本帖最后由 傲然one 于 2019-5-10 14:24 编辑
图中R4和C4起到什么作用?
2019-05-08 20:27:36
幅度明显,比原来的更加耐听了。如果说原来的C4是奔驰的话,那么摩机后的C4就是劳斯莱斯了。我打这个比喻意思是说在音质上的比喻,摩机后的C4在听感上比原来的C4更舒服!目前也就得出这些结论,哇哈哈!zt威武
2018-10-29 09:17:44
KUKA库卡C4机器人驱动器故障报警维修库卡机器人维修内容包括库卡机器人示教器维修,KUKA伺服驱动模块维修,库卡机器人伺服电机维修,KUKA机械手PC工业电脑维修,库卡机器人电路板维修,库卡机
2021-09-17 07:09:52
开机后没有选择工具。 解决方案:配置→当前工具/基坐标→工具号→1 2 专家登陆 一般情况,开机后我们要编辑程序时,首先我们要登陆专家级别,有助于我们操作。 解救方案:配置→用户组→专家→登陆→密码KUKA→登陆
2019-07-15 07:48:36
MATLAB建立和控制图形窗口和坐标系命令建立和控制图形窗口 Figure 建立图形 Gcf 获取当前图形的句柄 Clf 清除当前图形 Close 关闭图形 建立和控制坐标
2009-09-22 16:00:57
TM4C TI PinMux工具使用教程记得以前TI的TM4C12x是有PinMux这个工具的电脑版的,可以自由的安装和使用,不过现在电脑版被放弃了,主打的是网络版。地址如下所示:https
2018-08-14 06:40:19
(原点)为(0,0)。Z位置, 底部/顶部 尽管窗口显示在以X和Y表示的二维屏幕上,但是WM也管理所谓的Z位置或深度坐标-- 虚拟的第三维上的位置,该坐标确定从背景到前景的位置。各窗口因此可在
2015-04-20 15:23:12
什么是C4ISR系统?
2021-06-10 10:43:14
之前简单介绍了一下Snapdragon Profiler工具,现在我们实际用它来分析一下Dragonboard410c。启动和配置1、我的系统是ubuntu16.04,直接在Terminal进入
2018-09-25 16:14:43
本帖最后由 一只耳朵怪 于 2018-5-28 10:31 编辑
跪求下各位大神,此电路如何工作的?C4端电压多少?三极管如何工作的?
2018-05-27 23:25:43
PH1013-2840库卡机器人KUKA主机维修KUKA驱动器模块维修C4库卡机器人驱动电源维修KPP600 3X64 KUKA机器人配件维修北京KUKA库卡机器人模块维修 KRC4 KPC4机械行业维修:西门子系统、法那克系统、沙迪克、FIDIA、天田、AMADA、友嘉、大宇系统;加工中心、..
2021-09-08 07:30:00
如题,新买的V1.8的板子 在晶振Y1旁边 C3和C4 没有焊接电容 这个算正常吗?
2019-04-26 02:00:53
板子电路图的C3 C4接的是22pf电容 为什么板子实际却没接这两个电容??
2020-06-16 09:00:20
求一个C4***的爆炸模仿音效,要STC98c52的,球大神,在线等。。
2014-11-21 12:33:11
我看NI有Robotics Toolkit for KUKA KR C2的附加包,这个怎么用啊?如何和kuka机器人建立通讯啊?是Tcp接口吗?
2023-10-21 20:59:28
转stemwin教程为了帮助大家更好的理解窗口管理器的回调和消息机制,本期教程专门做了三个相关的例子,帮助大家更好的理解。 34. 1用户自定义消息类型实例 34. 2 桌面窗口回调函数实例 34. 3 官方WM_Redraw.c实例 34. 4 总结
2016-10-16 10:43:41
请问该图中的C4电容两端的电压怎么求,希望能有详细点的解答过程,希望大神们不吝赐教。
2018-07-28 14:49:55
C1、C2?C3?C4?本人水平不够,提的问题简单,请不家帮忙指导下。。。非常感激!
