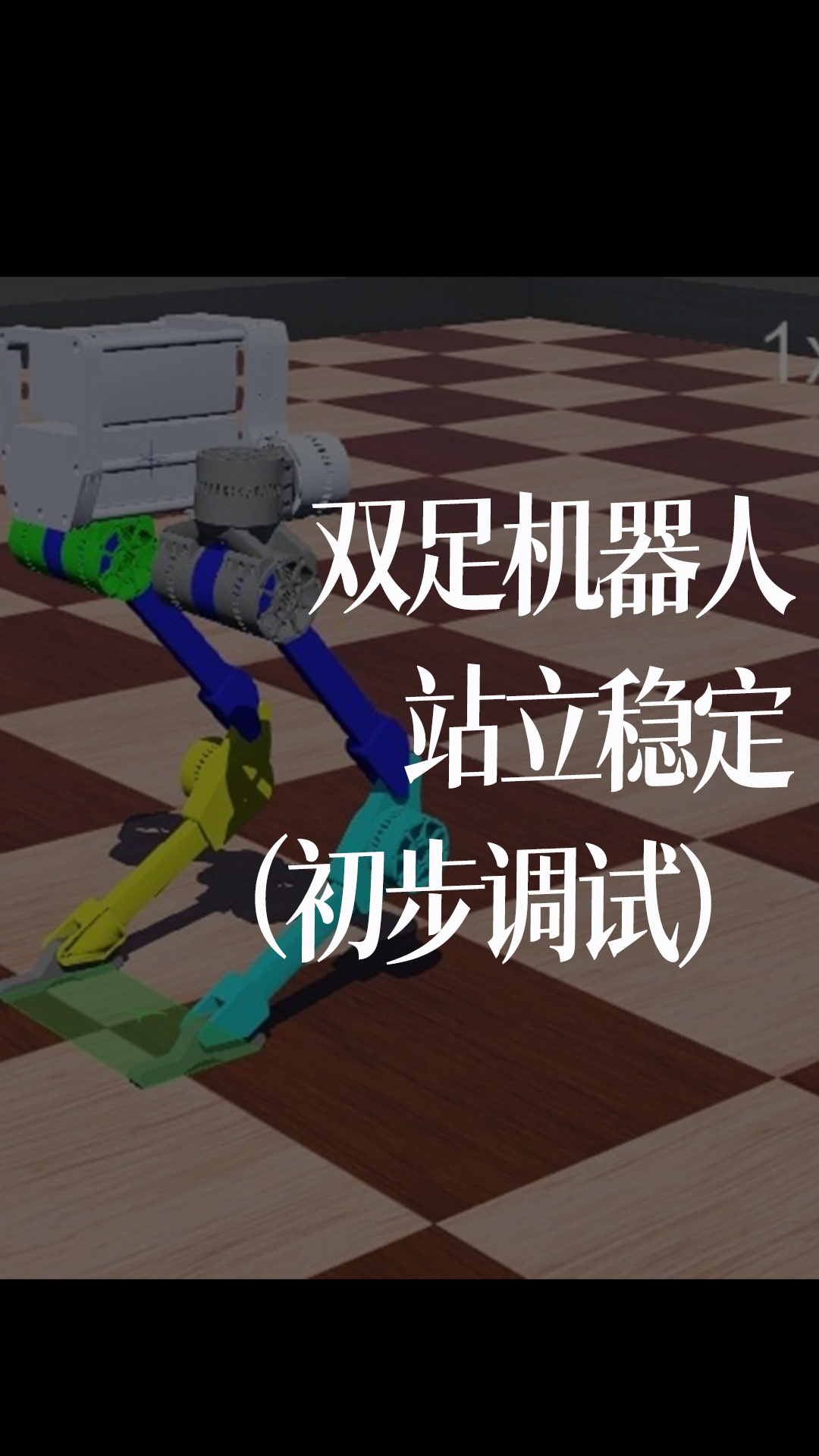
仿人机器人一直是自动控制领域研究的热点。在模仿人类进行迈步行走时,由于仿人机器人的重心经常要处于中心线以外的区域,使得它的身体很难保持站姿平衡,能够稳定地实现双足行走是仿人机器人研究的重点也是难点。
2011-01-23 16:42:37 1989
1989 
机器人元器件 机器人套件
2024-03-14 20:37:45
机器人元器件 机器人套件
2024-03-14 20:37:55
Makeblock Me 机器人元器件 机器人套件
2024-03-14 21:40:36
机器人元器件 机器人套件
2024-03-14 22:03:38
`刚开始做机器人,实物图`
2013-11-25 11:36:20
第三章、双足机器人的硬件结构与框图一、双足机器人的硬件框图图1. 双足机器人结构框图
2013-11-25 11:30:18
介绍ARDUINO的基础知识,介绍扩展版及扩展库,最后介绍双足机器人,遥控机械臂等应用
2016-04-13 23:02:58
本帖最后由 colorsky 于 2016-4-21 14:05 编辑
大家好,我是ColorSky。这是我的双足机器人的开源项目。先发出视频给大家看看,后面陆续会把技术资料上传。机器人鞠躬动作机器人舞蹈1视频机器人跳机器舞视频
2016-04-21 10:51:28
机器人元器件 机器人套件
2024-03-14 21:13:23
云台 机器人套件
2024-03-14 22:33:42
申请理由:NanoPi2在体积和性能上非常适合我的项目,我相信有这开发板,我设计的项目一定如虎添翼项目描述:该机器人控制8个舵机模仿人行走,用红外线检测在前方有碍时,会自动转向
2015-12-02 16:10:52
`(不太会用论坛的发帖来编辑,图片的位置都在最后面,附件里有技术报告)一、项目设计背景及概述双足步行机器人是机器人研究领域的热点,它集机械、电子、计算机、仿生学、自动控制、多传感器及人工智能等多门
2014-01-02 14:31:52
