这些模型变得“自主”,可在动态的现实环境中做出实时决策和导航。
2020-08-05 07:08:21
近年来,人工智能领域的大模型技术在多个方向上取得了突破性的进展,特别是在机器人控制领域展现出了巨大的潜力。在“具身智能机器人大模型”部分,作者研究并探讨了大模型如何提升机器人的能力,大模型存在
2024-12-29 23:04:07
)的参数进行了调优,以反映与仿真模型中参数的差异。4.1 实验在我们的实验1中,我们再次测试了平衡和转向性能。机器人可以承受来自各个方向的推动。手推机器人一次,它的快照如图4.1所示。在运动方面,该机器人
2021-08-30 06:18:33
就是说,一个机器人发指令,一堆机器人向这个机器人靠拢,可以通过zigbee么?或者是别的什么传感器?先谢过了!
2012-09-26 18:50:15
Ⅲ 建模为了使用基于模型的控制策略以及现代状态估计技术,需要一个描述机器人刚体动力学的系统模型。A. 坐标和符号规定旋转规定:a˙\dot aa˙ 表示对时间的导数, ̂a^{\hat a}a^表示
2021-09-15 08:12:14
一、认识机器人技术:工业机器人是先进的机电一体化数字化装备,集机械、电子、控制、计算机、传感器、人工智能等多学科高新技术于一体,技术附加值很高。对提高产品的质量与产量、保障人身安全,改善劳动环境
2015-03-03 13:11:28
` 山东昊威机器人有限公司的书法机器人在展会上可谓是吸睛神器,小伙伴们纷纷前来围观,这不,国际友人都不禁为我们昊威书法机器人手动点赞啦!!!厉害啦我的机器人。`
2017-08-11 11:48:54
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
清洁机器人是服务机器人的一种,所谓服务机器人是指自主或半自主的、从事非生产活动、能完成有益于人类健康的服务工作的机器人。家庭清洁机器人集机械、电子、传感器、计算机、控制、机器入技术、人工智能等诸多
2019-09-05 06:56:37
各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。 1920年捷克作家卡雷尔·查培克在其剧本《罗萨姆的万能机器人》中最
2015-01-19 10:58:38
有没有人知道什么是拖拽式机器人,其具体定义是什么
2016-03-11 09:20:00
近年来,我国机器人产业取得了良好的发展成果,不管是工业机器人、服务机器人还是特种机器人都获得了广泛的应用。这一方面与全球自动化生产需求的不断释放,以及人口红利的日渐式微密切相关,另一方面更是得益于各种智能技术的持续进步与完善。
2020-08-14 07:14:27
工业机器人的四大特征是哪些?工业机器人是由哪些部分组成的?工业机器人是怎样进行划分的?
2021-10-11 09:10:17
求一套写字机器人的程序,用arduino编写的。怎么实现
2020-10-17 15:20:25
随着论坛的发展壮大,内容也逐渐丰富起来,许多车友,尤其是新人面对如此多的资料信息难免感到一片混乱,故工作室特意用本帖将目前本站所拥有的智能小车机器人资源进行整理,做成一个索引,方便大家查找学习
2012-10-11 17:41:02
`华南机器人应用培训中心拥有各种设备,开展各种不同的机器人培训班。打造各种工业现场常见的机器人工作站,现开展KUKA、发那科、三菱、ABB、爱普生工业机器人培训对外招生。 一、认识机器人技术:工业
2015-09-02 14:03:18
较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。那么,喷涂机器人有哪些术语呢?它的关键参数你是否了解?让小编一一为你详解。 喷涂机器人的主要术语 1、喷涂机器人涂装效率
2016-01-06 11:10:40
一。引言 机器人研究是自动化领域最复杂。最具挑战性的课题,它集机械。电子。计算机。材料。传感器。控制技术等多门学科于一体,是多学科高技术成果的集中体现。而仿人步行机器人技术的研究更是处于机器人课题
2020-08-19 06:57:09
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
2023-09-20 06:24:09
制造出像人一样具有智能的能替代人类劳动的机器人,一直是人类的梦想,人类获取的信息80%以上是通过视觉。因此,在智能机器人的研究中,具有视觉的机器人的研究也就成了第一位的。对机器人视觉伺服系统的研究是机器人领域中的重要内容之一,其研究成果可应用在机器人自动避障、轨迹跟踪和运动目标跟踪等问题中。
2019-09-27 08:07:35
——工业机器人的智能化程度要求也越来越高,采用深度学习技术为工业机器人赋能是目前各大厂商的统一认知。本文结合实际案例,简要说明一下智能机器人的实现流程。一、智能机器人概念 人工智能技术,其主要作用就是用
2018-05-31 09:36:03
如何完整的组装四足机器人?
