据AFR报道,谷歌本周公布了机器人研究细节,详细介绍其软件如何支持机器人互相学习。为了证明其技术,谷歌科学家展示了视频,显示机器人手臂在实验室中旋转的场景。
2016-10-09 14:05:40 941
941 2016年德国机器人及自动化技术贸易博览会 AUTOMATICA展览时间:2016年6月21日-24日展览地点:德国 慕尼黑国际展览中心主办机构:MESSE MUENCHEN GMBH(慕尼黑展览
2015-10-15 16:32:07
驱动器是由空气、燃料、压力或电力驱动的。图4: 末端执行器的表征图像终端执行器末端执行器是连接到机器人手臂上的“手”。它通常不同于人类的手——它可以是一个工具,比如一个夹钳,一个真空泵,镊子,手术刀
2022-03-31 10:31:31
数一般等于关节数目。机器人常用的自由度数一般不超过5~6个。 2、关节(Joint) 即运动副,允许机器人手臂各零件之间发生相对运动的机构。 3、工作空间 机器人手臂或手部安装点所能达到的所有
2017-08-15 14:00:52
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
,黑龙江省哈尔滨市机器人餐厅,机器人为客人传送菜肴。 2013年1月12日,黑龙江省哈尔滨市机器人餐厅,餐厅的工作人员将菜肴放在传送的机器人手中的餐盘内。 2013年1月12日,黑龙江省哈尔滨市机器人餐厅,烹饪的机器人为客人煮水饺。 2013年1月12日,黑龙江省哈尔滨市机器人餐厅
2014-07-26 09:11:04
设计的医疗康复机器人手臂控制系统,具有杰出的功耗控制和电机控制的高级定时器,能产生3对可配置并互补输出的PWM信号。通过在Simulink上建立双闭环PID算法模型,得到合适的PID参数来改变PWM波
2018-08-22 09:31:22
=ASIX.elecfans&utm_medium=news&utm_campaign=ASIX #AxRobot #AX58200 #EtherCAT #亚信 #机器手臂 #协作型机器人
2022-03-08 10:07:30
得到了广泛的应用,在我国有大量的需求,工业机器人系统包括:机器人示教器、控制器、机器人本体三部分组成。本课题所研究的是:基于可裁剪的WinCE6.0嵌入式操作系统的一种基于WinCE的工业机器人示教器
2015-07-23 22:14:55
概要:德国制造业之所以称霸全球,其背后是德国拥有极高的机器人自动化应用水平。随着德国工业迈向以智能生产为代表的“工业4.0”时代,德国企业对工业机器人的需求在继续增加。2010年至2014年,德国
2016-01-12 13:59:25
` 山东昊威机器人有限公司的书法机器人在展会上可谓是吸睛神器,小伙伴们纷纷前来围观,这不,国际友人都不禁为我们昊威书法机器人手动点赞啦!!!厉害啦我的机器人。`
2017-08-11 11:48:54
`这个视频介绍亚信电子AX58200 AxRobot EtherCAT七轴助力控制机器手臂解决方案,此方案可适用于各种协作型机器人相关产品应用。AxRobot机器手臂解决方案,利用亚信AX58200
2021-07-23 14:16:11
控制机器手臂软件控制功能的评估与相关产品开发设计。此方案可适用于各种智能生产自动化协作型机器人相关产品应用。 AxRobot机器手臂解决方案,利用亚信AX58200 EtherCAT从站马达驱动关节
2021-06-23 17:10:33
申请了专利。该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现。这就是所谓的示教再现机器人。现有的机器人差不多都采用这种控制方式。1959年第一台工业
2015-01-19 10:58:38