2013-12-27 16:39:19
晶振12M,电感138nh,有公式可以计算C2 C3 C4?吗
2016-08-27 01:24:01
基FPGA Cyclone II_EP2C5 EP2C8的频率计
基FPGA_Cyclone_II_EP2C5/EP2C8的频率计
功能描述:按4*4键盘上的1,2,3...号按键可依次测出 25000000Hz ,12500000Hz ....的分
2008-11-30 12:17:01 87
87 文章介绍了基于C/S 结构信贷管理系统的设计与实现。该信息系统是基于C/S 结构、使用Delphi+Access+Rave5 作为开发平台而研发的信贷管理系统。文章阐述了该系统的设计方案,重点介
2009-09-03 14:50:347 GPS工具箱(坐标转换,线路设计)
2010-02-08 09:52:34124 用C#读取GPS数据的基类工具
2010-02-08 16:56:3324
3个时基窗口电路
2009-02-04 23:55:55 889
889 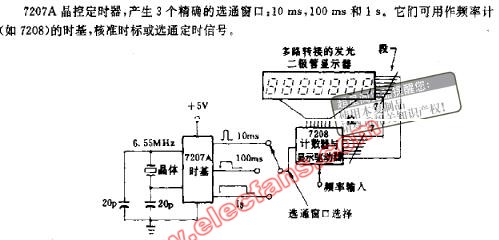
电子发烧友网站提供《图片转C语言工具bin2c.exe.rar》资料免费下载
2014-06-05 09:00:3424 KUKA机器人TCP(工具中心点)设定.
2015-12-23 14:50:4936 C#编程系列:电话客服管理系统。C#编程系列:电话客服管理系统。
2015-12-28 11:43:081 基于C语言编程的设计,很简单的图书管理系统设计
2016-02-22 17:54:430 c#报告(实验室管理系统),感兴趣的朋友下载来学习学习。
2016-03-22 17:29:510 C#教程之Popup窗口提醒,很好的C#资料,快来学习吧。
2016-04-20 09:59:3726 C#教程之弹出模式窗口显示进度条,很好的C#资料,快来学习吧。
2016-04-20 10:49:327 C#教程之获取鼠标坐标,很好的C#资料,快来学习吧。
2016-04-20 10:59:104 乘客管理系统C语言代码程序,乘客姓名,乘客金额,乘客下车站牌,排序,
2016-07-13 15:11:087 学生管理系统_C#毕业设计
2017-01-07 21:45:578 基于C#图书馆管理系统的实现与设计
2017-01-11 12:42:443 C#课程设计_图书管理系统【含需求】
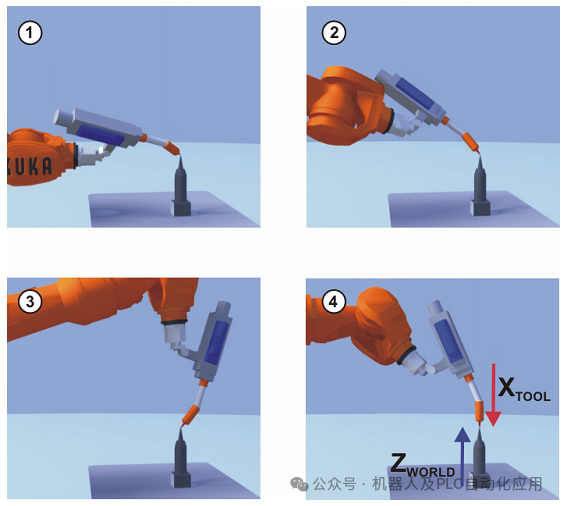
2017-02-07 15:05:000 KUKA机器人工具坐标系的建立执行方法:将待检测的工具安装在法兰上,找出一个合适的参考点 它可以是固定在工作空间的某一参考芯。
2017-10-16 15:15:349 随着当前我国互联网+经济体系的推广与实现,淘宝创业的用户与日增多,基于C2C模式下,优化设计淘宝创业网上销售管理系统已成为必然需求,本篇从系统的需求分析、总体结构设计、功能设计等方面,设计实现
2017-11-03 14:57:3211 本文提出了一种实时并且精准的人体检测架构C4。C4在目前最高精确度下可以达到20帧每秒的检测速度,并且是在只使用一个处理线程和不使用GPU等硬件的情况下达到的。能达到实时而精确的检测源于以下两点
2017-11-17 04:44:012672 
