程目标:本课程是基于ARM+Linux的软硬件培训体系结构。培训课程的重点是:S3C6410及其外围芯片的设计与编程,ARM底层模块开发,驱动等。linux内核开发,嵌入式linux的内核
2021-12-22 07:03:20
。Step3正确安装RDS2.2 后会出现两个调试器。AXD debugger v1.31 和Realview Debugger v1.8这里以AXD debugger 为例介绍JLink V8 的使用................S3C6410的JLink的调试方法下载地址:
2015-05-19 17:29:32
`这是一个对于S3C6410比较全面的裸机开发教程,虽然是对应友善之臂的开发板,对于不是用友善之臂板子的也可以借鉴很多,看来友善之臂资料做得相当不错啊。下面是目录,可以看到内容很全面: 下面是简介: 下面提供下载的压缩包,是一个压缩文件,解压后得到以下文件: `
2015-12-22 09:30:25
各位大侠,s3c6410支持哪些屏幕啊?随便买个屏幕都可以用吗?
2013-11-09 11:12:22
我在s3c6410的xu***xti和xu***xto的脚位上接了一个48M晶振(如图所示),可ARM板启动后测得晶振频率为16M,并且USB口不能工作(USB驱动已经装上了),在此请教高手帮着指点一二,这个问题已经困惑我好长时间了,在这先谢谢了{:soso_e179:}
2011-10-10 09:55:09
第二章 机器人系统与控制需求简介2.1 工业机器人的系统组成机械本体:精密减速机、伺服电机、伺服驱动器、控制系统(核心零部件)控制柜示教盒2.2 机器人本体结构与传动方式简介四大家族:ABB
2021-09-08 07:44:15
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
目前产业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对产业机器人的运动轨迹进行示教或离线编程,可节约
2015-01-23 15:02:27
的三维世界的识别。机器人视觉主要研究用计算机来模拟人的视觉功能从客观事物的图像中提取信息,进行处理并加以理解,最终用于实际检测、测量和控制。机器视觉是人工智能正在快速发展的一个分支。简单说来,机器视觉就是
2020-08-28 10:48:50
视觉系统成为研究的新课题。1965年, Stanford建立机器人实验室开始研究机器人。机器人的定义:【机器人】是一种可以用来移动材料,零件,工具或特定装置的可以重新编程的多功能操...
2021-09-07 08:37:58
现在想做机器人图像识别方面的研究,有问题请教大家,比如说:现在有十种瓶子,机器人能识别我指定的瓶子,并把它从A位置移动到B位置,关键是如何识别呢,不是很清楚,求大神指点!在此感激不尽!
2019-11-04 09:02:57
若说当下的热门科技,机器人绝对算一个。机器人作为典型的机电一体化技术密集型产品,它是如何实现运作的呢? 机器人的控制分为机械本体控制和伺服机构控制两大类,伺服控制系统则是实现机器人机械本体控制
2021-09-17 08:22:50
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理机器人的基本工作原理是示教
2021-09-13 08:40:55
视觉技术是近几十年来发展的一门新兴技术。机器视觉可以代替人类的视觉从事检验、目标跟踪、机器人导向等方面的工作,特别是在那些需要重复、迅速的从图象中获取精确信息的场合。
2019-09-04 08:00:27
安全,对一些特殊工种,如喷涂,铸造等通过劳动法强制采用工业机器人来代替,这样可以大大增加工业机器人的需求数量。视觉机器人我国的机器人产业化必须由市场来拉动,机器人作为高新技术,它的发展与社会的生产、经济状况
2016-09-08 10:34:05
传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿人机器人
2019-09-18 06:17:46
文中提出的TMS320DM6437+TMS320F28015的软硬件设计方案在新型球形机器人控制系统中得到初步应用,验证了理论设计的可行性和可靠性,实验结果表明接口数据读写高效可靠。本设计对以后其他双核控制系统接口的设计与研究工作具有很好的参考价值。
