 电子发烧友App
电子发烧友App


1、引 言
系留气球作为一种浮空平台,其基本工作原理是利用气球囊体内的填充气体在空气中产生的浮力搭载有效载荷,并通过系留缆绳的拖曳实现在空中的长时间驻留,其在通信、公共安全、地质勘探、军事用途和商业活动等多种场合有着广阔的应用前景。系留气球系统是一项复杂的系统工程,涉及到气动、通讯、计算机、传感器、材料和有效载荷等多个学科。
压力调节系统是系留气球系统中一个重要的分系统,它的主要功能是根据气球系统的不同工作模式和外部条件,通过控制各个囊室充气的风机和放气的阀门来调节各部分的内外压力差,使气球保持既定的气动外形,以期达到平稳带载浮空的目的。压力调节系统的正常运行是系留气球平稳浮空的前提和保障,执行器(主要包括风机、阀门、撕裂幅等)的错误动作有可能致使气球因外形变化而导致姿态失衡,以及因内外压差过大而导致气球囊体爆裂,甚至球皮被错误撕裂等严重故障,这对于整个气球任务系统而言都是致命的。因此在进行压力调节系统的软、硬件设计时,既需要严格保证各执行机构在既定模式下动作的准确性和有效性,又需要最大限度地提高自身运行的可靠性。
压力调节系统在上述工作模式时,对各个执行机构所需的控制输入项和控制准则不尽相同,而且还要考虑到针对各执行机构的控制,气动总体设计师可能在系统设计初期无法给出完整而准确的输入条件,从而带来调试过程中的种种改动,所以必须对系留气球压力调节系统进行建模分析,以期找到一种安全、有效、可靠且可扩充的控制策略,否则难以保证系统设计能完全满足要求。
建模时,首先要把压力调节系统中所有工作模式Mi下所有可能影响执行机构动作的输入条件D归类,并将输入条件类之间的关系解耦合,把输入条件类之间变得相互独立。此时,对于任意的输入条件类Di和Dj从概率学角度描述应该满足:
然后将同一类的输入条件Di全部分解为若干个互斥的Di1,Di2,…,Dik,且为遍历分解,即把每个类的各种情况都归纳到此条件中,此时从概率学角度描述应该满足:
至此把可能影响执行机构动作的所有输入条件D全部分解为“类间独立,类内互斥”的子条件Dik,为控制传递函数的建立,创造了可使用的输入变量。
针对任何一个执行机构Q(k),如果决定其动作的输入条件有D1,D2,…,Dm,则对于不同的工作模式Mi,其传递函数总可以表示为:
式中:Mi代表控制模式中的第i种,当系统工作在第i种工作模式时,对应的Mi为TRUE,否则为FALSE;代表对应输入条件的逻辑最小乘积项。
根据该模型建立的压力调节系统,将任务书中不同模式下各执行机构的各种复杂控制条件变成了一个个易于表述的逻辑函数表达式。这样,在工程实施时该建模就有以下几个方面的优势:
(1)该模型把所有的输入条件进行了分类、归整,利用逻辑函数化简方法(如代数法、卡诺图法、系统化简法等),易于发现其中的遗漏条件、不合理条件、自相矛盾条件,甚至是错误条件,特别是对于调试过程中临时改动或增加的输入条件。
(2)该模型把众多可枚举的工作模式和输入条件进行一一对应,把复杂的系统任务分解为若干个模块级独立小任务的组合,易于工程化的实现,降低了各功能模块之间的耦合,减少了软件出错的概率。
(3)基于该模型设计的控制系统,逻辑清晰,流程顺畅,易于实现软、硬件的扩充设计。特别是模型逻辑最小项中任意项(或称约束项)的巧妙使用,对于实现诸如滞环控制等功能将带来极大方便。
2 、压力调节系统设计
下面结合某型系留气球的实际工程设计,简要介绍一个压力调节系统的设计实例。
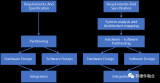
2.1 硬件设计
由于系留气球压力调节系统是一个多传感器输入、多执行机构输出的复杂系统,硬件设计时,既要考虑系统运行平台、传感器选型、输入/输出接口设计等电性能指标,更重要的是必须考虑安全性设计、可靠性设计、电磁兼容性设计等方面,同时还要兼顾考虑远程下载程序的设计、有效载荷系统等多方面因素的影响。系留气球压力调节系统的硬件设备分布在球上和球下两部分。两部分设备通过系留缆绳中的光纤和无线通讯设备进行数据交换。
