 电子发烧友App
电子发烧友App


用PLC改进鼠笼式异步电动机的控制方案
传统的鼠笼式异步电动机起、制动控制方式一般有四种,即定子回路串电阻起动,Y/△起动,自耦变压器起动和延边三角形起动;制动方式有三种,反接制动,能耗制动和电容制动,其中任何一种起、制动控制方式的实现通常由继电器-接触器控制系统来完成。下面就以定子回路串电阻降压起动和反接制动为例,分析由继电器-接触器实现的鼠笼式异步电动机的起、制动控制。
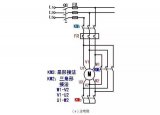
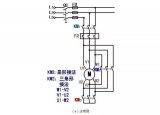
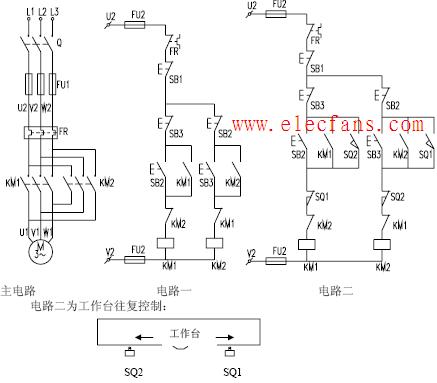
如图1所示,此控制电路含三个接触器和一个中间继电器线圈,12个触点。起动时,KM2、KM3线圈均处于断开状态,按下起动按钮SB1,KM1线圈通电并自锁,电动机串电阻减压起动。当电动机转速上升到某一定值时(此值为速度继电器KS1的整定值,可调节,如调至100r/min时动作),速度继电器KS1的常开触点闭和,中间继电器KA通电并自锁,KA的常开触点接通接触器线圈KM3,KM3的主触点在主电路中短接定子电阻R,电动机转速上升至给定值时投入稳定运行。

图1 继电器接触器控制系统
制动时,按下停机按钮SB2,KM1线圈断电,其主触点断开三相电源;控制电路中常开触点断开,KM3失电,限流电阻串入;常闭触点闭合,接通反接制动接触器KM2,对调两相电源相序,电动机处于反接制动状态。当转速下降至某一定值时(比如100r/min),KS1常开触点断开KA,继而断开KM2,电动机失电,迅速停机。
这种传统的继电器接触器控制方式控制逻辑清晰,采用机电合一的组合方式便于普通机类或电类技术人员维修,但由于使用的电气元件体积大、触点多、故障率大,因此,运行的可靠性较低。随着PLC技术的发展,使用PLC进行电机的运行控制已成为必然趋势。
2、采用PLC实现鼠笼式异步电动器起、制动控制
可编程序控制器是在继电器控制和计算机控制的基础上开发的产品,自60年代末,美国首先研制和使用可编程控制器以后,世界各国特别是日本和联邦德国也相继开发了各自的PLC(programmable logic controller),因此,与传统的继电器接触器控制系统相比较,笔者认为采用PLC实现鼠笼式异步电动机起制动控制是最明智的选择。下面就是笔者设计的采用PLC实现的鼠笼式异步电动机起制动控制电路的接线图、梯形图和指令程序,如图2和图3所示。

PLC控制逻辑与传统的继电器接触器控制系统基本一致,其工作过程如下:
起动时,按下起动按钮SB1,X400常开触点闭合,Y430线圈接通并自锁,KM1线圈接通,主触头吸合,电动机串入限流电阻R开始起动,同时Y430的两对常开触点闭合,当电动机转速上升到某一定值时,KS1的常开触点闭合,X402常开触点闭合,M100线圈接通并自锁,M100的一对常开触点接通Y432的线圈,KM3线圈有电主触头吸合,短接起动电阻,电机转速上升至给定值时投入稳定运行。
制动时,按下停机按钮SB2,X401常开触点断开Y430线圈,使KM1失电释放,而Y430的常闭触点接通Y431线圈,制动用的接触器KM2线圈通电,对调两相电源的相序,电动机处于反接制动状态。与此同时,Y430的常开触点断开Y432的线圈,KM3失电释放,串入电阻R限制制动电流。当电动机转速迅速下降至某一定值时,KS1常开触点断开,X402常开触点断开M100的线圈,M100的常开触点断开Y431线圈,KM2失电释放,电动机很快停下来。过载时,热继电器FR常开触点闭合,X403的两对常闭触点断开Y430和M110的线圈,从而使KM1或KM2失电释放,起到过载保护作用。
上述控制过程指令程序如下:

3、PLC与继电器接触器控制系统的比较
通过对鼠笼式异步电动机起制动的传统控制方法和PLC控制方法的比较,从某种意义上看,PLC控制是从继电器接触器控制发展而来的。两者既有相似性又有很多不同处。
3.1 二种方案的不同点
(1) PLC内部大部分采用“软”逻辑
继电器接触器控制全部用硬器件、硬触点和“硬”线连接,为全硬件控制;PLC内部大部分采用“软”电器、“软”接点和“软”线连接,为软件控制。
(2) PLC控制系统结构紧凑
继电器接触器控制系统使用电器多,体积大且故障率大;PLC控制系统结构紧凑,使用电器少,体积小。
(3) PLC内部全为“软接点”动作快
电器接触器控制全为机械式触点,动作慢,弧光放电严重;PLC内部全为“软接点”动作快。
(4) PLC控制功能改变极其方便
继电器接触器控制功能改变,需拆线接线乃至更换元器件,比较麻烦;PLC控制功能改变,一般只需修改程序便可,极其方便。
(5) PLC控制系统制造周期短
PLC控制系统由于结构简单紧凑,基本为软件控制,因此设计、施工与调试比继电器接触器控制系统周期短。
此外,由于PLC技术是计算机控制的基础上发展而来,因此,它的软硬件设置上有着传统的继电器接触器控制无法比拟的优势,工作可靠性极高。
3.2 PLC方案的设计要点
(1) 设置滤波
在PLC中一般都在输入输出接口处设置π形滤波器,它不仅可滤除来自外界的高频干扰,而且还可减少内部模块之间信号的相互干扰。
(2) 设有隔离
在PLC系统中CPU和各I/O回路(主要指数字口)几乎都设有光耦合器作隔离,以防止干扰或可能损坏CPU等。
(3) 设置屏蔽
屏蔽有两类:一类是对变压器采取磁场和电场的双重屏蔽,这时要用既导磁又导电的材料作为屏蔽层;另一类是对CPU和编程器等模块仅作电磁场的屏蔽,此时可用导电的金属材料作屏蔽层。
(4) 采用模块式结构
PLC通常采用积木式结构,这便于用户检修和更换模板,同时在各模板上都设有故障检测电路,并用相应的指示器标志它的状态,使用户能迅速确定故障的位置。
(5) 设有联锁功能
PLC中个各输出通道之间设有联锁功能。以防止各被控对象之间误动作可能造成的事故。
(6) 设置环境检测和诊断电路
这部分电路负责对PLC的运行环境(例如电网电压、工作温度、环境的湿度等)进行检测,同时也完成对PLC中各模块工作状态的监测。这部分电路往往是与软件相配合工作的,以实现故障自动诊断和预报。
(7)设置Watchdog电路
PLC中的这种电路是专门监视PLC运行进程是否按预定的顺序进行,如果PLC中发生故障或用户程序区受损,则因CPU不能按预定顺序(预定时间间隔)工作而报警。
(8) PLC的输入、输出控制简单
PLC是以扫描方式进行工作的,即PLC对信号的输入、数据的处理和控制信号的输出,分别在一个扫描周期内的不同时间间隔里,以批处理方式进行,这不仅使用户编程简单、不易出错,而且也使PLC的工作不易受到外界干扰的影响;同时PLC所处理的数据比较稳定,从而减少了处理中的错误;另外,PLC的输入、输出的控制较简单,不容易产生由于时序不合适而造成的问题。
4、结束语
由于PLC在设计制造时充分考虑到工业控制的现场环境问题,并采取了多层次、多种有效措施来提高工作可靠性,因此,采用PLC实现电机控制,特别是对工作环境条件较恶劣的工矿企业应该是一项明智之举










 工商网监
工商网监
评论