2021-05-27 06:46:44
的集中视觉足球机器人底层控制系统,简化了系统设计, 满足微型机器人的控制需要。同时, 也有利于足球机器人自主化的转型和发展。
2009-03-28 14:03:25
为对几何体的识别和抓放过程ꎮ利用边缘提取、滤波去噪、圆心检测等算法采用LabVIEW视觉模块及其库函数进行了图像的预处理、特征提取以及中心点定位ꎮ研究结果表明基于LabVIEW的Tripod机器人系统能够准确识别平台几何体的颜色和形状可较为精确地定位几何体中心满足后续控制的要求
2019-06-01 06:00:00
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色
2023-12-21 20:03:18
自动或半自动机器人常常需要嵌入式控制系统,从而能够结合高度智能化的确定性控制,并且可以方便地连接到不同的传感器和执行器上。NI提供了多种嵌入式硬件平台,以满足复杂系统的需求。从尖端的机器人研究项目直至高级行业应用,NI平台被证实是高效的机器人解决方案。
2019-11-06 07:50:49
本人正在学习ARM开发, 开始在淘宝上买了S3C6410的ARM 11开发板, 但后来在网上搜索了下, 基本上ARM的招工单位都要求用STM32.所以我的疑问是, 在目前的市场和未来的方向上, 是S3C6410将占主流还是STM32占主流?
2014-06-14 11:59:28
ZN-RAI02工业机器人与视觉实训平台是什么?ZN-RAI02工业机器人与视觉实训平台有哪些技术性能?ZN-RAI02工业机器人与视觉实训平台的结构是由哪些部分组成的?ZN-RAI02工业机器人与视觉实训平台有哪些配套软件?
2021-08-09 06:22:03
S3C6410的USB通讯小项目外包:硬件:S3C6410开发板(用现成的)软件要求:通过USB线使S3C6410开发板能与PC机通讯下载文件。 说明:其实开发板上的EBOOT已经
2010-09-29 14:52:53
机器人在之前的机器人的基础上,加入了可以自由便捷的运动功能,两个摄像头精准拍摄、全方位的视觉功能,还有一个超声传感器功能。传感器可以识别人类和NAO机器人的接触,从而做些动作和人类互动,所以说NAO机器人机器人真的可以让我们体验到智能的时代。
2015-02-13 15:43:24
,对工业机器人的运动学、动力学、基本控制系统等传统内容的介绍比较简洁,对机器视觉、机器听觉和移动机器人的自主定位等新技术介绍较多,并以可重现的若干实例对相应技术和方法进行了验证,相关程序代码附在书中,重点
2016-06-01 13:12:46
, 采摘机器人结构简图如图1.3所示。主要研究了采摘机器人的全向移动底盘、机械手及其控制、视觉识别系统和整机的控制系统。
图1.2草莓采摘机器人系统框图
图1.3整机采摘机器人结构图
根据某
2023-08-16 17:35:54
,正在选取合适的AI加速系统,工业用品,有小巧,稳定,成本等方面考虑,正在选型。 ④项目开展,按时间计划实施。⑤项目调试,优化,分享。 预计成果 完成基于机器视觉的工业机器人抓取工作站,并拿出基于机器视觉的工业机器人抓取路径规划方案的典型应用作为核心技术,加以推广。
2019-09-18 14:18:14
的应用,利用USB摄像头采集成图像,经自动识别后控制机器人动作。这是一个平台类的产品设计工程,调整程序就可适用于相关的娱乐,教学,护理等机器人系统中。
2015-07-25 11:19:27
拿到一个题目,视觉采摘机器人。目前对视觉处理方面毫无头绪,由于条件有限,只做出概念实物。机器人只有达到识别该果蔬并采摘下来的效果。有没有大神提供一下思路。
2018-04-10 09:22:27
方面的原理,在线的实时调整图像雅可比矩阵。通过二维的图像特征信息反馈,这种方式对摄像机模型误差和机器人模型误差、图像误差、图像噪声不敏感。基于图像跟踪的视觉跟踪控制系统,如图4。 控制量c为机器人
2014-08-04 11:32:43
三星S3C6410芯片手册
2016-01-29 13:47:21
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
ROVER C5 V0501 机器人控制系统采用国际流行的开放式软硬件平台,配以自主研发的避障控制卡、牵引运动卡及机器人内控专用编码器和安全接口;
