 电子发烧友App
电子发烧友App



中科新松有限公司在第一代协作机器人的设计和研发中整合了Elmo的终极多轴运动控制解决方案
中国的机器人公司“新松”全面采用Elmo终极的运动控制解决方案作为第一代协作机器人的最新设计,该设计解决了新一代产品研发中遇到的诸多挑战。
想象一下一个机器人完美地模拟一位太极拳大师的动作,动作精准、平滑、充满力感。
考虑一下在真实的工厂里面一个集成协作机器人与人类员工合作的重要意义,这种协作还要满足严苛和强制的安全约束条件。
采用了Elmo独一无二的、高级的伺服驱动技术,这家在中国机器人和自动化领域领先的公司刚刚完成第一代人机协作的工厂自动化机器人的自主研发。
Elmo提供了超小型、功能强大的基于网络型的伺服驱动器,这些驱动器直接安装在关节上。
这一应用体现了Elmo驱动器在诸多方面的独有优势,如效率、坚固程度、省空间、最少电缆用量、低EMI指数和整个系统可靠性的提升。在设计制造复杂的7轴协作机器人的时候,使用双闭环控制和采用高分辨率绝对值编码器获得最优伺服性能只是众多挑战中的一部分。Elmo在高端机器人领域里的应用实例可以作为客户在研发过程中追求最高多轴运动控制性能时的指导性参考。
摘要
协作机器人被设计用来与人在工厂生产线上紧密协同工作,这一趋势正变得越来越普遍。
在人机协作的环境中,这些机器人被用来去完成高速、高精度的任务。使用相机、力传感器和其他感知元件,这些机器人可以感知人的存在并做出相应动作避免对人的伤害,有的时候机器人的动作会完全停下来。
设计协作机器人通常是用来灵活地处理小的零件,进行一些辅助性工作如安装消费类电子器件,而不是用来完成重载任务如搬运重物,焊接或者喷漆等。
典型的协作机器人的结构都相对小巧和轻便,尽管如此它还是有能力提升相对重的负载,提升重量可达100kg.
除了具有动作灵巧的特点,协作机器人还需要具备感知零件是否准确安装的能力,这一特点在前几代重型工业机器人身上是不可想象的。
老一代传统6关节机器人在移动它们的关节时扭矩比较大,容易对接近的人员造成伤害。
新一代机器人具备一个附加关节或自由度。
与传统的6关节机器人相比,7关节机器人可以以多角度伸展机械臂接近一个特定的原件,因而可以避免触碰人员,继续执行工作任务。
此外,运动学冗余对于在一个特定的空间内操作几个机器人也是很有用处的,因为运动干涉很容易处理。
协作机器人另一个额外特点是可以力矩感知、控制和限制。机器人感知外部极小的力矩变化并做出反应避免碰撞。
在有些情况下,力矩传感器被放置在电机减速箱的后面来直接检测外部力矩的任何快速增加的变化, 而其他时候,机器人需要输出一定扭矩去提升负载和把负载从一个位置移动到另一个位置。
当机器人识别出运动过程中一个异常扭矩增加值,如碰撞,会自动停下来。
碰撞检测和规避机制的另外一个特点是当接触到物体或人员时进行工作模式转换,从非柔性全速模式(循环同步位置模式或循环同步速度模式)转换到力矩模式(循环同步力矩模式)。
柔顺的循环力矩模式使得人员可以用手很轻易地推开机械手臂。机器人可以在触碰物体时自动进入柔顺模式,或者在全速模式下运行。
