介绍坐标系以及它们之间的变换关系,数学的意味还是很浓的。讲了那么多的公式和规律,它们要怎么用在机器人上呢?这篇文章将介绍坐标系和机器人之间的纽带即连杆坐标系。完成这篇文章的介绍之后我们就可以利用一些
2021-09-01 06:17:14
`如何建立一个具有特定角度的坐标系,并让矩形ROI随坐标系旋转?`
2017-09-18 13:41:57
首先坐标系转换的变换矩阵(没有坐标系矩阵变换的概念可先百度)如图:
2019-06-20 18:34:32
、抓取、装配、入库等训练,2、工业机器人与视觉实训平台包含六自由度工业机器人、智能视觉检测系统、PLC控制系
2021-07-01 06:38:35
工业机器人用于各种应用。这些包括:处理:能够操纵像鸡蛋一样多的车门产品,工业机器人快速强大,灵巧灵敏。应用包括从输送线到包装的拾取和放置以及机器倾斜,其中原料由机器人进给到诸如注塑机,数控铣床和车床
2017-09-07 17:20:32
工业机器人控制器功能多任务功能一台机器人可进行多个任务的操作;
2019-09-12 09:10:22
工业机器人的定义是什么?有哪些特点?工业机器人有哪几个子系统组成?各自的作用是什么?工业机器人的主要技术参数有哪些?
2021-07-05 07:20:36
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。
2020-03-27 09:03:30
工业机器人一般由主构架(手臂)、手腕、驱动系统、测量系统、控制器及传感器等组成。 1图是工业机器人的典型结构。机器人手臂具有3个自由度(运动坐标轴),机器人作业空间由手臂运动范围决定。手腕是机器人
2015-01-19 10:36:12
)对给定机械臂,己知各关节角矢量g(f)=[gl(t),g2(t),......gn(i)]',其中n为自由度。求末端操作器相对于参考坐标系的位置和姿态,称之为运动学正问题。在机器人示教过程中。机器人
2017-12-15 10:25:19
的作用。 根据工业机器人的发展趋势,本书在编写内容上略有偏重。对工业机器人的运动学、动力学、基本控制系统等传统内容的介绍比较简洁;对机器视觉、机器听觉和移动机器人的自主定位等新技术介绍较多,并以可重现
2015-02-03 10:51:09
labview 视觉机器人抓取工件 CCD相机的二维坐标系的建立?希望分享,谢谢
2017-08-18 20:53:37
可以在如下图所示位置找到。注意:在首次安装的时候需要将电脑连接网络,否则可能导致插件安装失败。 二、机器人底盘参考坐标系X轴方向为机器人前进方向,Z轴方向为垂直向上。X轴Y轴的零点为底盘的水平
2019-01-24 14:42:36
机器人的电机传动控制坐标系是怎样确定的,是基于什么控制原理,学习机器人的控制理论有哪些比较经典的书籍,求大神指导?
2013-06-10 17:03:57
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
的指定方向分量异常方便,p1.trans.z就可表示p1位置在z轴方向距离工件坐标系原点的距离。本文简单介绍ABB机器人指令开发过程,其实也就是编写附带了参数的程序。在编程之前需要弄清几个基本概念。任务
2019-10-21 16:36:02
坐标系。下面就来给大家详细介绍一下浩辰CAD制图软件中坐标系及标注坐标的方法吧!首先一起来复习一下关于数学中的坐标系概念。1、笛卡尔坐标系笛卡尔坐标系又称为直角坐标系,由一个原点和两个通过原点的、相互
2020-09-23 10:28:54
1 开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在
2019-07-15 07:48:36
MATLAB建立和控制图形窗口和坐标系命令建立和控制图形窗口 Figure 建立图形 Gcf 获取当前图形的句柄 Clf 清除当前图形 Close 关闭图形 建立和控制坐标系
2009-09-22 16:00:57
本书系统地介绍了工业机器人的基本组成、机械机构、运动学及动力学、控制系统、编程与调试、典型应用、管理与维护等内容。全书共7章,第1章介绍了工业机器人的发展与应用、机器人的组成与分类;第2章介绍了工业
2022-10-16 21:21:57
ZN-RAI02工业机器人与视觉实训平台是什么?ZN-RAI02工业机器人与视觉实训平台有哪些技术性能?ZN-RAI02工业机器人与视觉实训平台的结构是由哪些部分组成的?ZN-RAI02工业机器人与视觉实训平台有哪些配套软件?
