 电子发烧友App
电子发烧友App


机械式停车设备行业在我国是近十几年来发展起来的新兴行业。随着我国人民生活的不断提高和汽车工业的高速发展,机械式停车设备以其独有的优越性,最近几年得到了广泛的应用。智能电梯式机械停车设备是自动化程度较高的机械式停车设备,为了能在提高空间利用率的同时又保证较高的存取车效率,对停车设备的设计、制造、安装都要求有更高的标准,电气控制系统也更具难度。本文介绍了我单位改造的上海国际金陵大厦智能化电梯式机械停车设备电气控制系统的设计。
二、总体方案设计
智能化电梯式机械停车设备采用目前国内最先进的智能控制系统,司机只要将车开到旋转升降台上,控制系统便自动安全地将其输送到指定的空车位,完成整个停车过程。采用电梯式停车设备,无论从高度、技术水平还是整个建设规模,是创造更多空间的最佳选择。上海国际金陵大厦的电梯式机械停车设备的停车层采用钢结构,分布在电梯行走的中央通道的两侧,每层停车层由左右各2个停车位组成,每个车位上均设置有停车定位架。升降机的总提升高度达42米。电梯式立体车库平面总图如图1所示。

图1 电梯式立体车库平面总图
1.主要技术性能指标设计
(1)停车标准尺寸(L×W×H):5050mm×1850mm×1550mm。
(2)停车数量:46。
(3)停车重量:1700Kg。
(4)升降电机功率:22kW;速度:120m/min。横移电机功率:2.2?kW;速度:20m/min。转台电机功率:1.5kW;速度:4r/min。
(5)控制方式:PLC控制。
(6)操作方式:IC卡、触摸屏、按钮箱。
(7)存取时间:平均85s。
2.设备特点分析
(1)占地少,容车量大,高层设计最高能够达到平均一辆车仅占一平方米的空间。
(2)安全性好,采用多重安全保护装置确保设备运行安全。
(3)车辆存取速度快、效率高,车辆存取最长时间≤120秒。
(4)采用变频调速技术,智能化程度高,可预约存取车、上下班高峰存取车和空车位导向。
(5)存取车辆均向前开,无需倒车。
(6)计费、监控、检测全智能化,管理人员少。
三、控制系统工作原理
这套全自动化系统的技术核心设备是升降机和铲车,司机存取车时,操作员不必具备专业技能,只需将车开到进出口层的旋转工作台上,控制系统将自动发出指令,旋转工作台自动旋转到升降机位置,然后升降机上升至要停放的楼层,升降机上的铲车把车辆送到规定的停车位置,完成存车动作。取车过程则相反,由于在车库的进出口室设置了一部自动转盘,使司机取车时不用倒车出库。整个停车库系统还配有停车收费管理系统,停车监控系统,停车报表打印系统等。控制系统总体方案图如图2所示。
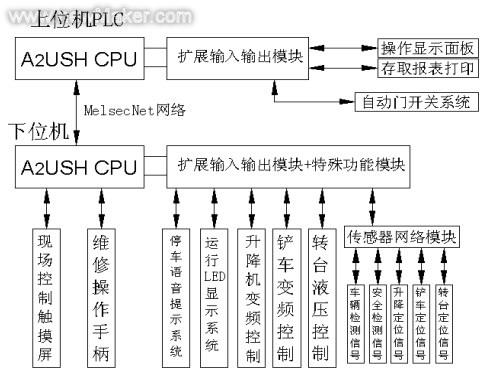
图2 控制系统总体方案图
四、控制系统硬件设计
控制器采用三菱AnS系列的PLC,它是专为顺序控制和数学运算而开发的控制器。AnS系列的PLC提供多种网络系统组合和特殊功能组件,使其更完美地适用于过程控制、定位控制和其它各种类型的控制。本系统中下位机PLC模块和各部件的功能:底板(A1S38B)、电源模块(A1S61PN)、控制单元(A2USH-CPU-S1)、输入模块:A1SX42(传感器和按钮输入信号)、输出模块(A1SY10—控制输出的信号)、网络通信模块(A1SJ71AP21—进行网络通信)、高速计数模块(A1SD62—编码器读数计数)、模拟量输入模块(A1S64AD—变频反馈信号)、模拟量输出模块(A1S62DA—变频输出信号)、串口通讯组件(A1SJ71UC24-R2—触摸屏连接的通讯接口);上位机PLC模块和功能:底板(A1S38B)、电源模块(A1S61PN)、控制单元(A2USH-CPU-S1)、输入模块(A1SX42-传感器和按钮输入信号)、输出模块(A1SY10—控制输出的信号)、网络模块(A1SJ71AP21—进行网络通信)、通讯组件(A1SJ71UC24-R2—操作界面连接的通讯接口)、通讯组件(A1SJ71UC24-R2—打印机连接的通讯接口)。
根据实际应用情况,现场传感器网络设计包括16路传感器输入点信号连接到4个TM-4NC输入单元,通过长距离通讯线连接到TM-S16通讯单元,然后连接到PLC的输入模块,注意配置正确的通讯单元参数。升降电机的变频器采用富士公司的矢量变频器FVRVG5S-2A-37?kW,铲车变频器采用三菱公司的FR-A520-5.5kW。
五、控制系统软件设计
软件部分的中心任务是上位PLC操作程序和下位PLC操作程序设计。上位PLC操作程序包括:操作显示数据程序、存取报表打印程序、数据维护程序。下位操作程序包括:自动存车操作子程序(P101)、自动取车操作子程序(P102)、自动存入空板子程序(P105)、自动取出空板子程序(P106)、维修手柄操作程序、手动操作存取程序、触摸屏操作程序。软件流程图如图3所示。

