由于深度学习在计算机视觉领域得到了非常好的效果,我们做机器人的自然也会尝试把 DL 用到机器人的物体识别中。
2022-10-14 15:14:53 2202
2202 场景化 · 可执行 · 指标清晰 · 调优可复用01|从“人巡”到“机巡”:电力站一周上线纪实周一,项目组进场。需求很直接:变电站夜间值守薄弱、盲区多、报警后回看取证慢;希望一台巡检机器人替代夜巡
2025-10-24 16:53:13
机器人技术不再是未来的幻想,它已经进入了我们的日常生活。但在这一领域,我们缺乏相应的法律法规。比如无人机,现在由美国联邦航空管理局( FAA)来管理,但很多人认为,这完全越权了;比如机器人
2015-01-13 16:39:57
随着社会的飞速发展和科技进步,机器人得到广泛应用,而工业机器人的应用更是走在了前面。工业机器人集机械、电子、计算机等先进技术于一体,自1962年第一台机器人在美国投入使用以来,已经广泛应用于制造行业
2020-05-12 07:20:37
为主,尽管机器人开始有搭载摄像头的趋势,但对视觉的理解仍然较低,往往需要有明显的特征点作为辅助,同时抗干扰能力弱,对光照条件,部分遮挡等常见题目不能找到可靠的方法。 机器人技术对图像理解的要求是迫切
2015-01-23 15:02:27
的知识,来判定这些零件是不是不良品。某种程度上来说,你可以认为机器视觉是计算机视觉的孩子,因为它使用计算机视觉和图像处理的技术和算法。但是,虽然它可以用来指导机器人的,他又不完全是机器人视觉。它更侧重于
2020-08-28 10:48:50
1.机器人视觉机器人研究的核心就是:导航定位、路径规划、避障、多传感器融合。定位技术有几种,不关心,只关心视觉的。视觉技术用到“眼睛”可以分为:单目,双目,多目、RGB-D,后三种可以使图像有深度
2019-06-08 08:30:00
labview 视觉机器人抓取工件 CCD相机的二维坐标系的建立?希望分享,谢谢
2017-08-18 20:53:37
列举部分学习过程中接触的部分书籍,部分有中文版,部分有更新版本。1.机器人基础书籍适合入门的书籍:机器人学机器人建模规划与控制机器人学、机器视觉与控制——MATLAB算法基础机器人学导论——分析控制
2019-05-22 06:53:10
ZNRGZ-4机器人搬运码垛工作站一、产品概述ZNRGZ-4机器人搬运码垛工作站以工业机器人与机器视觉为核心,将机械、气动、运动控制、PLC控制技术有机地进行整合,结构模块化,便于组合,实现
2021-07-01 08:20:18
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
视觉工业视觉是当前工业领域应用较广的 AI 技术,主要用于质量检测、尺寸测量、缺陷检查、识别和定位等,在汽车和电子 3C 制造业中应用广泛。而在工业视觉中,机器人视觉领域在技术和商用程度上均有较好
