传统的机器人控制技术大多是基于模型的控制方法,无法得到满意的轨迹跟踪效果,模糊控制和神经网络等人工智能的发展为解决机器人轨迹跟踪问题提供了新的思路。本文采用高斯函数作为模糊隶属函数,将模糊控制
2016-09-19 14:34:39 2229
2229 
一种新的机器人视觉伺服控制方法,该方法参照人的抓取动作,首先根据物体在图像中的位置信息,利用模糊逻辑将机器人的手爪移动到物体附近,然后再根据物体当前图像和参考图像之差,利用局部神经网络对手爪的位姿进行精确调整。整个过程无需机器人和摄像机的标定,能有效利用人的控制经验.
2016-09-19 15:34:212031 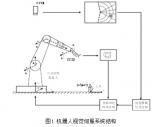
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理机器人的基本工作原理是示教
2021-09-13 08:40:55
神经网络算法怎么去控制温控系统,为什么不用pid控制
2023-10-27 06:10:14
针对传统比例积分(PI)控制在电机控制中控制效果不良的问题,设计了一种基于向后传播算法(BP)模糊神经网络的PI控制器。基于MATLAB/Simulink建立了纯电动汽车驱动系统的仿真模型,将驾驶员
2019-12-10 16:32:40
自动或半自动机器人常常需要嵌入式控制系统,从而能够结合高度智能化的确定性控制,并且可以方便地连接到不同的传感器和执行器上。NI提供了多种嵌入式硬件平台,以满足复杂系统的需求。从尖端的机器人研究项目直至高级行业应用,NI平台被证实是高效的机器人解决方案。
2019-11-06 07:50:49
请问:我在用labview做BP神经网络实现故障诊断,在NI官网找到了机器学习工具包(MLT),但是里面没有关于这部分VI的帮助文档,对于”BP神经网络分类“这个范例有很多不懂的地方,比如
2017-02-22 16:08:08
神经网络与遗传算法对协调控制器输出的各个控制量进行计算,设计基于此偏差信息控制的十字滑块和焊后焊缝跟踪机器人移动机构协调控制系统偏差,但协调控制是一个非常复杂的问题,控制器的设计直接决定了机器人的跟踪效果
2015-08-10 22:27:36
。双模式智能机器人的设计:模式一、无人导航,加入模糊神经网络的蔽障算法实现自动蔽障。二、遥控模式,基于无线遥控模块(预计使用蓝牙),完成遥控导航。4。硬件模块预计主要会涉及:蓝牙、超声波雷达、直流电机
2016-10-20 15:50:35
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人的规划与控制系统。这些基础模块在自主机器人系统中占据了
2025-01-04 19:22:08
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
ROVER C5 V0501 机器人控制系统采用国际流行的开放式软硬件平台,配以自主研发的避障控制卡、牵引运动卡及机器人内控专用编码器和安全接口;
2019-09-12 09:00:12
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-07-05 07:08:47
本文以6- PPPS并联机器人为控制对象,以NI公司的系列软硬件产品为基础,依托国家自然基金(No. 30770538)的支持,快速开发了此并联机器人的开放式数字控制系统。
2021-05-12 06:38:22
抽象人工智能 (AI) 的世界正在迅速发展,人工智能越来越多地支持以前无法实现或非常难以实现的应用程序。本系列文章解释了卷积神经网络 (CNN) 及其在 AI 系统中机器学习中的重要性。CNN 是从
2023-02-23 20:11:10
神经网络可以建立参数Kp,Ki,Kd自整定的PID控制器。基于BP神经网络的PID控制系统结构框图如下图所示:控制器由两部分组成:经典增量式PID控制器;BP神经网络...
