 电子发烧友App
电子发烧友App


你听过机器人三守则吗?
第一条:机器人不得伤害人类,或看到人类受到伤害而袖手旁观。
第二条:机器人必须服从人类的命令,除非这条命令与第一条相矛盾。
第三条:机器人必须保护自己,除非这种保护与以上两条相矛盾。
你难道没觉得这三守则充满BUG吗?你真的认为自私满腹的人类造出的机器人真的会乖乖听话吗?
最近,有学者表示未来随着人工智能的发展,人类将可以与性爱机器人生育孩子并可借3D打印分娩。其中《与机器人的爱与性》一书的作者DavidLevy博士声称,由于干细胞研究和人造染色体方面的快速发展,人类与机器人“混血儿”将很快诞生。并且性爱机器人萨曼莎的发明者SergiSantos预测人类和机器将会结婚并会借助科技创造后代。
作为一名持续关注性爱机器人发展……啊不……科技发展的小编来说,机器人能有这样的发展,其实一点也不奇怪。
因为早在我国西周时代(公元前1066年~前771年),就流传着有关巧匠偃师献给周穆王一个艺妓(歌舞机器人)的故事,有《列子·汤问》篇记载为证。还流传了这么一个典故:偃师造人、唯难于心。就是说技艺再好,人心难造。
春秋时代(公元前770年—前467年)后期,被称为木匠祖师爷的鲁班,利用竹子和木料制造出一个木鸟。它能在空中飞行,“三日不下”,这件事在古书《墨经》中有所记载,这可称得上世界第一个空中机器人。
公元前3世纪,古希腊发明家戴达罗斯用青铜为克里特岛国王迈诺斯塑造了一个守卫宝岛的青铜卫士塔罗斯。
公元前2世纪,古希腊人发明了一个机器人,它是用水、空气和蒸汽压力作为动力,能够动作,会自己开门,可以借助蒸汽唱歌。
东汉时期(公元25年—220年),我国大科学家张衡,不仅发明了震惊世界的“候风地动仪”,还发明了测量路程用的“计里鼓车”。车上装有木人、鼓和钟,每走1里,击鼓1次,每走10里击钟一次,奇妙无比。
三国时期的蜀汉(公元221年—263年),丞相诸葛亮既是一位军事家,又是一位发明家。他成功地创造出“木牛流马”,可以运送军用物资,可成为最早的陆地军用机器人。
500多年前,达·芬奇在手稿中绘制了西方文明世界的第一款人形机器人,它用齿轮作为驱动装置,由此通过两个机械杆的齿轮再与胸部的一个圆盘齿轮咬合,机器人的胳膊就可以挥舞,可以坐或者站立。更绝的是,再通过一个传动杆与头部相连,头部就可以转动甚至开合下颌。而一旦配备了自动鼓装置后,这个机器人甚至还可以发出声音。后来,一群意大利工程师根据达·芬奇留下的草图苦苦揣摩,耗时15年造出了被称作“机器武士”的机器人。
1738年,法国天才技师杰克·戴·瓦克逊发明了一只机器鸭,它会嘎嘎叫,会游泳和喝水,还会进食和排泄。瓦克逊的本意是想把生物的功能加以机械化而进行医学上的分析。
1768—1774年间瑞士钟表名匠德罗斯父子三人设计制造出三个像真人一样大小的机器人——写字偶人、绘图偶人和弹风琴偶人。它们是由凸轮控制和弹簧驱动的自动机器,至今还作为国宝保存在瑞士纳切特尔市艺术和历史博物馆内。
1893年,加拿大摩尔设计的能行走的机器人“安德罗丁”,是以蒸汽为动力的。
1928年, W. H. Richards发明出第一个人形机器人埃里克·罗伯特(Eric Robot)。这个机器人内置了马达装置,能够进行远程控制及声频控制。
同样在1928年,日本生物学家Makoto Nishimura研发出了本土的第一个机器人Gakutensoku。
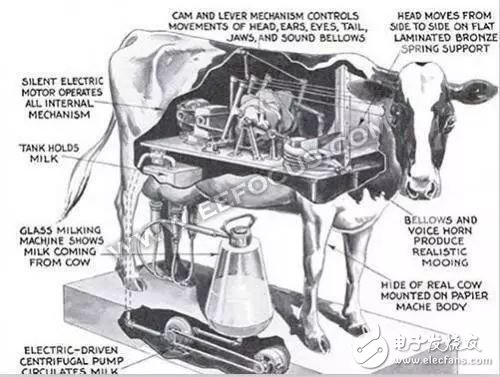
