 电子发烧友App
电子发烧友App


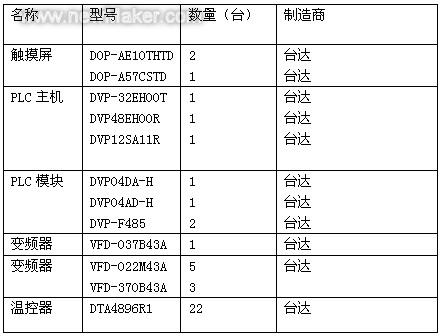
台达机电产品在自动冲床上的成功应用
本文介绍了利用台达DOP-A57BSTD触摸屏(HMI)、DVP-28SV11T可编程控制器(PLC)与ASD-B系列交流伺服、VFD-M系列变频器,实现对自动冲床的精确控制,使冲床操作更加方便、定位更加准确的同时,大大提高了生产效率和产品质量,为企业赢得更大的经济效益和社会效益。
关键词:自动冲床 PLC HMI 伺服电机 变频器 重复定位精度
1 .引言
海宁某太阳能机械配件生产企业,原来主要生产太阳能热水器的配件为主,由于国内近年来太阳能热水器产业的迅猛发展,带动了其配件行业的壮大,但是其装备业还停留在原有基础上,以通用冲床设备加简易工装来实现,无法满足大批量、高质量产品的需求,迫切需要专用的自动冲床来满足日益扩大的生产需要。应客户请求,配套开发应用于太阳能热水器行业专用的自动冲床控制系统。
图1 自动冲床
2 .自动冲床简介
本系统采用台达新一代高性能PLC---DVP28SV11T,作为该控制系统的控制器,该PLC是台达针对市场多轴传动控制开发的PLC产品,可以轻松实现4轴200K高速脉冲输出,支持两轴圆弧和直线插补。
考虑到行业产品多规格、多品种的要求,该系统采用台达DOPAE57BSTD触摸屏作为人机数据交换的平台,大大方便了用户进行参数修改、监控系统状态、故障查询和运行操作。
进给送料的定位精度和重复定位精度是冲床系统的重要指标,也是生产高质量产品和高生产效率的保证。送料系统采用台达新一代伺服产品ASD-B系列,满足控制精准和高响应性的要求。
冲床的冲压部采用台达VFD-M迷你型矢量变频器控制,满足用户冲压速度无级可调的要求,可以根据生产要求调节冲压速度。
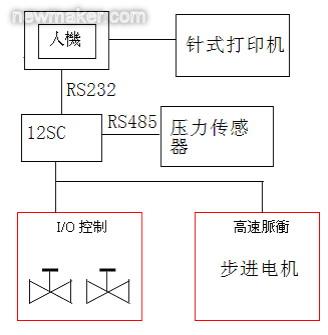
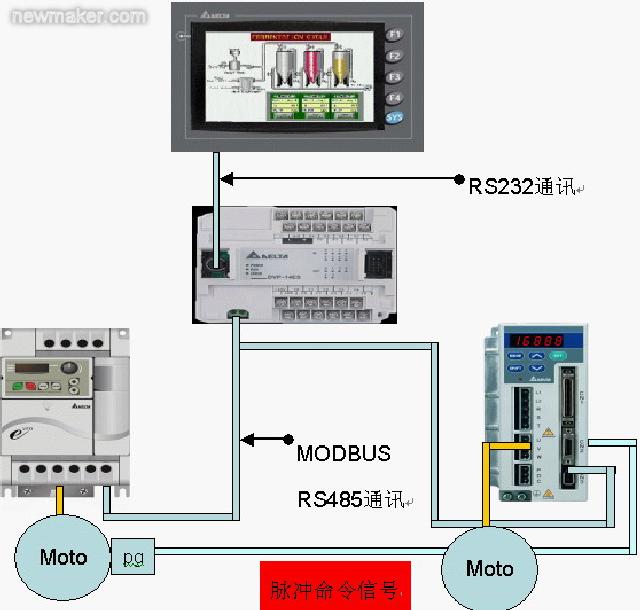
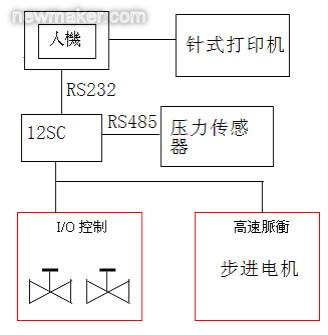
2.1基本架构
自动冲床系统包括冲压部、物料夹钳、X轴送料机构、Y轴送料机构、变频调速控制、伺服传动机构和操作台等组成。