2021-09-24 07:00:54
移动机器人利用导航技术,获得机器人的目前所处的位置,结合传感器技术对周围外界环境(障碍物等)作实时探测,并根据环境提供的信息规划一条可行路径完成达到目标点的任务。移动机器人技术涉及到传感器技术
2020-11-23 15:08:52
各位大神,现在小弟想用LabVIEW控制安川机器人,可是通过调用motocom32的DLL不能和机器人通信,听说LabVIEW不能二次开发安川机器人,请问有熟悉安川机器人的高手指点一二,不胜感激!
2014-11-10 12:29:06
`如何系统性地学习工业机器人技术?对于一个还没入门的想学机器人的小白而言,想快速见到成效的的话,找一所对自己胃口的机器人培训机构是很关键的,当然自己本身的决心和毅力离也很重要。工业机器人系统组成详解
2016-03-06 12:56:19
席文姣,陈帝伊,马孝义(西北农林科技大学 水利与建筑工程学院,陕西 西安712100)0引言如何设计智能灭火机器人控制器?控制器是智能机器人处理和控制信息的主体,它直接决定了机器人的行为和性能
2019-07-31 06:23:18
很高,安全,性能超越,这个技术是为航天航空研发的,执行的标准是美军标,MIL-C-22520系列标准,所有的四芯轴工具都是在此标准技术上发展来的。在这种压接形式下,我们就根本不用担心机器人连接
2017-04-25 16:34:23
如题。在论坛有看到家用机器人的2014年度十大款类型。比较感兴趣,不知道有没有大神了解比较全面的家用机器人知识?
2015-02-11 11:16:00
将Simulink模型与Lego机器人结合使用可提供令人愉悦的基于模型的设计体验支持LEGO MINDSTORMS NXT作为产品标准功能。即使没有ECRobot NXT,您也可以玩乐高游戏
2021-12-20 07:15:51
工业机器人的定义是什么?有哪些特点?工业机器人有哪几个子系统组成?各自的作用是什么?工业机器人的主要技术参数有哪些?
2021-07-05 07:20:36
随着中国制造业转型步伐的加快,机器人的使用越来越频繁,作为工厂里的技术工程师必需了解机器人的相关技术,那么通用机器人由什么部件组成呢?
2020-05-13 07:45:10
`<span style="" >工业机器人的技术原理机器人是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而
2018-11-23 10:40:38
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。
2020-03-27 09:03:30
混联机械手模块是基于并联机构单元的模块化设计的成功典范。工业机器人的几种常用结构形式(图)二、机器人的主要技术参数机器人的技术参数反映了机器人可胜任的工作、具有的最高操作性能等情况,是设计、应用机器人
2018-10-12 10:16:22
怎么实现六足机器人的设计?
2021-11-22 08:02:22
怎么实现对机甲大师机器人的控制?
2021-11-19 06:33:45
在物流搬运行业,拳头机器人由于其独特的并联结构,常用于高速整列、装箱等场合。其中,拳头机器人的视觉线跟踪技术正得到广泛的应用,如下图所示:
2020-08-06 06:30:31
关于ros智能机器人,就是一个写智能机器人代码的一个虚拟机,
2021-10-13 19:20:16
一种新型的工业机器人已经走到行业的前沿, 他们的主要特点是能够安全地协助人类工作。在网上有很多人谈论它们,但你认真了解过它吗?在2008年,很多人爱它们只是处于好奇心。在2012年,机器人被视为
2020-08-17 06:00:49
机器人视觉传感器详解一种新型的工业机器人已经走到行业的前沿, 他们的主要特点是能够安全地协助人类工作。在网上有很多人谈论它们,但你认真了解过它吗?