2019-08-16 04:00:00
视觉技术是近几十年来发展的一门新兴技术。机器视觉可以代替人类的视觉从事检验、目标跟踪、机器人导向等方面的工作,特别是在那些需要重复、迅速的从图象中获取精确信息的场合。
2019-09-04 08:00:27
功能:视觉定位玻璃的位置和角度,给平面4轴机器人抓取1.附件是我自己用视觉助手做的验证,很不稳定2.相机是1200W,视野范围是350*200,玻璃规格大小有很多,图片是其中一款3.定位精度可以+1mm,吸盘抓取后放进输送带有经验的老师麻烦试下,有偿帮助,谢
2021-10-05 17:15:58
安全,对一些特殊工种,如喷涂,铸造等通过劳动法强制采用工业机器人来代替,这样可以大大增加工业机器人的需求数量。视觉机器人我国的机器人产业化必须由市场来拉动,机器人作为高新技术,它的发展与社会的生产、经济状况
2016-09-08 10:34:05
为对几何体的识别和抓放过程ꎮ利用边缘提取、滤波去噪、圆心检测等算法采用LabVIEW视觉模块及其库函数进行了图像的预处理、特征提取以及中心点定位ꎮ研究结果表明基于LabVIEW的Tripod机器人系统能够准确识别平台几何体的颜色和形状可较为精确地定位几何体中心满足后续控制的要求
2019-06-01 06:00:00
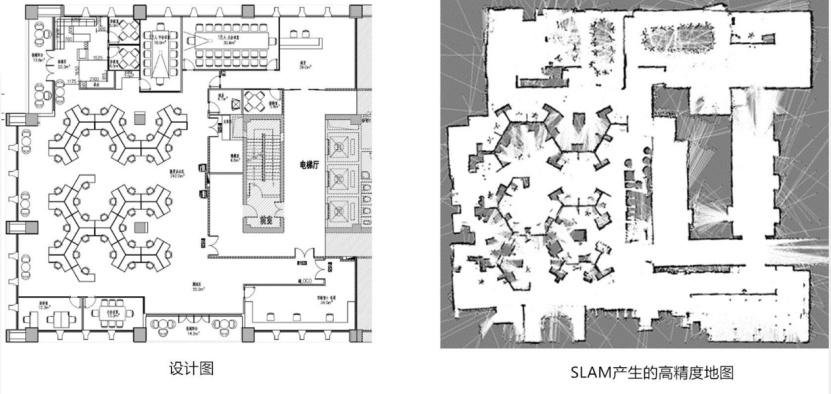
SLAM技术作为机器人自主移动的关键技术,让很多人都误解为:SLAM=机器人自主定位导航。 其实,SLAM≠机器人自主定位导航 ,不解决行动问题。 SLAM如其名一样,主要解决的是机器人的地图构建
2018-08-24 16:56:24
组合,实现对高速传输线上的不同物料进行快速的检测、组装。为了方便实训教学,系统进行了专门的设计,可以完成各类机器人单项训练和综合性项目训练,可完成各类机器人单项训练和综合性项目训练。可以进行六轴机器人示教、定位、抓取、装配等训练,包含六自由度工业机器人、智能视觉检测系统、PLC控...
2021-07-01 10:07:13
对不同物料进行快速的检测、组装。为了方便实训教学,系统进行了专门的设计,可以完成各类机器人单项训练和综合性项目训练,可完成各类机器人单项训练和综合性项目训练。可以进行六轴机器人示教、定位、抓取、装配等训练,ZN-980B机器人搬运码垛工作站包含六自由度工业机器人、智能视觉检测系统、PLC控制系统及一套供料、输送、装
2021-07-01 12:48:23
ZN-RAI02工业机器人与视觉实训平台是什么?ZN-RAI02工业机器人与视觉实训平台有哪些技术性能?ZN-RAI02工业机器人与视觉实训平台的结构是由哪些部分组成的?ZN-RAI02工业机器人与视觉实训平台有哪些配套软件?