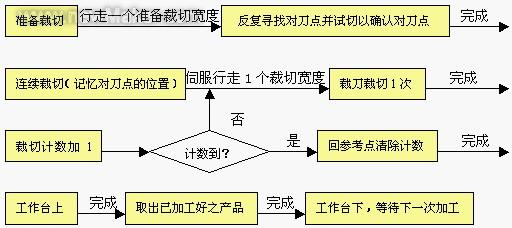
2.2 动作流程
手动方式:冲床的动作以步进的方式工作,每完成一个动作,按一下“启动”按钮,执行下一步动作,直至冲压整个动作完成,并停在原点位置,等待下次任务。

在手动模式下,不考虑冲头和X轴送料的配合,屏蔽安装在冲压部大飞轮上的进料检测用接近开关。该模式主要用于调试和新产品试产。
自动方式:
自动模式就是通过程序进行控制送料和冲压的整个过程,X轴进给的控制通过安装在冲压部飞轮上的两个接近开关,来检测冲压部运行的位置,其中一个接近开关作为冲压完成,开始送料信号,另一个接近开关作为停止送料信号,如果X轴在此信号到来前还没有完成送料,系统报警并停机,确保不产生次品,保证产品质量。
自动模式流程见上图,在执行自动流程时,冲压部是一直在工作的,X轴的送料是在冲压部冲压完成离开工件到下一次到达工件之间完成的,送料启动信号是安装在冲压部飞轮上接近开关信号。
3.系统设计及选型
3.1冲压部传动系统
冲压部采用台达VFD-M变频器拖动三相异步电机,功率为5.5KW,额定转速1440转/min。PLC通过MODBUS RS485通讯方式控制变频器的启动/停止和调速,参数设置和操作在HMI上实现。
冲压部速度设定值,决定X轴送料的最小速度。因为X轴每次送料时间必须小于冲压部上下往返一次的时间,否则就会拉坏工件或者冲错位置,造成次品。
X轴送料时间(t)和冲压部变频器设定频率(f)关系如下:
t = f / 50 *(60/1440) (单位:秒)
假设变频器设定频率为50HZ,则X轴每次送料的最大时间为0.0417秒。
3.2送料传动系统
送料传动部分采用台达ASD-B系列交流伺服系统,通过1:1传动比的带动滚珠丝杆,驱动送料工作台前进和后退。
X轴采用台达小惯量1KW伺服电机,型号:驱动器ASD-B1021-A,电机ECMA-C31010ES。
Y轴采用台达小惯量0.4KW伺服电机,型号:驱动器ASD-B0421-A,电机ECMA-C30804E7。
X轴丝杆导程:20mm;
Y轴丝杆导程:10mm;
设计要求:送料精度要求:>0.01mm;
X轴送料速度:>20米/min;
Y轴送料速度:>10米/min;
控制精度计算如下:
最小送料距离 = s / p*i
s:丝杠导程
