本文提出了一种用于具有双目视觉的自主机器人的三维语义场景感知的端到端流程。该流程包括实例分割、特征匹配和点集配准。首先,利用RGB图像进行单视图三维语义场景分割,将2D数据集中的常见对象类封装为物体实例的点云。
2024-02-21 15:55:38 1596
1596 
描述2D 执行器在 X/Y 2D 空间中移动微型机器人有区别:- 我正在使用另一个移动轨道配置- 控制是三相单极对四相双极- 我的机械手 (mBot) 使用 4 个磁铁并且不悬浮- 对于一维移动,我
2022-07-25 06:33:03
:三菱机器人简介+电气基本知识介绍 下午:在SolidWorks中导入三菱机器人模型 2.上机实践课:上午:三菱机器人硬件知识讲解,手动接线 下午:轮流真机实践,简单手动编程 3.理论仿真: 上午
2015-03-03 13:11:28
CAD是目前工业制造产品设计的重要软件之一,广泛应用于机械、建筑等领域。而常用的CAD软件,也就是所谓的三维制图软件,较二维的图纸和二维的绘图软件,三维CAD软件能够更加直观、准确地反映实体和特征
2019-07-03 07:06:31
有没有机器人比较全的资料
2017-03-21 12:35:21
请各位大神指导,移动式机器人是怎么做EMC保护的,机器人是锂电池供电,所以就不能接大地了,那么对机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
R15.06)给出了机器人的设计和应用要求,关于协作运行也有一些要求。一般而言,这些标准倡导的安全完整性要求是SIL 2、HFT = 1(根据IEC 62061)或PL d、CAT 3(根据ISO 13849
2018-10-30 11:33:11
labview 视觉机器人抓取工件 CCD相机的二维坐标系的建立?希望分享,谢谢
2017-08-18 20:53:37
机器人的运动原理还是属于最基本的简单机械。机器人运动主要是依靠什么装置?有些什么装置是机器人用的比较多的?
2015-02-03 11:22:01
想弄一个vi可以动态显示机器人的姿态,但不知道有什么函数可以引入机器人的模型,帮帮忙,谢谢。
2012-02-11 17:25:22
机器人有哪些类型?
2021-06-18 06:41:57
机器人的优缺点有哪些?机器人是由哪些部分组成的?
2021-10-11 07:51:29
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
机器人视觉可使工业机器人拥有感知和决策能力,以适应更多“机器换人”的生产场景。2. 工业机器人可通过双目或多目技术、激光相机技术、三维传感器技术等实现智能的视觉功能,进而摆脱人为操控限制,大幅提高生产
2019-08-16 04:00:00
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
技术的迅速发展,越来越多的研究者采用摄像机作为全自主用移动机器人的感知传感器。这主要是因为原来的超声或红外传感器感知信息量有限,鲁棒性差,而视觉系统则可以弥补这些缺点。而现实世界是三维的,而投射于摄像
2019-06-08 08:30:00
``机器人部件检测应用案例一、需求描述高速发展的现代社会,机器人的应用越来越广泛,机器人的品质要求也越来越高,因此,准确的获取并检测机器人部件的三维数据成了关键。由于机器人零部件结构复杂,曲面较多
2017-07-27 14:57:46
ZLDS200 2D传感器扫描得到的测量数据,可以做出三维轮廓坐标图及三维轮廓模拟图吗?
2015-12-23 07:57:19
工艺、抛光打磨工艺、装配工艺等工业机器人*典型应用,不仅满足了职业院校不同专业学生针对工业机器人的操作和编程的教学需求,完全来源于工业应用现场的特征也使该工作站更加适合于作为职业技能竞赛平台。工作站深度集成了离线编程技术,软件中不仅包含了与硬件平台的相符三维模型资源,还大大简化了涂胶及搬运码垛...