通过安芯一号控制双足机器人腿部关节六个舵机的角度以及转动角速度,使机器人完成行走,翻滚,原地360等动作。机器人在规定区域内向前走,通过传感器找到动作区,完成一系列动作;并且可以通过串口与PC机时时通信,传回机器人的参数
2013-09-28 18:58:35
摘要: 介绍了一种由气动人工肌肉构建的双足机器人关节,该关节利用气动人工肌肉的柔性特性,可以有效控制双足机器人快速行走或跑步时的落地脚冲击问题。详细给出了气动人工肌肉的工作原理以及由其构成
2012-12-06 15:32:52
学校要举办机器人大赛,我们是双足机器人,但是找不到相应的舵机驱动软件,舵机驱动的单片机型号是atmel mega166pa有三个晶振,上面有霸天虎的图案,请各位大神速来帮忙,急求这样一款32路舵机的软件!!
2014-07-10 09:59:03
国内首屈一指的机器人公司招聘算法专家,(导航、视觉、控制算法都有需求)控制算法需要有双足机器人的项目经验。硕士生要求5年以上工作经验,博士生3年以上工作经验即可。无论是企业内的专家,还是在高校搞研究
2020-07-03 18:15:17
双足机器人的起立动作是双足机器人步行之前重要的基本准备动作,本文通过连杆结构分析一种双足机器人的起立方法,主要分析了起立过程的动作规划,分阶段计算出使机器人
2010-01-13 14:52:29 35
35 设计了一款低成本的小型双足 机器人 研究平台。根据仿生学原理确定机器人的比例尺寸,根据机器人的功能要求确定其自由度配置, 选择了合适的材料和驱动元件,实现了一个小型的双
2011-06-07 18:36:31128 2012-05-31 17:01:1077 2014-03-26 10:25:3612 2015-01-22 20:15:08131 仿人机器人一直是自动控制领域研究的热点。在模仿人类进行迈步行走时,由于仿人机器人的重心经常要处于中心线以外的区域,使得它的身体很难保持站姿平衡,能够稳定地实现双足行走是仿人机器人研究的重点也是难点。
2016-09-19 10:53:1947 悟空、悟能双足机器人教程
2016-12-20 22:43:358 两台机器人分别被命名为BALLU(浮力辅助轻量级腿部单元系统)和NABiRoS(非拟人两足机器人系统),虽然它们的造型有些奇特,但是两款机器人都代表了科研机构对于机器人运动新的探索。
