 电子发烧友App
电子发烧友App


机械端面密封的动压效应
随着工程机械大型化、自动化、智能化、集成化程度的提高,许多机械旋转运动副处于高温、高压、高速工作状态,它们之间的工作状态直接影响了其承担的机械功能完成的好坏,因此开展旋转轴的密封研究就显得十分重要,本文将对机械密封机理研究的现状进行分析与探讨。
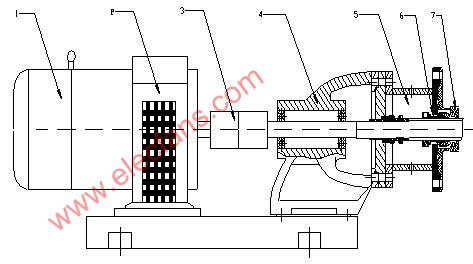
机械端面密封是一种轴向端面密封,简称机械密封,又称端面密封,是常用的旋转轴密封。与其它形式的密封(如压盖软填料密封)相比,具有泄漏量低、摩擦磨损小、使用寿命长、工作可靠、不需日常维护等一系列优点。因此在现代工业生产中得到了广泛的应用,特别是机泵设备中应用更加普遍,重要场合85%以上机泵使用了机械端面密封。此外,机械端面密封在许多高压、高温、高速、易燃、易爆和腐蚀性介质等工况下也取得了较好的使用效果。
机械密封机理的研究主要集中在密封中流体动压效应的研究。无论是接触式机械密封还是非接触式机械密封,都希望通过流体动压效应来提高密封的承载能力,从而减小摩擦、磨损和漏损,提高密封的可靠性以延长密封的寿命。决定机械密封中的流体动压效应的理论基础是英国著名的科学家雷诺(Reynolds)1886年提出的润滑理论的基本方程——雷诺方程。对机械密封的流体动压效应的研究从本世纪60年代初开始,至今已取得了不少的研究成果,但仍然存在一些尚未解决的问题,研究工作主要集中在以下3个方面。
1 平面端面密封中的流体动压效应研究
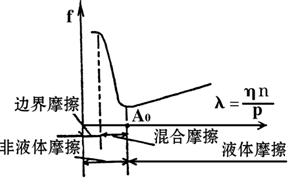
标准的平衡型和非平衡型机械密封通常是在边界润滑条件下工作,其摩擦系数一般为f=0.07± 0.03。在该工况下,虽然在密封缝隙中存在液体层,但是液层可能局部中断,而且几乎没有压力,因而也就没有显著的粘性效果。由于高的端面摩擦生热,即使是具有最好的热传导和冷却特性的端面配对材料,其压力-速度极限即PV值极限也很低。为了提高密封的PV值极限,拓宽平面端面密封的使用范围,必须借助于密封端面液膜的流体动压效应。Denny(1961)通过试验首次观察到两密封端面是被一层薄的液膜所隔离。自此以后,为了更好地理解机械端面密封的工作机理,许多研究者做了大量的工作,这些工作大部分是涉及流体膜压的产生机理。密封端面上的流体膜压主要取决于端面间隙的形状和尺寸,即流体膜的几何形状和厚度。文献?1、3?详细地回顾了曾经提出的各种压力产生机理。这些机理包括:偏心和偏斜、表面波度、表面粗糙度、相变、热弹效应和振动。研究成果表明,平面端面密封主要是在混合摩擦状态下工作,流体膜承担很大一部分载荷,其余载荷由端面微凸体接触来承担。
根据经典的流体动压润滑理论,平行平面滑动中液膜不具有承载能力。然而Lebeck(1978)通过整理和分析滑动轴承和机械端面密封中有关平行平面滑动众多研究者的大量试验数据,得出在平行平面滑动中流体膜也具有一定的流体动压效应,能够产生有用的承载能力。在对各种可能的承载机理(热楔、热密度、热粘度、微凸体润滑、微凸体碰撞、挤压效应)进行详细的理论分析和比较后指出,这些机理在特定的密封设计中可能起到一定的作用,但是一般情况下不可能产生明显的承载能力,然而表面的整体倾斜、锥度和波度能够产生很强的流体动压承载能力,理论和试验研究都表明表面宏观波度是最可能的流体动压承载机理。表面波度分两类:一类是加工过程中形成的表面微观波度;另一类是由磨损、弹性变形和热变形共同作用产生的表面宏观波度,表面波度的流体动压效应逐步引起了各国学者的普遍重视,相继提出了机械端面密封的各种波度模型。
