 电子发烧友App
电子发烧友App


基于台达机电平台的冲床自动化
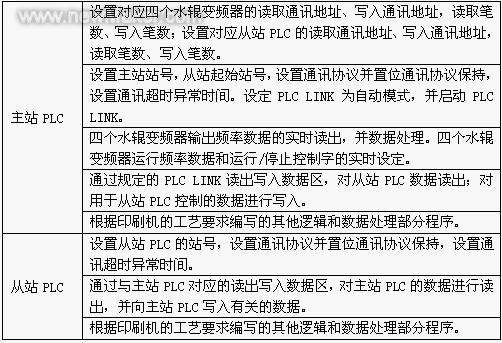
在介绍冲床加工应用的基础上论述了冲床自动化问题和曲轴式自动化冲床工作原理。最后重点讨论台达数控冲床设计技术,包括重要的台达伺服参数设计。
关键词:冲压加工 数控冲床 伺服 PLC
1 引言
金属材料领域的60~70%是板材,金属板材的大部分是经过冲压加工制成成品。冲压加工在国民经济各个领域应用范围相当广泛。例如,在宇航,航空,军工,机械,农机,电子,信息,铁道,邮电,交通,化工,医疗器具,日用电器及轻工等部门里都有冲压加工。汽车的车身、底盘、油箱、散热器片,锅炉的汽包、容器的壳体、电机、电器的铁芯硅钢片等都是冲压加工的。仪器仪表、家用电器、自行车、办公机械、生活器皿和五金制品等产品中大量冲压件。冲压按工艺分类,可分为分离工序和成形工序两大类。冲压分离工序也称冲裁,其目的是使冲压件沿一定轮廓线从板料上分离,同时保证分离断面的质量要求。
冲压分离工序使用冲床加工实现。冲裁加工在室温下利用安装在压力机上的模具对材料施加压力,使其产生分离变形从而获得所需零件的压力加工方法。冲压设备除了厚板用水压机成形外,一般都采用机械压力机。冲压件具有薄、匀、轻、强的特点。由于采用精密模具,工件精度可达微米级,且重复精度高、规格一致,可以冲压出孔窝、凸台等。冷冲压件一般不再经切削加工,或仅需要少量的切削加工。
2 冲床自动化问题
冲压虽然是高效的生产方法,但是手工单模具冲床冲压生产加工量大,在每分钟生产数十、数百件冲压件的情况下,需要在短暂时间内完成送料、冲压、出件、排废料等工序,手工单模具冲床冲压生产既满足不了其高速生产要求,又大量发生人身、设备和质量事故。冲压中的安全高效生产是一个非常大的现实矛盾问题。
采用复合模,尤其是多工位级进模的数控冲床,可在一台压力机上完成多道冲压工序,实现由带料开卷、矫平、冲裁到成形、精整的全自动生产。生产效率高,劳动条件好,生产成本低,一般每分钟可生产数百件。以现代高速多工位机械压力机为中心,配置开卷、矫平、成品收集、输送等机械以及模具库和快速换模装置,并利用计算机程序控制,可组成高生产率的自动冲压生产线。数控技术应用在冲床设备领域,使普通冲床得以升级,通过数控技术的自动控制完成冲压的功能。
基于PLC技术的高速全自动数控冲床自动完成对整体板料的上料、送料、排料及排网状废料的集成加工过程。 全自动数控冲床由通常由机床本体、上料装置、送料装置、排网状废料装置、自动化电控硬件和控制软件五大部分组成。
3 曲轴数控冲床