2016-11-21 17:36:551105 1.1 双足机器人现状 随着世界第一台工业机器人1962年在美国诞生,机器人已经有了三十多年的发展史。三十多年来,机器人由工业机器人到智能机器人,成为21世纪具有代表性的高新技术之一,其研究涉及
2017-09-16 09:58:2747 由于舵机已经选定,则根据加入垫片以后各宽度设计支架的宽度,并按着人体比例设计大腿、小腿处需要的支架的长度。(如下图标注所示) 根据资料查阅,绝大多数小型双足机器人关节材料均选用铝合金作为材料,整个
2017-11-12 10:40:2520 研究了半被动双足机器人的平面稳定行走控制问题。以最简行走模型为动力学模型,采用沿支撑腿方向的脚后跟脉冲推力作为行走动力源。考虑到系统模型的非线性特征,将基于三角函数扩展的函数链接型人工神经网络控制
2018-01-14 15:49:060 优化算法,使用节点缓存来生成一个引力函数来减少移动代价。最终的算法能够快速地生成初始路径,在规划时间内不断地改进路径且通过使用阈值来确保后面路径都比上次的移动代价更小。双足机器人仿真实验中,改进后的算法与初始的
2018-02-10 11:57:310 针对大型17R加藤一郎结构双足机器人仿人行走控制问题,从仿人机器人的机械结构、控制系统、步态仿真、动力学参数等方面对机器人的影响进行了研究,采用仿生学原理,参考了人体上、下半身比例特点,对机器人
2018-03-02 15:59:301 双足机器人使用的平衡控制策略是「静态步行」(static walking)。这种策略的特点是:机器人步行的过程中,重心(COG,Center of Gravity)的投影始终位于多边形支撑区域
2018-05-28 03:18:0011983 随着人工智能的在近几年发展的火爆,许许多多奇形怪状的机器人也随之诞生了。目前,美国密西根大学机器人科学家杰西格里兹尔研发出了一款双足机器人,它不仅可以直立行走,还可以穿越火场救援,还可以当作搬运工来使用。
2018-08-24 09:41:001940 机器人是一门综合性很强的学科,有着极其广泛的研究和应用领域。机器人技术是综合计算机技术、信息融合技术、机构学、传感技术、仿生科学以及人工智能等多学科而形成的高新技术,它不仅涉及到线性、非线性
