 电子发烧友App
电子发烧友App


船舶自动化领域的一个重要组成部分是主机遥控系统。目前主机遥控系统技术方案多种多样,本文采用PLC工业控制网络来实现主机遥控系统的功能,具有经济性能好、硬件电路结构简单、工作安全可靠的特点。
在多PLC控制网络实现主机遥控系统设计的基础上,研讨主要设计整个PLC网络的总体结构和通讯方案,并通过通讯网络实现对主机的起停部分的自动控制及安保系统设计。
2 主机遥控PLC网络控制总体结构设计及通讯方式的实现
2.1 主机遥控PLC网络控制总体结构设计
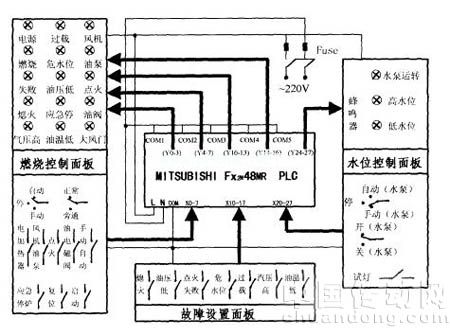
PLC控制网络用于主机遥控系统的控制,包括两台S7-200PLC。其中一台用于主机起停和转速调节控制,安装在机控室;另一台用于完成电子调速器的任务,安装在机舱。另设计算机作为监视平台,用来监视整个系统的重要信号。
整个网络的主要设备为:两台S7-200PLC、一台微型机、网络连接器、PC/PPI电缆、RS-485电缆。
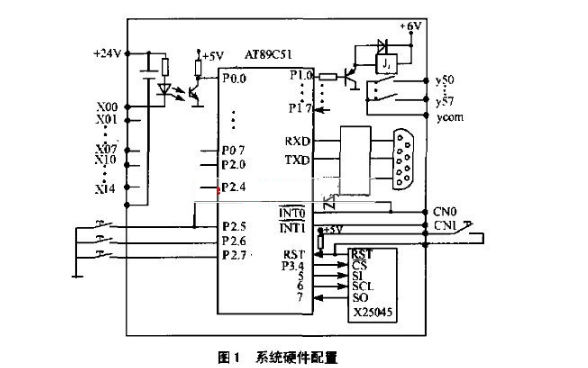
根据总体通讯设计思路,我们的总体结构图设计如图1。
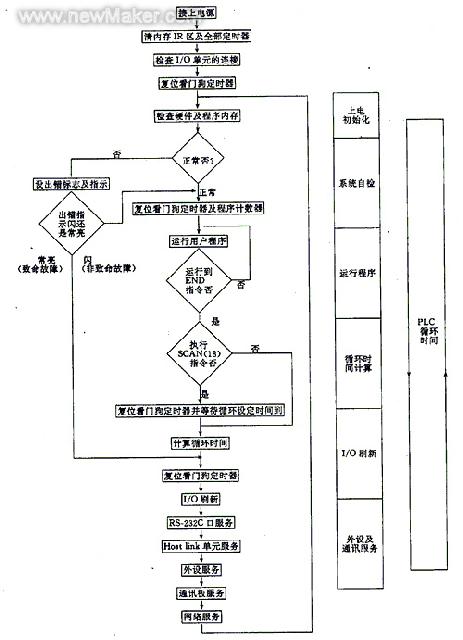
在S7-200网络通讯中,可以实现两种通讯协议进行通讯而不互相干扰。但前提是两种协议的波特率必须相同,由于只有一个通讯口,波特率只支持9600波特,因此在多协议通讯时,波特率设置为9600波特。对于多协议的组合方式,作者采用了总线分时复用法,在总线分时控制中,作者通过几个定时器组成矩形波,从而形成高低不同时段分别进行PPI协议通讯和自由口通讯。主程序流程图见图2。PPI通信程序流程见图3。自由口通信程序的流程见图4。
3 主机遥控系统的设计
3.1 起停部分的设计
作者在设计过程中选择的对象是最常见的B&M低速机,起停控制主要包括5个部分:起动控制,慢转控制,停车控制,重复起动控制。以正车起动为例,系统须针对两种情况:停车情况下的起动和正常反向起动,都能确保正车起动电磁阀的通断,同时还须判断重复起动的状态,正车起动的程序流程如图5所示。
3.2 转速控制部分的设计
本设计是用模拟量输入模块EM235来读取车钟指令和转速反馈。PLC主站首先读入模拟量,通过三次移位,可以得到12位的数字信号,然后通过定时中断程序对输入量进行数字滤波,滤波后的数据将与由外电路所确定的正常信号电压范围比较,可判断车令电位器的三个接线端有无断线故障,在确保信号的正常之后,再经过各种限制处理,限制环节主要包括临界转速限制,加速度限制和负荷程序限制,限制处理后的结果最后通过PPI通信协议发送给从站PLC电子调速器进而控制主机的转速。转速限制处理程序流程图6所示。
4 结束语
本文结合中小型船舶维修改造过程中对主机遥控系统的要求,提出一种硬件电路相对简单且易于实现、线路少、编程容易且功能较全面的主机遥控系统的设计及实施方案。系统采用两台S7-200PLC与一台计算机构成主机遥控系统的基本框架,利用串行通信总线可实现各个控制器及计算机之间的信息传输,该方案目前已经在实验室环境下完成了系统的设计以及调试工作。
在多PLC控制网络实现主机遥控系统设计的基础上,研讨主要设计整个PLC网络的总体结构和通讯方案,并通过通讯网络实现对主机的起停部分的自动控制及安保系统设计。
2 主机遥控PLC网络控制总体结构设计及通讯方式的实现
2.1 主机遥控PLC网络控制总体结构设计
PLC控制网络用于主机遥控系统的控制,包括两台S7-200PLC。其中一台用于主机起停和转速调节控制,安装在机控室;另一台用于完成电子调速器的任务,安装在机舱。另设计算机作为监视平台,用来监视整个系统的重要信号。
整个网络的主要设备为:两台S7-200PLC、一台微型机、网络连接器、PC/PPI电缆、RS-485电缆。
根据总体通讯设计思路,我们的总体结构图设计如图1。