2019-09-12 09:00:12
工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。工业
2015-01-19 10:58:38
《先进机器人控制》从控制的角度系统地介绍了机器人学的基础知识和当前的发展状况。全书共分为12章,由基础篇、控制结构篇和先进控制篇构成。基础篇着重介绍串联关节机器人的运动学、运动规划和动力学。其中
2017-09-19 15:30:57
`小弟最近弄到了一块s3c6410板子,没有任何资料,有没有哪位大哥有这个核心板的原理图或者针脚定义,网上也查了好久,没有找到,实在不行小弟准备去请人把cpu取下来自己测量画图了,如果有哪位大哥有的话就简单了,小弟在这叩谢了!`
2019-10-29 12:50:53
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-07-05 07:08:47
本文以6- PPPS并联机器人为控制对象,以NI公司的系列软硬件产品为基础,依托国家自然基金(No. 30770538)的支持,快速开发了此并联机器人的开放式数字控制系统。
2021-05-12 06:38:22
和提高工作效率,就必须引入机器视觉技术来实现对目标的识别和定位。目前,装备了机器视觉系统的工业机器人已经被应用于许多领域。在许多自动化的生产线上,最后一道工序就是把产品摆放整齐,然后打包成型,而许多行业的产品体积
2021-04-29 09:42:45
S3C6410的USBWIFI支持(Android2.1) Topic:S3C6410支持USB WFI//整理:友坚科技http://www.urbetter.com
2010-12-16 09:09:44
在当今的机器人领域,基于视觉的人脸面部识别和检测发展得非常之快,并且已经运用于很多领域。
2019-09-17 09:11:43
OK6410+QT移植百科全书 下载地址:基于S3C6410的QT移植方法及源码下载地址:百度网盘:http://pan.baidu.com/s/1hqCf03q
2015-05-19 17:39:29
基于S3C6410的无线视频传输节点设计
2015-03-27 14:54:45
协调完成多传感信息的融合,而运动执行层完成机器人行走。图1为智能导览机器人的总体结构框图。3 导览机器人硬件设计3.1 人工智能层硬件实现 考虑到移动机器人控制系统要求处理速度快、方便外围设备扩展
2019-07-04 08:30:00
感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿人机器人中应用的传感器种类繁多,例如视觉传感器、电子罗盘、加速度计和超声波传感器等都是仿人机器人中常用的传感器。DF-1机器人
2019-06-21 07:04:37
研究的前沿,它在一定程度上代表了一个国家的高科技发展水平。运动控制系统是机器人控制技术的核心,也是机器人研究领域的关键技术之一,在机器人控制中具有举足轻重的地位,因此,各研究机构都把对机器人运动控制系统的研究作为首要任务。
2020-08-19 06:57:09
用CompactRIO和LabVIEW开发下一代机器人控制系统Author(s):Bill Miller - FIRST Frank Merrick - FIRSTKate Pilotte
2019-05-15 09:40:01
研究了一种用FPGA技术实现三轮全方位移动机器人运动控制系统的方法,与双DSP结构,DSP+CPLD结构,以及DSP+专用集成电路结构等相比,该方法具有简单可靠,扩展性强等特点。且FPGA设计简单,使用方便,开发周期短,能够实现真正的SOPC系统。
2019-10-22 07:35:19
制造出像人一样具有智能的能替代人类劳动的机器人,一直是人类的梦想,人类获取的信息80%以上是通过视觉。因此,在智能机器人的研究中,具有视觉的机器人的研究也就成了第一位的。对机器人视觉伺服系统的研究是机器人领域中的重要内容之一,其研究成果可应用在机器人自动避障、轨迹跟踪和运动目标跟踪等问题中。
2019-09-27 08:07:35
最近想做个机械视觉的东西,我还看了s5pv210,资料太少不敢选现在纠结的是s3c6410性能要强很多,但是资料不如2440多我是新手,想先做实物,完成对坐标的标定,不知道哪个上手合适?
