今年以来,由中科院沈阳自动化所自主研制的深海自主水下机器人“潜龙二号”和自主遥控混合式水下机器人“海斗”号先后成功完成试验性应用,前者取得我国大洋热液探测的重大突破,后者在我国首次万米深渊科考航次中成功应用,最大下潜深度10767米。
2016-12-22 11:06:43 679
679 为了提高水下机器人的感知能力,基于仿生原理的触须传感器被研究人员开发并应用。侧线是鱼的一个感应器官,可以感知周围水流的变化,从而帮助鱼在黑暗条件下感知周围的环境。
2022-04-21 15:01:488765 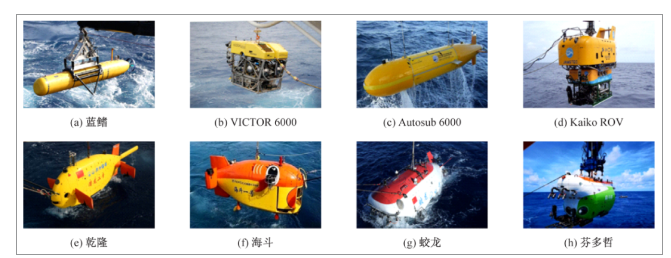
机器人等特种机器人:场地机器人、专业清洁机器人、医用机器人、物流机器人、检查维护保养机器人、建筑机器人、水下机器人、国防营救及安全应用机器人等核心部件:控制器、减速机、伺服电机、检测设备、焊割设备、喷涂
2016-10-10 16:30:56
,就能依靠经验,学习到很多更好的作业方法,并且熟练掌握。 机器人传感器可分为机器人内部传感器和机器人外部传感器两种。机器人内部传感器的功能是测量运动学和动力学参数,其提供信息的目的是控制机器人按规定
2018-01-03 17:09:03
(External Sensons)。下面将以此为主,结合机器人传感器其它分类方法进行阐述。 机器人产业近年来发展很快,2012年全球产量为16万台,欧、美、日等工业发达国家机器人市场已比较成熟,已处于平增长阶段
2018-11-08 15:55:32
本帖最后由 eehome 于 2013-1-5 10:05 编辑
水下机器人水面控制台通常基于计算机平台,体积较为庞大,不便于移动。但在某些情况下,如水下机器人水面回收或者水面测试载体各种航行
2011-03-08 14:21:34
有幸获得了省赛一等奖,实属来之不易。中途也遇到了很多的困难,在赛后稍微做一下总结,也算分享一些经验提示:以下是本篇文章正文内容,仅涉及到设计部分一、水下机器人管道巡检组内容简述水下管道巡检组是做一个水下机器人,需要实现巡检管道、识别吸附物、清除吸附物和回收吸附物等功能。二、功能实现树莓派+ard
2022-01-11 06:51:45
传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿人机器人
2019-09-18 06:17:46
需求可以完美契合。有缆水下机器人电源构架与系留无人机系统类似,有缆水下机器人系统分为水面部分和水下部分,两部分通过线缆连接,水面部分一般是船载或地面电源和控制部分,水下部分一般由传感器,机身等构成。水下机器人
2019-08-16 11:15:31
无论是传统的工业机器人系统,还是当今最先进的协作机器人(Cobot),它们都要依靠可生成大量高度可变数据的传感器。这些数据有助于构建更佳的机器学习(ML)和人工智能(AI)模型。而机器人依靠这些模型变得“自主”,可在动态的现实环境中做出实时决策和导航。
2020-08-05 07:08:21
项目名称:水下智能机器人试用计划:1.对BeagleBone Black硬件资源进行测评2.通过烧写ubuntu系统 结合硬件资源进行软硬件测试3.基于ubuntu,stm32,电力猫三个硬件构建水下机器人4.项目开阵。按时间完成计划5项目调试 资源分享。预计成果:发表帖子分享项目开展过程,结果,经验。
2017-07-04 16:55:05
摘要:本文主要介绍如何根据国外开源项目(OpenROV)开始自己DIY一个水下机器人。关键词:水下机器人 DIY背景水下无人机在近两年大热,经常出现在各种众筹平台,在大学生的挑战杯等比赛上也能见到其
2017-07-25 20:23:28