2021-07-01 12:24:19
)仿生六足机器人开发流程以及细节仿生六足机器人三维模型简图论文、D-H数学模型 、程序、硬件原理图至附件下载
2014-03-27 18:51:05
,互联网行业占成熟经济体的GDP增长的21%,世界经济正面向数字经济转型的大趋势。具身智能机器人集成人工智能、高端制造、新材料等技术,其核心在于通过智能体与环境的动态互动实现智能行为。
在第2章“具身
2024-12-19 22:26:26
激光通过墙面反射光线,使用ARM芯片处理图像数据计算距离,传值至上位机,上位机分析传回的数据建进行三维建模,构造出具有准确坐标意义、实际价值的模型。可用于机器人导航定位、障碍物检测与规避安防、路径规划等实际运用。
2015-12-02 16:10:59
的知识,还需要对ROS 2的节点通信和数据处理有一定的了解。通过实践这一部分内容,我掌握了如何在ROS 2中实现二维码识别,这对于提高机器人的智能性和交互性具有重要意义。
地图构建:SLAM技术
2025-04-27 11:42:22
:
一、机器人视觉:从理论到实践
第7章详细介绍了ROS2在机器视觉领域的应用,涵盖了相机标定、OpenCV集成、视觉巡线、二维码识别以及深度学习目标检测等内容。通过学习,我认识到:
相机标定的重要性
2025-05-03 19:41:47
`内容简介本书是关于机器人学和机器视觉的实用参考书, 第一部分“基础知识”(第2章和第3章)介绍机器人及其操作对象的位置和姿态描述,以及机器人路径和运动的表示方法;第二部分“移动机器人”(第4章至第
2018-01-17 17:38:11
`内容简介本书是关于机器人学和机器视觉的实用参考书, 第一部分“基础知识”(第2章和第3章)介绍机器人及其操作对象的位置和姿态描述,以及机器人路径和运动的表示方法;第二部分“移动机器人”(第4章至第
2018-04-08 18:19:42
智能机器人项目实战(免费)本课程着眼于实际应用,循序渐进的进行机器人实战;并在实战中提升基础能力,从结构设计基础、三维设计软件的应用、运动学和动力学仿真、C语言基础、单片机的应用、嵌入式开发、高级
2014-02-23 14:42:46
用sketchup绘制的全地形家用机器人的三维设计草图创意,设计不完美,也没有经过论证和实验,各位高手看看,此种设计是否具有可行性。
2017-08-09 17:32:57
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
传感网小编了解,智能焊接机器人利用3D视觉传感器对待焊接工件进行感知,获取工件的三维点云,并利用机器视觉技术与人工智能技术结合获得精确的焊接边缘,实现机器人的自主焊接。智能打磨/抛光机器人采用三维视觉
2018-11-28 10:59:55
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-07-05 07:08:47
工业机器人的四大特征是哪些?工业机器人是由哪些部分组成的?工业机器人是怎样进行划分的?
2021-10-11 09:10:17
`华南机器人应用培训中心拥有各种设备,开展各种不同的机器人培训班。打造各种工业现场常见的机器人工作站,现开展KUKA、发那科、三菱、ABB、爱普生工业机器人培训对外招生。 一、认识机器人技术:工业
2015-09-02 14:03:18
目的 本文手把手教你在 Mathematica 科学计算软件中搭建机器人的仿真环境,具体包括以下内容: 1 导入机械臂的三维模型 2 正\逆运动学仿真 3 碰撞检测 4 轨迹规划 5 正\逆动力学仿真 6 运动控制 文中的代码和模型文件点击此处下载,
2021-09-07 07:38:54
基本工作单元,以滚珠丝杆、同步皮带、齿轮齿条为常用的传动方式所架构起来的机器人系统,可以完成在XYZ三维坐标系中任意一点的到达和遵循可控的运动轨迹。多轴机器人采用运动控制系统实现对其的驱动及编程控制,直线
2020-07-29 06:57:04
基于RGB-D相机与机械臂的三维重建无序抓取系统有哪些关键技术?如何去开发一款基于RGB-D相机与机械臂的三维重建无序抓取系统?基于RGB-D相机与机械臂的三维重建无序抓取系统是由哪些部分组成的?