2018-10-07 09:03:007782 近日,美国德克萨斯大学奥斯汀分校科克雷尔工程学院的研究人员研发出一款双足机器人“水星(Mercury)”,该机器人能够在被人类意外击中或在没有警告的情况下施加力量时保持平衡。
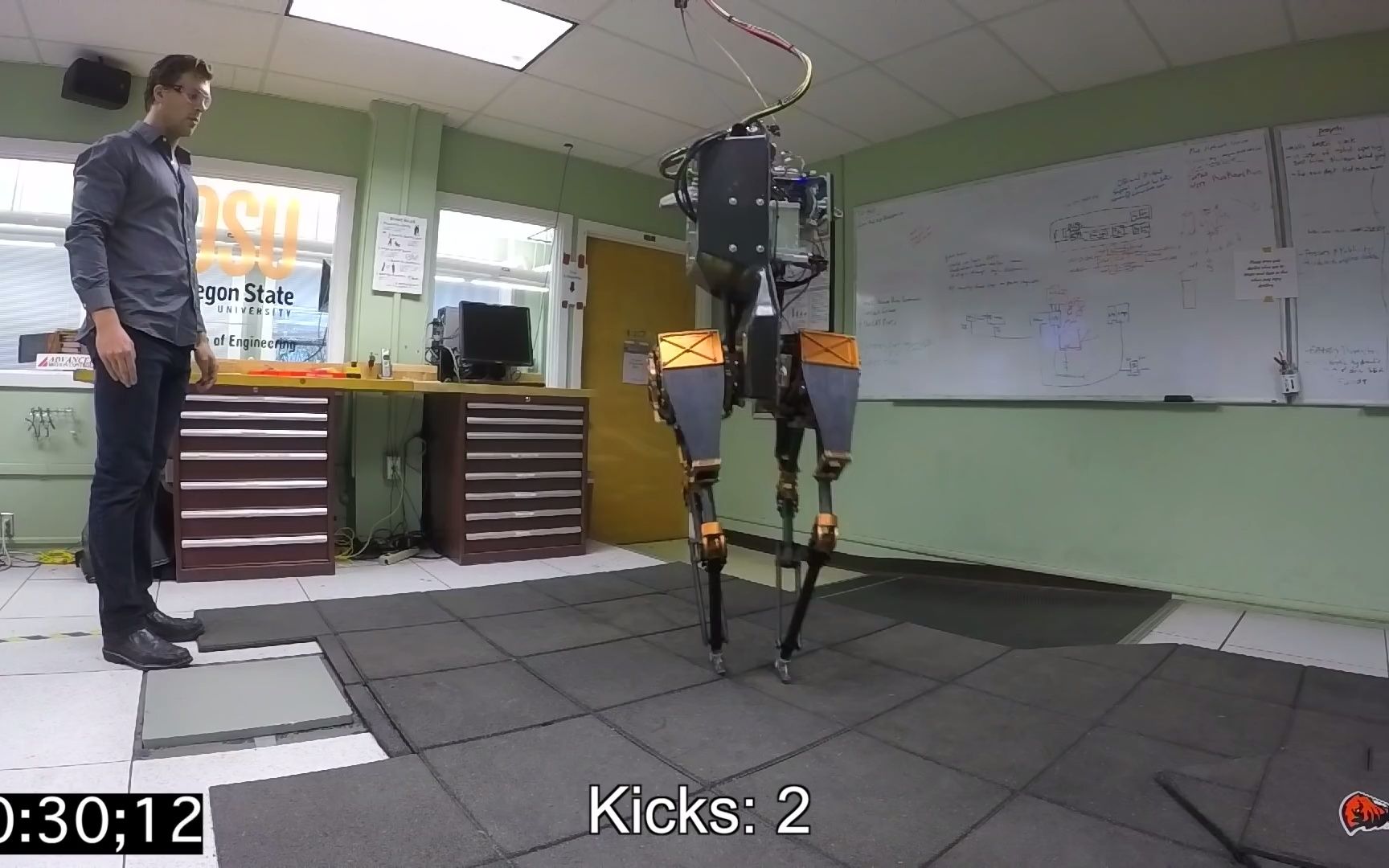
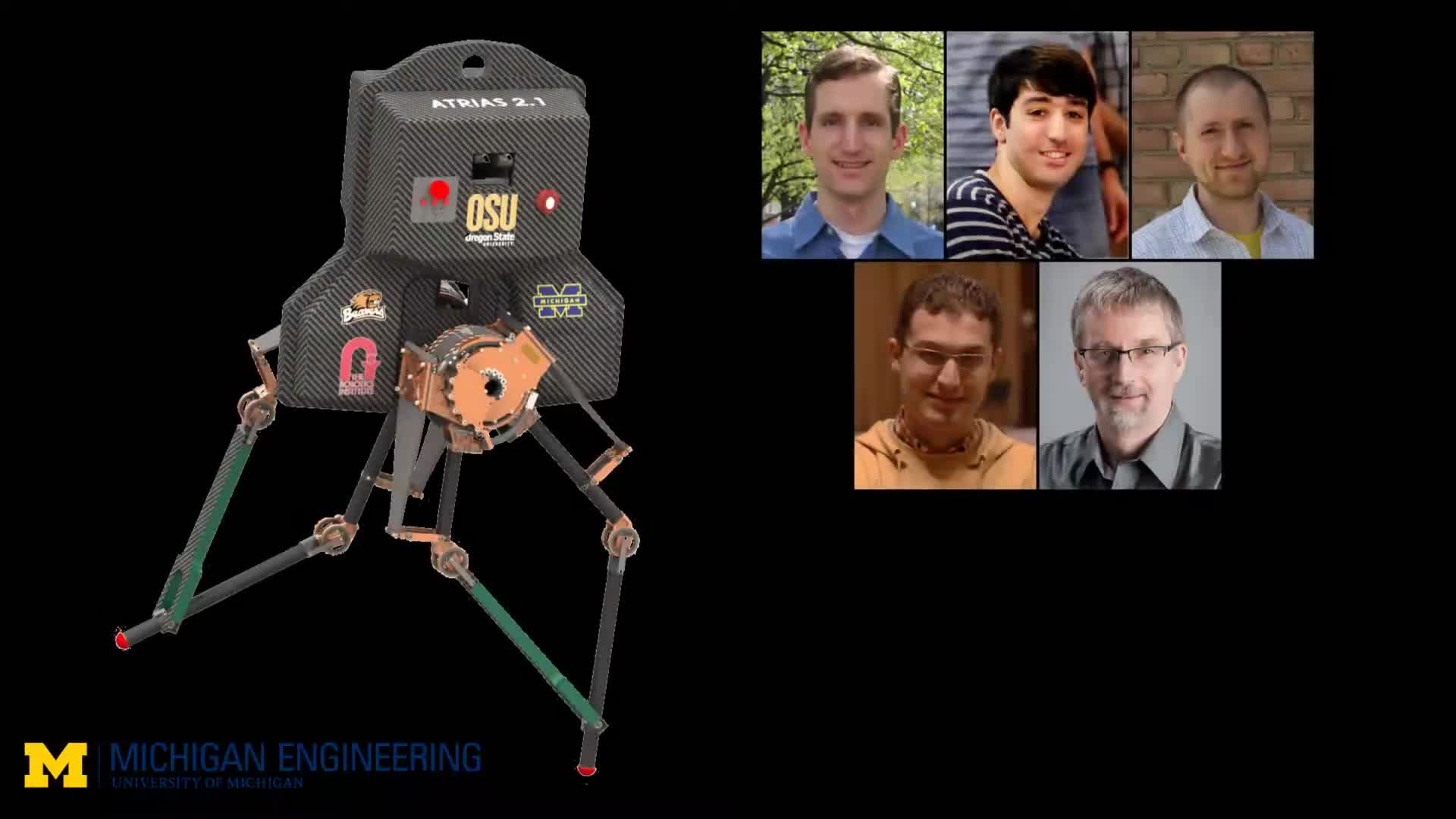
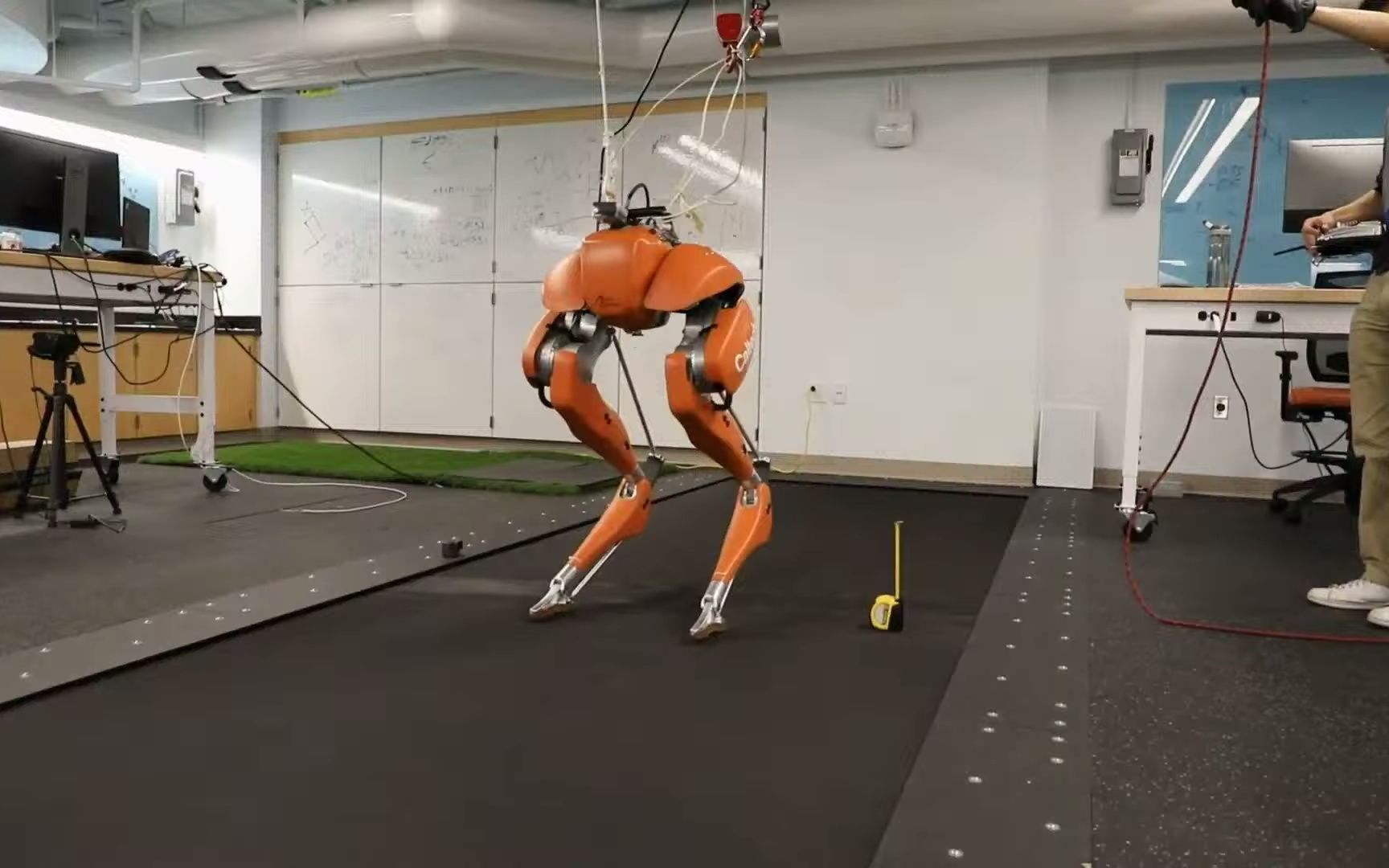
2018-10-16 15:22:134221 Cassie是在另一款双足机器人ATRIAS基础上研发的,但ATRIAS的外形像BBC著名科幻电视剧《神秘博士》(Doctor Who)中的机器人“戴立克”(Dalek),而Cassie更像是《机械战警》中的两足机器人“ED-209”。
2018-11-08 16:46:072438 今年国内几档机器人格斗综艺火爆银屏,让机器人和普通民众的距离一下拉近了很多。但节目上的机器人都是履带式或轮式机器人,很多观众都期待看到类似电影《铁甲钢拳》中的人形机器人登台对战。
2018-11-19 14:26:082599 最近,中国在双足机器人领域也算是捷报频传了,前几天CES展会上优必选的Walker仿人机器人刚刚惊艳亮相,这两天小编我又在中国新闻的网站上看到了另一款来自上海理工大学双足机器人小贝。据介绍这是全球目前唯一可以同时做到“平衡、高效、智能、安全、经济”5个关键特性的大双足机器人
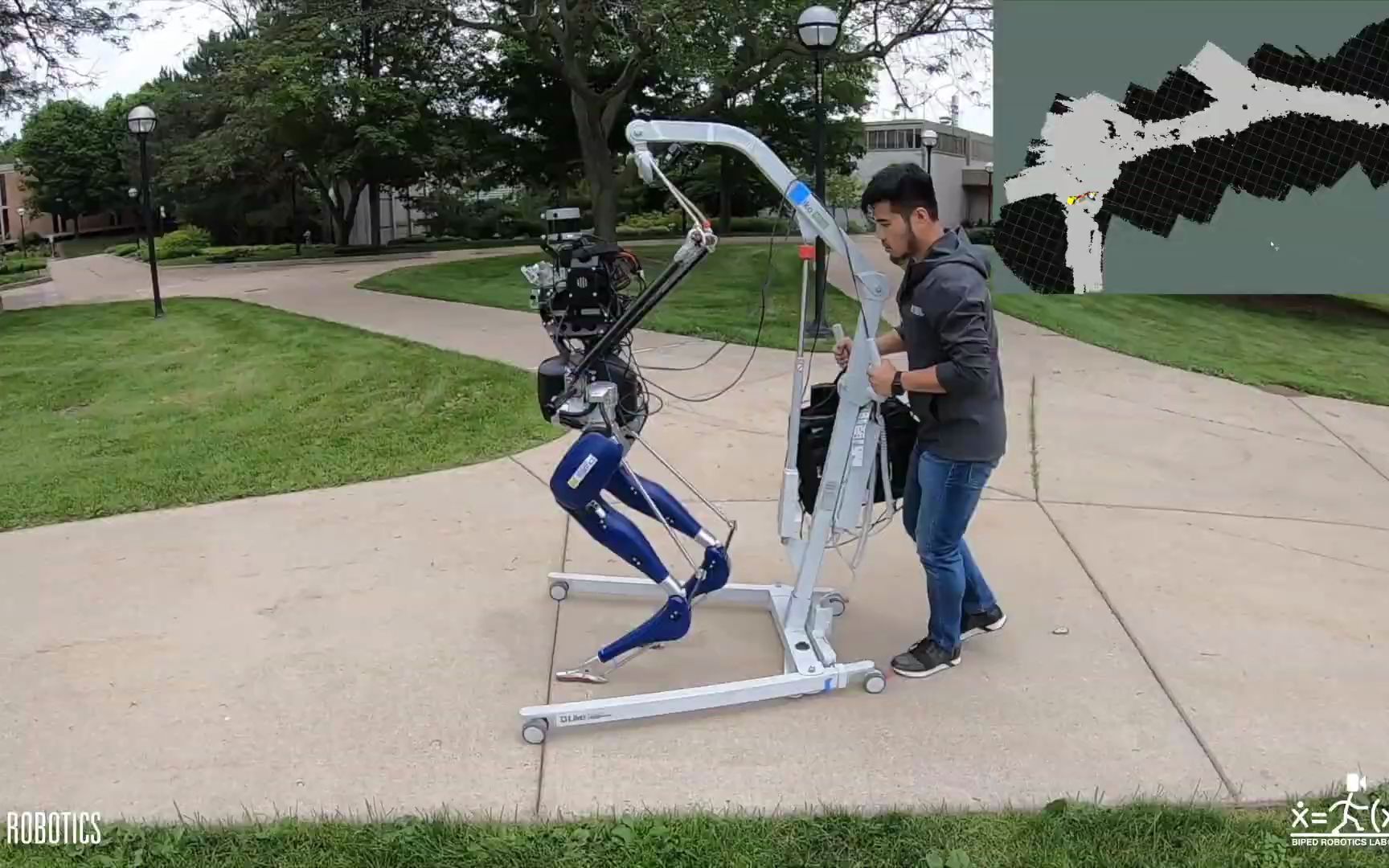
2019-01-13 10:50:107666 双足机器人Cassie,一直以其独特的腿部造型,与轻盈的步态备受机器人界的关注。人们甚至认为这种先进的行走步态和Atlas相比并没有逊色很多,只是空有一双大长腿,总是感觉怪怪的。不过,从Agility Robotics最新公布的消息来看,近日Cassie终于长出了上半身,并取名为Digit。
