用该操作步骤可将项目中的每个机器人控制系统分配给一个实际应用的机器人控制系统。
2023-04-17 17:28:54 870
870 HCTL-2020 解码器及其在多关节机器人运动控制中的应用编码器位置检测通道的扩展是多轴运动控制系统开发中经常遇到的技术问题。该文详细介绍了HCTL -2020 解码器的工作原理,设计了它与DSP
2009-12-17 16:12:31
基于STFT的微创手术机器人运动控制系统
2021-06-16 10:58:21 15
15 一种基于DSP与USB总线的新型开放式移动机器人控制系统,其机器人以PC为上位计算机,用一块DSP运动控制卡对杋器人的两个步进电杋进行控制。并釆用USB总线进行上下位机之间的通讯,很好地实现了机器人
2021-04-26 16:35:5117 大力推动的科研领域,特别是双足机器人,目前已成为机器人产业重点关注的焦点之一。身为双足步行机器人控制核心模块,控制系统设计的优劣程度,直接性的决定着机器人各个方面的性能。双足步行机器人具备结构复杂、实时性要求高以
2020-04-28 08:00:0026 和拟人性,其行走控制成为当今研究的热点。步行运动模式与运动控制是影响双足步行机器人技术进步的重要问题,也是双足步行机器人成功而有效地实现稳定步行的理论基础和技术关键。
2020-04-01 17:10:0017 本文对双足竞步机器人机械结构、控制系统进行设计并对其步态规划进行研究,成果成功应用于全国机器人大赛双足竞步机器人项目竞赛中。 首先,对双足竞步机器人的自由度进行配置;根据自由度的配置把机器人的机械
2020-03-24 16:29:0012 液压双足机器人由于具有高负载、快速动态响应等优点,逐渐地应用于军事、救灾等复杂危险的任务中。设计一个稳定、高效的运动数据感知获取系统并实现数据可视化显示,对双足机器人的步态规划、运动控制以及运动状态
2020-03-19 16:03:396 双足机器人的相关研究自仿生机器人出现就同步进行。随着嵌入式芯片的发展,更高效率的控制器的出现使研究人员能够更加灵活的实现双足机器人的控制。相比其他种类的机器人,双足机器人具有运动灵活,适用性强等
2020-03-18 15:19:4728 足式机器人的运动具有足与地面非连续接触的特点,这使得它对不平路面环境的适应性较强,可以应用在探险救灾等危险的任务中。与四足及六足机器人相比,双足机器人足部与地面的接触支撑面积较小,使其具有更高
2020-01-17 14:19:5415 仿人双足机器人是机器人研究的前沿领域,是多种科技的结合,代表一个国家的技术水平。仿人双足机器人最大的特征就是双足步行,因此它的灵活性很高,可以代替人类完成危险作业。
2020-01-15 10:31:0020 双足步行机器人是真正字面意义上或狭义的“机器人”,其研究和发展代表了机器人学的尖端水平。其中最重要的概念是零力矩点(Zero-MomentPoint,简记ZMP)。本文基于双足步行机器人ZMP控制与动力学模型,取得了以下主要的研究成果: 首先,本文分析了双足机器人动态步行过程的运动学特征。
2019-12-31 16:51:0031 机器人的控制系统,就相当于人体的大脑,是机器人的核心组成部分。关于机器人的控制系统有哪些分类呢?机器人控制系统按其控制方式可分集中控制系统、主从控制系统及分散控制系统,下面为大家详细讲讲这些系统。
2019-11-04 08:45:3323219 控制系统作为四足仿生机器人最重要也是最基础的组成部分,其性能的好坏直接对四足仿生机器人运动控制效果产生巨大的影响。在机器人研究的早期,控制系统一般采用单级处理器的集中控制模式,利用一台运算速度快
2019-09-27 08:00:000 据调查,目前将DSP应用于机器人控制系统的方案,通常是将机器人位置控制中运动学计算任务交给PC机完成,PC机将计算结果(机器人各关节的转角)下载到以DSP芯片为核心的电机控制器,实现机器人控制眼演
2019-06-20 08:02:001637 
