,很简洁. 下载程序很简单,下好程序,用手柄测试,发现手柄没有附带电池.我得自己找两个7号电池,桌子上的空调遥控器的电池刚好能用. 手机app画面,很简易,就是一个按键对应一个动作组,操控蛮方便.开源机械臂单舵机操纵开源机械臂上位机操纵
2017-07-17 16:42:59
51单片机怎么处理机械臂数据
2023-10-31 06:29:13
机械臂仿真控制
2020-09-29 19:23:16
机械臂向前运动1cm,就是运动1cm)。这种控制在涉及到接触作业时就会产生麻烦,因为现实环境是充满各种误差的,位置上很小的误差,经过大刚度的放大会产生很大的接触力,误差被放大。在位置精度要求高的且环境
2022-02-23 07:49:01
正运动学反过来,对于我们的机械臂而言,也就是已知末端执行器的位置和朝向,求每个关节的角度。我们的机械臂的三维运动是比较复杂的,这里为了简化模型更加便于大家的理解,我们对模型进行精简,先去掉下方云台的...
2022-01-20 06:46:45
机械臂仿真,用什么软件效果比较好?
2018-01-18 16:50:01
上配置了一块64M的HyperRAM,用作图像存储进行锐化算法。三.机械臂控制部分使用树莓派做图像的接收和机械臂的控制,使用TensorFlow,预先训练的神经网络上运行简单的图像分类。然后对识别
2021-05-11 21:48:41
申请理由:申请了个基于leapmotion智能机械臂的创新项目,现在申请到了国家的补助,希望用蓝牙来完成传输部分,减少开发成本,完善开发稳定项目描述:体感的传感器基于leapmotion的摄像头和红外传感器,用蓝牙来传输数据到机械臂上,模仿人类的手部动作来完成机械臂的行动
2015-08-08 12:12:38
申请理由:随着工业机械臂的普及应用,现在机械臂运行动作单一,控制操作难度大已不满足现代工业的生产,机械臂也需改变以往工作方式。得知NanoPi M2功能强大,接口丰富,兼容多种系统,想开发一个由
2016-04-27 16:16:59
申请理由:本开发板具有强大的外设以及足够的运存及主频,可以完成简单的视觉识别处理以及机械臂的控制。希望通过这次实践能够学习A8架构的处理器的应用以及学习飞凌开发板的使用。将来在工作中可以使用该系
2015-07-22 01:47:11
项目名称:采用labview与FPGA的多自由度机械臂快速控制系统原型开发试用计划: 机械臂在自动化工业中广泛应用,由于每个自由度都有一对驱动-传感环节,多自由度下各环节的配合,动作完成的一致性需要
2016-12-19 15:30:56
项目名称:机械臂语音定位试用计划:1、使用拾音与语音识别功能,并调试WIFI连接功能2、调试语音反馈,在做语音控制的同时完成智能语音反馈3、设计机械臂用于恶劣环境下作业人员无法达到的地方,并且在无
2017-05-24 16:13:35
寿命。
通过上述方法,可以进一步优化机械臂和红外传感器的性能,从而提高整个系统的效率和准确性。
本人用Verilog编写的一个基本的机器视觉处理和目标识别程序(主要部分)
module
2024-02-01 20:18:17
面过,还会卡机械臂底盘,导致转不到位。(一)上位机运行用deepin笔记本跑的。图中演示的是识别出“水杯”在视野偏移角度+距离,分别生成指令,点击autorun会自动发送做一些动作(二)机械臂运行转过来,对正水杯(三)上位机软件基于QT框架,使用串口通讯,波特率115200:`
2020-02-08 18:13:01
项目名称:机械臂快速识别抓取系统试用计划:申请理由本人从两年前开始着手设计DIY创客机械臂,该机械臂主要围绕机器视觉和电机控制开展。其中机器视觉方面主要进行景深测量和物体识别。识别方面主要负责识别
2019-09-23 15:40:59
/修改几个配置文件,修改后再次启动demo.launch文件,就能看见FollowJointTrajectoryAction,具体方法会写在下一篇博文。这里先提前放个图,预览一下FollowJointTrajectoryAction的样子(红框内话题的前缀是机械臂的名字)。