2019-03-04 11:10:077126 本文档的主要内容详细介绍的是双足机器人STL 3D模型详细资料合集免费下载。
2019-04-29 08:00:0013 供电采用的是 AD/DC 电源适配器,只要插上就不用担心电压的问题。控制板上的 USB 接口是用来下载程序,动作组或者调试用的,只需接到电脑上,打开相应的上位机即可。脱机按键,当按下时双足会运行 100 号动作组(动作号可在程序中修改)。总线接口,接串口
2019-05-31 08:00:006 用无人汽车、无人机送快递这些事情,相信大家都听得多了。但是大家在惊叹、拍手之余,有没有想过这个问题:
无人汽车把快递送到你家门口后?谁把快递从车上拿出来送到你家门口?难道还要在无人汽车上,再配备一个快递员?
近日,福特就对外发布了它们的一款双足送货机器人,旨在解决无人送货最后一里路的问题。
2019-06-01 10:04:583042 人类都很难驾驭的漂移板,却被加州大学伯克利分校的双足机器人Cassie轻松实现,直行、转弯、高速行驶都不在话下。
2019-06-10 09:47:523273 美国航空航天局共制造四台Valkyrie机器人,已经送出去三台。其中两台机器人分别借给美国东北大学和麻省理工学院,而第四台机器人被苏格兰爱丁堡大学收购。通过互惠互利的方式,这些机构的机器人和工程专业学生有机会近距离接触了解前沿的机器人。
2019-08-22 15:59:4610353 在我的情况下,我选择使用电池为机器人供电。我用螺丝和螺母将两个电池座固定在机器人背面。我在每个支架上使用了两个18650系列电池(这样做电压为7.4V)。然后将电池组并联连接以具有更大的电流来驱动
2019-09-04 17:01:258702 本文为一个名叫Besiding的双足机器人建立了完整的力学模型和控制模型,使机器人能在平面上实现稳定的动态行走。并且对模型的可靠性和实用性进行了仿真计算,结果证实了文中模型的合理性和可行性。这个名为Besiding的机器人有10个自由度,从机械学的角度看,其结构能实现基本的步行动作。