双足步行机器人---直立行走,其有着良好的自由度、动作灵活、自如、稳定。双足机器人是一种仿生类型的机器人,能够实现机器人的双足行走和相关动作。
2018-08-10 09:26:0315724 本文首先介绍了伺服运动控制系统主要特点,其次介绍了伺服运动控制系统工作原理,最后从机器人移动方式的选择与结构设计、移动机器人运动控制系统及机器人的控制系统设计三个方面来详细介绍机器人伺服运动控制系统设计,具体的跟随小编一起来了解一下。
2018-06-01 14:19:3614371 针对轮式移动机器人越障能力不足的问题,设计出了一种兼具轮式和足式移动机构特点的圆弧腿仿生六足机器人。完成了基于飞思卡尔MC568037型DSP及CAN总线的机器人控制系统的设计;对机器人的运动步态
2018-03-16 14:53:473 ,导致难以控制;履带式移动平台移动速度慢、转向时对地面破坏程度大;跳跃式和蛇形式在复杂环境和机动性等具有独特的优越性,但运动平稳性及承载能力都明显逊色于轮式机器人。 轮式移动机器人速度快,运动平稳而灵活,承
2018-01-30 15:06:383 的不断发展,尤其是高速度数字信号处理器DSP 的出现,从根本上解决了嵌入式系统运算能力不足的问题,并为机器人运动控制系统的改进提供了新的途径。该文正是从这一点出发, 选用控制能力很强的DSP芯片TMS320LF2407A作为机器人运
2017-10-23 14:36:281 焊枪的工业机器人。工业机器人的运动控制系统涉及数学、自动控制理论等,内容很多。要在较短的篇幅中,全面而系统地介绍工业机器人的运动控制系统,实在是非工业机器人控制专业人员所能及的事情,因此,本章内容是从焊接机
2017-10-17 11:07:248 我们今天的文章:机器人控制技术详解: 机器人控制系统的特点 机器人的结构采用空间开链接结构,其各个关节的运动是独立的,为了实现末端点的运动轨迹,需要多关节的运动协调。所以,其控制系统要比普通的控制系统复杂得多
2017-09-19 18:29:2810 的学科涵盖机械、电子、生物、传感器、驱动与控制等多个领域。 世界著名机器人学专家,日本早稻田大学的加藤一郎教授说过:机器人应当具有的最大特征之一是步行功能。双足机器人属于类人机器人,典型特点是机器人的下肢以刚性构件通过转动副
2017-09-16 09:58:2747 管道检测机器人控制系统设计与运动研究_蔡辉
2017-03-19 11:30:431 工业机器人运动控制系统的设计与实现_施文龙
2017-01-13 21:40:361 仿人机器人一直是自动控制领域研究的热点。在模仿人类进行迈步行走时,由于仿人机器人的重心经常要处于中心线以外的区域,使得它的身体很难保持站姿平衡,能够稳定地实现双足行走是仿人机器人研究的重点也是难点。
2016-09-19 10:53:1947 基于DSP的清洗机器人模糊控制系统研究2008。
2016-04-05 10:30:1212 摘 要:基于机器人复杂的决策控制和步态管理,采用了个人数字助理(PDA)和数字信号处理器(DSP)组合,并以Windows Mobile作为软件平台。具体分析了控制系统的硬件设计和软件设计方法。真实环境中的实验及比赛结果证明,该控制系统可以实现机器人的复杂控制。 关键
2011-03-01 00:40:0460 基于CAN总线和双传感器仿人机器人运动控制系统研究
机器人研究是自动化领域最复杂。最具挑战性的课题,它集机械。电子。计算机。材料。传感
2009-10-10 08:57:29761 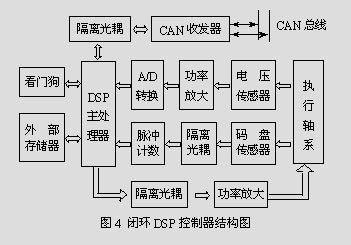
以IPC+DSP 作为六轴工业机器人的控制器, 设计了一种基于可编程多轴控制器PMAC(Programmable Multi-Axis Controller)的开放式机器人控制系统。系统采用双微机分级控制方式和模块化结构软
2009-09-25 16:54:1339
 电子发烧友App
电子发烧友App











 工商网监
工商网监
评论