紧凑型工业机器人手臂。 一个典型的例子是KUKARobotics AGILUS系列,它具有三个版本。 前面提到的AGILUS KR 3 R540是最小的。它的工作面积只有2平方英尺,可处理的最大载荷为3
2020-09-04 17:31:26
我今年大一计算机专业 想做那种清理垃圾机器人带机械手臂的。。正在放寒假想学点东西准备一下但网上说的太笼统 而且网络普遍都一样的所以想请教一下 各位高机器人的我应该从何学起 我们就算是一个队伍吧一共8
2016-01-19 13:44:49
,运动学部分从坐标变换人手,介绍了正向运动学方程的建立、逆向运动学的求解以及机器人的微分运动等内容。控制结构篇着重介绍机器人的传感技术、位置控制和力控制。针对机器人控制领域的研究动态和主要研究方向,先进控制篇介绍了传感信息融合、视觉控制、协调控制、移动机器人技术、智能控制方法等。
2017-09-19 15:30:57
最近在家做机器人累啊,头大了,一天做好了机器手臂用亚克力板切割打磨做,幸福中带着苦涩,诸位有谁可以帮帮我吗
2013-02-06 21:57:39
在前边执行了机器人关节速度(位置)实例,也就是前边说的进入gazebo仿真以后,让机器人手臂动起来,摆头等动作,还可以通过rviz来打开嵌入式视觉。在进入了gazebo以后,在进行实例演示的时候
2021-12-20 06:17:05
个“蛇头”(内安装有摄像头和一些手术器械)。其“蛇身”则由若干节可自由弯曲的部件构成,总长为300mm,“蛇头”、“蛇身”的直径为12mm。据研制者介绍,该蛇形机器人适合做各种血管手术,尤其是复杂
2011-03-01 10:27:46
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息处理
2019-09-20 06:16:58
工业生产中,传统的工业机器人在生产适用性上已经不能满足日益增长的多任务需求,多轴机器人顺势发展,趋势明显。多轴机器人是能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系
2020-07-29 06:57:04
`随着工业转型升级需求释放、生产力成本上升等问题的凸显,再加上科技进步后的工业机器人性价比临近拐点,接受度渐增,工业机器人在不少领域已隐隐形成替代人工的趋势,而在工程机械行业这一趋势或许同样适用
2017-04-25 16:34:23
手术机器人系统的工作原理是什么?如何去实现一种基于传感器的机器人手术系统设计?
2021-09-28 08:46:20
(electronica)的FRANKA演示TI在德国慕尼黑电子展上展示了FRANKA EMIKA工业机器人手臂,展示了未来机器人将会承担由商业人士执行的更简单的任务,但这处于一个工业环境中。此处,您可
2019-03-06 06:45:09
工业机器人一般由主构架(手臂)、手腕、驱动系统、测量系统、控制器及传感器等组成。 1图是工业机器人的典型结构。机器人手臂具有3个自由度(运动坐标轴),机器人作业空间由手臂运动范围决定。手腕是机器人
2015-01-19 10:36:12
的全部动作,并将其全部信息送入控制器的存储器中,它实质上是一个专用的智能终端。(2)机器人手臂运动学机器人的机械臂是由数个刚性杆体由旋转或移动的关节串连而成,是一个开环关节链,开链的一端固接在基座上
2017-12-15 10:25:19
超声波电机一般安装在机器人手指关节处,机器人的关节驱动离不开伺服系统,机器人关节越多,对柔性及精准度就越高,所需的超声电机数量就越多。机器人对关节驱动电机的要求非常严格,因为超声波电机具有以下优势
2020-11-24 11:30:02
很大优势,它价格便宜,携带方便且在人类日常生活中已经普及.为了更好的服务人类,代替人类做繁琐的家务,基于Android平台的服务机器人的课题已成为当前研究的热点.基于上述背景,本文的研究内容是基于Android平台的双手臂...