2019-12-24 11:23:0022 智能假肢研发过程中,需要残疾人装配假肢进行实验。由于残疾人身体有缺陷,不可能作大量、多样及重复性的实验,这无疑会影响智能假肢的研发进度。异构双足机器人(Biped Robot with Heterogeneous Legs, BRHL)是一种新型的机器人模式,它为研究智能假肢提供了一个新的研究平台。
2019-12-24 16:36:0315 双足步行机器人是真正字面意义上或狭义的“机器人”,其研究和发展代表了机器人学的尖端水平。其中最重要的概念是零力矩点(Zero-MomentPoint,简记ZMP)。本文基于双足步行机器人ZMP控制与动力学模型,取得了以下主要的研究成果: 首先,本文分析了双足机器人动态步行过程的运动学特征。
2019-12-31 16:51:0031 1月6日,据外媒报道,美国创业公司Agility Robotics宣布其双足机器人Digit现已开售,这是一款可以应用在物流行业(包括上下楼梯)的双足机器人产品。
2020-01-06 15:27:421154 1月6日,据外媒报道,美国创业公司Agility Robotics宣布其双足机器人Digit现已开售,这是一款可以应用在物流行业(包括上下楼梯)的双足机器人产品。
2020-01-06 15:29:593697 双足机器人是与人类最接近的一种机器人,其关键技术就是双足步行,最大的特征就是能像人类一样行走,可以完成人类基本的运动功能,尽管目前在仿人机器人领域已经取得了很大的成果,但相对于人类行走,怎样提高在行走过程中步态的稳定性、灵活性、行走速度以及独立性等仍然是个很大的挑战。
2020-01-08 14:35:5829 仿人双足机器人是机器人研究的前沿领域,是多种科技的结合,代表一个国家的技术水平。仿人双足机器人最大的特征就是双足步行,因此它的灵活性很高,可以代替人类完成危险作业。
2020-01-15 10:31:0020 足式机器人的运动具有足与地面非连续接触的特点,这使得它对不平路面环境的适应性较强,可以应用在探险救灾等危险的任务中。与四足及六足机器人相比,双足机器人足部与地面的接触支撑面积较小,使其具有更高
2020-01-17 14:19:5415 双足机器人足底压力的大小与受力位置是其步行运动中的重要参数,但由于地面环境的复杂性,通过机器人本体参数间接地计算足底压力的大小与受力位置是十分困难的,因此研制一种足底压力测量传感系统来检测足底压力的大小与受力位置是解决这个问题的有效手段。
