无刷主流电机的驱动控制方式主要分为有位置传感器和无位置传感器的控制方式两种。由于在四轴飞行器中的要求无刷直流电机控制器要求体积小、重量轻、高效可靠,因而采用无位置传感器的无刷直流电机。##无刷
2015-01-12 13:54:28 15941
15941 
ADUC7026 Keil环境下,能不能用USB直接下载hex文件到开发板上,打开ARMWSD.EXE后为什么点击start程序就死了,没反应,无法下载!
2024-01-15 07:43:46
用aduc7026写了简单的timer1中断方波发生程序,发现频率最高只能达到120+k,定时器设的时间再短后频率不上升。附件中是整体的工程文件。设置的使用系统时钟41.78M,不分频。T1不分
2018-09-11 10:53:05
ucos ii移植在ADuC7026(ARM7内核)。
2012-07-29 18:51:23
我的 ADuC7026 微控制器在 125°C 下运行时不断重启、这是正常行为吗?工作温度可以提高吗?
2024-12-19 07:24:02
ADI公司ARM7内核的芯片ADuC7026,源代码例程
2012-07-29 18:43:23
*********************************************************************/ #include// Include ADuC7026 Header File
2018-09-13 14:12:27
各位斑竹你们好,我用aduc7026扩展了外部ARM,ARM型号CY62256LL-70SNC,现在正用keil3 V3.22和mIDAS-Link RDI 进行调试,请问我该怎么设置keil?以下
2018-11-19 09:42:47
本帖最后由 gk320830 于 2015-3-9 15:31 编辑
请问在aduc7026bstz62开发板上可以直接插s3c44box处理器么?谢谢大家了
2011-11-30 18:15:57
=FIQ_Handler; FIQEN = 0x200;while(1){}}
核心接收测试代码是这样的,主机我换过3种不同型号的开发板,通过I2C和aduc7026通信,连续发送N byte
2024-01-12 06:03:10
详解微处理器和微控制器区别
2021-01-29 06:39:39
微处理器的结构是由哪些部分组成的?微处理器的代码是如何执行的呢?
2022-02-28 09:25:10
控制电路,飞行器支架(购买)。软件部分:按键中断和与无线通信,电机驱动算法。机械部分。2013年12月1日 -2013年12月7日 了解mcu,设计核心板,调试电路。2013年12月7日 -2013年
2013-11-03 23:25:05
ARM7核的aduc7026成功移植了ucos-ii,做了一个从i2c中断程序,与2112 通信100k速率正常。但是如果2112主机用i2c地址搜索功能,35k速率没有问题,可以找到7026的从机
2022-05-07 11:08:41
KIT DEV ADUC7026/7027 QUICK PLUS
2023-03-30 11:48:05
KIT DEV FOR ADUC7026/7027
2023-03-30 11:48:23
设计RISC微处理器需要遵循哪些原则?基于FPGA技术用VHDL语言实现的8位RISC微处理器
2021-04-13 06:11:51
PSoC微处理器在电动车无刷电机控制器上有哪些应用?
2021-05-14 06:53:15
导线和无刷电机驱动器,以尽可能减少电磁干扰对飞行控制器带来的影响。在整个飞行控制系统中处理器是最核心的器件,主要负责解码遥控接收器收到的PPM信号,采集多个传感器数据并融合多种数据进行飞行器姿态解算,输出PWM
2016-05-23 15:41:22
的传感器都使用过,也有自己的驱动库,都容易上手项目描述:四旋翼飞行器飞行控制器===================# 功能* 由开发板的传感器(气压+六轴陀螺仪+磁力计+GPS)获取的数据,通过运行
2016-03-23 13:48:09
申请理由:我想用stm32制作一个四旋翼飞行器,。。我学习过51单片机,飞思卡尔公司的K60和MC9S12单片机,分别是32位和16位处理器,并参加过2015年全国大学生飞思卡尔杯智能车竞赛并获得
2015-08-11 10:00:45