2021-09-07 07:43:47
研究的前沿,它在一定程度上代表了一个国家的高科技发展水平。运动控制系统是机器人控制技术的核心,也是机器人研究领域的关键技术之一,在机器人控制中具有举足轻重的地位,因此,各研究机构都把对机器人运动控制系统的研究作为首要任务。
2020-08-19 06:57:09
带动货架运行至指定位置完成快件运输功能。2 系统硬件设计2.1 车体设计在本设计中搬运机器人采用K60单片机作为主控单元,车体采用亚克力板制作,车轮采用橡胶轮胎,电机采用大马力的减速电机,车体的前轮由
2018-04-20 10:53:09
带动货架运行至指定位置完成快件运输功能。2 系统硬件设计2.1 车体设计在本设计中搬运机器人采用K60单片机作为主控单元,车体采用亚克力板制作,车轮采用橡胶轮胎,电机采用大马力的减速电机,车体的前轮由
2018-04-20 10:53:09
传感器实现,包括光电传感器、压力传感器等。其中机器视觉是感知信息量最大的传感器,可感知位置、颜色、纹理、字符等信息。基于机器视觉的环境感知系统几乎是目前“智能机器人”的标配,机器视觉包括视觉传感器和智能
2018-05-31 09:36:03
树莓派和其他机器人的控制器有何不同?如何使用树莓派开发智能机器人控制系统?
2021-12-23 06:55:02
1 引言随着人口老龄化进程的加快,更多老年人,尤其是地震和疾病致残的残疾人,都需要照顾。基于此,这里提出一种基于ARM的嵌入式服务机器人控制系统设计。该服务机器人的控制系统是机器人的神经中枢,因而
2019-07-30 07:02:31
由于时变非线性和强耦合的控制系统还没有精确的数学模型,因而传统的依赖被控对象数学模型的控制策略及其控制系统的封闭式结构很难对其实施有效控制。神经网络控制能够很好地克服系统中模型参数的变化和非线性等
2019-08-12 06:25:35
移动机器人是一种能够感知外部环境,在有障碍物的环境中能够实现动态决策与规划,从而完成避障等多种功能的综合系统。机器人系统通常分为机构本体和控制系统两部分,控制系统的作用是根据用户的指令对机构本体进行
2020-03-06 07:07:07
随着人口老龄化进程的加快,更多老年人,尤其是地震和疾病致残的残疾人,都需要照顾。基于此,这里提出一种基于ARM的嵌入式服务机器人控制系统设计。该服务机器人的控制系统是机器人的神经中枢,因而其设计是机器人研究的核心。该控制系统通常以MCU、 DSP等为核心,采用上、下位机二级分布式结构。
2019-10-15 08:03:16
机器人不仅需要人工智能(AI)才能实现自主。他们还需要大量传感器,传感器融合以及边缘的实时推理。之前我们已经尝到了深度卷积神经网络的好处,如今来自激光雷达的更高数据处理的需求正在推动神经网络到新拓扑
2021-12-20 06:44:08
最近在看工业机器人的资料,想知道现在的一些市面上的工业机器人上用的控制控制系统都有哪些厂商呀?
2015-01-23 12:04:01
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-06-30 06:37:34
小女子做基于labview的蒸发过程中液位的控制,想使用神经网络pid控制,请问这个控制方法可以吗?有谁会神经网络pid控制么。。。叩谢
2016-09-23 13:43:16
什么是激光SLAM?激光SLAM技术在机器人运动控制系统中的应用是什么?
2021-07-30 06:37:25
的研究具有重要意义.模糊神经网络是人工神经网络和模糊系统相结合的新型网络结构,把它应用于语音识别系统,使系统不仅具有非线性、自适应性、鲁棒性和自学习等神经网络本来的优势,也具有模糊推理和模糊划分等模糊逻辑全文下载
2010-05-06 09:05:35
各位大神,请问有没有编过模糊PID控制程序或神经网络控制程序?