曲轴式冲床是最常见的冲床结构。曲轴式冲床工作原理是控制离合器的吸合动作来控制滑块也即上模的单次或连续往复运动,实现对板料的冲压加工,控制制动器实现压力机工作机构的停止。送料动作一般是由手工或间隙式机械机构完成。数控冲床的曲轴式压力机的冲压原理不变。不同的是利用PLC控制滑块的往复,即上冲模往复动作的起停和被加工板料的规则X、Y向进给送料运动,并能使这两个动作协调,即实现冲压与送料动作的同步控制。 全自动冲压加工中,两坐标工作台是关键的机械部件之一,工作台的惯性限制着工作台的送料速度和加速度。为提高工作台的送料速度,在设计时可能减小工作台的惯性。 在冲压加工过程中,X轴送料比Y轴频繁,即X轴送料次数为板料一排所冲工件个数时,Y轴才送料一次。因此设计工作台时,采用X轴在上,Y轴在下,这样工作台沿X方向送料时,X方向电机只通过丝杠带动较轻的夹钳拖板沿上导轨作X向运动。Y方向送料时,Y方向电机通过丝杠带动较重由上导轨、上电机、上丝杠和夹嵌拖板组成的机构沿下导轨作Y向运动。故能提供快捷及安全的送料过程。
数控系统软件结构 为了维修和使用方便,国际上数控系统在输入代码、坐标系统、加工指令、辅助功能及程序格式等方面逐渐形成了两种国际通用标准,ISO国际标准化标准及EIA美国电子工业协会标准。根据冲压加工特点,参考国际上常用的ISO标准。因为冲压加工中工作台送料为大量的重复动作,为了减少用户编程量,用户指令中设置了内循环、外循环、跳转指令,使用户编程量大大减少。 系统软件采用模块化结构,共有五个模块化结构,系统开机或复位后处于监控状态。这时五个功能模块可供选择。
4 台达数控冲床解决方案
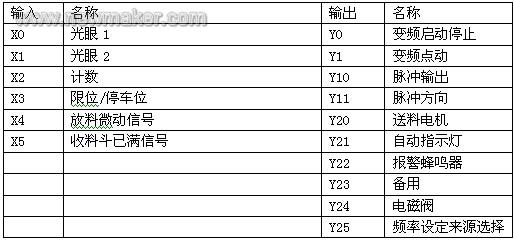
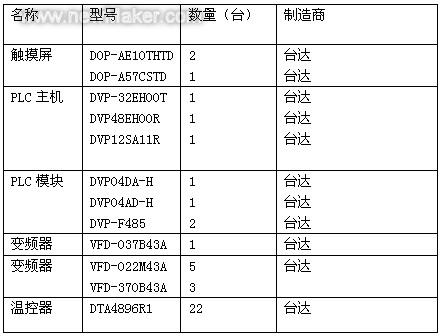
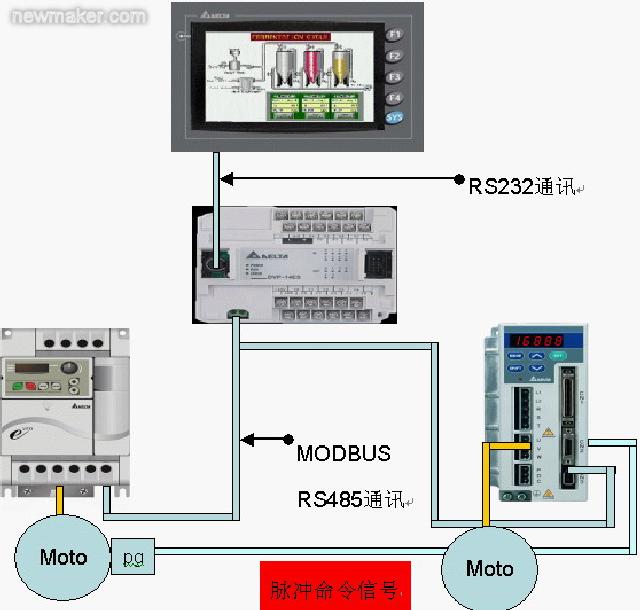
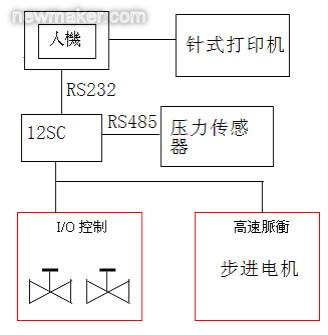
基于台达机电自动化自动化平台配置包括:台达触摸屏HMI;台达EH系列PLC;台达ASDA-AB系列交流伺服系统;台达B系列变频器。
冲床的冲头属于机械凸轮结构,电机启动后以固定的时间周期性上下运动,在该过程中伺服的运动有两种工艺自动化过程状况:小步距-在该过程中伺服运动在每次冲孔是必须走到相应的冲孔位置;大步距-由于步距太大冲头在正常冲压时,进给轴不能走到冲压位置,必须等到进给到位后方可冲压。
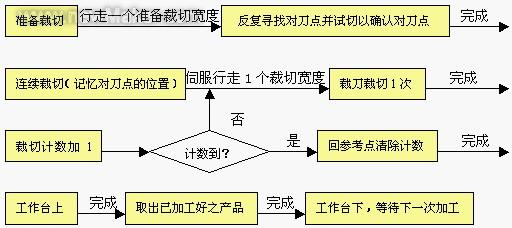
控制方式采用台达伺服寄存器控制定位模式Pr模式。通过触摸屏设置相应的距离后经过运算,转化成相应的转数和剩余的脉冲数,同时通过通讯写入对应的伺服寄存器中,并通过伺服外部启动命令进行启动。具体控制过程:
4.1 人机对话界面设计
(1)触摸屏画面设计:在触摸屏画面里,此次采取标准CNC的理念,有三种控制方式,分别为手动方式、自动方式、参考点方式。手动方式如图1所示,在手动方式时可以任意运转进给轴,有利于移动滑台,或找取装夹点。自动方式如图2所示,在自动方式时允许启动加工。参考点方式如图3所示,开机后通过执行回参考点建立机械坐标系,确定机床零点。