2020-03-03 17:04:3820 6自由度双足机器人是模仿人类的下肢运动制作的机器人。使用了3对舵机,分别模仿人体下肢的臀关节、膝关节、踝关节。
2020-03-12 15:49:0012 年的历史,但是由于它独特的适应性和拟人性,成为了机器人领域的一个重要发展方向。课题旨在设计一种双足人形机器人平台,在此基础上对双足机器人的步行机理进行研究,为进一步设计自主的智能双足人形机器人积累经验。本文首先
2020-03-12 16:15:0015 早已习以为常。表面上看这种双足运动形式很简单,但是研究者研究后发现要想在仿人形机器人身上实现类似于人类那样自由、稳定、快速的行走并不是一件容易的事情。
2020-03-17 16:06:5024 双足机器人的相关研究自仿生机器人出现就同步进行。随着嵌入式芯片的发展,更高效率的控制器的出现使研究人员能够更加灵活的实现双足机器人的控制。相比其他种类的机器人,双足机器人具有运动灵活,适用性强等
2020-03-18 15:19:4728 液压双足机器人由于具有高负载、快速动态响应等优点,逐渐地应用于军事、救灾等复杂危险的任务中。设计一个稳定、高效的运动数据感知获取系统并实现数据可视化显示,对双足机器人的步态规划、运动控制以及运动状态
2020-03-19 16:03:396 对各种行走环境的较强适应能力是双足步行的一个重要性能,这也是双足机器人相对于轮式机器人的优点之一。楼梯是人类生活环境中常见的行走环境,具有爬楼能力是双足机器人应具有的基本功能。本文针对双足机器人
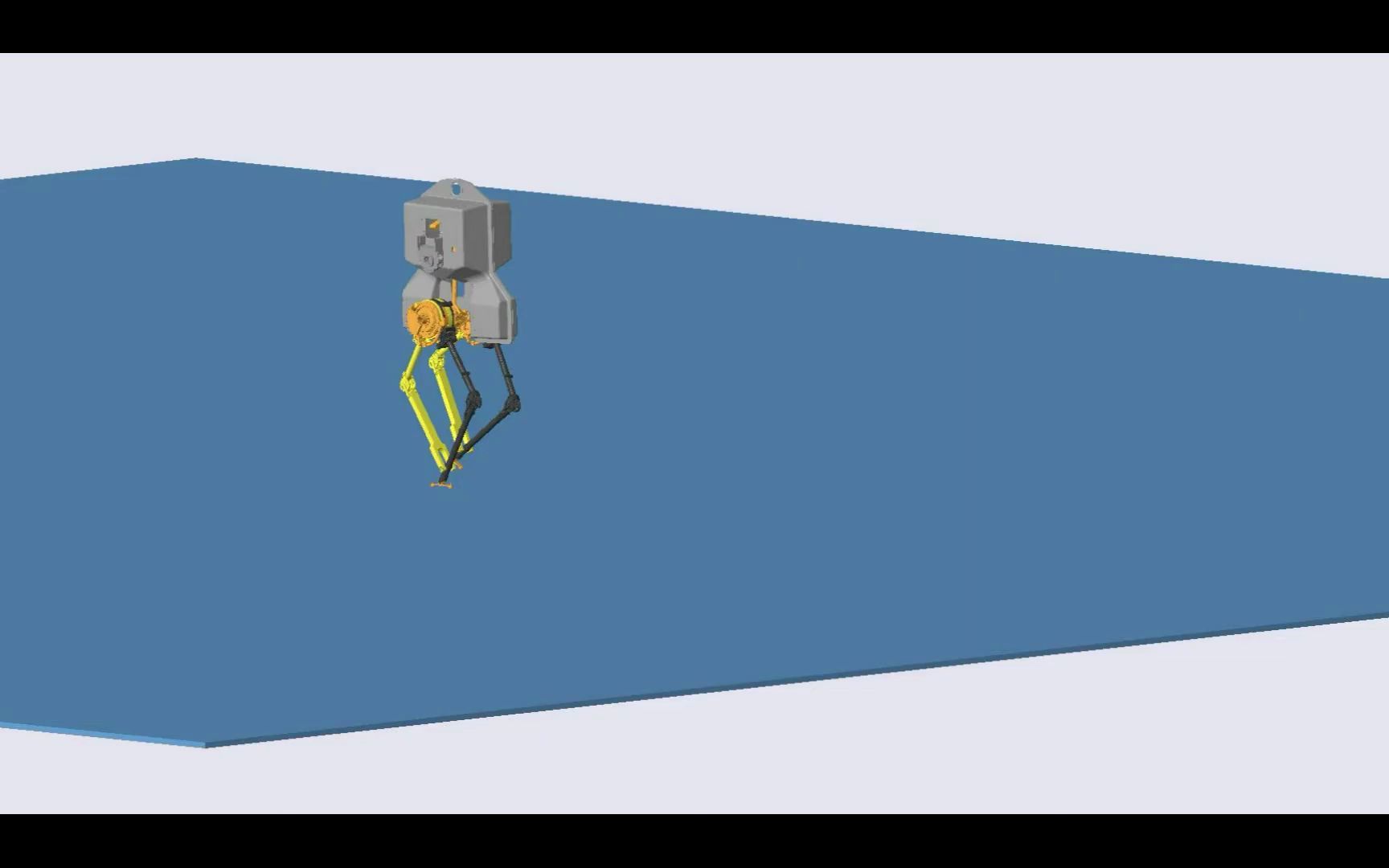
2020-04-07 16:27:3234 在了解了许多双足机器人的下肢结构之后,我注意到了敏捷机器人公司的ATRIAS机器人,它的腿在一条直线上,比串联起来更简单。同时,在分析了成熟的DELTA折叠式机械手工作原理的基础上,提出了DELTA
2020-12-07 09:47:133174 双足机器人的进化再往前一步