2014-01-09 09:05:20
?举例: 工业机器人系统由三大部分六个子系统组成,1、三大部分是:(1)机械部分(2)传感部分(3)控制部分2、六个系统(1)驱动系统,要使用机器人的运行起来,就需给各个关节即每个运动自由度安置
2016-03-06 12:56:19
树莓派和其他机器人的控制器有何不同?如何使用树莓派开发智能机器人控制系统?
2021-12-23 06:55:02
如何在S3C6410的板子上安装Ubuntu?
2022-01-13 06:12:06
,导航技术,计算机技术,人工智能等多个领域,因而对移动机器人的控制部分提出很高的要求,特别是视觉传感器的出现,要求控制系统不仅存储量大,而且处理速度快等。以往基于PLC和单片机控制的移动机器人就不能很好
2020-11-23 15:08:52
小白求助,求基于嵌入式处理器S3C2440为核心的多任务机器人控制系统
2021-10-21 08:28:01
移动机器人是一种能够感知外部环境,在有障碍物的环境中能够实现动态决策与规划,从而完成避障等多种功能的综合系统。机器人系统通常分为机构本体和控制系统两部分,控制系统的作用是根据用户的指令对机构本体进行
2020-03-06 07:07:07
随着人口老龄化进程的加快,更多老年人,尤其是地震和疾病致残的残疾人,都需要照顾。基于此,这里提出一种基于ARM的嵌入式服务机器人控制系统设计。该服务机器人的控制系统是机器人的神经中枢,因而其设计是机器人研究的核心。该控制系统通常以MCU、 DSP等为核心,采用上、下位机二级分布式结构。
2019-10-15 08:03:16
最近在看工业机器人的资料,想知道现在的一些市面上的工业机器人上用的控制控制系统都有哪些厂商呀?
2015-01-23 12:04:01
、抓取、装配、入库等训练,2、工业机器人与视觉实训平台包含六自由度工业机器人、智能视觉检测系统、PLC控制系
2021-07-01 06:38:35
。可以进行六轴机器人示教、定位、抓取、装配等训练,包含六自由度工业机器人、智能视觉检测系统、PLC控制系统及
2021-07-01 11:48:31
工业机器人的产业链分为上游核心零部件,中游本体和传感器等生产,以及下游的系统集成等。核心零部件是减速机、伺服系统、控制系统三部分,分别对应执行系统、驱动系统、控制系统,分别占成本的35%、25
2017-08-23 15:10:27
形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。 机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。 工业机器人控制技术
2018-11-23 10:40:38
、模拟焊接、立体库等模块)、PLC控制系统、安全防护系统、供气系统等组成。该平台集成了机器人技术、机械设计、电气控制、PLC应用、人机界面等先进技术。本产品主要训练学生掌握机器人的操作与编程,掌握
2021-07-01 10:40:59
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息处理
2019-08-21 07:51:24
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息处理
2019-08-30 08:23:42
在物流搬运行业,拳头机器人由于其独特的并联结构,常用于高速整列、装箱等场合。其中,拳头机器人的视觉线跟踪技术正得到广泛的应用,如下图所示:
2020-08-06 06:30:31
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-06-30 06:37:34
随着计算机科学和自动控制技术的发展,越来越多的不同种类的智能机器人出现在工厂、生活当中,机器人视觉系统作为智能机器人系统中一个重要的子系统,也越来越受到人们的重视。它涉及了图像处理、模式识别和视觉
2020-04-07 07:27:24
视觉系统的发展趋势怎么样?3D视觉系统应用在哪些方面?未来的机器人3D视觉系统将会发生什么样的变化?
2021-05-11 06:40:14
的,优秀的视觉识别系统是难以想像的。 了解机器人视觉系统 一般来说,机器视觉系统包括了照明系统、镜头、摄像系统和图像处理系统。对于每一个应用,我们都需要考虑系统的运行速度和图像的处理速度、使用彩色还是
2021-04-12 10:50:55
什么是激光SLAM?激光SLAM技术在机器人运动控制系统中的应用是什么?