2021-09-08 06:12:06
目的 本文手把手教你如何在 Mathematica 软件中搭建机械臂的三维仿真环境,包括以下几部分: 1. 如何导入机械臂的三维模型; 2. 如何进行(正/逆)运动学仿真; 3.
2021-09-07 09:25:13
完整任务内容1.按照课件上 gazebo 仿真内容,完成 gazebo 环境设置(包括家具和障碍物)、机器人传感器(camera、kinect、Lidar)安装,用键盘控制机器人的行走,并在
2021-12-17 07:10:32
如题。在论坛有看到家用机器人的2014年度十大款类型。比较感兴趣,不知道有没有大神了解比较全面的家用机器人知识?
2015-02-11 11:16:00
的2D视觉系统已经可以定位大多数堆叠于箱柜内部隔板顶层的部件。 这种应用一般的方法就是使用一个安装在箱柜上的摄像机来定位部件。摄像机安装在足够的高度,因此机器人可以在摄像机底下移动并进入箱柜内部。在每
2018-10-26 16:31:33
各种类型的机器人(如2图):①直角坐标型(如2图a是三个直线坐标轴);②圆柱坐标型(如2图b是两个直线坐标轴和一个回转轴);③球坐标型(如2图c是一个直线坐标轴和两个回转轴);④关节型(如2图d是三
2015-01-19 10:36:12
目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是Mathematica 11.1,更早的版本可能缺少某些函数,所以请使用最新版。。 1 导入机械臂的三维模型 2 (正/逆)运动学仿真 3 碰撞检测 4 轨迹规划 5 (正/逆...
2021-09-07 07:05:19
关于ros智能机器人,就是一个写智能机器人代码的一个虚拟机,
2021-10-13 19:20:16
起步较晚,随着扫地机器人功能更完善,智能化程度更高,预计未来中国沿海发达地区扫地机器人渗透率水平会达到美国扫地机器人目前的渗透率水平。2.本文编写目的本文主要介绍通过智能WiFi控制技术实现手机微信控制
2017-05-27 13:31:20
一个可持续旋转的三维激光扫描仪、八个多向视野的彩色数码相机、三个全景超清晰彩色监控摄像头及其广角镜头监控摄像头。此外,这种智能机器人还可以识别关节和扭矩,武器配备了精确的惯性力测量模块。 “救援
2020-11-30 15:10:15
跟踪等领域。不同种类的机器人由于工作的重点不一样,它的视觉系统在软件或硬件上都有着细微的差别。本文研究基于服务机器人的单目视觉系统。它处理的是二维图像,是基于对无遮挡物体颜色和形状的识别以及3D目标物体的平动跟踪。
2020-04-07 07:27:24
寻求KUKA机器人控制柜三维模型,做方案有时需要用到,大家谁有可以给我发一份吗?先谢谢了
2016-04-18 16:05:43
想要用三维球面画一个三维球体,我已经画出一个球体了,但是不知道属性怎么设置才能设置成图片那样的,我觉得应该是设置的问题,我设置了好多遍都没办法设置成想要的样子,请高手赐教!!