1933年世博会上展出了这种长得像奶牛的机器人,它是由纽约一家致力于动物机器人的小公司Messmoreand Damon制造的。说起它的作用,似乎就只是从自己的假身体里挤出假奶罢了。
1935年,这个机器人的发明受到了很大争议,它会遵守简单的命令比如“站立”,还能开枪。让人后背发凉的是——这家伙的“开枪”指令有时候并没有那么听话,曾经误伤助理的黑历史无可避免地给这款机器人蒙上了一层“反攻人类”的阴影。
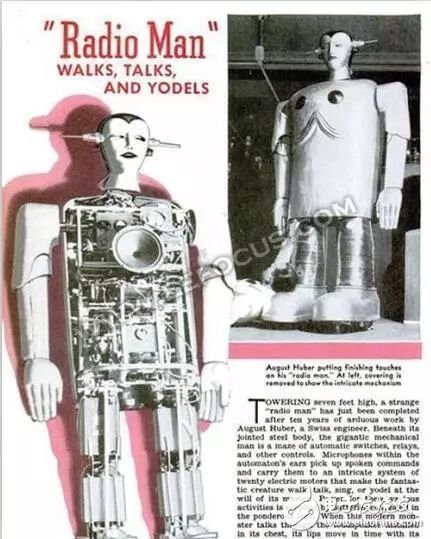
1939年,瑞典发明家August Huber发明的电波机器人长相鬼畜,身材比例也不协调,但却可以接受无线电波传送的指令,从而实现“行走”的目的。
1951年,芝加哥的Clifford H. Landis设计了一款机器人,它可以演示完美的高尔夫挥杆动作。
看到这里,你一定有两种感觉:1,真的假的,这么牛?2,这玩意有什么用?不过在机器人发展初期,就是需要脑洞大开的探索者。随着科技进步,机器人也渐渐变得实用,下面我们从第一个机器人公司开始说。
1956年,世界第一家机器人公司成立,美国发明家乔治·德沃尔(George Devol)和物理学家约瑟·英格柏格(Joe Engelberger)成立了一家名为Unimation的公司,公司名字来自于两个单词“Universal”和“Animation”的缩写。
1958年,美国阿拉贡试验室李先推出世界第一个现代实用机器人——仆从机器人。这是一个装在四轮小车上的遥控机器人,其精彩的操作表演,曾在第二届和平利用原子能大会上引起与会科学家的极大兴趣。
1959年,乔治·德沃尔和约瑟·英格柏格发明了世界上第一台工业机器人,命名为Unimate(尤尼梅特),意思是“万能自动”。英格伯格负责设计机器人的“手”、“脚”、“身体”,即机器人的机械部分和完成操作部分;由德沃尔设计机器人的“头脑”、“神经系统”、“肌肉系统”,即机器人的控制装置和驱动装置。
1961年,Unimation公司生产的世界上第一台工业机器人在美国特伦顿(新泽西州首府)的通用汽车公司安装运行。这台工业机器人用于生产汽车的门、车窗把柄、换档旋钮、灯具固定架,以及汽车内部的其他硬件等。
1962年,美国机械与铸造公司(American Machine and Foundry,AMF)制造出世界上第一台圆柱坐标型工业机器人,命名为Verstran(沃尔萨特兰),意思是“万能搬动”。该年,AMF制造的6台Verstran机器人应用于美国坎顿(Canton)的福特汽车生产厂。
1966年,美国海军使用机器人“科沃”,港至750来深的海底。成功地打捞起一枚失落的氢弹。这轰动一时的事件,使人们第一次看到了机器人潜在的军事使用价值。
1967年,一台Unimate机器人安装运行于瑞典的Metallverken,Uppsland V?sby,这是在欧洲安装运行的第一台工业机器人。
1969年,美国在越南战争中,首次使用机器人驾驶的列车,为运输纵队排险除障,获得巨大成功。
1969年,通用汽车公司在其洛兹敦(Lordstown)装配厂安装了首台点焊机器人。
1969年,挪威Trallfa公司提供了第一个商业化应用的喷漆机器人。
1969年,Unimation公司的工业机器人进入日本市场。
1969年,日本早稻田大学加藤一郎实验室研发出世界上第一台以双脚走路的机器人。
1970年,在美国芝加哥举行第一届美国工业机器人研讨会。一年以后,该研讨会升级为国际工业机器人研讨会(International Symposium on Industrial Robots,ISIR)。