2019-05-21 09:10:35
角度机械臂自动调整为平衡,可通过特殊动作键进行控制,控制版空间角度可通过按键完成),拍照,灯光控制。三:一键实现连贯动作四:二维码识别五:语音对话,测距避障模块六:电量,信号强弱显示,并进行提醒七:系统自动更新八:速度灯光等其他相关可调控属性的调整九:图传,双摄像头,操作界面需要可以相互切换
2017-05-05 10:53:30
:基础功能的遥控:底盘控制,机械臂控制(空间角度机械臂自动调整为平衡,可通过特殊动作键进行控制,控制版空间角度可通过按键完成),拍照,灯光控制。三:一键实现连贯动作四:二维码识别五:语音对话,测距避障模块六
2017-04-28 13:49:46
本帖最后由 tangwentao 于 2019-12-16 15:14 编辑背景: 公司本来搞软件的,现在跟别人合作,要搞个机械臂的东西。要求: 1.这个机械臂要搭载一个摄像头,然后由于机械臂的运动
2019-12-16 15:33:13
毕设要求做机械手臂的仿真,表示菜鸟找不到机械臂控件也不知道怎么画,求好心大侠指导
2015-05-04 13:31:23
定位系统,满足物理科学研究员和军事应用工程师的需求。将商业机器人和我们正在申请专利的三球机械臂集成到全新和现有的工作单元中,通过提高现有工业标准的效率和精度,帮助改进性能。 专业项目 三球机械臂允许
2015-02-12 15:56:16
功能,将模块分为头部动作识别单元和机械手部分。2头部运动测量单元设计头部运动识别单元采用三轴数字陀螺仪与三轴加速度传感器融合的策略。将采集到的信息经过数字滤波处理后,估算出头部的运动姿态,通过无线单元
2019-06-18 05:00:14
如何对机械臂的关节速度进行动态绘图?
2021-11-03 06:05:38
目的 本文手把手教你如何在 Mathematica 软件中搭建机械臂的三维仿真环境,包括以下几部分: 1. 如何导入机械臂的三维模型; 2. 如何进行(正/逆)运动学仿真; 3.
2021-09-07 09:25:13
请教各位,对于布尔控件的机械动作图标,如何显示,我试图将开关按钮改成机械图标,但是点击机械图标,无任何反应
2019-04-19 18:24:24
如何通过arduino单片机和机械臂零件设计一个手柄操控自学习机械臂模型?
2022-01-24 06:37:22
。该机械臂有六个关节,六轴联动;主要用于蒸汽发生器(SG)一回路侧检修活动。机械臂的手端装有适配器,可以携挂不同的检修工具,即可根据需要对蒸汽发生器实施不同程度的维护。 由于该机械臂的工作环境
2011-09-29 17:02:53
工具,即可根据需要对蒸汽发生器实施不同程度的维护。 由于该机械臂的工作环境的特殊性,所以对机械臂整个控制系统的可靠性提出了更高的要求,这就需要良好的硬件电路设计、功能更强大的微处理器和更好的软件实现
2011-09-29 17:07:12
工业机械臂搬运工第一章绪论1.1 本课题研究的背景及意义1.2 机械臂在工业的应用现状1.3 本课题研究内容第二章机械臂工作流程2.1 步进电机工作的基本原理2.2 按键控制步进电机工艺流程2.3
2021-11-29 07:19:20
机械臂做出各种变化灵活的动作时,物联网能够起到跟踪的作用,并且将信号传递到计算机中,达到远程控制的效果,这种机械臂,操作者可以直接通过物联网来直接控制,操作简单,直观,并且可以完成复杂的动作。由于现有
2019-03-11 14:12:09
`一、产品介绍: 小型四轴码垛工业机器人是由一款桌面级四轴开源迷你机器臂组成,配合本系统的二轴或者单轴机械爪可组成六轴或五轴机器人,采用铝合金材质铸造,步进电机伺服控制系统,两个机器人均为等比例
2015-10-23 11:26:44
:是一套完全开源的系统平台,增强型机械臂拥有一套图形化编程软件,即用户不需要懂任何编程的知识,只需要通过计算机电脑通过图像拖拽机械臂就能够对机器人进行动作录制编程,简单易懂,甚至一般中学生十分钟就能
2015-10-23 11:29:03
如何实现基于Arduino的PS2机械臂偏小车的设计?