2021-08-30 08:01:41
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息处理
2019-08-21 07:51:24
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息处理
2019-08-30 08:23:42
近年,仿人机器人的研发取得了重大进展。Rollin’ Justin 是由德国航空航天中心 (DLR)研制的一款机器人,能够完成复杂的双手动作,由于采用了移动平台,可以在房间中行动自如。它是一种服务
2015-01-21 17:11:24
在机器人的设计中,机器人的灵巧程度很重要。而人最灵巧的莫过于手指,而手指的灵巧性取决于手指的机械结构和电机驱动设计。这里简要的介绍了机器人手指的电气系统,详细的描述了机器人手指关节的电机驱动设计。
2016-01-14 10:34:55
,体积小同样是机器人上传感器的要求,对于安装在机器人手臂等运动部件上的传感器,重量一定要轻,否则会加大运动部件的损坏,影响机器人的运动性能。对于工作空间受到某种限制的机器人,对体积和安装方向的要求也是
2015-01-20 14:56:46
吸尘机器人作为服务机器人领域的一个新产品,结合了机器人和吸尘器技术,能在无人看守情况下轻松地完成室内环境的吸尘等清洁工作,越来越受到人们的欢迎。
2020-03-18 06:18:37
它的腿抬起来驾驶。 救援机器人的上半身有两个成人大小的拟人手臂和七个可玩性。它也有四个独立可控的手指,每个手指有两个小手指。它的上半身可以扭曲和伸展,以扩大和操纵室内空间。头部基本由传感器组成,包括
2020-11-30 15:10:15
目的:模仿人手动作测试手机屏幕,比如点击、滑动有没有朋友熟悉能完成此功能的成品机器人,不想自己动手搭建三轴滑台。。。
2016-10-08 14:24:39
八年前,研究人员推出了一种称为GelSight的新型,它使用与物体的物理接触来提供其表面的非常详细的三维地图。现在,通过将GelSight传感器安装在机器人手臂的夹具上,两个团队给予机器人更高
2018-11-08 15:58:29
`机器人手指一直以来都是国际公认的高难度科技项目,随着科技水平的不断进步和新兴的交叉学科不断涌现,传统的电磁电机机器人手指由于灵活性差、感知能力低下、力的控制精度不高等,已无法满足应用的迫切需要
2020-09-28 14:08:22
通过视觉传感器获取互动表演者的手臂姿态,挥动双手臂模仿表演者的动作,实现对机器人的仿生模拟控制。邯郸学舞机器人由一个视觉传感器、两个三自由度手臂、机器人身体和视觉处理控制器等组成;该机器人通过视觉传感器获取互动表演者的手臂姿态,挥动双手臂模仿表演者的动作,实现对机器人的仿生模拟控制。
2016-03-28 11:42:25
视频展示一个3D打印的机器人手用安森美半导体电机驱动器方案套件的LV8548MC控制。它可以做人类的手势,例如拿起球或指向某处。
2018-08-27 14:08:36
提出一种机器人手指尖六维力/ 力矩传感器,并对其弹性体结构进行详细论述;分析应变量与测量量的对应关系;采用现代设计手段对弹性体进行模态分析。并介绍了传感器放大处理
2009-07-08 12:57:25 36
36 泰科关节机器人具备哪些优势? 一、编程简单可以让无编程经验的操作人员能快速设置和操作我们的直观、3D 可视化协作式机器人。只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏
2023-04-19 15:13:28
为了满足空间机器人对不同手爪的更换要求,研制出手爪的自动更换装置。该装置基于多种传感器,对机械手臂末端的位置、姿态以及对接时的工作状态进行实时检测.