项目名称:渔业卫士-基于图像识别的多自由度水下机器人试用计划:1、申请理由希望早日接触、应用国产的鸿蒙系统。2、项目名称渔业卫士-基于图像识别的多自由度水下机器人3、计划(1)约三个月时间,应用该款
2020-09-25 10:11:50
项目名称:水下机器人探测项目试用计划:1、我是广东海洋大学嵌入式工作组的成员 丘子枫,现在是大三的学生。从大一开始就从单片机开始慢慢接触嵌入式的东西。参与设计的了我校首个水下机器人,并且从大二的时候
2017-06-01 09:45:11
分享一下水下机器人的电机控制(针对的是直流无刷电机+双向电调的模式)。其实一句话就说明白了,频率50hz的方波,1.5毫秒占空比是初始化;假如1~1.5毫秒正转,1.5~2毫秒反转,反之亦然。1.5
2021-09-16 08:43:15
蒋海林,贾哲,张国良,张维平(第二炮兵工程学院陕西 西安710025)0引言传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器
2019-06-21 07:04:37
智能水下机器人在海洋石油开发、矿物资源开采、打捞和军事等方面都有广泛的应用前景[1][2][3]。水下机器人已经开始取代过去由载人潜器和潜水员所承担的工作,尤其是在大深度和危险区域发挥了更大的优势。
2019-10-29 07:22:16
系统的帮助下,自主完成人类指定的工作,如果传感器的精度差,会直接影响机器人的作业质量,如果传感器不稳定或者可靠性不高,很容易导致智能机器人出现故障,轻者导致工作不能正常运行,严重者还会造成严重的事故
2015-01-20 14:56:46
软件构建微小的控制系统,在机器人的末梢或手臂部分安装必要的传感器,来控制机器人的手臂运动,监测工作中的异常情况,同时也保证了安全生产的进行。而在当下机器人传感器系统设计中,下一步的趋势将会是借助传感器
2015-02-04 16:35:49
控制和通信 IC 的发展在实现下一代的机器人中起到重要作用。然而,这些复杂的现代机器人的核心是许多新的、小型化和低成本的传感技术的出现与融合。对实现下一代机器人至关重要的几项关键传感器技术包括磁性位置传感器、存在传感器、手势传感器、力矩传感器、环境传感器和电源管理传感器。
2019-07-31 07:46:31
瑞士联邦理工学院 Pascal Buholzer 和他的学生设计的Sepios水下仿生机器人,解决螺旋桨推进器的水草缠绕和噪音问题。
2015-01-13 15:52:06
公司的酷卡机器人有一个调零的程序,就是把机器人移动靠近到防护围栏上的一个传感器,直到触发传感器动作。在机器人发生碰撞后就提示要求调零,但一直没搞明白这样做目的是什么,希望知道的朋友指点一下。
2015-01-14 14:35:30
0引言传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿
2019-07-29 06:09:58
水下避障传感器详细参数解答请联系曾工18668003652
2022-01-25 15:40:11
针对自治水下机器人(AUV)所处的真实海洋环境,通过分析长距离航行时AUV局部规划必须考虑的各种因素和可能产生的影响,设计一种局部规划器的结构,提出基于模糊逻辑的解决方案
2009-04-18 09:50:42 31
31 本文研究设计了一种基于PC 机与单片机的水下作业控制系统。本控制系统采用的是PC 机与单片机串行通讯的方式,来实现对自动工具库的可视化控制。在对本计算机控制系统进行介
2009-07-30 11:37:5312 水下作业系统是运动学冗余系统,本文将模糊推理方法融入基于任务优先运动学控制算法,对系统载体与机械手进行协调运动分配,同时对系统多个任务进行优化。通过带有3自由