2021-08-09 06:22:03
各位大佬请教一下,abb机器人工具坐标系用四点法,六点法,手动输入等方式标定出的工具坐标系的Z方向与实际工具的长度不符,实际工具长度越长坐标系z方向的差距越大。比如实际工具400mm坐标系标定的Z方向是300mm,这种是什么情况?
2024-08-07 11:11:33
请教各位大神如何在Labview中建立CCD相机的二维坐标系。谢谢!
2016-10-08 11:40:19
的移植、HMI、CAN-Bus、API、MFC坐标系的标定五大功能。最后完成一款可以对工业机器人进行示教的示教器研制。实验室配有机器人控制器和机器人本体,因此本课题的实验条件充足。
2015-07-23 22:14:55
机器人按臂部的运动形式分为四种。直角坐标型的臂部可沿三个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。工业机器人按执行机构运动
2015-01-19 10:58:38
)速度空间范围不同:如图 4.1所示,在之前的文章《两轮差速驱动机器人运动模型及应用分析》中对两轮差速驱动机器人的速度空间做了分析,其只有2个自由度,不能沿着机器人坐标系Y轴运动,所以速度空间是一个矩形平面,效果如图 4.1(a)所示;而基于上述分析可知,全向轮平台有3个自由度,既可纵向、横.
2021-08-30 09:15:18
工业机器人的四大特征是哪些?工业机器人是由哪些部分组成的?工业机器人是怎样进行划分的?
2021-10-11 09:10:17
`华南机器人应用培训中心拥有各种设备,开展各种不同的机器人培训班。打造各种工业现场常见的机器人工作站,现开展KUKA、发那科、三菱、ABB、爱普生工业机器人培训对外招生。 一、认识机器人技术:工业
2015-09-02 14:03:18
选择圆柱坐标系后,圆柱坐标系中的ρ、ψ、Z与直角坐标系中的X、Y、Z是如何对应的?
2017-03-02 21:38:18
基本工作单元,以滚珠丝杆、同步皮带、齿轮齿条为常用的传动方式所架构起来的机器人系统,可以完成在XYZ三维坐标系中任意一点的到达和遵循可控的运动轨迹。多轴机器人采用运动控制系统实现对其的驱动及编程控制,直线
2020-07-29 06:57:04
如何使labview中xy图的坐标系与栅格坐标系一致
2015-01-25 21:44:26
;关闭”暂停建图“ ·控制机器人继续扫图 —>保存完善后的地图文件。 总的来说,就是: 加载完毕后,机器人会重置到坐标轴原点,机器人的实际角度与地图坐标系一般都会有一定偏差
2019-01-28 17:27:40
各位大神们如何在labview中建立坐标系啊(对一张图片),感谢各位大神的回复
2017-05-03 10:04:29
如果我的坐标系跟原坐标系不一致,(例如我现在的X轴是原来Y轴的反方向,现在的Y轴是原来的X轴,Z轴不变)更改姿态程序的什么地方,我用的是战舰板的MPU6050软件
2019-07-22 03:05:16
当mpu6050初始放置的时候是倾斜的,如何计算才能把坐标系转换成水平的坐标系?转换后的效果是保证倾角不变,水平转动mpu,出来的数据是水平转动的。我用当前四元数与初始的四元数做差,得到的四元数坐标系还是与mpu坐标系相同,不知道怎么计算才能把坐标系转换成水平的?
2019-07-31 22:19:38
的特征点也能够获取目标的位置等信息。此方法须保证该组特征点在不同坐标系下的位置关系一致, 而对于一般的双目视觉系统, 坐标的计算误差往往会破坏这种关系。 采用在机器人上安装车载摄像机这种局部视觉定位
2019-06-01 08:00:00
招聘:工业机器人助理/学徒,工业机器人储备工程师,工业机器人初级工程师晋升渠道:储备工程师-初级工程师-中级工程师-高级工程师-管理-研发公司福利:储备工程师薪资待遇4000+绩效奖金+加班奖金+节日福利奖金转正后初级工程师5000+绩效奖金+加班奖金+项目提成+技能补贴+节日***
2020-02-12 09:45:59
本文将解决电压方程在静止坐标系与运动坐标系转换问题。本文将呈现的转换关系是电压方程由静止坐标系转换至运动坐标系,反之同理可证。
2021-08-27 07:17:03
请问工业机器人有什么优劣势?