图1 总体结构图
附表 通讯口引脚分配 
在S7-200网络通讯中,可以实现两种通讯协议进行通讯而不互相干扰。但前提是两种协议的波特率必须相同,由于只有一个通讯口,波特率只支持9600波特,因此在多协议通讯时,波特率设置为9600波特。对于多协议的组合方式,作者采用了总线分时复用法,在总线分时控制中,作者通过几个定时器组成矩形波,从而形成高低不同时段分别进行PPI协议通讯和自由口通讯。主程序流程图见图2。PPI通信程序流程见图3。自由口通信程序的流程见图4。

图2 主程序流程图见

图3 PPI通信程序流程
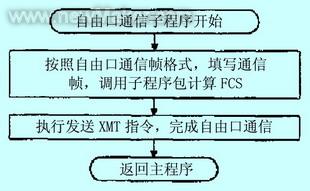
图4 自由口通信程序的流程
3 主机遥控系统的设计
3.1 起停部分的设计
作者在设计过程中选择的对象是最常见的B&M低速机,起停控制主要包括5个部分:起动控制,慢转控制,停车控制,重复起动控制。以正车起动为例,系统须针对两种情况:停车情况下的起动和正常反向起动,都能确保正车起动电磁阀的通断,同时还须判断重复起动的状态,正车起动的程序流程如图5所示。
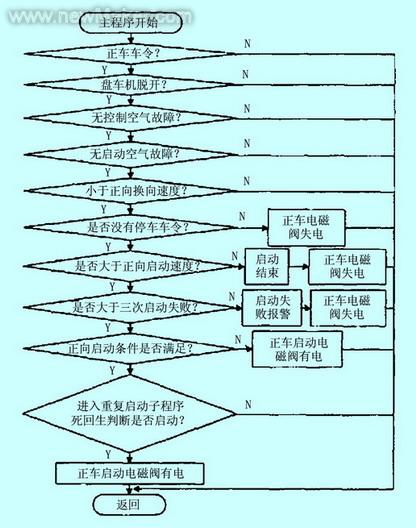
图5 正车起动的程序流程
3.2 转速控制部分的设计
本设计是用模拟量输入模块EM235来读取车钟指令和转速反馈。PLC主站首先读入模拟量,通过三次移位,可以得到12位的数字信号,然后通过定时中断程序对输入量进行数字滤波,滤波后的数据将与由外电路所确定的正常信号电压范围比较,可判断车令电位器的三个接线端有无断线故障,在确保信号的正常之后,再经过各种限制处理,限制环节主要包括临界转速限制,加速度限制和负荷程序限制,限制处理后的结果最后通过PPI通信协议发送给从站PLC电子调速器进而控制主机的转速。转速限制处理程序流程图6所示。
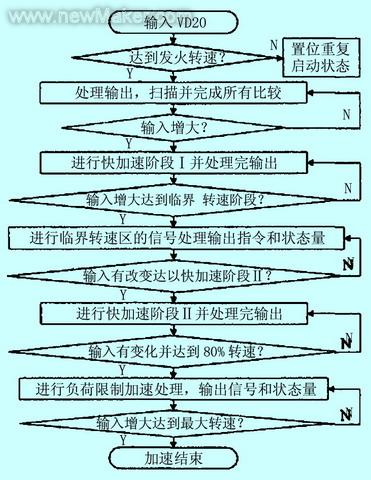
图6 转速限制处理程序流程
4 结束语
本文结合中小型船舶维修改造过程中对主机遥控系统的要求,提出一种硬件电路相对简单且易于实现、线路少、编程容易且功能较全面的主机遥控系统的设计及实施方案。系统采用两台S7-200PLC与一台计算机构成主机遥控系统的基本框架,利用串行通信总线可实现各个控制器及计算机之间的信息传输,该方案目前已经在实验室环境下完成了系统的设计以及调试工作。












 工商网监
工商网监
评论