2009-12-14 16:25:4112 设计安装自动平衡装置作为物理仿真系统对水下机器人姿态控制进行实验研究,给出了实验系统的结构。结合具体系统设计了H∞/H2 鲁棒控制器,分析了调节设计参数对系统性能
2009-12-28 11:17:2817 本文介绍了一种基于单片机与触摸屏的水下机器人便携式遥控单元设计方法,主要包括便携式遥控单元硬件结构、单片机与触摸屏之间的通信以及遥控单元软件设计等内容。通过该便
2010-02-23 13:53:4720 提出一种分层路径规划算法来解决大范围海洋环境下的智能水下机器人(AUV)的全局路径规划问题。该算法将
2010-03-03 14:52:0118 水下机器人是建设海洋强国、捍卫国家安全和实现可持续发展必需的利器。我国水下机器人研制经过多年追赶,部分技术已与国外看齐,亟待进一步整合产业链条资源,积极推动水下机器人成果转化,应对新一代全海深、全海域、组合化水下机器人研发。
2016-12-22 09:40:121167 基于嗅觉的水下机器人化学羽状物追踪定位方法_邓薇
2017-01-08 13:38:530 自治水下机器人自适应滑膜控制_吴宝举
2017-01-30 23:17:315 依靠NI myRIO控制的4块鳍,敏捷的水下机器人Sepios能够向6个方向移动 这个方案将向您演示一个采用NI MyRIO控制的4鳍水下机器人方案,这个由学生制造的Sepios水下机器人依靠
2017-02-08 20:24:38475 深海交汇拍摄,不同类型装备协同作业,同时对南海一冷泉区进行了精细调查,取得了大量生物样品。 亮点一:水下机器人深海约会 在1000多米深的黑暗海底,一个根据预编程自主航行的机器人穿梭而过,能用另外一个机器人在海底准确找
2017-09-20 10:13:541 我国自主研发的自治式水下机器人探索号,24日在南海北部开展首次试验性应用,预计水下作业时间20小时。24日上午8时,在科学号远洋综合科考船的后甲板上,科考队员做好了探索号下潜的所有准备工作。探索
2017-09-20 11:31:1714 无人机来源于航模,航模有很多开源的项目,而水下机器人开源的项目非常少,如果要从事水下机器人的创业,很多设计都需要从零开始。
2017-09-22 07:29:2614016 随着人工智能大潮的逐渐渗透,近年来各个国家对海洋资源越来越看重,纷纷加大了水下机器人的研发投入。美国、日本、法国作为最早一批研制水下机器人的国家,如今早已掌握了先进的水下机器人技术。
2017-09-27 15:10:42876 自主式水下机器人(Autonomous Underwater Vehicles,AUV)代表了未来水下机器人技术的发展方向,是当前世界各国研究工作的热点。对AUV的实时监测和控制是AUV能否安全高效
2017-10-25 11:46:351 针对传统的机器人控制器设计容易受到水流冲击压力不定的因素干扰,导致控制器稳定性差、工作效率低下的问题。提出一种6 自由度下的水下机器人控制器抗干扰设计方法,通过水下机器人 自由度空间动力学方程,及其
2017-10-28 13:04:499 水下结构检测与清污机器人是有缆遥控水下机器人(Remotely Operated Vehicle.ROV)的一种,它具有机动灵活、动力充沛、作业深度大、续航力强和环境适应性强等特点,被广泛应用于水下
2017-11-10 10:26:594 以主推加舵控制的小型自治水下机器人为研究对象,建立了水下机器人的数学模型并进行了分析。根据机器人结构的特点,对模型进行了必要的简化。设计了机器人的运动控制系统。以成功研制的无缆自治水下机器人(AUV
2017-11-12 09:43:1710 ,在短短2年的时间内,完成了水下机器人Poseidon I的研发到量产。而今研发水下机器人的公司就开始如雨后春笋般多了起来,市场印证了黄俊平的行业判断,也侧面印证了水下机器人市场大有可为。