,并融入了人工智能,使其发展趋于无人机,智能机器人。四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。四轴飞行器的平衡控制系统由各类惯性传感器组成。在
2015-08-11 10:30:35
申请理由:我们是在校大学生科研兴趣团队,正在设计制作四轴无人 项目。现在四轴无人机一般通过遥控器或者电脑上位机控制飞行。所以,我们希望通过申请蓝牙开发套件,用手机蓝牙控制四轴飞行器的运行,对飞行器
2015-10-09 14:16:12
,刚好抵消反扭矩,巧妙的实现了平衡, 但是实际上由于电机和螺旋浆本身的差异,造成我们无法做到四个电机产生相同的升力,这样飞行器起飞之后就会失去平衡。 PID控制器 PID控制器通过PID三个参数来对被控
2019-07-14 05:00:00
通过滤波算法,得到准确数据,通过四元数算法解算飞机的实时姿态,最后利用PID自动控制原理实现自稳。主处理器为MSP430F5308,该款处理器,性能强大,运行速度快,有利于实现实时控制,而且价格适中
2014-12-31 11:30:44
。AD7294的优点是集成度高、成本低且可靠性高,但缺点是需要使用外部微控制器(MCU)来实现PA监控功能。ADuC7026与AD7294具有很多相同的优点,主要的区别是ADuC7026包含MCU。另外
2019-07-05 07:29:38
四轴飞行器的结构是如何构成的?四轴飞行器的基本飞行原理是什么?一种基于四轴飞行器的双闭环PID控制算法
2021-05-19 06:20:42
四轴飞行器的发展背景;四轴飞行器的研究现状;四轴飞行器的研究意义;哪位大神知道的说下,想了解啊
2012-07-27 14:09:48
的问题也就迎刃而解了。所以以下重点讨论空中姿态控制问题。为描述方便起见,由下图简单示意,后续描述皆以图为参考:四轴飞行器的一切控制行为都是通过调整四个动力电机的转速来实现的。首先,为了克服飞行器自旋,必须相邻
2019-04-05 07:00:00
分享出来,希望大家一块出谋划策,万一搞成了呢?结构:由上面动图可以看出,这个飞行器从结构上主要分三大部分,为了描述方便,以下就用:控制舱、驱动舱、随动舱来称呼。由立体外观图可以看出,实现动图功能的核心在于
2019-03-10 13:24:30
分享出来,希望大家一块出谋划策,万一搞成了呢?结构:由上面动图可以看出,这个飞行器从结构上主要分三大部分,为了描述方便,以下就用:控制舱、驱动舱、随动舱来称呼。由立体外观图可以看出,实现动图功能的核心在于
2019-03-10 12:45:46
一号实验板控制四个螺旋桨直流电机旋转,当四个电机同向旋转时,飞行器平稳上升,当相邻两电机转向相反时,飞行器旋转,当前两个电机转速相同,后两个电机转速相同时,可实现飞行器前后飞行。用蓝牙模块遥控飞行器,用
2013-10-28 10:26:53
四旋翼的旋翼对称分布,4个旋翼处于同一高度水平面上,他们的结构和半径都相同。通过改变四个电机的转速就可以实现升力的变化,从而控制飞行器的姿态和位置。1)当四个电机同时加速或同时减速时,飞行器会垂直
2021-09-13 06:54:55
四旋翼微型飞行器是一种以4个电机作为动力装置.通过调节电机转速来控制飞行的欠驱动系统;为了实现四旋翼微型飞行器的自主飞行控制,对飞行控制系统进行了初步设计,并且以C8051F020单片机为计算控制
2013-11-28 09:29:12
不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力不稳定,所以需要一种能够长期确保稳定的控制方法。四旋翼飞行器
2019-02-18 15:02:22
ADAMS与MATLAB仿真的多回路PID位置跟踪控制的模型,但该模型的实现较为困难,需运行速度较快的处理器。文献[5]给出了双闭环轨迹跟踪与控制的方案,提高了飞行器追踪地面移动目标的鲁棒性;文献[6
2018-12-03 19:35:50
、电机运行稳定可靠,实现了电机连续运转。 近年来,四轴飞行器的研究和应用范围逐步扩大,它采用四个无刷直流电机作为其动力。无刷直流电机为外转子结构,直接驱动螺旋桨高速旋转。 无刷主流电机的驱动控制方式主要
2018-10-08 15:13:09
目前有微型四轴,也有像小米、大疆的四轴飞行器。
今天无刷的先不谈,只谈有刷的空心杯电机。
1、目前用在四轴飞行器上的空心杯电机电机有哪些型号?
2、每种型号空心杯电机的最大升力好多、消耗电流多少?
电机与桨叶怎么选型,有什么关系,升力应当怎么计算?