2019-05-03 19:46:58
的检测以及定位等功能,二维视觉传感器已经出现了很长时间,许多智能相机可以配合协调工业机器人的行动路线,根据接收到的信息对机器人的行为进行调整。三维视觉传感器,资料图2.三维视觉传感器最近三维视觉传感器
2018-11-08 15:52:28
我是新人,求帮助啊,明天需要提交轮式机器人应用的报告,求大神给点建议,可用轮式机器人应用于那些方面,要求实际可行,应用于生活,农业,军事都可以,谢谢啦
2013-04-17 16:32:16
机器人视觉系统是指用计算机来实现人的视觉功能,也就是用计算机来实现对客观的三维世界的识别。人类接收的信息70%以上来自视觉,人类视觉为人类提供了关于周围环境 最详细可靠的信息。人类视觉所具有的强大
2018-12-13 21:23:57
中,为了评价残疾、诊断疾病和鉴定康复器械的效果,客观而有效的方法就是进行人体运动三维仿真与分析系统步态分析和人体其它部位的功能评定;如图1所示为运动康复模拟实验。科天健在该项目中,采用六~八台高速相机组成的三
2016-06-07 11:35:24
江智党建机器人是经过多年的市场沉淀 ;现已可以提供系统 全方位的党建机器人服务
2022-06-21 07:59:59
提出了一种微小爬壁机器人三维位置测量的新方法。笔者通过深入分析研究各种位置测控方法与系统,提出采用单目视觉方法中的聚焦法,以CCD 作为传感器,用三点法实现对机器人的三
2009-07-06 09:40:28 7
7 泰科关节机器人具备哪些优势? 一、编程简单可以让无编程经验的操作人员能快速设置和操作我们的直观、3D 可视化协作式机器人。只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏
2023-04-19 15:13:28
教育机器人三维软件系统的设计与实现::在中小学教育机器人领域,引入并实现了教育机器人的虚拟制造,实现了教育机器人的三维流程图编程和基于虚拟现实技术的教育机器人
2010-03-18 16:23:1813 现在有了三维CAD软件SolidWorks的辅助,实现2D—3D转换,生成一般的三维数模是比较简单的事。对于从AutoCAD到三维软件过渡的设计者来说,SolidWorks的这个功能容易上手,可以帮
2010-09-09 15:53:460 产品介绍 ABB机器人产品线丰富,包括多关节机器人、协作机器人、喷涂机器人、SCARA机器人以及自主移动机器人(AMR)等多关节机器人:ABB的多关节机器人是六轴关节型
2024-09-30 17:56:07
GTS机器人位置精度激光跟踪测量仪是高精度、便携式的空间大尺寸坐标测量机。它集激光干涉测距技术、光电检测技术、精密机械技术、计算机及控制技术、现代数值计算理论于一体,主要用于百米大尺度空间三维坐标
2025-04-14 11:00:17
实现应用. 工作流程为:1) 收到充电指令后, 天轨搭载机器人移动到对应的充电桩, 移动过程中3D智能相机侦测移动前方是否有障碍物, 3D相机侦测充电枪
2025-07-07 08:47:04
内置的立体匹配算法,可直接输出高精度的深度图与点云数据。产品即插即用,无需外部电源,广泛适用于机器人导航、三维重建、体积测量、避障检测和互动娱乐等领域。既可满足室内
2026-01-06 15:12:01
针对J ava 3D 中虚拟机器人的树状结构特点,提出一种由机器人运动学导出的矩阵变换方法,使机器人左、右脚均可动态地成为树状结构的根结点. 根据该方法编写的虚拟机器人驱动程序,并
2011-06-27 18:04:2754 研究了OpenGL在工业机器人仿真中的应用及其实现方法,利用OpenGL卓越的渲染功能对场景和机器人进行绘制,形成真实感比较强的三雄仿真环境
2011-08-24 16:05:143721 三维CAD软件大都是通过鼠标点击来完成工作,此时,我们可以通过在三维CAD中设置快捷键的方式来减少单手负荷,使工作方便很多,自然也会提高工作效率。下面笔者就以中望3D这款三维
2012-02-16 16:09:365134 
用三点法实现机器人三维位置测量的研究!资料来源网络,如有侵权,敬请原谅!
2015-12-25 09:51:284 由美国斯坦福大学和加利福尼亚大学圣迭戈分校研究人员专为机器人研制的这种4D相机可以在一幅图像中采集到很多这类信息。 4D相机之所以能捕捉到比普通相机拍摄的2D图像更多的信息,是由于采用了光场照相技术
2017-09-20 08:41:112 定义及特点? 定义:机器人是一个在三维空间具有较多自由度的,并能实现诸多拟人动作和功能的机器:而工业机器人则是在工业生产上应用的机器人。 特点:可编程、拟人化、通用性、机电一体化 2、工业机器人有哪几个子系统组成?