2021-08-09 06:22:03
labview接收运动的巡检机器人采集回来的数据,距离比较长,感觉用蓝牙不太好,求助
2015-05-19 14:45:49
,对工业机器人的运动学、动力学、基本控制系统等传统内容的介绍比较简洁,对机器视觉、机器听觉和移动机器人的自主定位等新技术介绍较多,并以可重现的若干实例对相应技术和方法进行了验证,相关程序代码附在书中,重点
2016-06-01 13:12:46
项目名称:基于机器视觉的工业机器人抓取工作站试用计划:申请理由本人是嘉兴技师学院教师,浙江机器人有限公司技术顾问。在机器人领域有5年多的学习和开发经验,曾设参与多项工业机器人工作站的开发与调试
2019-09-18 14:18:14
项目名称:巡检机器人项目试用计划:申请理由:本人目前从事机器人嵌入式软件开发,公司现在有多款巡检机器人,但是目前大部分都是使用昂贵的工控机作为网络协议,运动路径规划,机器人算法,机器人日志系统
2017-08-24 13:38:58
申请理由:现在正在参与视觉机器人的项目,想了解更多的关于机器人的产品与知识。项目描述:水果采摘机器人:机器人寻找视野中的水果,并移动到相应的位置,由机械臂进行采摘水果并放到指定的位置。
2015-10-29 11:00:03
阅读心得体会:ROS2机器人视觉与地图构建技术
通过对本书第7章(ROS2视觉应用)和第8章(ROS2地图构建)的学习,我对机器人视觉感知和自主导航的核心技术有了更深入的理解。以下是我的心得体会
2025-05-03 19:41:47
`内容简介本书是关于机器人学和机器视觉的实用参考书, 第一部分“基础知识”(第2章和第3章)介绍机器人及其操作对象的位置和姿态描述,以及机器人路径和运动的表示方法;第二部分“移动机器人”(第4章至第
2018-01-17 17:38:11
`内容简介本书是关于机器人学和机器视觉的实用参考书, 第一部分“基础知识”(第2章和第3章)介绍机器人及其操作对象的位置和姿态描述,以及机器人路径和运动的表示方法;第二部分“移动机器人”(第4章至第
2018-04-08 18:19:42
项目名称:基于机器视觉的工业机器人抓取工作站试用计划:申请理由 本人是嘉兴技师学院教师,浙江机器人有限公司技术顾问。在机器人领域有5年多的学习和开发经验,曾设参与多项工业机器人工作站的开发与调试
2019-09-18 19:24:11
拿到一个题目,视觉采摘机器人。目前对视觉处理方面毫无头绪,由于条件有限,只做出概念实物。机器人只有达到识别该果蔬并采摘下来的效果。有没有大神提供一下思路。
2018-04-10 09:22:27
ZN-ZN605型 六轴机器人、自动上料模块、视觉检测模块、立体仓库模块、模拟焊接模块、码垛及轨迹示教模块、总控系统模块。 ZNH-IRW04型 工业机器人操作调整工技能鉴定平台要求参赛选手根据竞赛任务
2021-07-01 13:00:49
服务机器人定位导航方式目前机器人常用的定位导航方式有激光定位导航、视觉定位导航、红外线定位导航、超声波定位导航、GPS全球定位导航等。1.激光定位导航激光雷达+SLAM技术相结合的激光定位导航主要是通过对目标
2018-10-11 17:49:40
机器人的主要技术功能被称为“可编程”和“示教再现”。1962年美国推出的一些工业机器人的控制方式与数控机床大致相似,但外形主要由类似人的手和臂组成。后来,出现了具有视觉传感器的、能识别与定位的工业机器人
2015-01-19 10:58:38
工作站调试维护,操作编程等综合素质较强的技术人才。 三、就读工业机器人技术专业的优势1、工业机器人专业是顺应时代发展的先进科技技术,前景无限。类似10年前数控技术的应用,今天基本普及为先进制造业的主流
2015-09-02 14:03:18
和提高工作效率,就必须引入机器视觉技术来实现对目标的识别和定位。目前,装备了机器视觉系统的工业机器人已经被应用于许多领域。在许多自动化的生产线上,最后一道工序就是把产品摆放整齐,然后打包成型,而许多行业的产品体积