2021-10-19 06:02:01
方面都有应用,比如Wii、手机感应游戏、四桨飞行器等,但是目前很少甚至没有将其用在MP3控制上的。当今的电子产品的一大潮流就是用动作控制。试想一下一个没有任何触摸、机械按键的MP3,只要你前后左右
2019-10-11 08:31:08
实现连贯动作四:二维码识别五:语音对话,测距避障模块六:电量,信号强弱显示,并进行提醒七:系统自动更新八:速度灯光等其他相关可调控属性的调整九:双摄像头,操作界面需要可以相互切换 底盘和机械臂已经做出来了,有感兴趣的吗?或者提点功能上的建议
2017-04-26 16:48:42
智能小车如何与机械臂相结合?
2021-12-27 06:15:24
D-H法机械臂建模D-H建模方法是由D和H两个人提出的,是用于机器人运动学上的建模方法,该方法是在每个连杆上建立一个坐标系,通过齐次变换来实现两个连杆上的坐标变换。通过依次的变换最终可以推导处末端
2022-01-20 08:12:46
,使用寿命更长。传统金属材质机械臂的性能缺陷如下:传统机械臂为不锈钢或铝合金制品。其强度短时间内可以保证。但因金属构件自重大,长期疲劳作用下易产生局部的永久性累积损伤,直至最后发生断裂而导致设备出现故障,甚至造成意外事故。
2020-04-24 14:37:59
舵机怎么调机械臂
2016-07-30 09:01:45
基于stm32基础上通过语音模块控制机械臂的运行,可以控制机械臂进行前后左右活动,并且记忆运行动作
2019-02-07 12:51:28
专攻,不同环境下对定位的需求不同,以定位精度为例,有些区间存在型定位即可满足,有些区间需要分米乃至厘米级的高精度定位,这考验的是定位服务商的品控和对部署环境的深入理解。电厂属于设备多、危险性高、结构
2020-09-01 17:50:20
请问如何通过ROS控制真实机械臂?
2021-10-13 08:25:50
蒸发波导是海洋大气环境中一种常见的自然现象,受其影响,雷达常常出现如超视距探测等异常特征。该文主要针对如何准确评估蒸发波导环境下雷达的探测能力问题,利用电磁
2008-12-14 11:13:33 12
12 在变强噪音的情况下,语音识别的正确率会迅速下降;当噪声较强并且强度不断发生变化的时候,端点检测是一个难题;提出了两种方法保证噪声较强而且强度不断发生改变情况下
2009-07-10 15:34:3235 工厂机械臂人员闯入自动预警系统基于AI视觉图像识别算法,工厂机械臂人员闯入自动预警系统通过实时监测工作区域内的人员位置和机械臂设备的运行状态,实现对人员闯入的识别和预警。一旦系统检测到人员闯入作业区
2024-08-27 20:32:40
为了使六自由度机械臂完成特定的动作, 需要设计计算相应的指令序列. 首先计算了机械臂位姿与指尖位置之间的关系公式, 然后针对机械臂的到达问题、沿曲线运动问题和避障问题, 分别
2012-02-17 16:55:04193 评估人工耳蜗(CI)植入者在噪声环境下的言语识别能力。方法:利用普通话版噪声下言语测试(MHINT)为言语测试工具,选取22例CI受试者,按照MHINT适应性得分
2012-03-08 14:54:2120 空间的规划与机械臂目标点的坐标位姿函数相关,必须通过机械臂的逆向运动学求解,如此可获取各个关节变量的函数。笛卡尔空间的轨迹规划方法中的网弧插值法适用于所研究主从机械臂运动状态,主从机械臂最基本的要求是在起点与目标
2017-11-03 10:26:0110 针对家庭服务机器人机械臂高安全性和低算法复杂度的两大需求,提出一种基于空间代价地图的机械臂运动规划新方法。利用空间代价地图来描述机械臂与约束条件发生冲突的可能性,以概率分析代替简单的布尔判断,提供了