设计一套医疗设备的全过程动态管理信息系统。方法:分析系统的整体框架,将系统分成购置管理、资产管理、质量控制、维修管理、计量管理、公用设备管理、效益分析和档案管理八个子模块。系统采用多窗口C/S构架
2017-12-05 10:57:180 C语言创建windows窗口
2018-01-15 10:42:1311615 
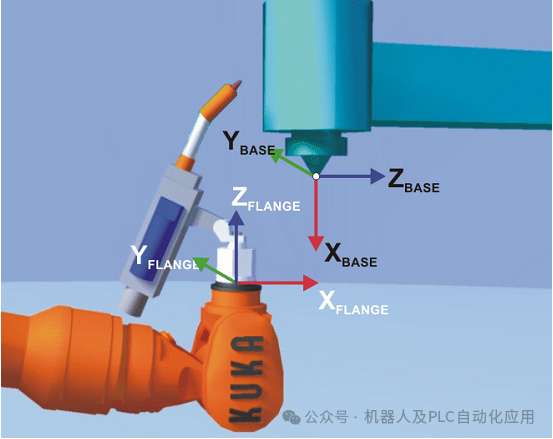
坐标系包含:
1、基坐标系(Base Coordinate System)
2、大地坐标系(World Coordinate System)
3、工具坐标系(Tool Coordinate System)
4、工件坐标系(Work Object Coordinate System)
2018-04-02 11:31:002473 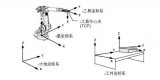
针对借助激光跟踪仪标定机器人所涉及的坐标系统一问题,对基于空间几何法拟合建立的基坐标系与机器人理论基坐标系的转换关系进行了研究,提出了一种基于对偶四元数法的机器人基坐标系标定方法。利用指数积公式推导
2018-03-07 10:43:522 C语言图书管理系统源代码
2018-03-24 11:59:2624 C4世嘉的1.6L车型作为厂家和消费者双方面都认同的销售主力,1.2THP更是环保与动力的双修好手,两款动力自推出以来便是吸睛至极,以至于车系中的旗舰1.6THP车型反而有点淡出大家视野的趋势。但问题是,它真有如此高高在上,以至于就该被束之高阁吗?
2018-07-12 09:50:006516 备受网友关注的东风雪铁龙C4 L在12月5日在上海上市,价格区间为12.39-16.99万元。C4 L是东风雪铁龙的一款介于C5与世嘉之间的车型,崭新的外观、2710mm的较长轴距以及科技感十足的内
2018-07-12 09:54:004790 备受网友关注的东风雪铁龙C4 L在12月5日在上海上市,价格区间为12.39-16.99万元。C4 L是东风雪铁龙的一款介于C5与世嘉之间的车型,崭新的外观、2710mm的较长轴距以及科技感十足的内
2018-06-27 14:55:0017750 在中国汽车技术研究中心公布的2016年度第二批C-NCAP测试结果中,东风雪铁龙C4世嘉以56.1的总分,荣膺五星安全评价。作为东风雪铁龙又一款摘得“五星”桂冠的车型,它在各项测试中均表现出色:正面
2018-06-25 08:56:003890 iDTronic推出新款安卓RFID移动读取器C4 Red。该设备支持移动设备管理(MDM),Android for Work及其他企业移动管理(EMM)系统。该公司称,该设备防护等级为IP65,适用于工业场景。
2019-01-11 14:42:361037 本文档的主要内容详细介绍的是库卡编程资料入门课件库卡机器人基础教程和库卡C4编程指南及焊接机器人教程合集免费下载包括了:KUKA基础培训之1-机器人系统的结构和功能,KUKA基础培训之2-机器人运动
2019-04-22 08:00:0042 现场应用日渐趋向全自动智能化,对人机协作的需求更加旺盛,KUKA LBR iiwa 机器人的身影也出现在各种适用场合。有人可能会有疑问:它与 KR C4 机器人有什么区别?