2021-04-29 09:42:45
第一步都是采用图案匹配技术定位相机视场内的兴趣物品或特征。那么深圳机器视觉引导定位是什么?相信不少人是有疑问的,今天四元数数控就跟大家解答一下!引导就是使用机器视觉报告元件的位置和方向,需要进行引导的原因
2021-11-24 11:32:58
、体积和质量小等要求,因此上位机选用PC104系统,其软件用C语言编程。采用USB摄像头,采集机器人前方的视觉信息,为机器人视觉导航,路径规划提供依据。外设麦克和扬声器,当机器人到达目标点后,进行导览解说
2019-07-04 08:30:00
本系统搭建了基于单目视觉的SCARA机器人硬件平台,并使用圆形供料盘混合投放多种颜色的保险片,利用CCD摄像机获取保险片的图像信息,从图像中提取其轮廓形状及坐标信息,并利用摄像机参数标定,通过坐标变换得到保险片在机器人坐标系的空间坐标,然后控制SCARA机器人夹爪对保险片工件进行精确定位和抓取。
2019-06-19 06:30:00
制造出像人一样具有智能的能替代人类劳动的机器人,一直是人类的梦想,人类获取的信息80%以上是通过视觉。因此,在智能机器人的研究中,具有视觉的机器人的研究也就成了第一位的。对机器人视觉伺服系统的研究是机器人领域中的重要内容之一,其研究成果可应用在机器人自动避障、轨迹跟踪和运动目标跟踪等问题中。
2019-09-27 08:07:35
——工业机器人的智能化程度要求也越来越高,采用深度学习技术为工业机器人赋能是目前各大厂商的统一认知。本文结合实际案例,简要说明一下智能机器人的实现流程。一、智能机器人概念 人工智能技术,其主要作用就是用
2018-05-31 09:36:03
,如下图所示。 地图与机器人实际角度存在偏差 发生上述情况后,要利用重定位功能修复相关偏差。 【重定位】 这里重定位有两种情况: 自动重定位: 在SLAM选项里面,“重定位”操作以后
2019-01-28 17:27:40
山东康道智能资讯:如何保障桁架机器人的安全,山东康道智能研发的桁架式机器人,其结构紧凑,外形美观,运行速度灵敏,好的定位,有效的故障报警系统装制,具有可调性,通用性,为客户创造、持久的生产效益,并且
2018-09-29 12:08:34
新一轮的科技和产业变革的加速演进,5G和人工智能与机器人技术深度融合,这让特种机器人的应用场景不断拓宽,在各行各业中发挥着的作用也愈加关键。编辑切换为居中01智能巡检机器人在城市快速发展的过程中
2023-04-12 15:49:23
,导航技术,计算机技术,人工智能等多个领域,因而对移动机器人的控制部分提出很高的要求,特别是视觉传感器的出现,要求控制系统不仅存储量大,而且处理速度快等。以往基于PLC和单片机控制的移动机器人就不能很好
2020-11-23 15:08:52
怎样去实现ROS机器人的定位导航呢?如何对ROS机器人的定位导航进行仿真?
2021-12-23 09:22:45
组成(台皮带线输送模组、视觉定位及检测模组、码垛模组、装配模组、打螺丝模组、取料模组、机器人TCP标定模组、PC模组等)。通过对该工业机器人视觉装配实训平台的6关节机器人和平面关节机器人、多功能夹具
2021-07-01 12:05:38
ZN-RAI02工业机器人与视觉实训平台一、概述1、ZN-RAI02工业机器人与视觉实训平台以工业机器人与机器视觉为核心,将机械、气动、运动控制、变频调速、PLC控制技术有机地进行整合,结构
2021-07-01 06:38:35
。可以进行六轴机器人示教、定位、抓取、装配等训练,包含六自由度工业机器人、智能视觉检测系统、PLC控制系统及
2021-07-01 11:48:31
的2D视觉系统已经可以定位大多数堆叠于箱柜内部隔板顶层的部件。 这种应用一般的方法就是使用一个安装在箱柜上的摄像机来定位部件。摄像机安装在足够的高度,因此机器人可以在摄像机底下移动并进入箱柜内部。在每
2018-10-26 16:31:33
`<span style="" >工业机器人的技术原理机器人是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而