图1 手动方式画面

图2 自动方式画面

图3 参考点画面
(2)坐标显示:在触摸屏里可采用读取伺服状态寄存器显示机床坐标,其宏程序忽略。
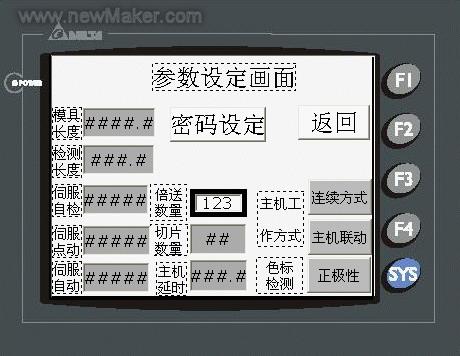
工艺画面如图4所示:在工艺画面可以设置起点坐标、步距、冲压孔数,最大步距加工速度等,对于所设步距大于最大步距时,PLC会判断,等待进给到位信号到来后冲头方可冲下。

图4 工艺画面
(3)时钟宏:在工艺画面里,通过相应的数值设定,自动转换为相应的伺服转数及脉冲数,并写入伺服驱动器。
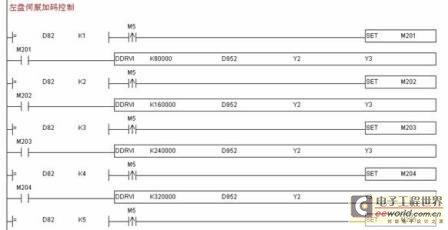
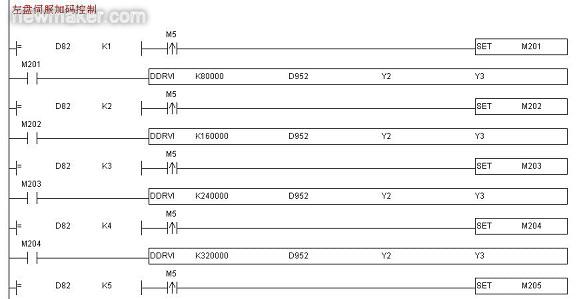
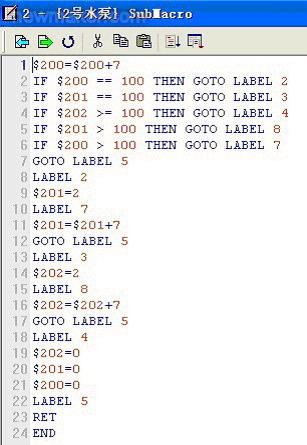
4.2 PLC程序设计
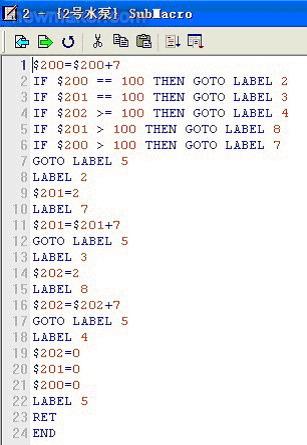
动作执行及逻辑判断PLC程序部分梯形图程序如下:

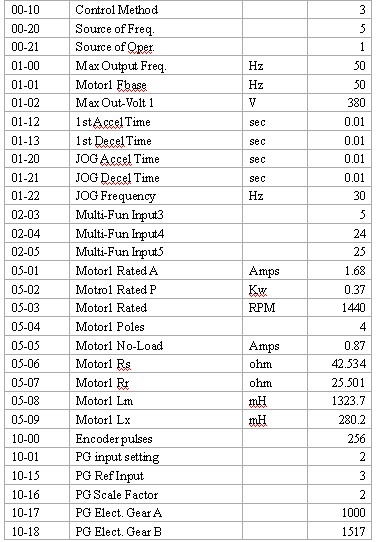
4.3 交流伺服系统参数设定
(1)电机反馈参数: 0-04 = 0(回授脉冲数);0-05 = 1(回授圈数)。
(2)定位模式Pr参数: 1-01=1(Pr控制模式)。
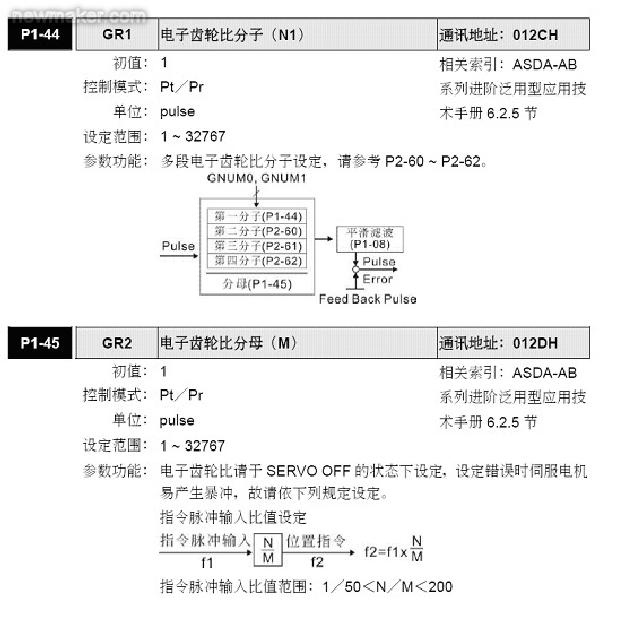
(3)电子齿轮比分子:1-44 = 5 ;电子齿轮比分母1-45 = 2 。

(4)第一段参考点速度1-48 = 20;第二段参考点速度1-49 = 30。
(5)伺服使能信号:2-10 = 1(伺服直接使能)
(6)其它伺服参数:
2-11 = 108 (pr模式出发启动信号)
2-12 = 122(反向限位)
2-13 = 137/111(jog+及pr模式寄存器选择-通讯控制)
2-14 = 138/112(jog-及pr模式寄存器选择-通讯控制)
2-15 = 106(反向方向信号)
2-16 = 127(参考点触发信号)
2-17 = 124(参考点完成信号)
2-18 = 105(伺服位置到达)
2-19 = 109 (原点复归完成)
2-20 = 107(伺服报警)
备注:2-10~2-22可参考第七章输入输出端子定义表
3-00 = 2/3(站号设定)
3-01 = 1(通讯传输率)
3-02 = 0(通讯协议)
3-05 = 2(通讯方式-485通讯)
4 结束语
通过案例设计讨论,基于台达机电自动化平台的数控冲床解决方案在应用中展示出单品牌机电一体化系统集成的巨大技术优势。应用台达单品牌机电技术平台提高数控机床的基础装备能力达到性能服务成本最优目标的综合。






















 工商网监
工商网监
评论