2017-11-30 15:57:206564 为了实现对水下机器人周围环境的监测,提出了一种基于PC104与C8051F120的水下机器人环境监测系统设计方案,并完成系统的软硬件设计。
2018-03-21 09:23:002013 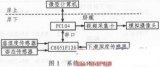
针对水下机器人进行水下检测时的实时控制和监控问题,对水下机器人的推进器结构、运动方式、通讯方式、机体状态显示方式、运动控制方法等方面进行了研究,对水下机器人实现高效水下检测所需的各功能需求进行了归纳
2018-03-14 15:36:246 随着海洋资源的不断开发,水下机器人作为一种先进的探索被不断应用到该领域,得到了快速的发展以及高度的重视。
2018-07-25 17:11:008306 开架式通用水下机器人开源搭建手册
2018-05-04 17:20:3311 从“上天”到“下海”,水下机器人作为机器人新形态的出现也为人工智能的发展拓宽了领域,而作为发展的新方向,其也应“大有可为”。
2018-05-26 10:35:0020912 Martitme 公司和国家石油公司联合与挪威科技大学合作,研发出了一种 水下蛇形机器人 ,这款机器人的目的就是取代笨重的船只和设备进行水下清理工作。
2018-05-22 00:23:005181 反观当下,虽然消费级的水下智能机器人已开始在国内上开始流行,并主要用于潜水运动、海钓捕鱼、水下摄影,但国内品牌的水下机器人产品却始终不能在海内外的中高端民用市场获得用户青睐。毕竟,其应用空间在危险的海洋,无论是使用环境还是使用寿命都必须承受严酷的考验。
2018-05-23 18:24:144574 水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。由于水下环境恶劣危险,人的潜水深度有限,所以水下机器人成为开发海洋的重要工具。水下机器人都有哪些鲜为人知的“十八般武艺”?一起来看看吧。
2018-07-07 09:28:3014474 近日,南方电网调峰调频发电有限公司水下机器人项目完成最终验收,该机器人能在水下隧洞远距离航行检测,可排查水工设施安全隐患,为后续水下作业提供支撑,大大降低电厂安全检查成本,保障了电网的安全可靠运行。
2018-08-07 11:04:117297 水下环境复杂多变,性能优良、操作灵活的水下机器人是当今进行深海作业必需的设备。此次代表中国参赛的哈尔滨工程大学E唯协会的成员,带着水下机器人第八次参赛。他们从2011年开始参加比赛,2012年获得第四名,2013年第五名,2016年第六名,2017年第四名。
2018-08-08 15:12:534438 8月6日,第21届国际水下机器人竞赛在美国圣迭戈落幕,哈尔滨工程大学E唯代表队夺得冠军。这是我国高校首次在世界顶级水下机器人大赛中夺冠。
2018-08-08 16:43:405215 潜水侠针对这一市场,推出了便携式水下机器人产品Nemo,以有缆的方式在水下行驶,船上或陆地的人可以通过移动设备控制Nemo的运动、拍摄照片视频,也可以带上VR设备,通过头部的运动直接控制Nemo运动。Nemo下潜深度可达100米,运行续航时间3小时。
2018-08-09 09:37:002809 随着技术的逐渐成熟和消费水平的提升,人们对水下领域的探测需求持续持续增长,民用水下机器人市场将持续稳定增长。数据显示,2020年中国民用水下机器人市场规模将达到580.65亿元,其中资源勘查类水下机器人