2011-09-15 14:42:4677 电子发烧友网核心提示:查尔姆斯理工大学的研究人员已经开发出世界第一个使用意念控制的植入式的机器人手臂。“骨整合”的技术是意念控制假肢的关键。患者脑电波意念脑电波脉
2012-11-30 11:37:334262 高级机器人手册初学者必备高级机器人手册高级机器人手册
2015-12-10 16:42:4528 LS系列机器人手册 对于机械手可以熟练掌握
2016-04-29 14:43:591 有时机器人手需要非常强壮,能够非常紧紧地抓住物体,而有的机器人手需要非常精细,以防止它们对人类造成伤害或损坏他们可能持有的脆弱物品。
2016-12-13 09:26:12525 仿人机器人混联灵巧手臂设计及运动学逆解研究_秦利
2017-01-08 11:20:200 工业机器人手臂快速碰撞检测算法
2017-02-07 18:09:2023 ,名为Project Aslan,它是一个3D打印的机器人手臂,可以将文本翻译成手语手势,但是团队的最终目标是建立一个表现力强大的双臂机器人,以充分表达复杂性语言。 Project Aslan旨在将文字或口语翻译成手语。在目前的形式中,Project As
2017-09-19 19:00:015 机器人学是一门边缘学科,它涉及电子精密机械、空间机构学、操纵动力学、人机工程学等的一门系统工程。本人在已有的机器人手臂的机械结构和机电设计的基础上,基于Motorola 公司的DSP56805
2017-10-17 16:15:2422 气动及喷涂元件内藏于机器人手臂,由机器人控制器直接控制,可降低投资成本,提高涂装质量。
2017-10-17 17:32:263 中国机器人工业得到了爆发式的增长,在主要应用领域,目前还是以以日本、南韩和德国为主,也是机器人市场的主要主导者。机器手臂的应用更是在其中扮演者重要的角色。调研机构预估到2021年,全球工业机器人的需求将增长82%。
2017-12-15 16:01:0428084 在机器人手臂能够到达一个狭小的空间或拾取一个精致的物体之前,机器人需要精确地知道它的手在哪里。卡内基梅隆大学机器人研究所的研究人员已经证明,连接到机器人手上的相机可以快速创建一个三维环境模型,并在3D世界中找到手。
2017-12-30 14:33:441820 一般机器人手臂有3个自由度,即手臂的伸缩、左右回转和升降 (或俯仰)运动。手臂回转和升降运动是通过机座的立柱实现的,立柱的横向移动即为手臂的横移。
2018-04-18 09:48:5715958 
蓝牙控制并且指导机器人手臂动作
2018-07-09 03:22:003292 近年来,随着MEMS及相关技术的发展,微机器人领域已越来越来受人关注。但由于零件的尺寸很小,微机器人组件的装配需要很高的精确度,一般的装配方法无法满足要求。本文介绍了一个可进行微零件装配工作的机器人手臂控制系统的控制方法。
2020-04-23 07:55:002650 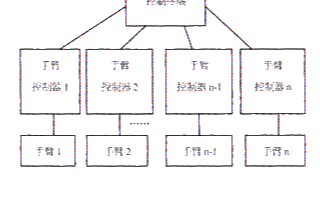
据外媒消息,亚马逊已经获得了2015年首次申请的专利,该专利描述的是用机器人手臂来分拣投递物品。
2018-09-13 09:10:531236 在一份发表的论文中,美国国家工程院院士,斯坦福大学化学工程系教授鲍哲楠及其团队证明了传感器能够允许机器人手臂握持并不会挤爆娇弱易碎的浆果和乒乓球。鲍哲南表示,位于手套指尖的传感器能够同时模拟实现人类灵活度的两个关键性质:压力的强度和方向。
2018-11-27 08:44:52782 快速发展的机器人助手领域(有时亦被称为协作机器人),正在使机器人成为一种更加廉价、灵活和安全的工具,帮助人们处理寻常任务。慕尼黑的Franka Emika希望凭借自己的机器人手臂Panda能抓住这个机会。
2018-12-01 11:56:46925 Murab项目(通过MRI和超声机器人辅助活组织检查),一只手臂的机器人,准确地放置针头进行活检,同时其系统实时识别肿瘤。约翰介绍这台机器大卫·穆尼奥斯,在哥伦比亚国立大学(UN)和博士生在汉诺威
2019-01-21 15:44:04412 现今肿瘤早期诊断的常见方式为组织活检和基因检测。组织活检需要在手术中从患者肿瘤组织中切片取样,这不仅给患者带来痛苦,还有刺激肿瘤进一步恶化发展的风险;而基因检测用于肿瘤早筛在国内已成红海,且在实际
2019-01-30 13:58:123203 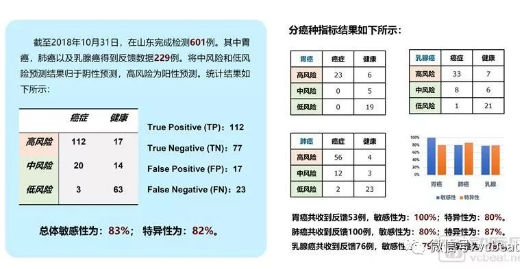
CoroWare公司的全资子公司CoroWare Technologies宣布推出CoroBot®RA-144 ™机械臂的可用性和定价,这是一款功能强大的 机器人 手臂,是CoroBot智能无人驾驶地面车辆(Smart UGV)和 机器人技术 开发平台的补充。
2019-03-25 15:37:37518 机器人“医生”挥舞手臂,人类医生在一旁指挥。这不是科幻片!这是真实上演的场景!