2015-01-12 10:50:48
控制器(运动控制)、伺服驱动器、IO模块和电源系统4个部分。 机器人控制系统 机器人控制器是机器人的核心部分,主要控制机器人在工作空间中的运动位置、姿态和轨迹,以及操作顺序等;机器人的每个关节都
2023-02-24 17:05:21
神经网络模糊系统及其在运动控制中的应用是一本关于人工神经网络、模糊逻辑系统,以及模糊神经网络研究成果的专著。作者在简要介绍神经网络理论与模糊理论的基础上,对人
2009-01-13 15:18:34 0
0 摘要本文采用模糊- 神经网络解耦控制技术实现了对三容系统的解耦及液位控制。Matlab 仿真结果表明该控制系统动态响应快,鲁棒性好,具有优异的整体性能。关键词模糊神经网
2009-01-17 21:52:4421 基于神经网络的信息收集机器人导航界面
Neural Network Based Navigation Interface for Robot of Information Collection
2009-03-16 15:18:077 将Chebyshev神经网络模型作为混沌控制系统辨识器,任选系统初值和非线性、非周期性控制律,通过Chebyshev混沌神经网络产生混沌序列,求出该序列的排序置换及逆置换,对明文置换
2009-04-20 09:43:299 模糊神经网络提供了从人工神经网络中模糊规则的抽取。本文研究模糊神经网络的自适应学习、规则插入和抽取及神经-模糊推理的FuNN 模型。把遗传算法作为系统模糊规则选择的自
2009-06-06 13:45:4218 水位控制是工业锅炉控制系统中一个重要的环节,其控制质量的优劣直接影响到锅炉的安全和经济效益。本文将一种基于模糊RBF 神经网络的PID 控制器应用与工业锅炉水位的控制
2009-06-09 09:13:0319 应用仿人智能鲁棒性高、能对付难控对象的控制特点,结合模糊RBF 神经网络控制技术,提出仿人模糊神经网络控制方法,对PID 控制器参数进行优化调节。该方法采用仿人智能的
2009-06-09 10:47:3617 利用一种改进的模糊神经网络实现双吊点闸门的同步控制。这种方法把模糊控制和神经网络相结合进行控制系统的建模。与传统的PID 控制方法相比,该控制方法具有自学习和自适应
2009-06-09 11:32:5516 为了对模型复杂的轮式地面机器人进行转向控制,应用了模糊遗传PID控制方法。先用模糊神经网络建立车体模型,再用遗传PID进行参数寻优,最后用优化参数控制机器人转向。该方法能
2009-06-10 13:20:5026 介绍了基于模糊神经网络智能火灾报警控制系统,在系统中应用了模糊控制理论既提高了系统的精度又最大限度的减少了系统的误报率,解决了火灾报警系统中长期存在的问题。结
2009-06-10 14:09:5316 介绍一种基于RBF 的模糊神经网络设计与仿真分析的实现方法。该方法利用MATLAB 中的神经网络工具箱图形用户界面GUI 结合模糊控制规则表给定的输入/输出样本数据设计、构建RBF 模糊
2009-06-10 14:22:4928 序批式活性污泥法(SBR)污水处理过程是一个具有随机性、难以获得满意的控制效果;提出了一个具有五层的模糊神经网络控制系统时变性和祸合性的复杂过程,传统的时间程序控制或
2009-07-10 15:58:3711 本文针对基于直接转矩控制的异步电动机运行时存在较大的电流及转矩脉动问题,提出了利用神经网络建立直接转矩控制系统的定子磁链观测器,并引入模糊控制算法,用较 少的
2009-07-15 11:08:458 本文提出了用于SCARA 机器人运动控制的自组织模糊聚类神经网络控制器。该控制器基于模糊聚类方法在学习模糊规则之前先优化训练数据,去除冗余数据并解决数据冲突问题,不但
2009-08-04 15:33:1823 针对现有隧道照明存在的大量电能浪费,提出一种基于模糊神经网络的隧道照明控制系统实现节能。将车速、车流量和洞外亮度做为系统的输入,照明回路调光数值做为系统的输
2009-08-13 15:40:0814 基于混合学习算法的模糊神经网络控制系统 刘美俊厦门理工学院电子与电气工程系(厦门 361024)摘要:针对复杂非线性系统在控制过程中的不确定性及参数的时变性,