2017-10-09 15:52:5610 感知与建模、机器人导航、双目物体跟踪与检测以及图像分割等领域。 三维立体视觉就是研究由2D图像恢复场景目标即3D信息的一门学科。目前用于三维恢复的方法主要有:结构光法、立体视觉法、光流法、亮度立体法、阴影法和纹
2017-10-20 11:51:305 在机器人手臂能够到达一个狭小的空间或拾取一个精致的物体之前,机器人需要精确地知道它的手在哪里。卡内基梅隆大学机器人研究所的研究人员已经证明,连接到机器人手上的相机可以快速创建一个三维环境模型,并在3D世界中找到手。
2017-12-30 14:33:442524 现代重工是业内第一家将机器人应用于船舶双曲面板成型作业的企业,每年可节约100亿韩元的成本。通过一年多的现场应用,结合物联网和自动化技术的自动成型船舶船首、船尾三维曲面外板的曲面板自动成型机器人系统顺利通过验证。
2018-04-19 06:58:003594 MELFAF系列的工业机器人搭载了2D,3D视觉传感器,使机器人能够通过图像监测轻松实现2维,3维的工件抓取。同时更配有力觉传感器,利用压力监测的原理能够轻松对应精密电子行业复杂的接插组装及连续作业,从而使机器人的功能更为精准及人性化。
2019-03-07 11:15:025209 在Robocup仿真比赛中,Agent的动作技能是仿真足球比赛的基础。本文详细分析了robocup 2D机器人足球仿真中射门技能存在的问题,论述了智能算法在机器人足球2D仿真球员射门技能中的应用,并提出了进一步的研究方案
2019-11-07 17:31:534 本文档的主要内容详细介绍的是六足机器人三维模型和STM32F103控制代码免费下载。
2020-06-15 18:00:0079 2D 面板上呈现了高炉的基本信息,热传感器信息,高炉检测信息;3D 可视化场景中呈现了高炉的真实几何结构,采用三维热力图呈现了高炉各个关键位置的温度信息,底部方位指针定位了高炉的朝向和传感器位置,两侧的高度标识展示了炉体关键位置高度信息。
2020-09-16 15:00:023598 的虚拟环境中进行机器人的教学和竞赛,可以达到实体机器人相近的教学效果。 三维仿真虚拟机器人应用了3D动画技术、电脑绘画技术、音响技术、通讯技术、单片机控制技术、有线无线网络技术、还可利用数字语音识别技术、数字电影技
2020-10-12 01:57:341035 图漾科技发布新款3D工业相机:FS820,小型化设计专为协作机器人Eye-in-Hand场景优化、助力手眼协作的大规模普及化应用。图漾科技全新发布新款3D工业相机FS820,在精度、RGB画质、产品
2020-11-09 11:38:513101 随着对精度和自动化的需求不断增加,3D机器视觉会变得越来越流行。业界认为,从2D到3D的过渡将成为继黑白到彩色、低分辨率到高分辨率以及静态图像到电影之后的第四次革命。 1、什么是3D相机? 3D即
2020-11-26 16:17:0314475 1.前言无论2D相机还是3D相机,提到相机不可避免地涉及到机器视觉。 机器视觉与计算机视觉并没有一个明显的定义去划分。但在实际应用中,应用于工业检测的时候更多地被称为机器视觉而非计算机视觉。这时候
2020-11-27 09:46:039319 提到3D建模,人们往往都会想到三维虚拟现实,3D虚拟现实其实是3D建模的另一个表现方式,而商迪3D的虚拟现实系统在应用上相当广泛,它不仅能用在工业上,而且他还能用在机器人上。它的数据和模型的建模
2021-03-06 10:13:591696 技术将照相机模型生成模拟一种数字化融合的交互式的三维动态视觉冲击仿真系统让客户沉浸到模型当中。与传统线下2D平面和视频广告营销方式对比,传统的展示方式不够生动、具体、形象、无法吸引客户的眼光等问题。 商迪3D运用专业的H5三维建模技术将