2017-11-25 11:47:019 的工作,既可以在很大程度上保障宇航员的安全,也可以提高工作的效率,而且还可以提高经济效益。空间机械臂是一种多体系统,因而可以采用多体系统的建模方法。对于处在自由漂浮状态下的空间机械臂来说,臂杆的运动会影响
2018-01-29 14:47:041 针对取件机械臂存在的绝对定位精度低、成本高等问题,采用基于定位精度可靠度的评价方法对机械臂进行了可靠性优化设计。使用多体系统理论建立了机械臂的静态误差模型,基于蒙特卡罗法对其定位精度进行了分析,并得
2018-03-02 15:11:143 连续型机械臂是一种新型仿生机械臂,通过模拟象鼻或章鱼触手的运动方式来实现多自由度作业。从1999年提出连续型机械臂的概念以来,国内外研究团队已经提出了很多种设计方案与较为成熟的运动学模型。目前国内
2018-03-05 13:48:580 工况下空间机械臂运动特性进行了分析,建立了系统在受到外部扰动时的动力学模型,并对动力学特性进行了归纳,提出了一种基于模糊递归神经网络的控制策略。根据李雅普诺夫第二类方法,证明了整个闭环控制系统的运动渐进稳定
2018-03-10 11:34:592 针对气动人工肌肉驱动单关节机械臂存在严重的非线性问题,提出一种自抗扰控制策略,来改善单关节机械臂的控制效果。对于给出的不精确系统模型,首先利用跟踪微分器安排输入信号的过渡过程,从而有效地解决了系统
2018-03-14 16:38:512 针对机械臂的设计特点和技术难点,对机械臂的本体结构进行了研究,提出了一种全新的模块化设计方法,该方法通过Solid-works建立了机械臂三维模型,进行了模块化机械臂伺服单元的设计。首先,对机械臂
2018-03-15 16:33:323 跟踪控制器采用最优反馈控制律,可确保机械臂按参考轨迹运动;而约束预测控制器则在考虑机械臂物理约束的情况下,为跟踪控制器提供最优参考轨迹。以DSP作为核心控制器,搭建了机械臂控制系统,同时给出了硬件和软件设计方法
2018-03-26 09:33:041 针对提高视觉图像特征与优化控制之间契合度的问题,本文提出一种基于深度强化学习的机械臂视觉抓取控制优化方法,可以自主地从与环境交互产生的视觉图像中不断学习特征提取,直接地将提取的特征应用于机械臂抓取
2018-12-19 15:23:5922 运动学和动力学分析对机械臂的研究具有很重要的作用。以往对机械臂的研究方法均需要建立复杂的数学模型和程序,而 SimMechanics 具有简单、快捷获取动态系统的模型的功能,并且系统建模方便直观
2019-11-12 08:00:001 机械臂是制造业中最常见的机器人之一。在大多数情况下,机械臂都是可编程的,可用于执行特定任务,通常用于制造、制造和工业应用。
2020-09-29 10:09:27 3874
3874 主要阐述机械臂手册的使用说明。
2021-03-22 16:09:3017 基于YOLOv3等的机械臂药盒智能抓取方法
2021-06-23 15:43:2561 动作识别网络 深度学习在人体动作识别领域有两类主要的网络,一类是基于姿态评估,基于关键点实现的动作识别网络;另外一类是直接预测的动作识别网络。关于姿态评估相关的网络模型应用,我们在前面的文章中已经
2021-06-25 10:32:073212 
工业机械臂搬运工第一章 绪 论1.1 本课题研究的背景及意义1.2 机械臂在工业的应用现状1.3 本课题研究内容第二章 机械臂工作流程2.1 步进电机工作的基本原理2.2 按键控制步进电机
2021-11-19 12:21:0872 机械臂向前运动1cm,就是运动1cm)。这种控制在涉及到接触作业时就会产生麻烦,因为现实环境是充满各种误差的,位置上很小的误差,经过大刚度的放大会产生很大的接触力,误差被放大。在位置精度要求高的且环境