首先要确定的是压力调节系统运行平台的选择。由于球上有大量的传感器设备和执行机构,接口众多,而且考虑到远程更新程序的需要,故选择基于PC104总线架构、网络通讯机制和VxWorks实时操作系统的双冗余计算机作为球上信息处理平台。该平台具有方便集成开发,可靠性高,体积重量小,支持远程下载程序等特点,非常适合作为球上设备平台使用。相对球上而言,球下的设备相对单一,仅为一台6U结构的CPCI计算机提供气球测控系统的人机界面。
传感器是压力调节系统中输入信息的重要来源,其中可能使用到差压传感器、风速风向仪、三维姿态传感器、GPS/北斗机、缆绳拉力传感器、温湿度传感器等不同类型的传感器。在传感器设计选型时,应从以下几个方面权衡考虑:
(1)各传感器的量程、分辨率、响应速度等指标要符合系统对被测量参数的要求;
(2)各传感器的环境适应性(包括温湿度、海拔高度、气压、电磁环境等);
(3)各传感器的输出量优选数字信号,且通讯接口优选抗干扰能力强的RS 422或RS 485接口;
(4)各传感器的供电、尺寸、体积、重量等指标要合理。
即使对于使用系留缆绳内光纤通讯的系统而言,无线通讯设备也是应急时球上球下通信的重要保障。根据需要,其间传输的既有一般的控制命令和回馈命令,也可能包括视频监控图像,因此在选择无线通讯设备时要综合考虑通讯距离、频段、带宽、与负载设备的电磁兼容性等因素。同时还要根据气动总体输入的气球最大姿态偏移和位置飘移确定球上球下通讯天线的覆盖范围,以保证在极限情况下两处通讯的正常进行。通讯设备的天线一般遵循“球上全向,球下定向”的原则,保证通讯信号的有效重叠覆盖。
电磁兼容设计是保证系统正常工作的重要前提,特别是球上设备中的整流/逆变电源,以及压力调节系统中的机电设备、无线通讯设备、有效负载系统、空间电磁辐射和接地电阻大(甚至浮地)等诸多因素交织在一起,导致球上设备工作的电磁环境异常复杂,所以必须在系统设计初期就把电磁兼容设计作为一项系统工程,从干扰源、干扰对象和干扰路径三个方面分析人手,广泛采用屏蔽、加装磁环、地线单点等电位技术手段。
2.2 软件设计
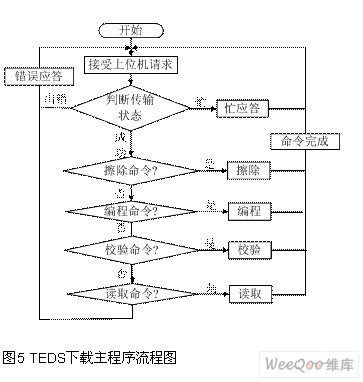
考虑到通讯中断等极端情况,除了系统工作在人工控制模式时,压力调节系统的绝大部分控制策略都是由球上计算机编制软件完成的,所以球上压力调节控制软件既能进行自主压力调节控制,又能根据球下操纵台的命令进行控制。
控制软件首先根据外部输入的信息判断当前的工作模式。比如判断缆绳断裂必须同时满足以下五个条件,否则不判定为缆绳断裂:
(1)光缆通讯中断时间大于某值(如:大于10 s);
(2)缆绳拉力持续小于某值(如:持续10 s拉力小于100 kg);
(3)球上降压变压器输入端线电压过低(如:三相电压皆小于100 V);
(4)主气囊与外界大气压力差大于某值(如:100 mmH20);
(5)在GPS正常的前提下,球体高度大于某值一定时间(如:超过10 s高于4 000 m);
此时若判定缆绳正常,再根据当前的通讯状态判断是进入Ma1模式(缆绳正常、通讯正常),还是进入Ma2模式(缆绳正常、通讯中断)。
当准确判定了压力调节系统当前的工作模式Mi后,控制软件会根据当前模式所需要的输入条件逐一按照既定的逻辑函数表达式控制各个执行件动作。
3、 结 语
本文介绍的压力调节系统建模方案能有效地将系留气球压力调节系统中使用到的复杂的输入变量归纳分类,并通过明晰的函数表达式对应到各个执行器的控制中去,降低了软件编制的复杂度,减少了错误的发生。同时,文中描述的建模方法能够方便地拓展到其他控制系统中,对控制系统的软件编制具有有益的参考作用。硬件系统的搭建考虑了工程设计和实施的各个方面,具有较高的可靠性和良好的扩展性。基于这种控制模型设计的某系留气球压力调节系统,长期以来系统功能正常,运行稳定可靠。
责任编辑:gt










 工商网监
工商网监
评论