2021-03-25 10:44:272992 的 “双足机器人使命”。 今年 36 岁的付春江生于辽宁鞍山,本科毕业于华东理工大学信息学院及认知神经动力学研究所,毕业后东渡日本来到大阪大学读博,主要研究双足行走控制,期间师从日本生体工学权威专家野村泰伸教授。 毕业后,先
2021-06-25 09:19:502796 可以飞可以走的双足机器人 可以飞行又可以行走的双足机器人正式亮相,它拥有一双多关节的腿,用于两足行走,在肩部的螺旋桨推进器使行走更加稳定,同时可以满足跳跃和飞行的功能,可谓是创造出一种新的机器人运动
2022-04-08 10:40:232307 1.舵机齿请勿用手掰(包括装上摆臂后掰摆臂,如果掰摆臂导致牙箱卡死,请自行修复),舵机包括回中均需要使用app
2.在将电池装入主板前务必注意电池的正负极和电池盒的正负极(两者极性一定要一样,接反会烧充电芯片)
3.app下载:jkergo.com/download
4.组装视频:https://v.youku.com/v_show/id_XNDM4MjgyNzAyMA==.html?spm=a2
2022-10-08 14:26:562 电子发烧友网站提供《带有Arduino、乐高和3D打印部件的DIY双足机器人.zip》资料免费下载
2023-06-27 11:44:190 “大圣”面向国内日益升温的双足机器人科研教育与产业探索需求,填补大尺寸仿鸵鸟构型双足机器人产品空白,作为一款高性能与高拓展性的科研教育平台,为用户提供广阔的想象空间。
2023-08-08 17:12:052104 
通过持续优化传感器融合架构,双足机器人的环境适应性将进一步提升,为灾难救援、社会服务等场景提供可靠技术支持。
2025-08-25 15:08:331000 
材质识别MEMS超声波传感器通过声学特性分析,为双足机器人提供了独特的环境感知维度。其在步态适应性、防滑控制及能耗优化方面的作用,已成为复杂环境下稳健行走的关键使能技术。随着MEMS工艺与算法融合的深入,双足机器人的环境适应性将迈向新高度。
2025-08-25 15:12:10807
 电子发烧友App
电子发烧友App























 工商网监
工商网监
评论