2018-08-16 14:34:5211082 水下机器人的工作环境是不同的水域,水下状况多变,对机器人的技术要求提出了更高的挑战。水下机器人制造技术密集性高,主要包括仿真、智能控制、水下目标探测与识别、水下定位、通信、能源系统六大技术。与发达国家相比,我国水下机器人制造的一些关键材料与技术研究领域仍有一定的差距,还需不断发展突破。
2018-09-08 09:44:131395 据报道,当涉及到水下机器人时,基本上有两种类型 - 在自行巡航时收集数据的自主水下航行器(AUV)以及可以在实时被控制并同时执行任务的遥控水下机器人 (ROV)。总部位于德克萨斯州的Houston Mechatronics公司的Aquanaut将上述两种产品相结合。
2018-09-17 15:02:223145 据报道,全球首款五驱微型水下机器人“鲛GLADIUS MINI”19日在2018云栖大会上首发。它拥有模型船的造型,能深潜至水下100米,即时拍摄并传送照片至手机上。
2018-09-20 09:41:451770 日前,由我国自主研制的“海星6000”有缆遥控水下机器人完成首次科考应用任务,并在多个海域获取了环境样品和数据资料。期间,“海星6000”最大下潜深度突破6000米,再创我国有缆遥控水下机器人(ROV)的最大下潜深度纪录。
2018-11-01 09:43:582073 唐蕃古道,利用智能水下机器人对苦拔海(豆错)、河厉桥(龙羊峡)水质信息探测与采集,对三江源区水道与路网的变迁特征进行研究,这是国内首次利用智能水下机器人对高原地区水域进行水质信息探测与采集。
2018-11-19 14:36:321494 我国是海产养殖大国,但水下作业一直是难题。如鲍、海参、扇贝、海螺、海胆等底播海产品,从播种、养护到采捕都需要人力,工具也比较简单,不仅劳动强度大,生产效率低,而且还有较高的安全风险。而水下机器人的发展有望解决这些问题。
2019-01-25 17:22:214299 本文结合水下机器人(ROV)在阳江核电厂取水口海生物监测中的应用实例,介绍了ROV的原理、系统组成、主要功能、作业流程,总结出国产水下机器人( ROV)用于核电厂冷源取水口海生物监测的优势,同时展望水下机器人在我国核电行业应用的广阔前景。
2019-05-08 09:38:425969 随着人工智能的快速发展,在恶劣的工作环境下,用机器人替代人工的做法越来越广泛,在2019数博会人工智能全球大赛武汉分赛区比赛中脱颖而出的大智若鱼——子母型多功能水下机器人便是其中之一。
2019-05-16 10:32:11962 近日,RE2 Robotics公司宣布已获得300万美元的资金,用于开发灵巧的水下机器手。
2019-05-28 15:43:403762 利用人工智能帮助水下机器人适应各种极端环境,以完成勘察水中建筑安全状况的任务。
2019-07-11 15:52:18913 水下机器人是高技术的集成,虽然水下机器人本体的各种材料及相关技术已基本成熟,但随着水下机器人向大范围、大深度、长续航、多功能的发展,一些关键技术还需研究解决
2019-07-17 16:15:2512531 中车株洲所旗下的SMD公司,在英国阿伯丁举行的SPE Offshore Europe展会上,发布了一款具有超强作业能力、绿色环保工作级电驱动水下机器人(简称ROV)——QUANTUM/EV。
2019-09-05 09:36:26716 水下滑翔机水下导航定位精度的提高对于滑翔机完成海洋环境观测、资源探测、海洋目标识别与定位等任务至关重要。
2020-01-29 17:04:002290 由于水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。20世纪后半叶诞生的水下机器人,在机器人学领域属于服务机器人中的特种机器人类别。
2019-12-26 10:36:552414 水下机器人是一种技术密集性高、系统性强的工程,随着应用领域的不断扩大,水下机器人会向着体积更小、兼容性更强、智能化程度更高的方向发展。