2021-12-31 18:57:3111 小机械臂进行解锁后,小机械臂在轨测试逐步展开。科研人员首先对机械臂的各项产品进行检查,其检查内容主要包括了控制器状态确认、关节检查、末端检查等。
2022-08-29 15:39:461217 这一节我们开始第一个程序,就是机械臂各关节的运动。让我们首先打开Mycobot,然后登入一个终端,我们输入“python”进入python环境。 我们采用一边实验一边介绍MyCobot机械臂
2022-09-30 18:08:211929 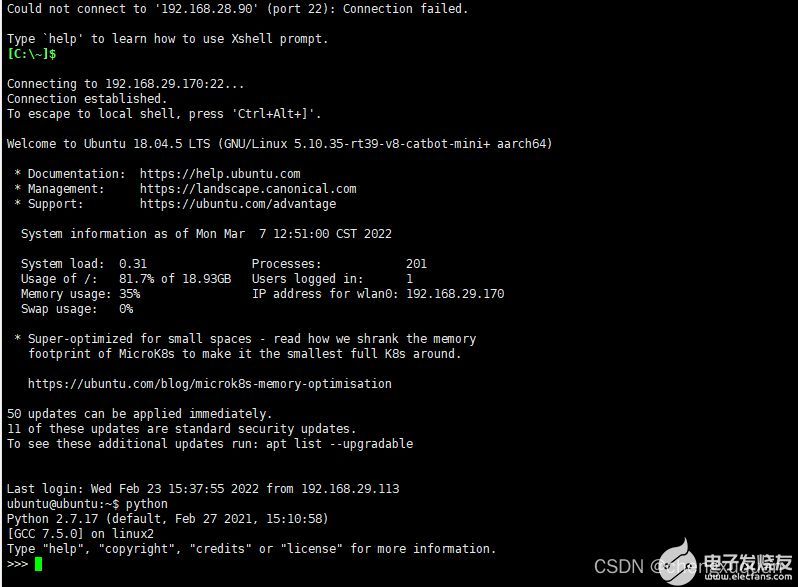
一直在纠结是先讲头部运动,还是先讲空间坐标系,后来决定还是先讲头部运动,让大家先感受一下机械臂在空间中是怎么定位的,然后我们下一节将详细介绍机械臂的空间坐标是怎么回事。空间坐标是一项非常复杂且需要
2022-10-10 17:30:411478 
电子发烧友网站提供《借助手部动作控制机械臂的手语翻译成文本和语音手套.zip》资料免费下载
2022-10-21 11:57:560 电子发烧友网站提供《机械臂制作案例.zip》资料免费下载
2022-10-28 09:26:596 电子发烧友网站提供《DIY机械臂.zip》资料免费下载
2022-11-08 10:32:222 电子发烧友网站提供《迷你机械臂构建.zip》资料免费下载
2022-11-11 11:16:040 未来的趋势绝对是机器人代替人工作业,机械臂首当其冲。如今机械臂工业化已经比较成熟,许多人都开始对机械臂感兴趣,想要学习的话手里肯定得有一台机械臂帮助学习,那么选择一款机械臂是相当重要的一个步骤。因为
2022-12-09 17:41:502887 
电子发烧友网站提供《最简单的机械臂.zip》资料免费下载
2022-12-13 11:03:311 ,让机械臂末端实现人脸识别和跟踪的功能,也有看到有人实现了机械臂末端物体的动态跟踪,看着这个项目好像很容易实现,让我来试一试吧! 项目设备 本次项目需要的设备在下表格里。 mechArm 270-Pi 这是一款 大象机器人 生产
2023-01-10 14:36:252860 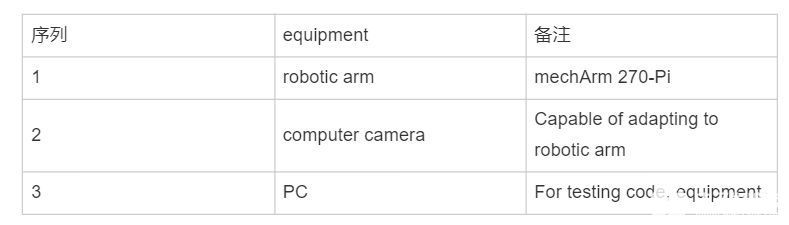
电子发烧友网站提供《人臂控制机械臂开源.zip》资料免费下载
2023-01-31 14:43:054 电子发烧友网站提供《如何制作机械臂.zip》资料免费下载
2023-02-08 09:46:060 使用一个桌面型的六轴机械臂,在机械臂的末端安装一个摄像头,来进行 人脸识别和跟踪 的一个功能。该功能分为两个模块,一个是 人脸识别模块 ,另一个是 机械臂的运动控制模块 。 在前文有介绍到
2023-02-10 16:07:282624 
近期回校上最后一门课,刚好是做机械臂有关的题目,所以写文记录一下。主要实现的是可以自动识别获取快递位置,机械臂可以抓取快递,以及根据自动识别快递上的条形码获得目的地点,机械臂可
以将快递抓取并移动
2023-05-18 10:53:415 电子发烧友网站提供《PC控制的机械臂设计.zip》资料免费下载
2023-06-12 10:41:592 电子发烧友网站提供《机械臂:Arduino + Matlab.zip》资料免费下载
2023-06-28 15:28:322 CNLINKO凌科电气机械臂是工业领域非常重要的一类机器人,它在重复大量工作,可出入恶劣危险环境等方面优势独具,因而在工业领域有着非同一般的地位。对于机械臂,如何在工业、恶劣环境下保持持续稳定可靠
2023-11-01 08:14:201105 