2019-06-13 16:02:502561 肘部的最大位置不能超过140度,因为该项目的目的是在平面上构建机器人手臂,并且将摄像头与用户处保持在同一高度。我们认为只用70度即可,因为这足以弯曲机器人手臂。
2019-08-22 16:27:537475 来自卡内基梅隆大学与明尼苏达大学的研究人员日前利用无创的脑机接口(BCI)技术,成功开发出第一款由大脑控制的机器人手臂,具有连续跟踪计算机光标的能力。
2019-06-28 09:46:42812 机器人手臂的伸缩、横向移动均属于直线运动。
2019-07-08 11:42:3060002 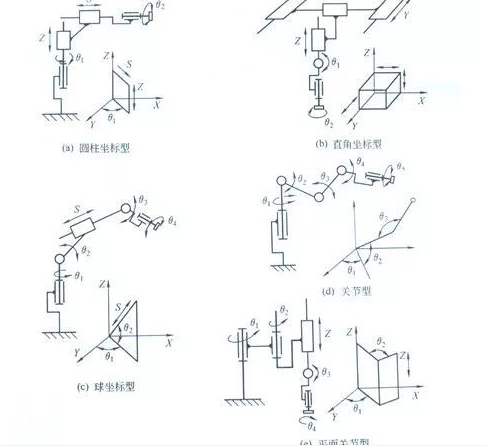
在电子中心期间,我实施了各种机器人,如手势控制机器人,障碍避免机器人,线跟随机器人,机器人手臂,遥控机器人等。
2019-07-29 11:19:159600 在这个项目中,我将向您展示如何构建Arduino& amp;使用Android手机的蓝牙控制机器人手臂。该机器人手臂可以在手动模式下操作,也可以在全自动模式下进行编程。
2019-07-29 09:11:047787 我们使用PVC管和电线套管制作一个自由度(DOF)机器人手臂。用于弯头联合我们使用一个伺服电机。伺服连接到Pin-9的Arduino板。
2019-08-22 16:48:342834 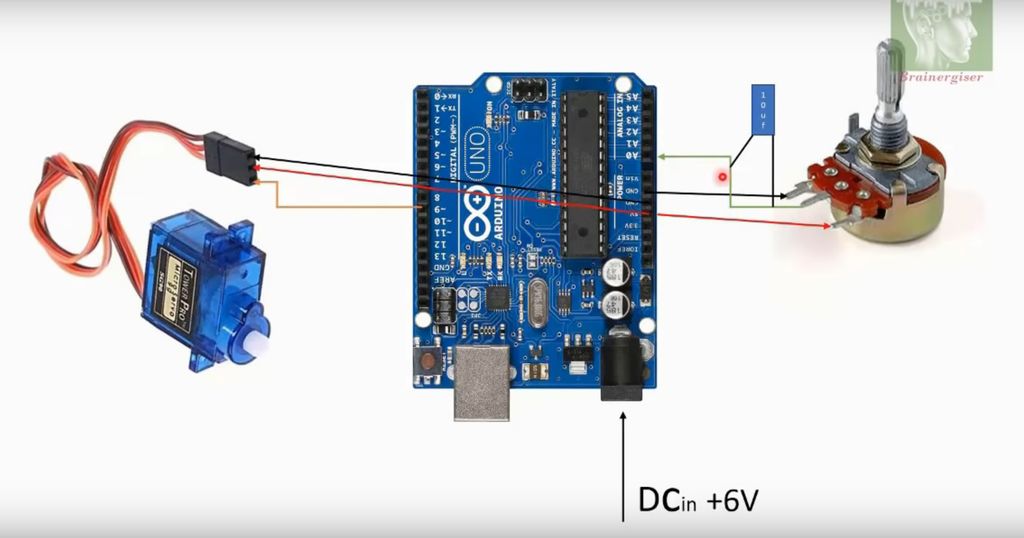
来自卡内基梅隆大学与明尼苏达大学的研究人员日前利用无创的脑机接口(BCI)技术,成功开发出第一款由大脑控制的机器人手臂,具有连续跟踪计算机光标的能力。
2019-08-19 09:33:431462 工业机器人是通过机器人手臂进行工作的,机器人是通过感知、思维、效应方面模拟人的机器系统。