2020-08-14 07:24:17
吸尘机器人作为服务机器人领域的一个新产品,结合了机器人和吸尘器技术,能在无人看守情况下轻松地完成室内环境的吸尘等清洁工作,越来越受到人们的欢迎。
2020-03-18 06:18:37
目前市面里面的扫地机器人也能算入这个范畴吗?虽说扫地机器人也是应用了很多智能技术,但是就是个扫地的啊!感觉如果是智能家用机器人的话,应该不止某一方面的替代,而是应该有更多可以应用的场景。我自己搞着玩建了个群 131966071,希望能聚集机器人发烧友一起聊聊,侃侃
2015-06-17 18:33:17
。其中,扫地机器人针对的目标用户是所有家庭,产品的需求痛点是为了解放繁忙的人类,解放双手,用更智能化的机器代替人。近年来,国家相关部门不断加大对机器人产业的扶持力度。《国家中长期科学和技术发展规划纲要
2017-05-27 13:31:20
智能监控机器人是近年来机器人应用工程中一项前沿性的题目,智能化探测小车是智能行走机器人的一种。智能监控机器小车就是针对上述情况,在参考了目前大多数智能机器人的基础上,以降低成本为原则设计的。小车具备
2019-10-14 07:37:52
有什么机器人技术的资料?单片机开发的.
2011-06-21 10:42:25
20世纪以来随着电子技术的不断发展,以及人类对于自身的不断了解,机器人的研究也在不断的深入。现阶段能做出外表接近人类的机器人,走路接近人类的机器人……但这些都属于很前沿的领域,研究门槛高,实际的商业用途不是很广,所以大多还停留在样品阶段,走进市场的很少。
2019-10-16 08:27:30
随着计算机科学和自动控制技术的发展,越来越多的不同种类的智能机器人出现在工厂、生活当中,机器人视觉系统作为智能机器人系统中一个重要的子系统,也越来越受到人们的重视。它涉及了图像处理、模式识别和视觉
2020-04-07 07:27:24
摘要:机器人技术是综合了计算机、控制论、机构学、信息传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域,也是一个国家工业自动化水平的重要标志。机器人技术有着
2016-09-22 16:39:46
什么是激光SLAM?激光SLAM技术在机器人运动控制系统中的应用是什么?
2021-07-30 06:37:25
智能机器人红外发送接收电路详解
2019-09-19 09:10:40
随着人工智能技术的发展,机器人已经开始接管人类的部分工作,例如快递、工厂作业、餐厅服务员甚至媒体编辑---纽约时报就聘请了一位机器人做总编。未来,机器人可以介入半导体设计开发吗?例如,机器人可以进行FPGA开发吗?
2019-10-10 06:33:18
我是新人,求帮助啊,明天需要提交轮式机器人应用的报告,求大神给点建议,可用轮式机器人应用于那些方面,要求实际可行,应用于生活,农业,军事都可以,谢谢啦
2013-04-17 16:32:16
江智党建机器人是经过多年的市场沉淀 ;现已可以提供系统 全方位的党建机器人服务
2022-06-21 07:59:59
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。
2023-04-17 16:36:37
迈步机器人H系列 是全球首款采用柔性驱动器作为动力输出的外骨骼机器人。首创柔性驱动器作为动力输出,实现主动式康复训练专利生物力学模型分析步态,为用户提供精准、智能、个性化的康复训练方案前瞻性、多中心、随机对照注册临床试验,超百例样本量,充分验证有效性和安全性
2023-09-20 17:25:48
产品介绍 ABB机器人产品线丰富,包括多关节机器人、协作机器人、喷涂机器人、SCARA机器人以及自主移动机器人(AMR)等多关节机器人:ABB的多关节机器人是六轴关节型
2024-09-30 17:56:07
完整机器人模型 所有的link和joint标签完成了对机器人每个部分的描述和组合,全都放在一个robot标签中,就形成了完整的机器人模型。 所以大家在看某一个URDF模型时,先不着急看每一块代码
2023-11-22 17:09:53 1973
1973 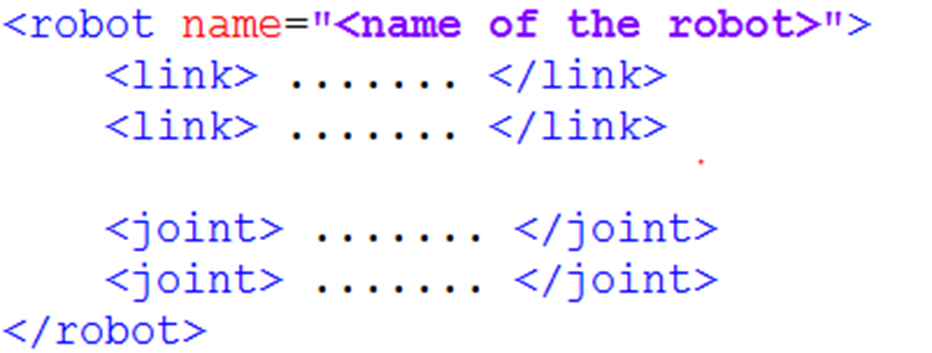
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论