刚性机械臂 机械臂建模是机械臂控制的基础,控制效果的好坏很大程度上决定于所建立的动力学模型的准确性。 目前对刚性机械臂的动力学建模方法较多,理论较为成熟。而对于柔性空间机械臂的精确建模尚处在研究阶段
2023-11-17 17:03:341706 柔性机械臂 刚性机械臂建模方法已经可以有效地求解出机械臂各部分之间的耦合情况,但是对于柔性机械臂的动力学建模其侧重点在于基于刚性机械臂建模方法的基础上如何有效的处理机械臂关节柔性以及臂杆柔性
2023-11-17 17:12:051680 介绍 今天,我将向大家展示一个我独立设计并实现的机械臂模型。这个模型的核心功能是实现实时的手势追踪——只需用手轻轻拖拽,机械臂就能立即跟随你的动作进行移动。 我之所以想要创造这样一个模型,是因为在
2023-11-28 15:58:492038 
处理技术,使用ArUco标记的机械臂系统可以实现更高级的自动化功能,如精确定位、导航和复杂动作的执行。 本案例旨在展示结合ArUco标记和机械臂运动控制技术,实现对机械臂的高精度控制和姿态跟踪。通过分析和解释脚本的不同组成部分
2023-12-18 11:14:572221 
调试的过程中,出现了一些问题,在识别收拾的时候,它是一直识别,这就意味着如果在1s中内识别了10次的话,会给机械臂发送10个命令,这样肯定不是我一开始所设想的。我一开始的想法是,当相机识别到手势的时候就会给机械臂发送一条控制命令,这里我们先简单的设置一个让机械臂点头的动作。到这里手势的识别就完成了。
2024-01-31 14:39:351392 
控制性能。 精度衡量:直接测量机械臂末端的位置比较困难,这里采用一种近似的方式,比较机械臂各轴指令角度与实际编码器反馈角度间的偏差值。 2.控制策略 三环反馈伺服控制 这种位置控制方式是大家最为熟悉的。 此时控制都是
2024-03-05 08:43:252334 
六维力传感器是一种特殊的力觉传感器,可以测量物体在笛卡尔坐标系下三个轴向的力和力矩,其内部采用高度敏感的材料和精密机械构造,可以为机械臂提供更高的测量精度,满足不同场景下的测量需求。作为机械臂感知
2024-06-06 13:49:021901 
国产Cortex-A55高性能人工智能实验箱机械臂姿态识别案例
2024-07-19 08:32:36730 
智能目标颜色识别抓取丨国产Cortex-A55人工智能实验箱机械臂案例分享
2024-08-10 08:32:42984 众多与会者的驻足关注,他们对这款智能机械臂表现出极大的热情。此款机械臂能对积木颜色进行识别,将积木搬运到对应区域,可应用于垃圾分拣及工业、物流、医疗领域。那么今天
2024-08-19 16:42:551687 
智能机械臂人脸识别特效丨国产Cortex-A55人工智能实验箱案例分享
2024-08-30 13:03:581118 基于语音控制实现机械臂特定动作的方法。三、实验原理程序功能通过语音控制机械臂实现特定复杂动作:机械臂叠罗汉机械臂跳舞机械臂夹方块机械臂搬运语音控制模块如图示为语音
2024-12-12 19:01:461952 一、产品简介TL3568-PlusTEB人工智能实验箱国产高性能处理器64位4核低功耗2.0GHz超高主频1T超高算力NPU兼容鸿蒙等国产操作系统二、实验目的1、了解机械臂识别颜色抓取积木的基本流程
2025-01-15 08:07:561347 什么是机械冲击试验机械冲击试验是一种模拟产品在实际使用、运输和存储过程中可能遭受的冲击环境的实验室检测方法。其核心在于通过模拟突发、急剧且非周期性的冲击,评估产品在极端条件下的功能表现和性能失效情况
2025-03-06 17:20:021103 
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论