2021-06-18 06:04:14
谁知道这两个坐标系之间该怎么变换啊,显示平坐标系是通过摄像头捕捉画面,再在显示屏上显示的。如果要坐标变换的话,这两个坐标系该怎么变啊。
2016-05-30 18:43:21
知识体系分解细化,对ABB工业机器人知识要点做了针对性解析,并配以详细的操作步骤。全书以工业机器人组成为切入点,系统地介绍了ABB工业机器人的主要技术参数、手动操纵方法、坐标系定义流程、I/O配置过程
2018-10-29 17:03:22
任何跟踪滤波器的最基本特征是坐标系和参考点或该坐标系原点。坐标系和原点的选择依赖于几个因素。这些因素包括由系统跟踪的目标类型、综合到系统中的传感器的类型、来自
2009-07-13 12:11:58 20
20 为了解决实测转子振动时所产生的失真问题, 分析了非正交坐标系中转子振动的变化, 建立了非正交坐标系与正交坐标系的变换关系, 并进行了实验验证。结果表明, 无须强求两个
2009-07-16 10:35:5713 什么是坐标系 &nb
2009-12-31 14:16:11 5011
5011 坐标系与鱼雷运动参数
一、常采用的几种坐标系
在鱼雷航行动力学的研究过程中,根据不同的研究目的,须要采用不同的坐标系。常采用
2010-01-06 16:47:465923 
基于非正交坐标系下的SVPWM改进算法研究
2016-04-19 14:10:447 什么是工业机器人TCP? 为了描述一个刚体在空间的位姿,需在物体上固连一个坐标系,然后确定该坐标系位姿(原点位置和三个坐标轴姿态),即需要6个DOF来完整描述该刚体的位姿[1]。对于工业机器人,需要
2017-09-19 15:07:2413 个坐标系即工具坐标系TCS ,那么这个TOOL坐标系的原点就是所谓的 TCP点工具中心点。在机器人轨迹编程时,就是将工具在另外定义的工作坐标系中的若干位置X/Y/Z和姿态Rx/Ry/Rz记录在程序中。当程序执行时,机器人就会把TCP点移动到这些编程的位置。 TCP类型的有:常
2017-09-29 16:48:393 。这里自由度就是指可运动或转动的轴。直角坐标机器人是以直线运动轴为主,各个运动轴通常对应直角坐标系中的X轴,Y轴和Z轴。在绝大多数情况下直角坐标机器人的各个直线运动轴间的夹角为直角。 直角坐标机器人主要由一些直线运动单元及其组合
2017-10-12 18:24:450 ,主要有关节坐标式机器人, SCARA机器人,直角坐标系机器人,圆柱坐标系机器人及并联机器人,AGV机器人。
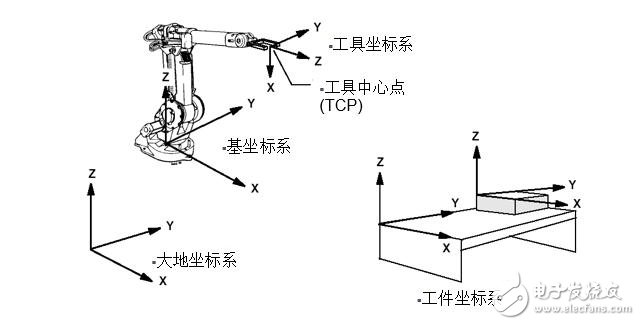
2017-12-26 18:04:4620 坐标系包含:
1、基坐标系(Base Coordinate System)
2、大地坐标系(World Coordinate System)
3、工具坐标系(Tool Coordinate System)
4、工件坐标系(Work Object Coordinate System)
2018-04-02 11:31:002473 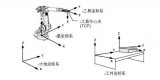
针对借助激光跟踪仪标定机器人所涉及的坐标系统一问题,对基于空间几何法拟合建立的基坐标系与机器人理论基坐标系的转换关系进行了研究,提出了一种基于对偶四元数法的机器人基坐标系标定方法。利用指数积公式推导
2018-03-07 10:43:522 无论是开发2D还是开发3D游戏,首先必须弄清楚坐标系的概念。在Cocos2d-x中,需要了解的有OpenGL坐标系、世界坐标系和节点坐标系。 1.UI坐标系 IOS/Android/Windows
2018-04-27 11:34:001620 世界坐标系:在OpenGL中,世界坐标系是以屏幕中心为原点(0, 0, 0),且是始终不变的。你面对屏幕,你的右边是x正轴,上面是y正轴,屏幕指向你的为z正轴。长度单位这样来定:窗口范围按此单位恰好是(-1,-1)到(1,1),即屏幕左下角坐标为(-1,-1),右上角坐标为(1,1)。
2018-05-04 09:00:0013175 
在我们工业机器人定义中,有四类坐标系,他们分别是轴坐标系、世界坐标系、工具坐标系、基座坐标系。
2018-10-05 17:43:0028646 随着社会进步、科技发展,工业机器人的应用也越来越普遍。由于其种类众多、运动轴与坐标系也很多,确定起来容易出错
2018-11-11 09:37:3511071 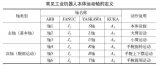