2021-07-30 06:37:25
移动机器人运动控制系统设计及控制算法研究
2012-08-20 15:54:16
足球机器人控制中的应用--毕业论文足球机器人融合了计算机视觉、模式识别、决策对策、自动控制、无线通信、多智能体合作等多项摘要 技术,具有极高的研究价值。本文设计了基于A R M 7微处理器的集中视觉
2009-05-25 15:35:22
远程遥控的类人机器人系统
2013-04-14 00:57:48
,年均增长31%,预计2023年我国工业机器人市场增速将在20%至25%左右,仍会维持较快的增速。 飞凌嵌入式作为一家专注嵌入式核心控制系统研发与制造的高新技术企业,经过多年的研发与积累,产品已广泛应用
2023-02-24 17:05:21
0引言传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿
2019-07-29 06:09:58
基于DM642的机器人双目视觉系统设计
2021-04-02 07:20:41
` 本帖最后由 forlinx 于 2015-5-20 11:51 编辑
部分案例介绍: 飞凌S3C6410 WINCE教学视频下载地址:百度网盘:http://pan.baidu.com/s/1kTJ0WgZ`
2015-05-20 11:48:45
设计并实现了一种基于S3C6410的智能泵组控制器。该控制器是网络技术与消防系统、远程监控的综合运用,具备采集消防系统中泵组的多信息源、通过网络实时报告状态、自动诊断故障、
2013-09-25 15:09:50 29
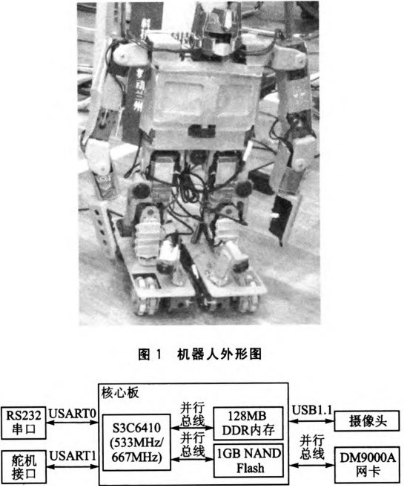
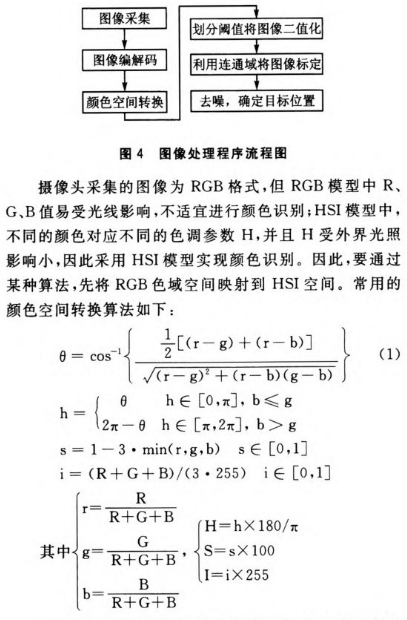
29 在武术擂台技术挑战赛中,机器人要采集目标的位置信息。由于I/O、A/D转换的有效检测距离有限,机器人采用摄像头采集场地上的图像信息,根据目标的颜色进行识别、定位。当检测到目标位置以后控制舵机自主运动向目标靠拢,完成自我介绍、抱绣球等动作。所设计的机器人外形如图1所示。
2021-04-13 15:22:51 1599
1599 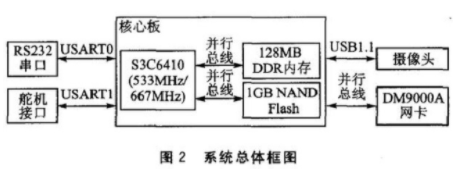
S3C6410(ARM11)嵌入式控制系统液晶显示驱动问题研究(嵌入式开发工程师工作内容)-S3C6410(ARM11)嵌入式控制系统液晶显示驱动问题研究
2021-07-30 14:51:2712
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论