另一个重要模式是示教模式,在这个模式下,操作人员移动机械手臂到预定位置,Elmo控制器记录下这些位置点以便在正常操作模式下复现设定轨迹。
值得一提的是,在示教过程中,Elmo的方案提供了令人难以置信的敏感性和分辨率。示教过程简单,系统操作人员无需具备超强的编程能力,真正实现无编程运动控制的实现。
Elmo的解决方案
伺服驱动器:
Elmo的超小体积、性能强大的伺服驱动器被用来完成这项挑战任务。
伺服驱动器直接安装在机器人关节上,保证了机器人尺寸小巧结构紧凑。
两个大功率的超小体积驱动器Gold SOLO GUITAR用来驱动两个基础关节电机,以支撑整个机械结构的运转。
这款驱动器的持续50Amp和峰值100Amp的电流输出能力足以驱动电机在高速、高加速度和高减速度的状况下运行。
此外,五个迷你型Gold SOLO WHISTLE驱动器可以输出持续20Amp和峰值40Amp电流,用以驱动另外五个关节。
系统里的每个驱动器既可以在高速、高加减速情况下运行,又可以在低速情况下运行,并且都能保证极高的精度和准确性。用同一款驱动器实现反差如此巨大的高低速操作是得益于驱动器1:2000的动态电流范围和非常宽的带宽响应。
一个驱动器物理尺寸足够小到能直接安装在机器人关节上,几乎是这种复杂机器人项目的唯一选择。
把驱动器放置在离编码器反馈足够近的地方可以节省电缆,减少干扰影响,获得比较低的EMI和RFI指标,系统稳定性大大提升。
另一个让驱动器更易集成进关节的特性是驱动器固有的坚固性,可以承受关节内极高的机械加减速度。
Elmo应用工具
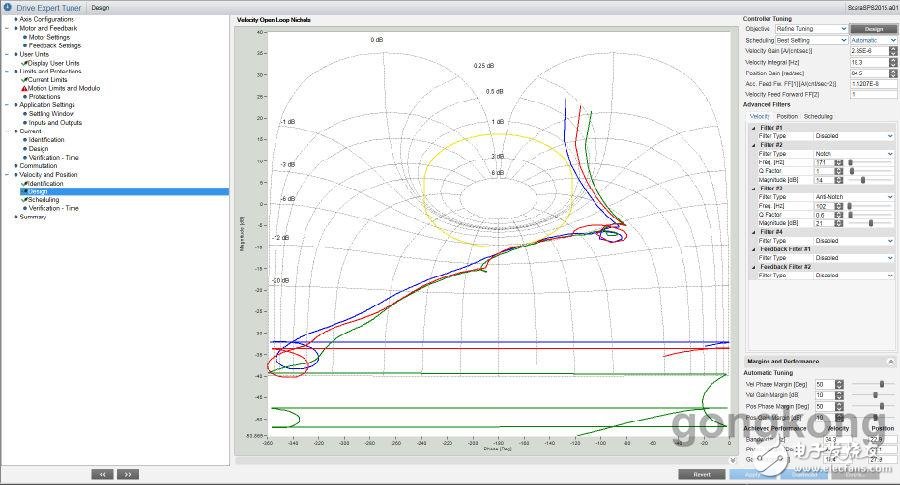
Elmo高级且易用的配置工具,EASII软件,可以帮助客户调试网络中的每个轴,达到最优的伺服性能。
系统辨识、合适的控制器设计、使用高阶滤波器克服机械系统缺陷等可以提升系统获得最优伺服性能,这仅仅是这个工具的一部分功能。
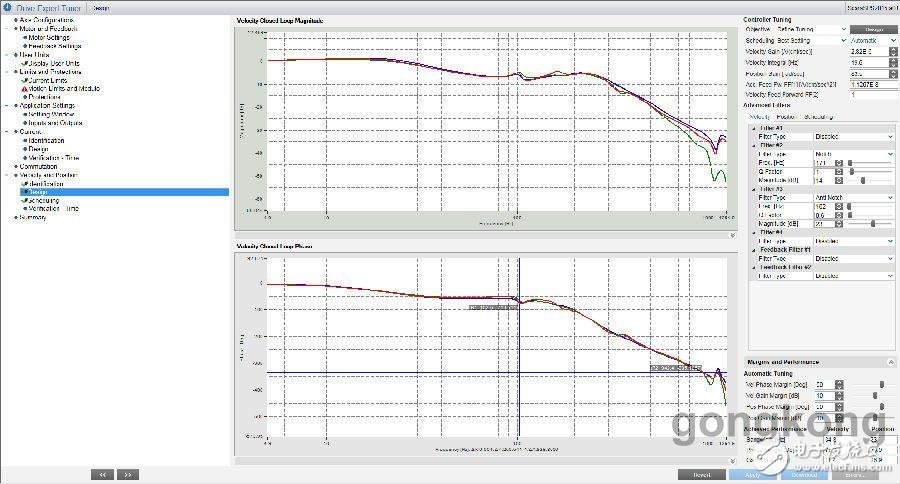
此外,使用带特殊位置分组增益的简单、高级的系统辨识方法进行多轴系统辨识可以消除不同轴之间的交叉影响。在这个应用中还用到了更多其他具有特色的功能,最终目标是获得最高带宽、最快的响应时间,同时保证机器人运行稳定、平滑,并且具有很高的裕度。
系统里的每个轴采用双闭环控制算法来提高减速机后端关节末端位置的定位精度。
增量式编码器和Hall元件作为速度环反馈置于减速箱前端,19位高分辨率绝对值编码器作为负载末端位置反馈,这样的用法只是Elmo金线系列驱动器的一个标准用法。
双闭环控制算法可以提升伺服电机性能达到最优状态。
Elmo提供PCB插针安装式驱动器,也可以同时配套提供接口转接板,这允许客户通过转接板连接EtherCAT总线、IO和编码器反馈。
白金版Maestro,终极多轴运动控制器
控制整个系统的是Elmo高级的多轴运动控制器P-MAS,通过实时串行EtherCAT总线在250us内同步16个轴(最短可现实100us内同步8个轴)。