2009-11-01 09:46:1315 本文提出一种基于遗传算法优化的模糊控制系统并将之用于五自由度关节型机器人轨迹跟踪控制,该系统将五关节的位置误差和误差变化率作为模糊控制器的输入,输出为五关节
2009-12-18 11:51:2732 针对中长期负荷预测,本文将模糊理论与神经网络相结合,提出了基于高木-关野自适应神经网络模糊推理系统的中长期负荷预测模型。该模型采取神经网络技术对模糊信息进行处理
2009-12-18 16:48:046 应用仿人智能鲁棒性高、能对付难控对象的控制特点,结合模糊RBF 神经网络控制技术,提出仿人模糊神经网络控制方法,对PID 控制器参数进行优化调节。该方法采用仿人智能的
2009-12-19 11:50:0312 机器人动力学控制由于其数学模型的不确定性,一直是困扰该领域的难题之一。本文研究了通过神经网络逆系统方法实现机器人的解耦,然后在外环施加控制的新方法。文中对该
2010-01-11 16:54:2311 介绍了MATLAB软件的仿真技术在神经网络一模糊控制电冰箱的仿真研究中的应用,并用汇编语言编程实现了制冷目标温度和制冷过程的模糊控制,以及神经网络在预冷和化霜等智能控
2010-01-12 16:57:4234 本文提出了一种模糊神经网络控制器,该控制器用于工业机器人关节驱动的位置控制,克服了传统PID很难达到对非线性以及不确定因素的控制效果和简单模糊控制不能完全消除稳态
2010-03-03 15:14:5783 模糊神经网络在GPS高程转换中的应用
摘要: 介绍了模糊神经网络基本原理和GPS 高程转换方法, 采用模糊神经网络算法, 实现了GPS 高程转换. 在用模糊神经网络进
2010-04-26 11:27:2812 针对现有隧道照明存在的大量电能浪费,提出一种基于模糊神经网络的隧道照明控制系统实现节能。将车速、车流量和洞外亮度做为系统的输入,照明回路调光数值做为系统的输出。系
2010-07-13 16:37:5012 详细介绍了CMAC神经网络结构" 中间层作用函数地址的计算方法" 输出层权值的学习算法# 并利用CMAC神经网络对水下机器人深度模糊控制器进行了学习$ 仿真结果表明% 训练得到的
2010-07-22 15:49:5925 神经网络控制系统通常会面临多种选择,如样本的训练方式、神经网络的算法等,不好的选择会降低预测率。BP(Back Propagation)神经网络库存控制系统融合多种库存控制技术,利用BP算法对
2010-11-13 17:24:0731 摘要:在机器人手眼系统位置控制中,用CMAC神经网络建立了机器人非线性视觉映射关系模型,实现了图像坐标到机器人坐标的变换。该模型采用了一种新的多维CMAC
2006-03-24 12:46:401611 
提出了利用模糊神经网络控制器(FNN) 实现对超声马达位置进行控制的方法,并提出适应法则进行在线训练,以减小由于参数的不确定性和外部干扰对超声马达所产生的影响,提供了FNN 控制器
2011-06-18 16:07:5634 运动控制 是人工神经网络应用于机器人控制的重要内容。本文就人工神经网络用于机器人运动学正解问题进行研究, 通过建立机器人运动学神经网络模型, 给出了相应的BP 算法, 并对2R、
2011-06-28 11:04:3238 提出一种用于异步电机位置控制的模糊神经网络(fuzzy neural network ,FNN) 控制器。其控制系统采用Sugeno 型FNN 和比例积分(proportional integrate , PI) 控制进行构建。在进行试验测试之前,利用实验
2011-09-26 14:35:5032 基于神经网络的自主吸尘机器人混合视觉研究!资料来源网络,如有侵权,敬请见谅
2015-11-20 15:34:540 基于粗神经网络的仿人智能机器人的语音融合算法研究电子论文!资料来源网络,如有侵权,敬请见谅
2015-11-30 11:34:244 基于人工神经网络实现智能机器人的避障轨迹控制!资料来源网络,如有侵权,敬请见谅
2015-11-30 11:33:3048 基于神经网络信息融合的智能机器人!资料来源网络,如有侵权,敬请见
2015-11-30 11:33:204 神经网络在智能机器人导航系统中的应用研究!资料来源网络,如有侵权,敬请原谅!