2018-11-23 10:40:38
为重要的感知工具。国际上的工业机器人本体制造商包括库卡、ABB、发那科、安川等。国内包括新松机器人、广州数控、锐奇股份(300126,诊股)、埃斯顿、埃夫特等。机器视觉技术领域,国外企业如康耐视、基恩士等
2017-08-23 15:10:27
,而是更多地融入了机器视觉、机器听觉、机器触觉、移动机器人的自主定位等新技术和新方法;也不再局限于一些理论层次上的分析,而更多的是以实际应用为主,在实际工作中扮演生产者的角色,在生活中发挥生活助手
2015-02-03 10:51:09
的特征点也能够获取目标的位置等信息。此方法须保证该组特征点在不同坐标系下的位置关系一致, 而对于一般的双目视觉系统, 坐标的计算误差往往会破坏这种关系。 采用在机器人上安装车载摄像机这种局部视觉定位
2019-06-01 08:00:00
扫地机器人自动回充,有多种技术原理,有采用雷达定位的、采用蓝牙定位的、红外线定位的。在扫地机器人领域主要是利用这3种定位技术。一、采用超声波定位一种扫地机器人是采用超声波定位来寻找充电基座的,超声波
2021-09-14 06:02:26
在物流搬运行业,拳头机器人由于其独特的并联结构,常用于高速整列、装箱等场合。其中,拳头机器人的视觉线跟踪技术正得到广泛的应用,如下图所示:
2020-08-06 06:30:31
巡检安防和楼宇监控,在反恐应急、智能家居等诸多方面,发展速度和探索进度都在加快。与国际安防机器人的发展相比,我国起步较晚,技术专利、科技创新、发展水平等方面,仍需竭尽全力实现追赶。一方面,中国企业涌入
2022-04-19 14:19:14
关于ros智能机器人,就是一个写智能机器人代码的一个虚拟机,
2021-10-13 19:20:16
机器人视觉传感器详解一种新型的工业机器人已经走到行业的前沿, 他们的主要特点是能够安全地协助人类工作。在网上有很多人谈论它们,但你认真了解过它吗?
2020-08-14 07:24:17
一种新型的工业机器人已经走到行业的前沿, 他们的主要特点是能够安全地协助人类工作。在网上有很多人谈论它们,但你认真了解过它吗?在2008年,很多人爱它们只是处于好奇心。在2012年,机器人被视为
2020-08-17 06:00:49
,在生产过程中,完成产品的组装、抓取和放置,不仅可以大幅提高生产效率,而且还能提高准确度,随之提高产品的合格率,降低生产成本。因此,视觉引导的机器人应运而生。视觉引导的机器人,相当于为机器人装上了“眼睛
2016-02-03 10:20:33
; 4.安卓手机控制设计; 5.火灾、煤气泄漏检测及GSM报警系统;理论依据:1.传感器在物联网中的应用; 2.短距离无线信号定位; 3.向量空间理论与机器人运动学; 4.人工智能与机器视觉;技术
2015-12-02 19:08:42
有什么机器人技术的资料?单片机开发的.
2011-06-21 10:42:25
随着计算机科学和自动控制技术的发展,越来越多的不同种类的智能机器人出现在工厂、生活当中,机器人视觉系统作为智能机器人系统中一个重要的子系统,也越来越受到人们的重视。它涉及了图像处理、模式识别和视觉
2020-04-07 07:27:24
放料位的位置也会保持不变。 如图1所示,放置一片模板电芯到CCD下面,视觉抓边取顶边与左边及其交点。以交点做为模板的特征点,左边做为模板的方向边。 让机器人示教一个抓取电芯的点,如图1所示的这个示
2021-04-07 12:06:47
的合作。公司致力于各类移动机器人产品的研发与销售,如餐饮机器人,巡检机器人,安防机器人等各类移动机器人。公司致力于为工厂以及物流仓储行业提供无人化、智能化的设备,如各种不同应用场景的AGV,包括
2017-06-10 14:24:17
怎么设计一种室外移动机器人组合导航定位系统?如何实现室外移动机器人组合导航定位系统的硬件设计?如何实现室外移动机器人组合导航定位系统的软件设计?