图3 软件流程图
存取车程序操作设计了自动、手动、检修、只存、只取操作方式。“只存”操作方式应用在上班高峰时,此时主要是存入车辆;“只取”操作方式应用在下班高峰时,此时主要是取出车辆。上位机的应用软件对系统的报警和实时工作状态进行处理分析使操作管理人员充分了解停车场车位的可用数量、具体位置及用户分类等,使操作管理人员合理调度,合理科学地对车场进行管理。
六、控制系统关键技术说明
1.升降机定位设计
升降机采用高速变频矢量控制。采用编码器(1200P/R)和定位地址芯片技术,应用输入中断处理,并根据不同的存取层调用不同的速度曲线数据,每层的定位精度可达到±5mm,平均存取车辆时间为98秒。低速定位时矢量变频的速度为50Hz~10Hz,矢量变频高速运行时的速度为700Hz,加减速时变频输出速度按PLC数据运算表输出,保证加减速平稳。升降机矢量变频控制如图4所示。

图4 升降机矢量变频控制图
矢量变频控制符号说明:
FWD——PLC输出控制的变频正转指令(升降机上升);
REV——PLC输出控制的变频反转指令(升降机下降);
X1——PLC输出控制的变频预激磁指令;
X2——PLC输出控制的变频停止指令;
X3——PLC输出控制的负载补偿偏置(+)指令;
X4——PLC输出控制的负载补偿偏置(-)指令;
RYA——变频器运行有速度时,输出信号到PLC;
30B——变频器运行错误时,输出报警信号到PLC;
I2、I1——PLC特殊功能模块A1S62DA输出模拟信号(0~10V)控制矢量变频速度;
A0、N——变频负荷反馈信号(0~10V)输入到PLC特殊功能模块A1S64AD。
2.高速计数模块应用设计
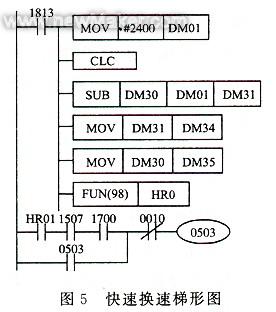
选用高速计数特殊功能模块A1SD62。当接通电源或PLC复位时,初始值被写入缓存中,它有2个通道的高速计数,A1SD62共使用32点输入和32点输出信号,比如系统使用X20-X3F、Y20-Y3F,那么Y34是CH1计数允许命令,Y3B是CH2计数允许命令。CH1?的采样计数值缓存地址是4、5,CH2?的采样计数值缓存地址是36、37。两个通道高速计数的程序如图5所示。
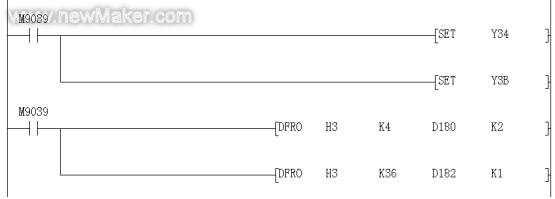
图5 高速计数程序
3.数字-模拟变换模块应用设计
选用D/A特殊功能模块A1S62DA。它有2个通道的D/A转换,并设定数值的分辨率为1/4000,当数值为4000时,对应的模拟输入值为10V,数值为2000时,对应的模拟输入值为5V;数值为0时,对应的模拟输入值为0V。A1S62DA共使用32点输入和32点输出信号,比如系统使用X0-X1F、Y00-Y1F,那么X1是D/A变换器准备好标志,X2是出错标志,Y10是CH1?D/A变换值输出允许标志,Y11是CH2?D/A变换值输出允许标志,Y18是D/A模块出错复位标志,比如两个通道模拟量输出的程序如图6所示。

图6 模拟量输出程序
4.上位机和下位机通讯网络设计
上位机和下位机的通讯通过网络通讯模块A1SJ71AP21连接。需要在软件中设置网络参数。选择MelsecNet网络,上位机设置网络类型是MNET?II-主站点,起始I/O号为0120总站数为1。然后进行网络范围分配,设置主站的发信范围为W0000~W01FF,从站的发信范围为W0200~W03FF。下位机设置网络类型是MNET?II-本地站点,起始I/O号为0120。
七、结束语
通过调试运行,整个停车设备的结构紧凑、设计合理、运行良好,充分发挥了AnS系列PLC控制器的高可靠性、强功能性等特点,特别是AnS系列PLC的特殊功能模块在停车设备中的应用具有推广价值,对同行业的机械式智能化电梯式停车设备的设计具有借鉴意义。这种类型的停车设备,不仅在有效节约地域空间基础上科学解决了停车占地难题,而且还提升主体建筑的价值。高智能化、自动化程度高、绿色环保等特征在行业中都有较领先的优势,特别使用于城市立体车库的建造










 工商网监
工商网监
评论