2019-09-12 16:29:211371 随着5G技术的普及,即将迎来AI人工智能时代,很多场景将是无人自动化的控制生产运作,这样我们需要更多的机器人手臂,机器人手臂可以将执行工作的手臂与思考工作的头脑分离。
2019-09-17 09:41:531783 机器人手臂的运动,机器人的机械臂是由数个刚性杆体和旋转或移动的关节连接而成,是一个开环关节链,开链的一端固接在基座上,另一端是自由的安装着末端执行器(如焊枪),在机器人操作时,机器人手臂前端的末端执行器必须与被加工工件处于相适应的位置和姿态,而这些位置和姿态是由若干个臂关节的运动合成的。
2019-10-19 10:37:1516690 能代替“脏乱、危险、严重”的工作的机器人手臂“Float Arm”
2020-04-20 16:06:484925 Motiv太空系统公司正在将太空级机器人技术带到地球界。该公司已经建造了许多创新的机器人,这些机器人已经在多家公司进行了测试,并且向NASA的火星项目提供的机器人手臂也已投放市场。 Motiv
2020-09-29 18:09:551895 第一种AI算法根据情况引导机器人手臂动作。研究团队在特定环境下训练机器人手臂的操作。这被压缩为两轴表示。例如,该算法似乎确定要抓住的物体是门把手还是杯子。
2020-10-28 17:15:121957 碘粒子植入是肿瘤病人治疗的重要方法之一,目前粒子是通过医生之手植入到肿瘤内部,实施精准内放疗。未来有没有可能发明一个机器人来更加精准完成这项技术呢?
2020-11-25 16:30:081688 医疗机器人成功的关键前提是什么?破解“产学研医”结合难题的方法是什么?在北京发展医疗机器人的政策风向如何?
2020-12-28 10:04:091868 在网上有许多关于制作机器人手臂的项目,但他们都有类似的控制方式,我感觉缺少了一些乐趣!所以我们决定制作一个可以使用聊天机器人控制的机器人手臂。如果你说“向左移动 45 度”并且手臂会按照你的指令移动,那么它会有多酷!