1971年,日本机器人协会(Japanese Robot Association)成立。这是世界上第一个国家机器人协会。
1972年,意大利的菲亚特汽车公司(FIAT)和日本日产汽车公司(Nissan)安装运行了点焊机器人生产线。这是世界第一条点焊机器人生产线。
1973年,第一台机电驱动的6轴机器人面世。德国库卡公司(KUKA)将其使用的Unimate机器人研发改造成其第一台产业机器人,命名为Famulus,这是世界上第一台机电驱动的6轴机器人。
1973年,日本日立公司(Hitachi)开发出为混凝土桩行业使用的自动螺栓连接机器人。这是第一台安装有动态视觉传感器的工业机器人。
1974年,第一台小型计算机控制的工业机器人走向市场。
1974年,第一台弧焊机器人在日本投入运行。日本川崎重工公司将用于制造川崎摩托车框架的Unimate点焊机器人改造成弧焊机器人。同年,川崎还开发了世界上首款带精密插入控制功能的机器人,命名为“Hi-T-Hand”,该机器人还具备触摸和力学感应功能。
1974年,瑞典通用电机公司(ASEA,ABB公司的前身)开发出世界上第一台全电力驱动、由微处理器控制的工业机器人IRB 6。
1975年,Olivetti公司开发出直角坐标机器人“西格玛(SIGMA)”,它是一个应用于组装领域的工业机器人,在意大利的一家组装厂安装运行。
1977年,首届恩格柏格(Engelberger)机器人奖颁布。恩格柏格机器人奖是世界上最负盛名的机器人荣誉。
1978年,美国Unimation公司推出通用工业机器人(Programmable Universal Machine for Assembly,PUMA),应用于通用汽车装配线,这标志着工业机器人技术已经完全成熟。
1978年,日本山梨大学(University of Yamanashi)的牧野洋(Hiroshi Makino)发明了选择顺应性装配机器手臂(Selective Compliance Assembly Robot Arm,SCARA)。这是世界第一台SCARA工业机器人。
1978年,德国徕斯(Reis)机器人公司开发了首款拥有独立控制系统的六轴机器人RE15。
1979年,日本不二越株式会社(Nachi)研制出第一台电机驱动的机器人。
1981年,美国卡内基-梅隆大学的Takeo Kanade设计开发出世界上第一个直接驱动机器人手臂(Direct Drive Robotic Arms)。
1981年,美国PaR Systems公司推出第一台龙门式工业机器人。
1984年,美国Adept Technology公司开发出第一台直接驱动的选择顺应性装配机器手臂(SCARA),命名为AdeptOne。
1984年,瑞典ABB公司生产出当时速度最快的装配机器人,IRB 1000。
1985年,德国库卡公司(KUKA)开发出一款新的Z形机器人手臂,它的设计摒弃了传统的平行四边形造型。
1985年,工业机器人被列入了国家“七五”科技攻关计划研究重点,目标锁定在工业机器人基础技术、基础器件开发、搬运、喷涂和焊接机器人的开发研究等五个方面。
1985年,上海交通大学机器人研究所完成了“上海一号”弧焊机器人的研究,这是中国自主研制的第一台6自由度关节机器人。
1987年,国际机器人联合会(International Federation of Robotics,IFR)成立。
1988年,国际机器人联合会(IFR)发布第一份全球工业机器人统计报告。
1988年,上海交通大学机器人研究所完成了“上海三号”机器人的研制。