2019-07-08 15:07:592456 我们通过KUKA计算器或着运算程序可以得出:这个X向的偏差可以使工具坐标的X偏移9.848,Y方向偏移1.736A旋转10.0这就偏差的换算。表面上是工具的X方向 偏差,但是如果你想消除这个偏差你需要改变TOOL坐标的X,Y,和A来实现。
2020-05-10 10:22:508053 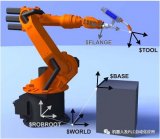
在 KRC4 中,DualNIC在设备管理器里面不是显示在【网络适配器】之下。该网卡不受 Windows、而受库卡实时操作系统 VX-Works 的管理,也不在 Windows里进行参数设置。因此
2020-06-12 11:09:323120 
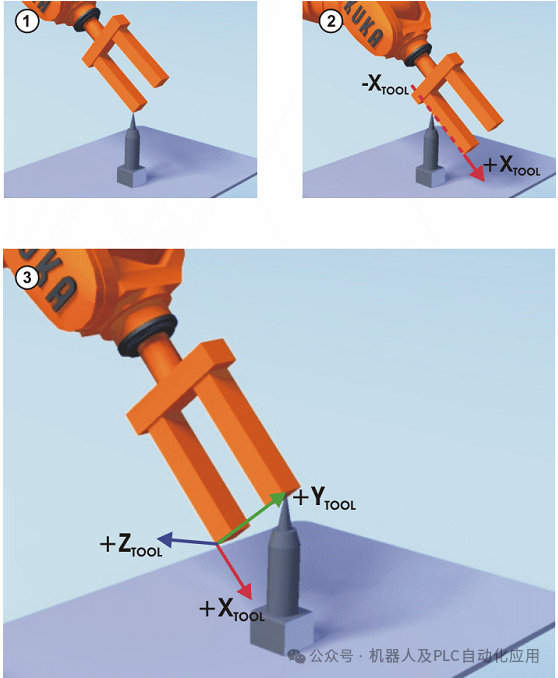
通过一个固定参考点的工具坐标系的测量分为2步:首先确定工具坐标系的TCP点,然后确定工具坐标系的姿态如表8-7所示
2020-06-30 16:03:4011208 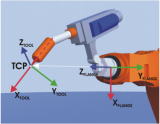
在全自动化生产线上,必须对过程进行监控和协调,例如状态监测和过程控制。这个任务通常由 PLC 来承担。为了使 PLC 和 KR C4 能通过 PROFINET互相通讯
2020-07-13 09:39:432646 通过 PROFINET 进行电源管理,这个千万不能和机器人节能功能混为一谈!
2020-09-03 14:20:014398 
利用诊断监视器可针对主系统的众多软件模块显示各种诊断数据。
2020-09-19 09:58:324717 
借助工业以太网进行电源管理,通过 PROFINET 进行电源管理 借助CapCtrl.xml 进行的工业以太网接口配置不是PROFIenergy的函数并且必须分开考虑。必须始终只配
2020-10-23 14:16:212480 
在 KR C4 上安装 PROFINET 选项 KUKA系统软件8.2或VW系统软件8.2以上: 1.连接通过控制器上提供使用的一个网络端口 KLI (DualNIC) 实现。 2.工业以太网协议
2020-10-27 18:11:448218 
控制RIP的USER程序在这里.正常情况下这个是大众统一的标准程序.我只能说出像问题的概率是很低的!我们要知道掉电极产生时,机器人程序会发生什么。
2020-11-07 10:59:302340 。 WORLD 世界坐标系 在供货状态下与 ROBROOT坐标系中一致。 可以从机器人足部 “ 向外移出 ”。 说明世界坐标系在 ROBROOT 坐标系中的位置。 此外,机器人系统为壁装与吊顶安装时使用。 BASE 基坐标系 是一个可自由定义、用户定制的坐标系说明基坐标在世界坐标
2020-12-23 17:41:206666 工具坐标的特点及用途 机器人控制系统通过测量工具 (工具坐标系)识别工具顶尖 ( TCP - Tool Center Point,即工具中心点 )相对于法兰中心点位于何处以及其方向如何。 因此
2021-01-19 09:17:3511582 HMC974LC3C:高速10 GHz窗口比较器数据表
2021-05-15 13:21:511 C语言开发工具开发工具和操作系统之间是相互促进的、相互发展的,操作系统离不开软件开发的支持,软件开发工具也离不开操作系统这个平台。Linux操作系统下Linux开发工具的开源方式,可以让大家拥有更多
2021-11-01 16:57:2413 库卡机器人有限公司培训资料之库卡机器人编程C4教程
2021-11-05 18:04:3311 。Keil4软件介绍2009年2月发布Keil uVision4,Keil uVision4引入灵活的窗口管理系统,使开发人员能够使用多台监视器,并提供了视觉上的表面对窗口位置的完全控制的任何地方。新的用户界面可以更好地利用屏幕空间和更有效地组织多个窗口,提供一个整洁,高效的环境来开发应用程
2021-11-29 13:21:0729 PH1013-2840库卡机器人KUKA主机维修KUKA驱动器模块维修C4库卡机器人驱动电源维修KPP600 3X64 KUKA机器人配件维修北京KUKA库卡机器人模块维修 KRC4 KPC4机械行业维修:西门子系统、法那克系统、沙迪克、FIDIA、天田、AMADA、友嘉、大宇系统;加工中心、..