2021-04-19 10:50:33
。就像人类一样,在机器人的众多感知传感器中,视觉系统提供了大部分机器人所需的外部相 界信息。因此视觉系统在机器人技术中具有重要的作用。单目视觉单目视觉,单目视觉系统只使用一个视觉传感器。单目视觉系统在
2018-12-13 21:23:57
基于DM642的机器人双目视觉系统设计
2021-04-02 07:20:41
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 15:57:13
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 16:25:29
夹具,车身可定制物料缓存架。技术优势经世智能复合机器人产品使用了自主研发的复合机器人一体化控制系统和复合机器人车身姿态动态补偿技术,有效保障抓取的精度和稳定性,抓
2025-08-13 09:47:30
核心技术,突破场景局限 科义履带式巡检机器人以 双导航系统为核心,搭配综合悬挂系统,轻松跨越复杂地形,实现灵活移动与≤30° 爬坡能力,7×24 小时全天候运行无忧。双光云台集成可见光
2025-10-16 10:29:44
科义轨道式巡检机器人:高精度智能巡检解决方案精准定位系统:毫米级路径控制技术科义轨道式巡检机器人搭载激光导航系统,实现±5毫米级定位精度,支持多机协同作业,形成无死角巡检网络。
2025-11-06 09:44:02
机器人视觉技术书籍
2017-08-01 10:30:29 18
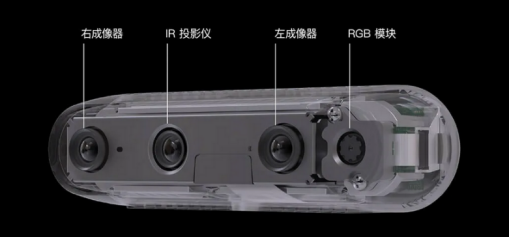
18 。那么,在现有SLAM技术中,机器人常用的定位导航技术有哪些呢? 视觉定位导航 视觉定位导航主要借助视觉传感器完成,机器人借助单目、双目摄像头、深度摄像机、视频信号数字化设备或基于DSP的快速信号处理器等其他外部设备获取
2017-09-19 16:08:3630 最近两天参观了华为的自动化工厂,了解到机器人抓取在工业中的应用以及未来的前景,备受鼓舞。作为一个搞机器人抓取(grasping)接近八年的老grasper,觉得还是可以写写机器人抓取的前世今生的。也
2017-09-20 09:21:313 就是我们标题中提到的,基于机器视觉的工业机器人定位技术。这一技术在国内最早被应用于焊接机器人对焊缝的跟踪,而维视图像的视觉采集设备及图像处理软件,成为行业内视觉引导的先驱和首选。 典型的机器人视觉
2017-09-29 10:15:3213 本文主要研究3D视觉技术在机器人抓取作业中的应用,总结了3D视觉技术在识别、定位物体时面临的挑战,给出了抓取作业机器人3D视觉系统的设计方法。
2019-07-25 08:43:109251 基于视觉的工业机器人定位抓取技术在现代化工业进程中起到极其重要的作用,本文在定位抓取的基础上研究了云端激光打标系统中与计算机视觉相关的机器人检测系统内容。
2020-09-23 11:59:103298 自主巡检机器人主要通过自主充电、路径规划、自主导航定位、图像识别分析、环境感知等高新科技技术实现巡检任务的设备,无需人工干预,为企业提供设备故障的判别和自动报警,帮助企业更好的自动化管理,那么自主
2020-09-24 15:11:453021 随着机器人核心关键技术不断的发展,经过很长一个阶段的技术攻关,巡检机器人已走在相关领域的前沿,并且可以实现设备安全管理、园区安全管理,因此,国辰机器人就将园区巡检机器人及管理分为5大步骤,供大家