p:每转脉冲数=10000Pulse
i:减速比=1
通过以下计算得出单个脉冲对应的送料长度,即为控制精度。
X轴最小送料距离=20mm/10000*1=0.002mm
Y轴最小送料距离=10mm/10000*1=0.001mm
以上计算,X轴和Y轴的最小送料距离均小于0.01mm,满足设计要求。
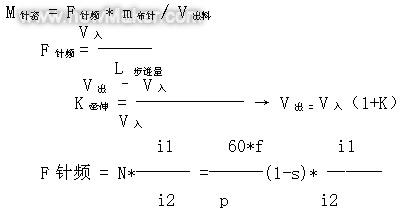
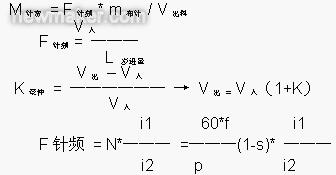
速度要求计算如下:
送料速度=f/p*s*i*60
f:控制脉波频率(最大输出频率=200K)
p:每转脉冲数=10000Pulse
X轴最大速度=200K/10000*20*1*60=24000mm/min=24m/min>15m/min,满足速度设计要求。
Y轴最大速度=200K/10000*10*1*60=12000mm/min=12m/min>10m/min,满足速度设计要求。
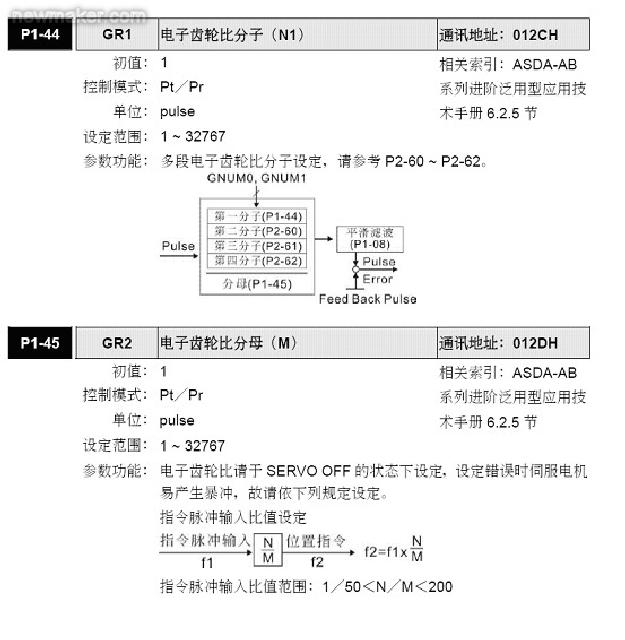
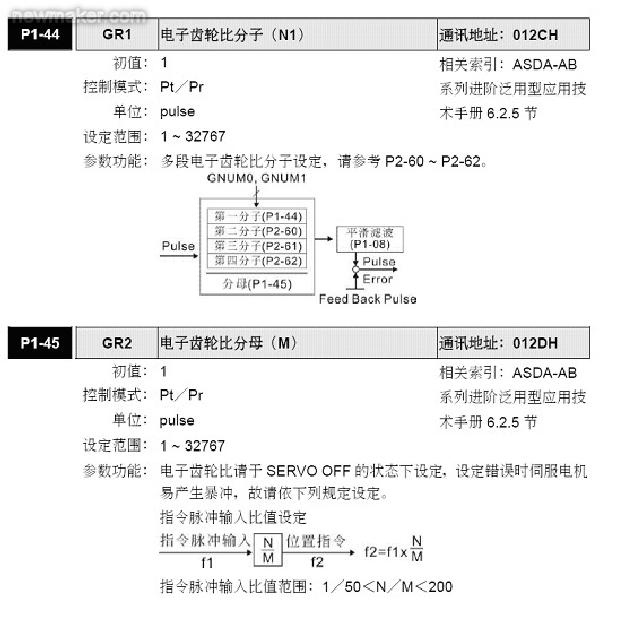
以上是不采取电子齿轮比的情况下计算所得,如果采用电子齿轮比,伺服马达工作在最大转速(3000rpm/min)情况下,最大速度:X轴可以达到60米/min,Y轴可以达到30米/min,但是,如果采用电子齿轮比,会降低送料的控制精度。
4.PLC与HMI选型
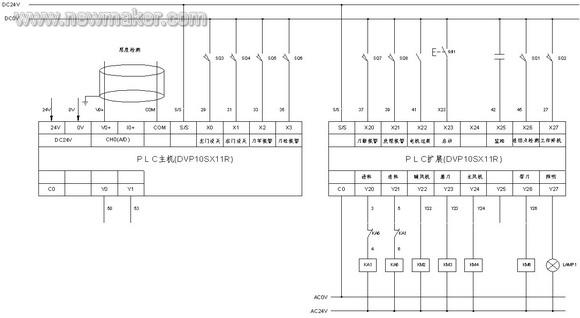
4.1输入信号统计:
X轴送料手动操作按钮:手动向左和手动向右(2点)
Y轴送料手动操作按钮:手动向前和手动向后(2点)
X轴和Y轴原点信号:2点(接近开关)
自动操作按钮:自动启动和自动停止(2点)
冲头位置信号:上位和下位(2点)---接近开关信号(NPN)
手动夹钳按钮:1点
紧急停止按钮:1点
手动/自动切换:1点(切换开关)
以上总计输入点数:13点。
考虑到DVP28SV机种输入点数有限(16点输入),把X轴左右极限开关(2点)和Y轴前后极限信号(2点)直接接到伺服驱动器上,减少硬件的扩充,降低成本,同时,也提高了系统的安全可靠性。
4.2输出信号统计:
脉冲输出(Pulse+Sign):4点(Y0,Y1)(Y2,Y3)
夹钳电磁阀:1点
冲头电磁铁接触器:1点
冲头控制接触器:1点
共7点
基于以上考虑,PLC选择DVP-28SV11T。具体功能参数为:200Kpps脉冲输出,16点输入/12点输出。台达PLC和变频器标准配置的RS485通讯口,满足变频器通讯控制的要求,也减少控制点数。
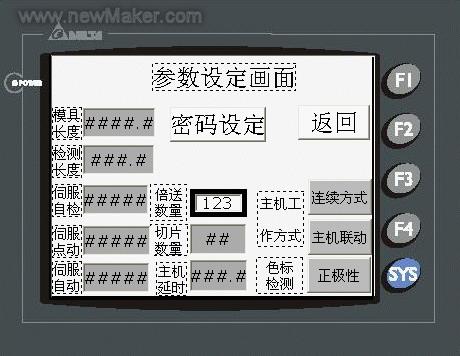
5.HMI画面与PLC程序设计
5.1部分画面示例:
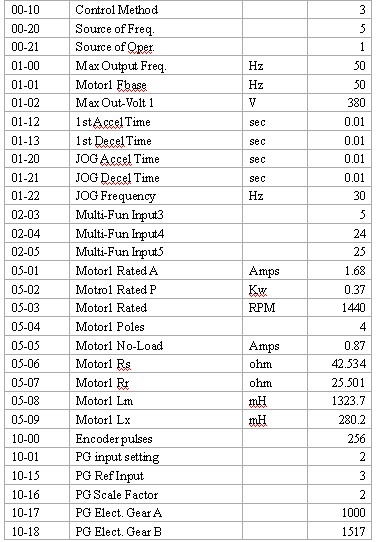
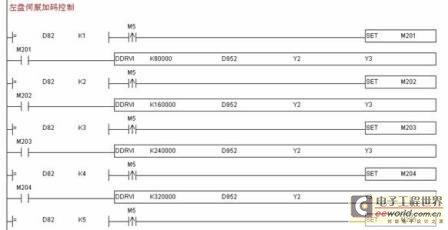
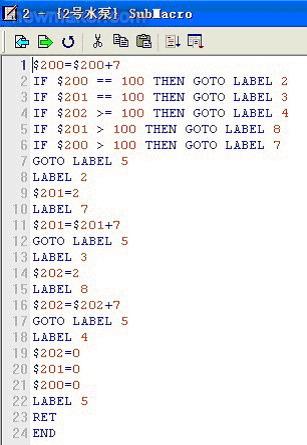
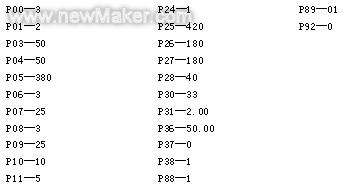
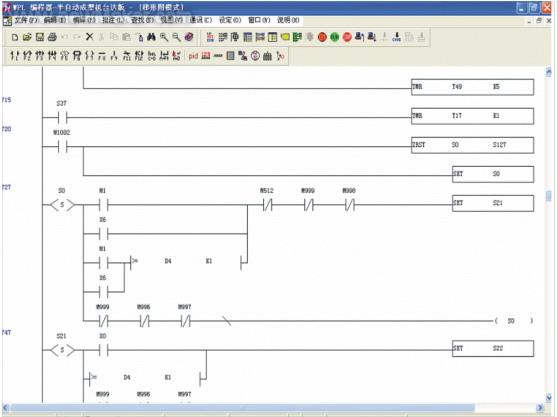
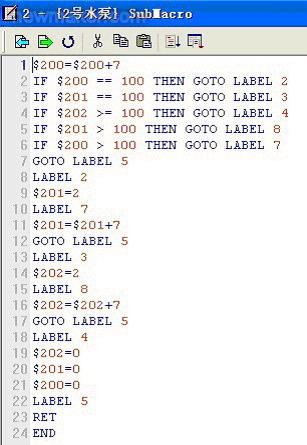
6.2 PLC程序
主程序采用步进指令实现,减少误动作的发生,简单明了,逻辑清晰。在控制精度保证上,整个程序的运算全部采用浮点数运算,减少计算误差,如:孔间距、Y轴进给距离、手动速度、自动送料的速度等的设定,在换算成脉冲数或者脉冲频率的过程中,全部采用浮点运算。经过实际验证,计算误差小于0.001mm。
其次,考虑到丝杠在正反运行中的背隙问题,本程序提供背隙的补偿参数,根据实际情况进行调整。
考虑到操作的便利性,根据现场操作习惯,在手动模式下,在任何阶段都可以切换到自动运行,大大方便操作。
7.结束语
本控制系统虽说达到预期的设计要求,但是自动化程度不是最高,用户考虑到成本问题,上料和下料全部采用人工手动的方式。如果在上料和下料工位,分别采用气动吸盘取料,伺服控制来控制物料的左右和上下移位,将大大提高设备的自动化程度,完全可以做到无人操作。
本系统主要控制元件全部采用台达机电产品,一体化的整合方案,既降低了设备的制造成本,也大大提高了系统的安全可靠性,充分体现了台达机电产品高性能和高性价比的特点,为客户赢得可观的经济效益


























 工商网监
工商网监
评论