1989年,unimation公司出售给史陶比尔(St?ubli)公司。
1990年,工业喷漆机器人PJ-1如期完成。这是我国第一台喷漆机器人。
1992年,瑞典ABB公司推出一个开放式控制系统(S4)。S4控制器的设计,改善了人机界面并提升了机器人的技术性能。
1992年,瑞士的Demaurex公司出售其第一台应用于包装领域的三角洲机器人(Delta robot)给罗兰公司(Roland)。
1996年,德国库卡公司(KUKA)开发出第一台基于个人计算机的机器人控制系统。
1996年瑞典家电巨头伊莱克斯(Electrolux)制造了世界上第一台量产型扫地机器人的原型——“三叶虫”。
1997年6月18日我国6000米无缆水下机器人试验应用成功,标志着我国水下机器人技术已达到世界先进水平。
1998年,瑞典ABB公司开发出灵手(FlexPicke)机器人,它是当时世界上速度最快的采摘机器人。
1998年,瑞士Güdel公司开发出“roboLoop”系统,这是当时世界上唯一的弧形轨道龙门吊和传输系统。
1999年,德国徕斯(Reis)机器人公司在机器人手臂内引入集成激光束指导系统。
2000年,我国独立研制的第一台具有人类外形、能模拟人类基本动作的类人型机器人在长沙国防科技大学问世。
2001年,美国麻省理工学院研发出了世界上第一个有模拟感情的机器人。
2001年,第一款量产扫地机器人上市。
2003年,机器人参与火星探险计划。火星探测使命是一个正在进行的探索火星的太空任务。两台漫游者机器人于2003年开始探索火星表面和地质任务。
2003年,德国库卡公司(KUKA)开发出第一台娱乐机器人Robocoaster。
2004年,日本安川(Motoman)机器人公司开发了改进的机器人控制系统(NX100),它能够同步控制四台机器人,可达38轴。
2007年,德国库卡公司(KUKA)推出了1000公斤有效载荷的远距离机器人和重型机器人,它大大扩展了工业机器人的应用范围。
2008年,日本发那科(FANUC)公司推出了一个新的重型机器人M-2000iA,其有效载荷约达1200公斤。
2008年,世界上第一例机器人切除脑瘤手术成功。施行手术的是卡尔加里大学医学院研制的“神经臂”。
2008年11月25日,国内首台家用网络智能机器人——塔米(Tami)在北京亮相
2009年,瑞典ABB公司推出了世界上最小的多用途工业机器人IRB120。
2010年,德国库卡公司(KUKA)推出了一系列新的货架式机器人(Quantec),该系列机器人拥有KR C4机器人控制器。
2011年,第一台仿人型机器人进入太空。
2014年,国内首条“机器人制造机器人”生产线投产。
2014年英国雷丁大学的研究表明,有一台超级电脑成功让人类相信它是一个13岁的男孩儿,从而成为有史以来首台通过“图灵测试”的机器。
2015年,中国研制出世界首台自主运动可变形液态金属机器。
2015年,世界级“网红”——Sophia(索菲亚)诞生。
2017年10月26日,索菲亚在沙特阿拉伯首都利雅得举行的“未来投资倡议”大会上获得了沙特公民身份,也是史上首位获得公民身份的机器人。
2017年11月,美国加州的Abyss Creations公司宣布,真正意义上的性爱女机器人已经成功研发,并正式进入全球市场开始销售,10000美元起售!
除此之外,2017年还有很多让人惊讶的机器人,如全球首款社交机器人Jibo,会翻跟头的人形机器人Atlas,







 工商网监
工商网监
评论