随着社会进步、科技发展,工业机器人的应用也越来越普遍。由于其种类众多、运动轴与坐标系也很多,确定起来容易出错,对于新手尤其如此。本文主要介绍了工业机器人运动轴的命名、坐标系的确定原则及其常用种类
2018-12-21 18:07:018664 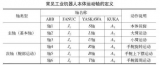
任何机器人都离不开基坐标系,也是机器人TCP在三维空间运动空间所必须的基本坐标系(面对机器人前后:X轴 ,左右:Y轴, 上下:Z轴)。
2019-05-14 09:56:5924322 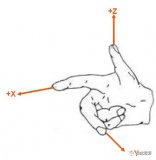
大地坐标系:大地坐标系是以大地作为参考的直角坐标系。在多个机器人联动的和带有外轴的机器人会用到,90%的大地坐标系与基坐标系是重合的。但是在以下两种情况大地坐标系与基坐标系不重合:
2020-05-09 15:49:435868 BASE坐标系: 可根据需要定义用户坐标系。 当机器人配备多个工作台时,选择用户坐标系可使操作更为简单 。在用户坐标系中, TCP 点将沿用户自定义的坐标轴方向运动。
2020-06-12 14:42:017633 坐标机器人又称单轴机械手,工业机械臂,电缸等,是以XYZ直角坐标系统为基本数学模型,以伺服电机、步进电机为驱动的单轴机械臂为基本工作单元,以滚珠丝杆、同步皮带为常用的传动方式所架构起来的机器人系统,可以完成在XYZ三维坐标系中任意一点的到达和遵循可控的运动轨迹。
2020-08-24 09:50:332951 传感器-机器人标定的目的是建立传感器坐标系与机器人坐标系之间的联系。这种转换是将位于3D点云中的零件坐标(即传感器坐标)转换为机器人可以通过其运动/编码器子系统(机器人坐标)执行拾取的位姿数据。
2020-09-18 16:34:074009 机器人视觉检测系统在计算机端对智能相机采集到的工作区域的图像进行预处理,快速地识别并定位图像中的目标工件,根据相机标定参数,结合目标工件的像素坐标计算出六自由度工业机器人坐标系中的位置坐标,并将坐标信息发送给机器人控制器
2020-09-24 10:28:513840 在工业机器人的操作、编程和调试时坐标系具有重要的意义。在机器人控制系统中定义了下列坐标系: ROBROOT 机器人足部坐标系 固定位于机器人足部。 是机器人的原点。 是世界坐标系的参照点
2020-12-23 17:41:206666 工具坐标的特点及用途 机器人控制系统通过测量工具 (工具坐标系)识别工具顶尖 ( TCP - Tool Center Point,即工具中心点 )相对于法兰中心点位于何处以及其方向如何。 因此
2021-01-19 09:17:3511582 是一个可自由定义、用户定制的坐标系说明基坐标在世界坐标系中的位置。用于测量工件和装置。位置在congfig.dat
2022-06-02 15:53:125591 BASE坐标系: 可根据需要定义用户坐标系。 当机器人配备多个工作台时,选择用户坐标系可使操作更为简单 。在用户坐标系中, TCP 点将沿用户自定义的坐标轴方向运动。
2022-09-16 15:35:501023 是一个可自由定义、用户定制的坐标系说明基坐标在世界坐标系中的位置。用于测量工件和装置。
2022-12-27 15:29:418355 世界坐标系,相机坐标系,图像物理坐标系,像素坐标系之间的关系。
2023-03-08 16:44:005371 Frenet坐标系的建立基于一个参考线,这个参考线可以是任意曲线,但在自动驾驶运动规划中一般定义为道路的中心线,这条中心线是地图模块输入过来的一系列离散点。同时使用参考线的切线向量和法线向量建立一个直角坐标系,如图1所示,这个坐标系就是Frenet坐标系。
2023-04-03 10:16:423466 在基准测量时,用户分配给工作面或工件一个笛卡尔坐标系 (BASE 坐标系)。BASE 坐标系的原点为用户指定的一个点。
在需要时,可以让测量点的坐标和姿态以增量和角度显示 (以法兰坐标系为基准)。为此按下测量点。然后通过返回返回到上一个视图。
2023-04-19 09:54:5510454 相机标定(Camera Calibration):因为上面做的只是计算了物体在相机坐标系下的坐标,我们还需要确定相机跟机器人的相对位置和姿态,这样才可以将物体位姿转换到机器人位姿。
2023-04-21 14:15:55832 一般都会定义机器人第一轴的旋转轴为基坐标系Z轴,旋转中心即是坐标系原点,X和Y的方向是的电机零点确定,所以只要你不更换电机的零点和机械结构,单个机器人里这个基坐标系是永远不会变的!