2020-01-24 16:59:00752 水下机器人在海洋开发、勘探水下环境以及未来水下战争中发挥着重要的作用,但是它的续航能力有限,因此在海底建设供电系统是十分有必要的。
2020-02-04 16:08:052294 韩国媒体称,日前,韩国最大的集装箱航运公司现代商船(HMM)宣布,计划利用水下机器人清洁船体。
2020-03-04 08:49:10448 HMM方面表示,在与韩国水下机器人制造商TAS Global签署合作协议后,将使用水下自动机器人清洁船体水下部分表面。
2020-03-04 11:47:412287 有一天,水下机器人可能会非常逼真地模仿鱼一样的生物,它们不仅能骗过真正的动物本身,也会骗过人类。这种能力可以获得各种信息,从鱼类的健康状况到外国船只的位置。
2020-03-23 10:54:22549 相对于陆地,人类在水下环境工作的困难程度和危险程度都要更高。特别是海洋环境更为复杂,也更容易遇到意外风险,所以一些水下作业用水下机器人取得人类来进行是必要的。
2020-05-10 15:14:55554 此次现场赛主要针对海洋环境监测、海上防险救生等需求,在真实开放的海洋环境条件下对水下机器人作业性能进行评测:针对水下机器人巡航与智能能力(感知、控制、驱动、通讯)进行考察
2020-06-10 16:20:132093 带有驱动电机、摄像头、水下机械手及各种作业工具,由水面提供能源进行有缆遥控作业的机器人,可用于海底油气工程、海洋科考、海上救援打捞、水下钻井、海底电缆铺设等多种领域,具体能进行水下机械手抓取,水下结构物拆装施工,井口打磨清洗以及沉船沉物打捞等各种作业。其缆线可长至6000米甚至10000米。
2020-07-09 18:04:37651 除此以外在水下作业方面,水下机器人的出现与应用也能对水利工程监测、水环境监测、水下设施清洁维护、水下抗洪抢险等发挥出重大价值。有了水下机器人的助力,人们不仅能从水下近距离开展水利建设,更能将水利范围从河湖拓至海洋。
2020-07-20 10:38:52931 随着国内海洋石油工程、海洋科考、海洋打捞等领域对水下机器人使用需求的不断扩大,相关政府部门在项目立项与实施方面水下机器人的产业化发展给予政策倾斜,未来我国水下机器人产业化、规模化进程将会进一步加快。
2020-08-18 10:04:343245 本届大赛历时3天,大赛期间还将举办“人工智能与水下机器人高峰论坛”,将邀请数名国内相关领域的中国工程院院士以及百余名相关领域知名专家学者、产业界代表,共同针对人工智能和水下机器人领域的尖端课题展开探讨。
2020-09-21 17:52:241806 音圈模组水下机器人为生命护航。大家都知道海洋底有很多奇妙的神武等着我们去探索和发现,而且一些水底救援工作要开展,人们潜入到水底是很危险的事情,因此水下机器人就横空出世了。是能代替人类作业的水下救援及巡检机器人。
2021-03-24 14:49:00748 近期,武汉长江航道救助打捞局使用深之蓝水下机器人完成一次2200米高海拔水下检查项目。 该水电站位于黄河流域。主要任务是对水电站某机组进水口拦污栅、检修闸门门槽及相关流道水下检查,进口水快速闸门
2021-04-09 17:06:302164 是无法进行水下作业、定位、路径规划等一系列的任务; 二是水下环境极其复杂多变、干扰多、噪声大。因此解决AUV在水下的定位是在水下作业的一个重要前提。 真尚有水下定位有方法 真尚有水下高度,航向和姿态测量方案利用宽带复合传感器和先进
2021-07-16 16:02:23840 水下机器人行业主要集中在北美、欧洲、中国、日本等国家和地区。目前,中国是最大的生产地区。从消费端来看,2018年中国水下机器人行业占全球销量的25.07%,中国巨大的市场需求和增长潜力,吸引了几乎所有国际巨头在中国开展相关业务。