平面端面密封虽然存在一层薄的流体膜,能够承担一部分载荷,但在一般情况下,这层薄的流体膜是不完整的,存在部分微凸体的直接接触。在高压、高速和低粘工况下,微凸体的直接接触将是主要的承载部分,此时密封中产生的摩擦和磨损很大,可能导致密封端面温度急剧上升,液膜气化,以至密封失效。为了克服接触式机械密封存在的问题,提出了非接触式机械密封——流体动压和流体静压机械密封。
2 流体动压机械密封中的流体动压效应研究
流体动压机械密封属非接触式密封,密封面被一层完整的膜厚为几个微米的流体膜所隔开,摩擦状态是纯粹的流体润滑工况。这些密封用在高压差、高速和润滑性差的介质密封(气体、沸腾液体、低温液体等)条件下工作。
在流体动压密封中,为了使端面摩擦副楔开,利用了密封面的动能。在静止时密封面接触,消除泄漏。当密封高速旋转时,由薄层流体膜将密封面分开,出现有限的泄漏,甚至无泄漏。为了保持密封面的非接触工况,密封面间隙内液体介质或气体介质流体膜层要承受挤压载荷,即流体膜应具有流体力学刚度。
在流体动压密封中摩擦副表面的分离和承受挤压载荷,是靠液体在摩擦力作用下从间隙收敛部分被压出并产生作用力来实现的。朝着滑动速度方向间隙收敛段落也可通过密封面开槽、开口或台阶来产生。使用最广泛的结构是雷列台阶式、斜面式和螺旋槽面式密封。
螺旋槽面密封用于密封液体,可作上游泵送密封。在上游泵送密封中,密封相当于一小流量高压泵,它将少量的封液从低压侧沿着螺旋槽泵送到高压侧的密封室内。Salant等提出了考虑螺旋槽面上游泵送密封中的空化效应的解析模型。Salant等在文献中研究了流槽(浅槽)贯穿整个密封面的情形,并研究了流槽形状(斜线槽和螺旋槽)对泄漏量的影响。
许多文献介绍了雷列台阶式、斜平面式、圆叶形和直叶形非接触式上游泵送密封和相应的算法。
综上所述,流体动压密封是利用密封端面的宏观几何形状模型来产生流体动压效应的机械密封,其理论基础仍然是雷诺方程。这些宏观几何形状模型包括倾斜块(周向斜面、周向台阶、周向斜平面)和各种流槽(周向槽、直弦槽、三角槽、半圆形槽、矩形槽、弧形槽、叶形槽、螺旋槽、人字形槽)。
3 热流体动压机械密封中的流体动压效应研究
标准的平衡和非平衡型机械密封通常是在边界润滑条件下工作。由于端面摩擦生热,即使是具有最好的热传导系数和冷却特性的端面配对材料,其PV值极限也很低。为了提高密封的PV值极限,拓宽平面端面密封的使用范围,适应现代工业向高参数发展的需要,机械密封必须设计在低摩擦系数下工作。密封端面间的一层完整的薄膜,将改善密封的润滑工况,有助于降低密封端面摩擦系数。这方面,热流体动压机械密封证明是非常成功的。
由于压力变形产生的非平行面楔效应叫压力楔效应,由于温差局部热变形产生的楔效应叫热楔效应,由压力变形和局部热变形产生的楔效应叫热流体动力楔效应。热流体动压机械密封就是利用热流体动力楔效应产生流体动压作用力的机械密封,它是一种新型的机械密封。
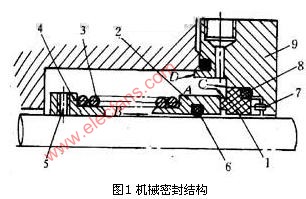
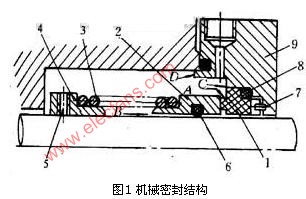