2021-03-16 11:47:0030 MH6S工业机器人手册。
2021-03-23 09:11:0410 近年来,随着MEMS及相关技术的发展,微机器人领域已越来越来受人关注。但由于零件的尺寸很小,微机器人组件的装配需要很高的精确度,一般的装配方法无法满足要求。本文介绍了一个可进行微零件装配工作的机器人手臂控制系统的控制方法。
2021-04-07 09:24:472655 
软体机器人手臂由于具有本质柔顺性和连续变形特性,在智能制造、医疗康复,家庭服务等领域有巨大的研究价值和广泛的应用前景。最新一期的机器人顶刊《The International Journal
2021-04-13 11:49:162889 机器人手臂的伸缩、横向移动均属于直线运动。实现手臂往复直线运动的机构形式比较多,常用的有活塞油(气)缸、齿轮齿条机构、丝杠螺母机构以及连杆机构等。由于活塞油(气)缸的体积小、重量轻,因而在机器人
2022-03-17 17:16:42407 电子发烧友网站提供《用纸板制作的手臂星形机器人.zip》资料免费下载
2022-11-08 10:34:010 电子发烧友网站提供《构建可帮助人们做早餐的桌面智能机器人手臂.zip》资料免费下载
2022-12-28 10:36:413 方案介绍MARK 1是可编程的Arduino机器人手臂。但是,还不止这些,该机械臂可以由手势控制。硬件部件:Arduino UNO × 1个 伺服马达MG996R× 6 5V电池组× 1个 PCA9685具有I2C接口的8通道8W 12V FET驱
2022-12-30 14:42:172 在智能机器人手臂–第1部分:机械结构和接线中,我们已经将机械手臂的本体组装在一起。您有没有想过拥有一款可以帮您满足日常需求的设备?而且该设备能够区分您(主人)和其他非授权用户,这并非简单的普通工具。
2023-02-24 14:30:291526 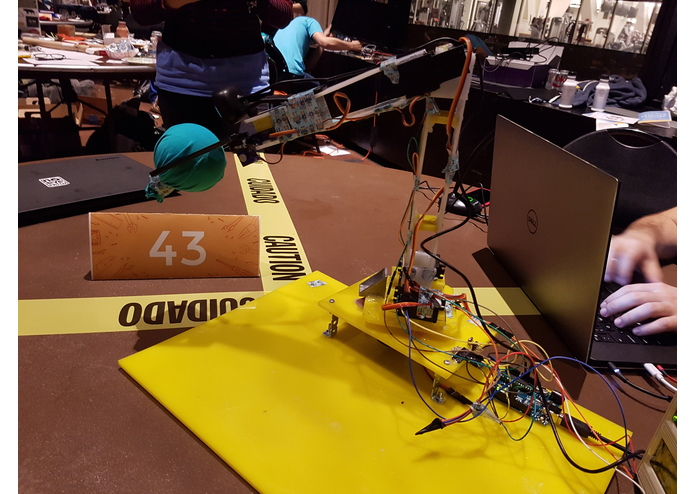
杭州2023年2月27日 /美通社/ -- 近日,史陶比尔集团流体连接器事业部推出机器人手臂末端工具EOAT (End-of-Arm-Tooling) 产品线,自此将能够为广大客户提供一站式自动化
2023-03-01 16:12:49505 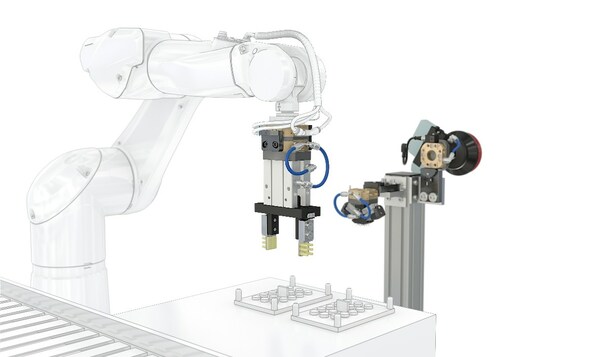
电子发烧友网站提供《用于Arduino Due的DIY Braccio机器人手臂护罩.zip》资料免费下载
2023-06-14 15:07:510 电子发烧友网站提供《Scorbot ER-V+自由度机器人手臂控制器和模拟器设计.zip》资料免费下载
2023-07-10 15:08:570 机器人技术处于工业 4.0、人工智能和边缘革命的前沿。让我们看看如何创建 FPGA 控制的机器人手臂。
2023-10-24 17:15:33457 
机器人技术处于工业 4.0、人工智能和边缘革命的前沿。让我们看看如何创建 FPGA 控制的机器人手臂。
2023-10-24 17:26:20935 
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论