2023-05-11 15:57:442629 
在编程操作过程中,为了确定机器人的空间位置以及姿态的变化,需要建立合适的工具和用户坐标系。工具坐标系用于确定每个工具中心点(TCP)的位置和工具姿势。
2023-05-12 14:43:423322 
ENU局部坐标系采用三维直角坐标系来描述地球表面,实际应用较为困难,因此一般使用简化后的二维投影坐标系来描
述。
UTM:在众多二维投影坐标系中,统一横轴墨卡托(The Universal
2023-06-01 15:59:510 介绍自动驾驶技术中几种常用的坐标系统,以及他们之间如何完成关联和转换,最终构建出统一的环境模型。
所谓时空坐标系,包括三维空间坐标系和一维时间坐标系。在此基础上,用解析的形式(坐标)把物体在
2023-06-02 15:44:500 我们在检测工件时,需要正确的装夹检测工件,使工件有足够的检验空间和恒温时间,坐标系的建立就是为后续的测量奠定基础,建立错误的坐标系直接导致测量尺寸的误差建立正确的参考方向即坐标系是十分重要的。
2023-02-17 10:24:1713370 
激光跟踪仪的机器坐标系是不固定的。激光跟踪仪是采用球坐标系测量系统,在测量的时候,是需要操作者手拿测量靶球,激光跟踪仪射出一道激光主动跟踪测量靶球,在操作者将靶球接触待测工件表面时,激光跟踪仪精确
2023-04-06 17:01:372060 
相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成像过程,以及四个坐标系之间的装换关系。
2023-07-03 10:30:1115237 
焊接机器人常用的四种坐标系:关节坐标系、直角坐标系、工具坐标系和用户坐标系。 关节坐标系: 关节坐标系是焊接机器人中最基本的坐标系之一。它表示机器人的各个关节的位置,通常使用关节角度或编码器值来定义。每
2023-10-18 15:17:211675 
其中r是毫米像素比、(mm/pixel)就是一个毫米有几个像素,theta为两个坐标系之间的夹角,(x0,y0)为图像坐标原点到机械坐标原点的距离。
2023-11-12 09:42:182920 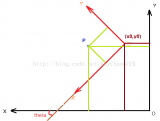
大地坐标系:大地坐标系是以大地作为参考的直角坐标系。在多个机器人联动的和带有外轴的机器人会用到,90%的大地坐标系与基坐标系是重合的。但是在以下两种情况大地坐标系与基坐标系不重合。