2022-01-12 10:39:4011 KUKA C4 机器人报:KSS13012<{总线识别号}>ECat Stack初始化时出错可能的原因1.原因:在VorkVisual项目中RDC
2022-03-17 09:55:199171 U2C 文字转码工具,窗口绘制工具emwin免费下载。
2022-03-25 15:35:3415 电子发烧友网站提供《ESP 12E I2c基卡的I2C IO卡设计.zip》资料免费下载
2022-08-15 09:27:093 结构类型 FRAME 的变量指明基于 WORLD 坐标系的 ROBROOT 坐标系位置。
2022-10-26 11:16:082335 SynchroMove软件在 机器人D盘中的KUKA_OPT文件夹中。
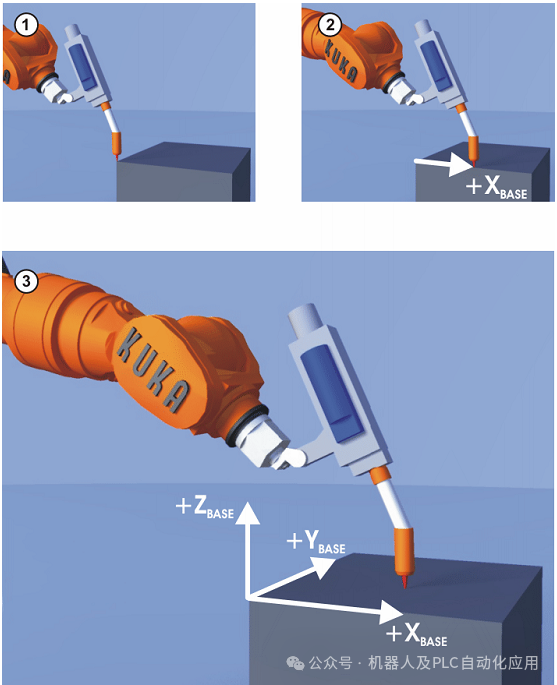
2022-11-29 09:55:112437 是一个可自由定义、用户定制的坐标系说明基坐标在世界坐标系中的位置。用于测量工件和装置。
2022-12-27 15:29:418355 在全自动化生产线上,必须对过程进行监控和协调,例如状态监测和过程控制。这个任务通常由 PLC 来承担。为了使 PLC 和 KR C4 能通过 PROFINET互相通讯,WorkVisual项目必须
2023-01-03 11:00:451175 2. 入门指南 3. 窗口结构-主要区域 4.如何使用STM32Cube-Monitor-UCPD 5.跟踪信息 6.故障排除 7.辅助资料 1.特性 STM32CubeMonitor-UCPD 该软件工具的主要功能如下: • 配置并监测意法半导体 Type-C Power Deliv
2023-03-21 09:45:052934 可以参照基坐标对这些点示教。如果必须移动基坐标,例如由于工作面被移动,这些点也随之移动,但不必重新进行示教。
可以保存多少 BASE 坐标系取决于 WorkVisual 中的配置。默认:32 个 BASE坐标系。变量:BASE_DATA[1 … 32]。
2023-04-19 12:48:425077 RIP的各元器件 1.控制RIP的USER程序在这里.正常情况下这个是大众统一的标准程序.我只能说出像问题的概率是很低的!我们要知道掉电极产生时,机器人程序会发生什么! 下图:机器人RIP. 从图片中我们知道机器人RIP的标准控制结构的阀体是不使用先导阀的直接由换向阀控制开关水,即A513/A515 . SP2 =上限值(帽被撕下) SP1 =较低的最大关断值 RP1 =较低的关闭值(阻止冷却) RP2 =上限值的最小值 设置流量监控器的值 大众标准规定设置值,但绝大多数现场是不能满足
2023-05-22 14:54:361002 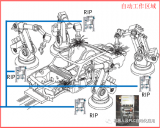
在首次接通连有机器人本体运动机构的 KR C4 时务必考虑以下步骤。 这些步骤不能取代首次投入运行的整个步骤! 1. 接通 KR C4。 2. 选择运行方式 T1。 3. 显示以下查询:"RDC
2023-05-29 14:21:226453 
电子发烧友网站提供《Elxflash离线工具窗口.zip》资料免费下载
2023-07-24 15:00:200 电子发烧友网站提供《Elxflash离线工具窗口下载.zip》资料免费下载