2021-03-26 11:55:081738 。RobotScan UE机器人全自动三维检测系统每项核心组件皆为国内自主研发,包括天远三维自主研发的高精度三维扫描仪、EINSENSE Q 3D数字化全尺寸检测软件以及大族机器人机械臂。该项系统方案可实现机器人
2021-04-06 14:53:132901 面向机器人的三维形状多层次局部匹配算法
2021-06-25 11:51:5518 电子发烧友网站提供《2D执行器在X/Y 2D空间中移动微型机器人.zip》资料免费下载
2022-07-21 10:02:322 新加坡南洋理工大学(NTU Singapore)的科学家们研制了一种机器人,可以独立组装椅子的各个零件。该机器人由一个HK Ensenso N35 3D相机和两个能抓取物体的机器臂组成。
2022-08-08 17:40:042104 一流的面阵扫描三维相机,极短时间即可采集完成高分辨率的三维点云图像。它使用独特的三维成像技术,可为有挑战性的 装配验证、在线测量和机器人引导应用解决有挑战性的难题。
2022-09-22 09:51:072218 这样的物理规范,具有很高的普适性,applicable 到所有维度空间。对二维 2D 拓扑绝缘体 (2D - TI) 和三维 3D 拓扑绝缘体 (3D - TI),其体 - 边对应性由图 1 所示的输运性质来表达最为简单直观。
2022-11-23 10:23:544338 确定移动机器人的状态是机器人导航系统中重要的组成部分。在本文中,我们提出了一种使用2D激光雷达在室内场景下估计机器人姿态的方法,并探讨了如何将新型的场景表示模型整合到标准蒙特卡罗定位(MCL)系统中。
2023-02-08 09:46:062182 借助三维机器视觉技术带来的准确性,自动化出厂尺寸检测可以做得更加精确,而拾放的工作也能得益于机器人技术的灵活性。拾放是一个至关重要的制造步骤,尤其是在供应链的各个环节都很紧张的情况下。软件工程师为拾
2023-05-16 09:52:36962 )可获取物体到相机的距离信息,加之2D平面的X,Y坐标,可计算出每个点的三维坐标,进行三维重建、目标定位、识别等应用。
2023-07-06 10:22:181930 
该方法具体通过六个步骤实现:图像的采集、系统相机标定、特征模板匹配、图像处理、三维仿真匹配以及三维重建。首先,通过两个相机于不同位置对待测物体进行图像信息感知获取。然后根据三角测量原理获得待测表面的三维信息,还原三维模型并进行重建,立体视觉法原理如图所示。
2023-09-01 16:12:574066 
编辑:镭拓激光三维机器人激光切割机是一种高科技的激光切割设备,它集自动化和光纤激光技术于一身,可以对三维钣金件及异形管件切割。该设备利用工业机器人的灵活和快速动作性能,根据用户切割加工工件尺寸的大小
2023-12-22 14:42:321820 
二维(2D)和三维(3D)双模视觉信息在自动驾驶、工业机器人、人机交互等前沿领域具有广泛的应用前景。
2024-01-05 10:35:281306 
编辑:镭拓激光三维多工位机器人的激光焊接机是一种先进的焊接设备,它结合了机器人技术、激光技术和多工位加工技术,科普一下优势和工作原理高效率和高产量:三维多工位机器人的激光焊接机可以同时对多个工位进行
2024-01-10 11:06:37881 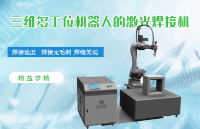
编辑:镭拓激光三维机器人激光切割机是一种集成了自动化机器人运动技术和高精度激光技术的先进切割设备。这种机器采用专业的高精度激光头,激光输出功率稳定,加工幅面大,可以对钣金、不锈钢等各种不同厚度
2024-03-15 15:18:221224 
 电子发烧友App
电子发烧友App






 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1


评论