热流体动压机械密封的结构和普通的机械密封没有多大差别,只是在密封的动环或静环端面上开设了各种形状的流槽,这些流槽的深度为毫米量级,属深槽密封。
热流体动压机械密封静止时,摩擦副表面是平行平面。在运转时,由于摩擦生热的缘故,密封环被加热而且受热是不均匀的。受热最厉害的区域是密封环由工作介质冷却的槽间或镗孔间的中间段落。由于受热冷却的不均匀,密封面的平面度遭到破坏并形成收敛型间隙区域。热流体动压机械密封根据它的过程的复杂性和间隙与泄漏量的大小,居于接触式机械密封和非接触式机械密封之间。
E.Mayer在非平衡型机械密封上靠测压孔测量密封缝隙中的压力时,第一个发现并提出热流体动力效应。在他的博士论文中对径向矩形槽密封进行了试验研究。1969年E.Mayer发表了圆弧形循环槽热流体动压机械密封的试验研究结果。通过大量的试验研究表明,圆弧形循环槽热流体动压机械密封可以大大提高密封的PV值极限,得出这类密封优于普通机械密封之处在于:随着PV值的增加,摩擦系数反而降低。E.Mayer对热流体动压机械密封的作用机理作过一些定性的描述,认为圆弧形循环槽热流体动压机械密封实际就是Mitchell或Kingsbury止推轴承与机械密封的联合。在旋转的过程中,由于槽的边缘受到的冷却比远离槽部分强烈得多,这样就形成了热流体动力楔。E.Mayer的工作主要是在试验研究方面,产生了不少有用的专利,但没有提出合理的理论分析模型和方法。
Golubiev(1967)首次提出了热流体动压密封的完整的理论分析模型和方法。在模型中,假定密封由金属环和碳石墨环组成,金属环密封面具有几个微米深的刮痕网络,两刮痕间的距离为零点几毫米,碳石墨假定为绝对光滑的,两密封面被一层只有零点几微米的薄层完全隔开。在压差的作用下,液体首先进入刮痕内,进入刮痕的液体被高速旋转的动环表面强行带入间隙中,由于摩擦,间隙内的液体被加热,同时也加热了金属表面,使之受热膨胀,流体和金属环表面的温度沿着运动方向逐渐升高,使金属膨胀不均匀。由于受热不均匀,在刮痕间的金属表面具有倾斜度,间隙变成收敛间隙。此时在金属表面有流体动压作用力产生。
由于两刮痕区间的间隙与径向长度相比非常小,可将此问题视作平面问题来简化处理。根据流体动力学和热弹性力学理论,提出了解决此问题的联立方程组,这些方程包括间隙内液体膜层的运动方程、连续方程、间隙内液体的能量方程、液体粘温关系、金属环的热传导以及间隙的变化方程。Golubiev的理论模型揭示了局部热变形产生热楔效应这一实质。遗憾的是Golubiev的理论未被试验所证实。
事实上,Golubiev的理论模型存在不合理的地方:密封面间隙为零点几个微米,这基本上与实际密封表面的粗糙度属同一量级,此时应考虑表面粗糙度的影响,径向压差的影响被忽略了;金属环面刮痕的深度为几个微米,这实际上是属浅槽范畴,对浅槽情形,提出的刮痕内压力和温度的边界条件一般不满足。
有趣的是,W.E.Key和R.F.Salant等提出了热流体动压垫深槽机械密封的理论分析模型。模型中分析的是将流槽——矩形槽设置在软面石墨环上的情形,考虑了由力变形和热变形在动、静环密封面形成的径向锥度产生的流体静压效应和由开槽环表面力变形形成的周向波度产生的流体动压效应。这是一种压力楔模型。
国内在热流体动压机械密封的试验研究方面作了一些工作,但理论上没有取得进展。
















 工商网监
工商网监
评论