2015-12-25 09:35:598 基于模糊神经网络的RoboCup足球机器人局部路径规划方法研究
2016-01-04 14:59:050 基于DSP的清洗机器人模糊控制系统研究2008。
2016-04-05 10:30:1214 模糊系统、模糊神经网络及应用程序设计-上科。
2016-04-11 17:14:030 模糊控制与神经网络-北航,有需要的下来看看。
2016-04-11 17:33:160 本文将模糊控制与神经网络相结合,设计一种基于模糊神经网络的机器人位置控制系统,并将其运用到机器人轨迹跟踪控制系统中,本系统中,立体定位系统作为主要数据输入通道,用于精确获取目标位置与机器人之间精确的相对位置。随后将这些现场实时空间信息融入先前建立的空间模型。
2016-09-19 10:53:1832 传统的机器人控制技术大多是基于模型的控制方法,无法得到满意的轨迹跟踪效果,模糊控制和神经网络等人工智能的发展为解决机器人轨迹跟踪问题提供了新的思路。普通模糊控制的控制规则大部分是人们的经验总结.不
2016-09-22 11:15:3423 提出一种新的机器人视觉伺服控制方法,该方法参照人的抓取动作,首先根据物体在图像中的位置信息,利用模糊逻辑将机器人的手爪移动到物体附近,然后再根据物体当前图像和参考图像之差,利用局部神经网络对手爪的位姿进行精确调整。整个过程无需机器人和摄像机的标定,能有效利用人的控制经验。
2016-09-22 11:15:3416 移动机器人编队的神经网络滑模控制_朱玲
2017-01-07 17:16:230 提出含慢、快变控制项的组合控制器。对于慢变子系统,设计一种无需模型的模糊径向基函数( RBF)神经网络(FRBFNN)自适应跟踪控制方案,利用神经网络观测器估计关节角速度信息,并对系统的未知非线性函数进行逼近;对于快变子系统,采用
2017-12-11 14:11:310 模糊神经网络就是模糊理论同神经网络相结合的产物,它汇集了神经网络与模糊理论的优点,集学习、联想、识别、信息处理于一体。
2017-12-29 14:40:4050582 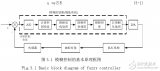
模糊神经网络是将人工神经网络与模糊逻辑系统相结合的一种具有强大的自学习和自整定功能的网络,是智能控制理论研究领域中一个十分活跃的分支,因此模糊神经网络控制的研究具有重要的意义。本文旨在分析模糊神经网络的优缺点及其用途。
2017-12-29 15:35:3328275 神经网络控制系统又成为模糊控制系统,是个新兴的控制方法,就象我们说小明学习很好,但是怎么个好法就是个很模糊的概念。模糊控制不同与经典控制理论的关键在于他有一套属于他自己的模糊算法,这个对数学的要求还是挺高的,模糊控制也成做为智能控制系统。
2018-01-02 14:47:299053 
本文主要介绍了自适应模糊神经网络的交通灯控制系统的设计。针对我国城市交通的现状,机动车辆数量越来越多,而传统的交通信号灯控制模式采用的是定时控制,本文将模糊控制技术引入交通信号控制,实现交通灯的自适应控制,通过大量的模糊数据输入,对神经网络进行训练,以达到全局优化的调度。
2018-01-09 13:49:043698 