Elmo的高级多轴运动控制器P-MAS可以提供内容丰富的机器人运动学功能,例如Cartesian, SCARA,3-Link,Delta等等,使用这些功能就可以很容易应对机器人应用的挑战。
内置的运动学功能支持MCS(机器坐标系)和PCS(产品坐标系),在翻转、传送和其他外部装置中可以实现完全同步。
此外,P-MAS为客户应用预留了一个实时内核。这部分内核允许机器人开发用户编写自己特殊的运动学转换方程,这一功能使得P-MAS支持任何高端的机器人,几乎不受类型限制,因为客户可以针对应用编写自己的运动学功能。
对于这种在250us总线循环时间内完成机器人运动学正逆解计算的应用必须使用基于四核强大处理器的多轴运动控制器P-MAS。
运动学方程解算是在用户实时应用程中进行的,计算系统中所有轴的目标位置、目标速度或扭矩并在每个EtherCAT总线周期输出。
DS-402协议中的循环同步模式是Elmo的EtherCAT版本驱动器的内置标准操作模式。
在P-MAS和上位主机、PLC或HMI之间多种标准和专门的通讯协议使得P-MAS与第三方设备通讯变得十分容易,如触摸屏、手操板、PLC和PC机等。
与上位主机的通讯能力如Ethernet, TCP/IP和UDP协议,快速的二进制协议如MODBUS和Ethernet/IP, 使得与上位主机之间的通讯变得快速而有效。
机器人工作在两种模式,第一种是示教模式,第二种是工作模式。
在示教模式下,操作人员可以沿着需要的工作路径移动机器人手臂到一些关键位置点上,在移动过程中多轴运动控制器记录下相关的位置点以便在工作模式下复现工作路径。
在示教模式下伺服驱动器是运行在同步循环力矩模式。除了目标力矩命令外,多轴运动控制器还会输出额外的补偿力矩去克服重力、机器人动力学等阻抗因素,维持拖拽过程平滑。
这种复杂机器人解决方案的亮点之一就是整个示教过程对一个不会编程的操作人员来说十分简单,大部分工作不需要具有编程经验或技巧就可以完成。
第二种操作模式就是正常工作模式,在这种模式下多轴控制器根据机器人的运动学模型来计算七个轴的目标位置和速度(DH矩阵逆解),如果必要的话,基于机器人动力学模型的补偿力矩会被加到总的输出力矩中。伺服驱动器是工作在循环同步位置模式或者循环同步速度模式,接收目标位置/速度命令和力矩偏置命令。
方案亮点
•无可匹敌的伺服驱动器性能
•可以做到250us内16个轴完全同步和坐标运动
•小体积、高功率的伺服驱动器直接安装在关节上
•超大动态电流范围适于高速和高精度
•双闭环控制性能
•支持多种反馈(增量式编码器和绝对值编码器)
•使用性能强大的多轴控制器实现同步和机器人运动学计算
•快速、实时的EtherCAT总线网络
•最优的伺服驱动器性能—高带宽带来的就是快速的响应时间
•功能强大的EASII软件使机器人的配置和实施变得很容易
•最高效率和极致的稳定性
•坚固耐用,驱动器可以安装在任何位置
•RFI很低的EMI和RFI指数
总结
对于中科新松有限公司最新一代科技产品协作机器人来说,Elmo的智能、小体积和简单易用的伺服和运动控制解决方案大大提升了其产品的性能,并且增强了产品的功能性。









 工商网监
工商网监
评论