2023-11-06 06:54:53
四轴飞行器由以下部件组成:1、飞控系统(包含GPS等各种传感器),用于控制飞行器,是四轴上最重要的部件;2、电调,接受飞控信号,驱动电机旋转并实现调速;3、电机,驱动螺旋桨旋转;4、螺旋桨,旋转
2019-04-01 06:36:40
允许飞行器通过改变电机转速获得旋转机身的力,从而调整自身姿态。1 四轴飞行器的结构与基本飞行原理四轴飞行器结构主要由主控板和呈十字交叉结构的4个电子调速器、电机、旋浆组成,电机由电子调速器控制,主控板
2016-01-15 16:42:28
小弟虽然没接触过四轴飞行器,但我想也没大家说的那么难吧!四轴飞行器无非就是给四个电机驱动,再加上角度传感器保持稳定。用PID算法实现自动控制。我觉得并不难啊,用1T周期的51单片机就能实现。主要
2013-08-30 20:21:48
,十字模式意味着首尾的方向会指向某个螺旋桨,而X字模式则是指首尾方向指向两个螺旋桨中间。大多数飞行器采用的是X字模式。X字模式相对于十字模式来说,控制起来更加困难,但动作的灵活性会更高。图 1.1
2015-10-23 11:21:59
本人最近参加虚拟仪器大赛,用FPGA实现飞行器的控制,该怎么写?求大神指教!
2014-11-19 19:09:51
这段时间正在学习stm32处理器的使用,为了巩固所学知识,初步熟悉STMF103处理器和外设的使用,打算制作一架微型四轴飞行器,由于这个项目对我来讲还是有难度的,网上也看到一些不太成功的案例,因此
2021-08-06 09:04:45
文章目录一、系统组成模块1、上位机 (PC)2、遥控器系统3、飞行器机体系统3.1 接收遥控器无线数据, 并发送飞行数据到遥控器无线通信模块Nordic NRF24L013.2 采集传感器数据并进
2021-11-11 09:19:06
基于AD7656-1和ADuC7026评估电源时序控制影响
2021-03-16 15:19:02
计算目的而设计的芯片。这种芯片往往是个人计算机和高端工作站的核心CPU。最常见的微处理器是Motorola的68K系列和Intel的X86系列。早期的微控制器是将一个计算机集成到一个芯片中,实现嵌入...
2022-02-09 07:48:39
本文描述了一个简易四轴飞行器系统的设计实现,整个方案分为遥控控制板各飞行控制板两部分,通过2.4G无线模块进行控制通信,飞控系统采用IMU系统获取姿态信息根据反馈控制算法进行电机控制从而实现飞行控制
2021-03-04 06:03:00
怎样去使用STMF103的处理器和外设呢?怎样去设计一种基于STMF103处理器的微型四轴飞行器呢?
2021-11-09 07:07:08
我想做一个四旋翼飞行器,该用什么驱动器和电机呢?
2016-01-21 15:57:44
1.选题的背景与意义1.1四旋翼的发展背景早在1907年,由Breguet-Richet发明的世界上第一家四旋翼飞行器升空。四旋翼飞行器通过平衡4个螺旋桨的升力及力矩来实现稳定盘旋和飞行。但由于构造
2021-08-06 08:22:07
利用LabVIEW(或其他软件)实现地面控制站的人机接口程序;实现在线飞行状态监测、显示飞行数据和报警信息;实现地面站对无人机的控制接口,包括命令控制台、飞行参数显示、无人机飞行航迹显示,并能根据任务对航迹进行实时规划;还要能利用3D模型动态显示飞行器的情况
2013-05-12 22:14:13
建模和控制器设计带来很大难度,但是可以进行适当简化来实现。# 建模分析__四轴飞行器的原理__四轴飞行器通过调节四个电机的转速实现空间六自由度的运动。设飞行器前方为X轴方向,右侧为Y轴方向,下方为Z轴
2019-08-06 17:12:20
请问大神 ADUC7026有没有芯片唯一id号程序里怎么获取芯片id号呢
2018-08-08 06:59:50
ADUC7026 Keil环境下,能不能用USB直接下载hex文件到开发板上,打开ARMWSD.EXE后为什么点击start程序就死了,没反应,无法下载!
2018-11-16 10:07:02
四轴飞行器电源控制采用的什么机制?