2023-11-13 11:24:462990 
坐标系是我们非常熟悉的一个概念,也是机器人学中的重要基础,在一个完整的机器人系统中,会存在很多坐标系,这些坐标系之间的位置关系该如何管理? ROS给我们提供了一个坐标系的管理神器——TF。 机器人
2023-11-22 17:20:232850 
** ros2 run turtlesim turtle_teleop_key 看到的效果和ROS自带的例程相同。 原理解析 在两只海龟的仿真器中,我们可以定义三个坐标系,比如仿真器的全局参考系叫做
2023-11-22 17:35:081584 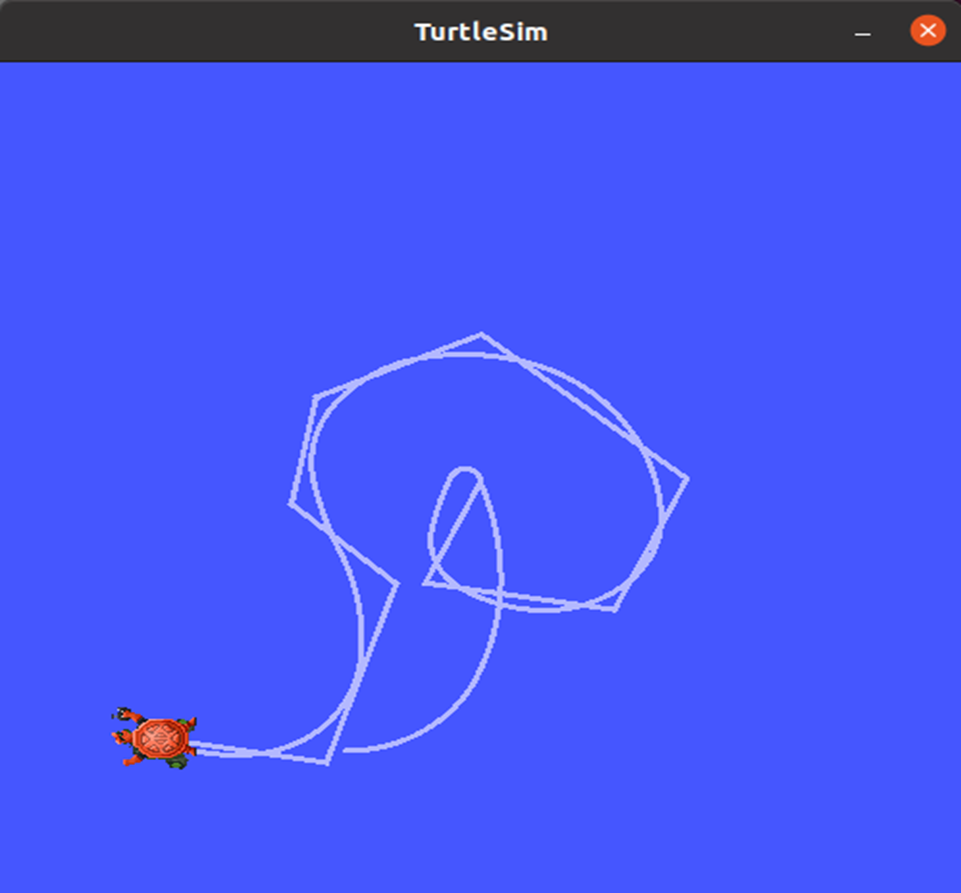
Launch文件解析 先来看下刚才运行的launch文件,里边启动了四个节点,分别是: 小海龟仿真器 海龟1的坐标系广播 海龟2的坐标系广播 海龟跟随控制 其中,两个坐标系的广播复用
2023-11-22 17:44:421472 今天我们要讲的是应用于卫星通信领域的一个坐标转换过程——机体坐标系与ENU坐标系的转换。
2023-12-27 09:30:237760 
ArcMap是一个功能强大的地图制作和分析软件,可以用来设置地理坐标系。地理坐标系是一种将地球表面上的位置表示出来的方法,它使用经度和纬度来确定地点。 要设置地理坐标系,可以按照以下步骤进行操作
2024-02-25 13:41:246225 、可靠地工作的关键步骤。无论是为了确保定位精度、测试信号干扰的影响,还是评估在复杂环境下的导航可靠性,掌握正确的坐标系知识对于进行有效的仿真测试至关重要。 在GNSS仿真测试的领域,三种关键的坐标系构成了我们工作的核心:地心地固坐标系(
2024-05-24 13:17:473381 
,tool0表示工具坐标系,base0表示基座坐标系,zone0表示运动区域,ref0表示参考点。 1.2 MoveC指令 MoveC指令用于控制机器人沿圆弧轨迹运动。其
2024-06-17 09:35:5915104 三坐标测量机的机器坐标系和原点是其测量系统中的重要概念,以下是详细介绍:一、机器坐标系(1)定义:机器坐标系是三坐标测量机固有的坐标系,是测量机进行测量和数据处理的基础。它是基于测量机的机械结构
2025-03-10 10:34:461254 
 电子发烧友App
电子发烧友App












 工商网监
工商网监
评论