2023-07-29 10:17:560 C语言程序设计--学生信息管理系统
2023-08-01 00:38:383904 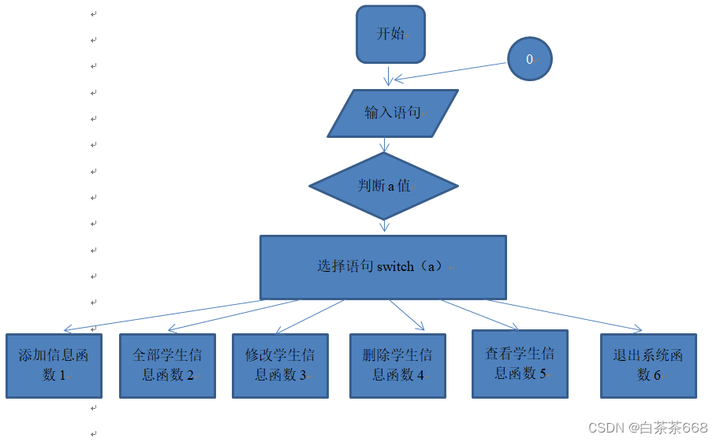
BPI-M5与Odroid C4和树莓派规格比较表
2023-09-04 16:42:511 智能工具管理系统-RFID工具管理系统 智能工具可视化管理系统(智工具DW-S308)是依托互3D技术、云计算、大数据、RFID技术、数据库技术、AI、视频分析技术对RFID工具进行统一管理、分析
2023-09-14 09:38:511696 
控制柜 (CCU)包含两块电路板 (CIB 控制柜接口板和 PMB 电源管理板),是机器人控制系统所有组件的配电装置和通讯接口。所有数据通过内部通讯传输给控制系统,并在那里继续处理。
2023-11-03 10:09:184633 
当时觉得很奇怪,教材里的同向放大器没有C4这个电容的。不过也很快搞明白了,就是做了一次测试,有电容和没有这个电容进行了对比,就很容易理解这个电容的作用了,起强直流负反馈的作用,坏处对频响应该不好。
2023-12-10 16:14:262022 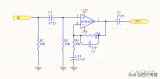
或者可以通过 WorkVisual 更改密码。如果在机器人控制系统上安装了 KUKA.NonAdmin,则只能通过 WorkVisual 更改该密码。
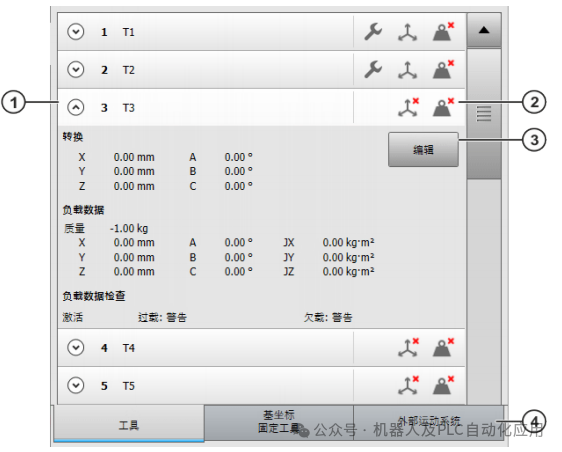
2023-12-12 17:11:362511 “概述”区域显示所有现有的TOOLS、BASES和外部运动学,每个都在一个单独的选项卡中。
2024-01-15 10:44:231105 
在当今竞争激烈的商业环境中,企业数字化管理升级是提高竞争力的关键。蔡司三坐标管理系统凭借其卓越的便捷性和强大功能,成为企业迈向高效数字化管理的理想选择。蔡司三坐标管理系统按模块设计,每个模块自身都是
2024-11-20 16:22:441052 
基美作为全球领先的电子元件制造商,其车规级多层陶瓷电容器(MLCC)在汽车电子领域具有广泛应用。其中,C2220C和C2225C系列是其车规电容中的代表性产品,具备高可靠性、高耐压和优异的温度稳定性
2025-08-26 17:06:541484 
基美是一家在电子元件制造领域享有盛誉的企业,其生产的通用贴片电容因卓越的性能和广泛的应用范围而备受青睐。今天,基美授权代理商南山电子就介绍一下基美通用贴片电容C0805C和C0805X系列产品特点
2025-09-01 14:43:22554 
基美(KEMET)是一家在电子元件领域享有盛誉的公司,其生产的贴片电容广泛应用于汽车电子、工业控制、通信设备等多种领域。今天,基美授权代理商南山电子介绍一下基美通用贴片电容C1210C、C
2025-09-03 16:34:19964 C0603C系列是基美公司推出的通用贴片电容,采用0603封装形式,尺寸为1.6mm×0.8mm×0.8mm,具有体积小、重量轻的特点,适合紧凑型设计需求。该系列电容广泛应用于各种电子设备中,可用
2025-09-11 17:07:04995
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论