2023-10-08 10:18:22
在keil中找不ADUC7026的型号,该怎么编译
2018-09-25 14:23:21
不用积分电路,目前有个Aduc7026单片机(内置AD、DA、PLA等),将方波送入7026后怎么处理(要实现同频率)
2013-04-01 22:04:23
请问您做过飞行器的驱动电路吗?(直流无刷电机)
2012-09-08 12:17:18
和一个尾桨。他们是通过控制舵机来改变螺旋桨的桨距角,从而控制直升机的姿态和位置。四旋翼飞行器与此不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。由于飞行器是通过
2016-08-06 15:19:13
基于专用处理器的电机驱动方案是电机驱动领域的技术发展趋势,传统高性能电机驱动通常需要设计者对于旋转电机本体和控制算法都有非常深刻的理解,并且常常被大量的外围电路如霍尔整形电路、电源系统、无传感器方式
2019-07-26 08:05:59
飞机的梦想。智能飞行器可以使一切变得更简单,我们的智慧正慢慢地改变着这个世界。该四轴飞行器使用Contex-M4/M3内核的32为ARM微处理器,其中包括STM32F427VIT6主控制器
2018-04-24 15:32:24
基于ADuC7026的网络化数据采集系统设计:设计了一种基于ADuC7026的网络化数据采集系统,以集成ARM7TDM I内核的精密数据转换器ADuC7026和网络控制器RTL8019AS来构造一个基于以太网的嵌入式
2009-09-25 15:52:26 39
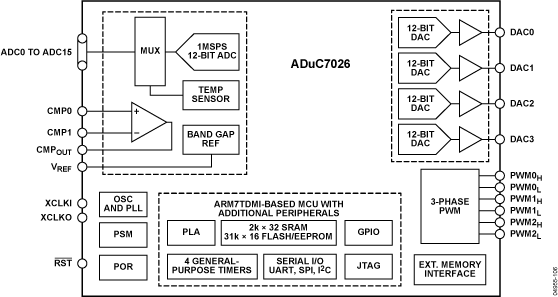
39 ADuC7026为完全集成的1 MSPS、12位数据采集系统,在单芯片内集成高性能多通道ADC、16位/32位MCU和Flash®/EE存储器。ADC具有多达12路单端输入。 另外还有4个ADC
2023-07-17 10:48:28
什么是微处理器
CPU是Central Processing Unit(中央微处理器)的缩写,它是计算机中最重要的一个部分,由运算器 和控制器组成。如果把计算机比作
2009-06-17 07:32:361948 ADuC7023/ADuC7024/ADuC701925/ADuC7026在单芯片内集成1MSPS、12位多通道高性能ADC的数据采集系统、16位32位MCU和FLASH/EE存储器。ADC具有多达
2011-02-08 12:33:13171 微处理器温度控制模拟Ⅵ的运行,可以通过以下步骤进行。通过本章创建的微处理器温度控制模拟控件,可以模拟微处理器温度控制过程,以及微处理器温度变化随处理过程定时参数变
2011-06-20 09:28:38811 超长指令字VLIW微处理器架构采用了先进的清晰并行指令设计。VLIW微处理器的最大优点是简化了处理器的结构,删除了处理器内部许多复杂的控制电路,它能从应用程序中提取高度并行的
2011-09-26 14:12:401570 
ADuC7026和12864连接注意的问题
2013-09-26 14:45:4619 四轴飞行器是近来在专业与非专业领域都非常火爆的技术产品。本专题主要给大家介绍四轴飞行器的必备知识,包括四轴飞行器的入门基础,四轴飞行器飞行原理,四轴飞行器源代码及其原理图设计还有具体应用中的一些设计小经验分享及四轴飞行器DIY制作,充分翔实的向大家描述了四轴飞行器设计中的技术。
2015-05-08 15:44:14

An Application of 4-Rotor Unmanned Aerial Vehicle: Stabilization Using PID Controller四轴无人飞行器的应用——使用PID控制器实现稳定性
2015-11-30 10:48:3457 应用嵌入式技术、无线传输技术和图像处理技术,设计目标搜索飞行器,为防灾救灾提供技术服务。系统包括手持终端和飞行器,采用ARM11架构的 S3C6410微处理器,移植Linux操作系统。飞行器携带
2015-12-18 16:03:0511 四轴飞行器控制原理,模型设计,控制,仿真。
2016-04-28 11:45:518 滤波在飞行器姿态获取系统中的实现滤波在飞行器姿态获取系统中的实现滤波在飞行器姿态获取系统中的实现