2022-06-08 11:35:226619 海洋包含着一片似乎无边无际的有待探索的领土,在全球范围内绘制这些未知水域的地图是一项艰巨的任务。自主水下机器人舰队可能是帮助绘制地图的宝贵工具,但这些机器人需要能够在保持高效和准确的同时导航这一杂乱的区域。
2022-08-23 10:15:42880 ROV水下作业仿真平台适用于海洋工程、海洋科考、水利水电工程等典型领域的ROV作业仿真。通过ROV作业仿真平台进行作业仿真预演与培训,可以增强ROV作业安全性,提升作业效率,节约作业成本;
2023-03-03 11:41:061189 L04水下超声波测距避障传感器主要应用于水下机器人,安装在机器人四周。当传感器检测到有障碍物时,会将数据快速传给机器人,通过判断安装的方向和返回的数据可做出停止、转向、减速等一系列操作来实现智能行走。
2023-03-31 15:24:291766 的水质监测解决方案。 在安全方面,河流、海洋、湖泊水底是否有危险物物以及水质好坏情况的检测也是水下机器人的一个工作,虽然这些任务*在水下完成,但对于一些水下的机器人来说,这并不是什么难题。任何作业都要保证安全*,
2023-04-11 16:26:38222 
水下超声波避障传感器主要应用于泳池清洁机器人,传感器安装于机器人四周。当传感器检测到有障碍物时,会将数据快速传给机器人。
2023-05-20 10:30:34716 
水下测距传感器,经过1年多的实验和实践,并进行实验标定后,该传感器能够连续实时的测距、显示和传输数据,可用于水下机器人避障防撞侦测、移动机器人进行测距、导航等。如需
2022-01-21 17:11:42313 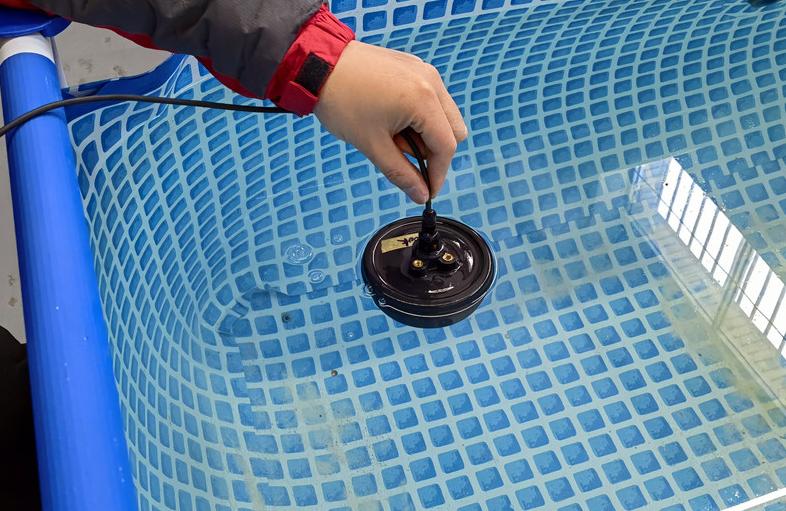
电子发烧友网站提供《水下机器人开源构建.zip》资料免费下载
2023-07-11 10:45:521 随着服务机器人的技术发展,游泳池水下清洁的机器人在市场上广受青睐,要实现水下自动规划泳池清洁路线,离不开性价比高,应用适配的超声波水下测距避障传感器。
2023-07-22 09:02:42627 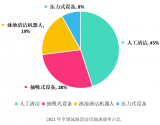
传感新品 【江西科技师范、南方科技大学:用于水下机器人的抗疲劳导电聚合物水凝胶应变传感器】 近年来,高灵敏度柔性应变传感器因其在软体机器人、医疗保健、智能可穿戴设备等领域的巨大前景而引起了极大的关注
2023-08-03 08:45:03557 
这个“长着三个触角”的水下机器人看上去是不是很萌?它使用的是一种新型的由三个球形磁耦合矢量推进器组成的推进系统。与传统的水下机器人使用多个固定推进器来实现多自由度(DOF)推进相比,矢量推进器具有多自由度、寄生推力小,以及效率高等优势。
2023-08-24 11:21:41913 
近些年随着技术发展,我国智慧海洋建设飞速发展,目前正推动海洋传统行业数字化、绿色化、智能化新升级。鳍源科技引领时代发展,与华为、中国移动等伙伴携手,将AI智能水下机器人与5G网络相结合,推出全新
2023-09-08 14:18:58242 功率放大器模块是一种电子设备,它可以将输入信号的功率转换为输出信号的功率。在水下机器人中,功率放大器可以起到驱动电机、传感器等负载的作用,是实现水下机器人功能的重要组成部分之一。下面将详细介绍
2023-12-18 16:25:26165 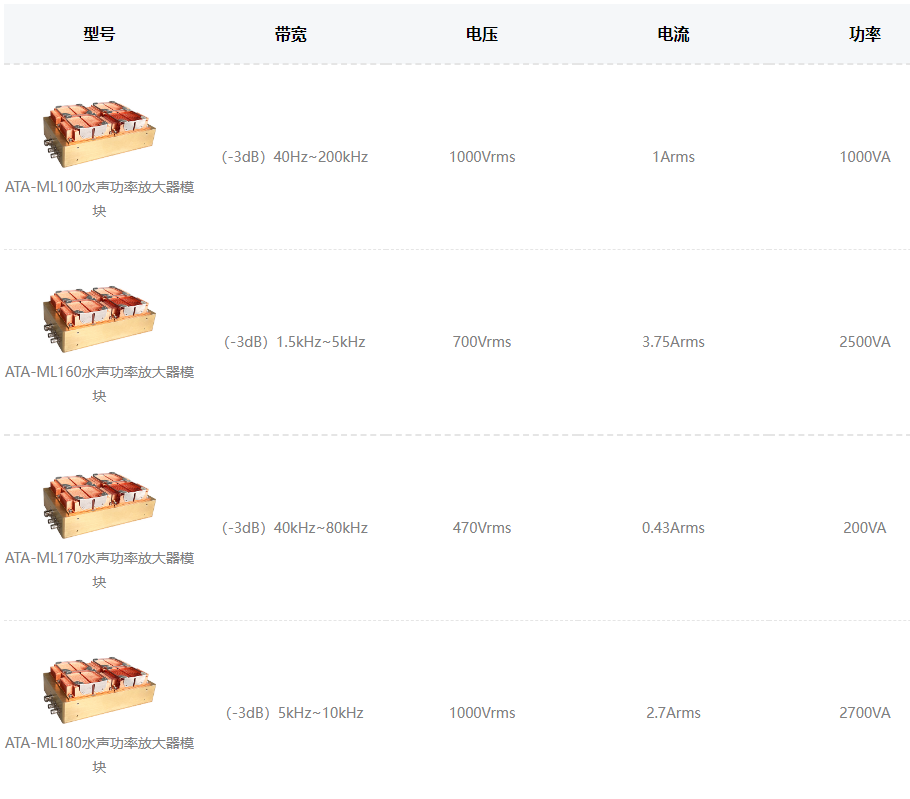
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论