2021-02-16 10:15:001712 随着机器人核心关键技术不断的发展,经过很长一个阶段的技术攻关,巡检机器人已走在相关领域的前沿,并且可以实现设备安全管理、园区安全管理,因此,国辰机器人就将园区巡检机器人及管理分为5大步骤,供大家参考。
2020-12-30 10:20:133939 等场景,挂轨巡检机器人备受追捧,国辰机器人小编与您一起看看它藏着哪些流量密码? 流量密码一:场景适应性 挂轨巡检机器人沿轨道运行,不依赖地面环境,在行驶过程中可实现自主爬坡,并自带可升降云台及高清摄像机,满
2021-11-23 16:55:552840 抓取综合方法是机器人抓取问题的核心,因为它涉及到在物体中寻找最佳抓取点的任务。这些是夹持器必须与物体接触的点,以确保外力的作用不会导致物体不稳定,并满足一组抓取任务的相关标准。
2022-05-07 15:38:143626 最近视觉抓件系统一直会出现抓取零件不到位的问题.下面我将分析一下问题出现的原应.
2023-03-24 16:42:071541 机器人视觉抓取的目的是使用一个机械手模型(包括二指或多指夹爪,吸盘等),以RGB或RGBD相机采集的场景图像为输入计算出一个最优的抓取位姿,使机械手在该位姿下可以稳定地抓取模型已知或未知的物体。
2023-03-30 10:19:291102 机器人研究的核心就是:导航定位、路径规划、避障、多传感器融合。定位技术有几种,不关心,只关心视觉的。
2023-04-20 09:57:332191 在Eye-to-Hand系统中,视觉成像单元安装在机器人本体外的固定位置,在机器人工作过程中不随机器人一起运动,当机器人或目标运动到机械臂可操作的范围时,机械臂在视觉感知信息的反馈控制下,向目标移动,对目标进行精准操控。
2023-06-06 14:44:592481 
行业应用也得到了广泛的应用,智能巡检机器人也被列为了核心的发展计划之中。人工巡检、直升机巡检和机器人巡检已经成为当下三大主要的智能巡检作业方式。5G工业路由器通讯技术、人
2023-06-01 09:41:451847 
焊接机器人的操作步骤有哪些?焊接机器人不仅提高了生产效率,降低了生产成本,而且还能有效地保障焊缝的质量和稳定性,代替人工在恶劣的环境中工作,工业机器人集成商无锡金红鹰带您了解操作步骤。
2023-07-18 16:31:162616 抓取综合方法是机器人抓取问题的核心,本文从抓取检测、视觉伺服和动态抓取等角度进行讨论,提出了多种抓取方法。各位对机器人识别抓取感兴趣的小伙伴,一定要来看一看!千万别错过~
2023-08-19 17:19:462865 
经过以上对移动抓取机器人系统详细的剖析,我们可以知道移动抓取机器人系统并不是简单的“堆料”,而是以移动底盘的智能路径规划、视觉识别、移动底盘与抓取系统、多传感器融合为核心的高度复杂的机器人系统。
2023-12-19 15:09:031460 
工业机器人视觉技术的应用非常广泛,涉及到许多不同的领域和场景。以下是一些主要的应用领域和相关技术: 物体识别与定位 物体识别与定位是工业机器人视觉技术的基础应用之一。通过使用摄像头和其他传感器
2024-07-09 09:38:112133 在工业4.0与智能制造的浪潮中,复合机器人凭借“视觉感知+机械臂执行”的协同能力,正成为高精度作业的核心装备。而衡量其性能的关键指标之一,便是复合机器人能满足多少毫米级的定位。从微米级芯片抓取到毫米级手术操作,这一技术正以颠覆性精度推动千行百业的智能化升级。
2025-04-15 15:44:09566
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论