2016-06-08 17:29:360 STC15W401AS-实现四轴飞行器无刷电机的电调控制,包含:参考程序和电路
2016-07-13 17:31:46157 内执行任务。因此四旋翼飞行器具有广阔的应用前景,吸引了众多科研人员,成为国内外新的研究热点。 本设计主要通过利用惯性测量单元(IMU)姿态获取技术、PID电机控制算法、2.4G无线遥控通信技术和高速空心杯直流电机驱动技术来实现简易的四轴方案。
2017-11-29 17:56:0118738 
针对四旋翼飞行器,设计并实现了一种基于 STM32 的微型飞行控制器. 以新型 ARM Cortex-M3 内核微处理器 STM32 作为计算控制单元,对飞行控制器进行了模块化设计,包括主控、惯性
2017-12-05 10:52:4733 四轴飞行器是一种四旋翼的飞行器,其四个螺旋桨都是通过无刷电机驱动产生上升力,X形的布局允许飞行器通过飞控系统改变无刷电机转速,起到了稳定飞行姿态的作用。近年来,无论是军事科技上还是民用航拍市场,甚至
2018-02-01 15:06:233 四轴飞行器又称四旋翼飞行器、四旋翼直升机,简称四轴、四旋翼。这四轴飞行器(Quadrotor)是一种多旋翼飞行器。四轴飞行器的四个螺旋桨都是电机直连的简单机构,十字形的布局允许飞行器通过改变电机转速获得旋转机身的力,从而调整自身姿态。
2018-03-27 18:50:5817251 来源为DJI2312无刷电机,通过控制PWM的增减量实现电机的调速。采用光流实现对飞行器飞行高度的准确控制,采用摄像头使飞行器在A区降落和识别寻找小车。通过对飞行器飞行参数采集和处理,运用相应的控制算法,实现飞行器的自主飞行、悬停、降落
2018-12-24 08:00:0022 电子发烧友网为你提供ADI(ti)ADUC7026相关产品参数、数据手册,更有ADUC7026的引脚图、接线图、封装手册、中文资料、英文资料,ADUC7026真值表,ADUC7026管脚等资料,希望可以帮助到广大的电子工程师们。
2019-02-22 14:51:34
对四旋翼飞行器悬停困难的问题,从外力平衡与外力矩平衡两点出发,根据牛顿一欧拉方程对悬停状态下的飞行器建立动力模型,利用PID控制理论进行回路控制,设计了四旋翼飞行器的悬停算法。现场飞行测试结果为飞行器在水平范围±2 m、垂直范围±l m的空间范围内漂移,实现了飞行器的悬停功能。
2020-04-14 08:00:006 ,那么微控制器就是大脑。微处理器和微控制器通常具有相同的功能,因为它们具有共同的特征,并且它们是专为实时应用而设计的,因此经常相互使用。但是,他们又有相当大的差异。
2020-06-29 10:02:0610788 以微小型飞行器为控制对象,设计了一种基于Xscale+FPGA的双芯片微小型数字控制系统.该系统用基于Xscale架构的微处理器处理导航算法和控制算法,用FPGA处理外部信号核心.选择嵌入式
2021-01-22 15:08:0010 UG-669:评估ADuC7026微转换器
2021-05-25 20:45:0910 评估ADuC7026/ADuC7027的开发系统为完全集成的1 MSPS、12位数据采集系统,在单芯片内集成高性能多通道ADC、16位/32位MCU和Flash/EE存储器。用于ADuC702x精密
2021-06-06 09:27:4410 电子发烧友网为你提供ADI(ti)EVAL-ADUC7026相关产品参数、数据手册,更有EVAL-ADUC7026的引脚图、接线图、封装手册、中文资料、英文资料,EVAL-ADUC7026真值表,EVAL-ADUC7026管脚等资料,希望可以帮助到广大的电子工程师们。
2021-08-31 17:00:04
多旋翼飞行器设计与控制的底层飞行控制
2021-09-14 09:36:140 电子发烧友网站提供《TLC5916单线控制–消除LED驱动器的微处理器控制.pdf》资料免费下载
2024-10-11 09:11:121 电子发烧友网站提供《TLC5940单线控制–消除集成LED驱动器的微处理器控制.pdf》资料免费下载
2024-10-12 10:26:573 电子发烧友网站提供《AN-744: ADuC7026评估板参考指南.pdf》资料免费下载
2025-01-14 15:08:220
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论