生物的诸多技能是在生物个体的生长发育过程中逐渐形成和发展起来的,能否赋予机器人这样一种特性呢?为此,本文基于BP神经网络为机器人建立起一种类似生物的感觉运动系统,使机器人与外界环境之间交互作用,产生
2018-01-09 16:46:481 模糊逻辑控制系统可用来代替经典控制系统或与经典控制系统一起来控制机器人。通过应用模糊逻辑,机器人可以变得更独特、更具有智能和更加有用。本文根据模糊控制理论为移动机器人的运动控制设计一个模糊逻辑系统。以使移动机器人能根据地形坡度和地形类别来自主的调节自身的运动速度,从而完成机器人运动的自动控制。
2018-09-26 14:17:003430 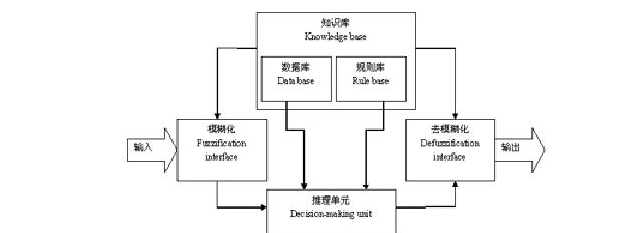
、强耦合、时变的复杂大系统,它要受到多变的外部环境、受控对象的不确定性、作物形态、尺寸不断变化的影响.针对模糊控制和神经网络控制的优缺点,本文将模糊理论的知识表达与神经网络的自学习能力有机地结合起来,采用快速的学习算法,提出了一种模糊神经网络控制方案。
2018-12-28 08:08:006806 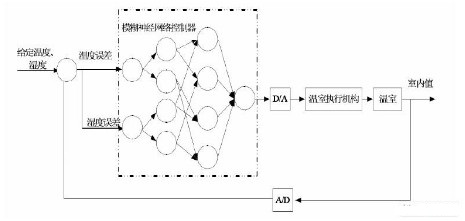
机器人的控制系统,就相当于人体的大脑,是机器人的核心组成部分。关于机器人的控制系统有哪些分类呢?机器人控制系统按其控制方式可分集中控制系统、主从控制系统及分散控制系统,下面为大家详细讲讲这些系统。
2019-11-04 08:45:3328261 神经网络控制,即基于神经网络控制或简称神经控制,是指在控制系统中采用神经网络这一工具对难以精确描述的复杂的非线性对象进行建模,或充当控制器,或优化计算,或进行推理,或故障诊断等,亦即同时兼有上述某些
2021-05-27 15:02:1113 基于模糊神经网络的微型涡喷发动机控制系统
2021-06-23 14:46:1019 研究团队设计了以宽度神经网络为主体的微型机器人基本运动控制器;基于李雅普诺夫稳定理论,推导了保障机器人运动稳定的控制器网络参数约束,简化了不同运动基元的控制器参数训练学习过程。
2023-05-30 10:21:45657 
电机控制系统作为现代工业自动化的核心组成部分,其性能直接影响到整个生产线的效率和稳定性。随着人工智能技术的快速发展,神经网络在电机控制系统中的应用越来越广泛。神经网络优化策略通过模拟人脑神经元的连接
2024-06-25 11:46:481817 ,虽然在某些应用场景下取得了较好的效果,但在面对复杂、不确定和动态变化的环境时,其性能往往受到限制。神经网络作为一种模拟人脑神经元网络的计算模型,具有强大的非线性映射能力和自适应学习能力,被广泛应用于机器人控制领域
2024-07-09 09:40:011648 机器人神经网络系统是一种模拟人类大脑神经网络的计算模型,具有高度的复杂性和灵活性。在本文中,我们将详细介绍机器人神经网络系统的特点,包括其结构、功能、优势和应用等方面。 一、引言 神经网络是一种受人
2024-07-09 09:45:471409 神经网络控制是一种利用人工神经网络对复杂系统进行建模和控制的方法。它在许多领域得到了广泛的应用,如工业自动化、机器人技术、航空航天、生物医学工程等。 一、引言 1.1 神经网络的基本概念 神经网络
2024-07-09 09:47:231550
 电子发烧友App
电子发烧友App














 工商网监
工商网监
评论