2022 年 4 月 14 日,中国北京讯 - 全球半导体解决方案供应商瑞萨电子(TSE:6723)今日宣布,率先推出符合PCIe Gen6严格标准的时钟缓冲器和多路复用器。作为业内先进的时钟
2022-04-14 15:33:49 2894
2894 
随着科技的飞速发展,时钟缓冲器作为电子设备中的关键部件,其技术性能和市场需求也在不断提高。本文将以国产时钟缓冲器为切入点,深入探讨其技术革新和市场竞争。一、国产时钟缓冲器的技术革新1.高精度控制技术
2025-11-18 17:14:535941 
Si5332任意频率时钟、Si522xx PCIe时钟系列和Si532xx PCIe缓冲器系列 率先提供兼容PCIe Gen 5的解决方案。
2019-04-17 11:02:065907 大家好,我正在Xilinx Artix FPGA上实现一个应用于128x128输入图像的并行流水线5x5卷积器。输入像素通过行缓冲器从外部存储器流式传输。行缓冲区存储前4个完整图像行,然后开始每个
2020-05-18 09:52:11
毕设题目 :75mhz双路时钟缓冲器,求助
2021-02-27 21:45:00
了就是下雨了。今天咱们来看看零延时缓冲器吧。也是由缓冲一词想到的。它是指一种可以将一个时钟信号扇出成多个时钟信号,并使这些输出之间有零延时和很低的偏斜的器件。此器件很适合用于要求输入到输出和输出到输入
2014-05-20 17:32:38
AKD8181D,AK8181时钟扇出缓冲器评估板。因此,很容易评估DC / AC特性并确认产品功能
2020-08-25 15:26:54
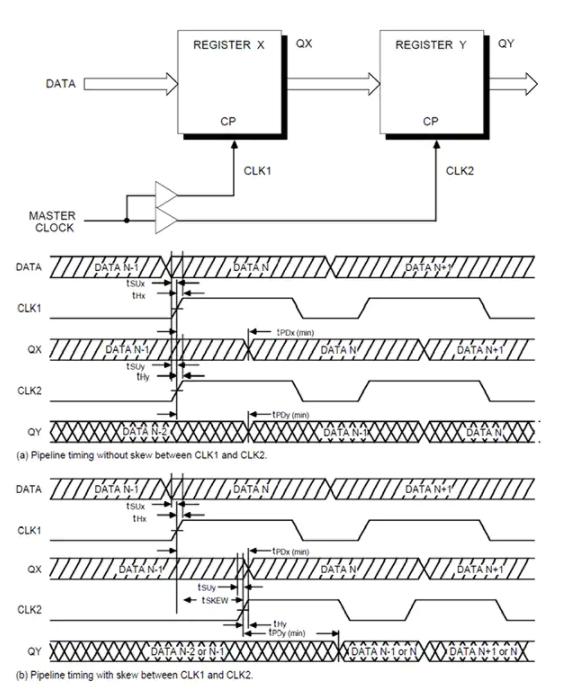
Technology Inc. (IDT) 和 ON Semiconductor 的示例解决方案解释其工作原理,并详细说明如何控制时钟偏移。本文还会探究测试方法,以确保这些器件的稳定性。
2020-12-30 07:38:55
中,一个时钟源要驱动多个器件,因此可使用时钟缓冲器(通常称为扇出缓冲器)来复制信号源,提供更高的激励电平。图 1. 使用扇出缓冲器创建大量单输入频率副本LMK00304 扇出缓冲器就是一个很好的例子
2022-11-21 07:25:28
:减少了物料清单 (BOM) 上的组件数量,从而实现一个更小、成本有效性更高的解决方案。更为重要的一点是,你可以移除缓冲器二极管,而这通常是一个600V的部件…
2022-11-17 07:51:39
需求。作为该最新博客系列的开篇文章,我将帮助您了解如何正确测量时钟缓冲器的附加抖动。为什么抖动很重要?在当今数据通信、有线及无线基础设施以及其它高速应用等高级系统中,时钟抖动是整体系统性能的关键因素。要
2018-09-13 14:38:43
放低的解决方案。坏消息是,基于比较器的缓冲器容易产生过冲。这些学生们在论文中提出一种利用可变电压控制的电流源(VVCCS)解决这种过冲问题的方法。
2021-04-02 07:32:16
与传统的时钟缓冲器相比,高速运算放大器有哪些优势?怎样去设计一个灵活的时钟缓冲器?
2021-04-14 06:35:37
本文设计了一款用于零延迟时钟缓冲器的PLL,采用一种结构简单并且实现低失配的电荷泵,详细阐述了对噪声有很强抑制作用的一种差分结构的压控振荡器,采用CSMC 0.5μm N 阱CMOS 工
2010-01-25 11:50:43 13
13 赛普拉斯半导体公司(Cypress Semiconductor)于近期宣布启动性能增强型零延迟缓冲器(ZDB)的生产。与面向高速通信和消费类设备的所有引脚兼容型产品相比,
2006-03-13 13:05:31661 TI推出正弦至正弦波时钟缓冲器
日前,德州仪器 (TI) 宣布推出业界最小型 4 通道、低功耗、低抖动正弦至正弦波时钟缓冲器。作为正弦波时钟缓冲器系列产品中的首款
2009-11-30 10:53:511027 缓冲器,缓冲器是什么?
buffer 中文译名: 缓冲,缓冲器,缓冲液 解释:1、 电信设备。在数据传输中,用来弥补不同数据处
2010-03-08 13:30:112740 缓冲器工作原理是什么,气弹簧(gasspring)是一种可以起支撑、缓冲、制动、高度调节及角度调节等功能的产业配件。
2011-09-03 19:11:3714514 缓冲器,缓冲器基本原理是什么?
最基本线路构成的门电路存在着抗干扰性能差和不对称等缺点。为了克服这些缺点,可以在输出或输
2011-09-03 19:10:469850 1 引言
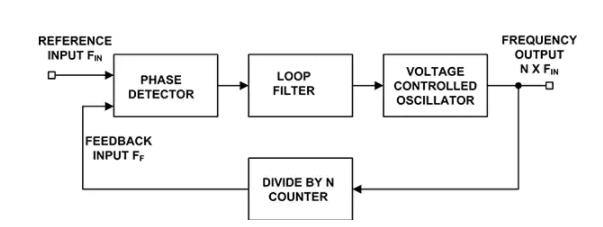
本文在传统锁相环结构的基础上进行改进,设计了一款用于多路输出时钟缓冲器中的锁相环,其主 要结构包括分频器、鉴频鉴相器(PFD)、电荷泵、环路滤波器
2010-08-17 15:33:591683 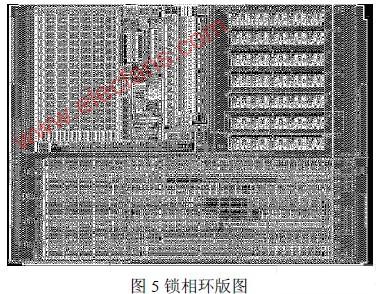
Silicon Laboratories (芯科实验室有限公司)日前宣布扩展其PCI Express(PCIe)时钟发生器和时钟缓冲器产品组合。
2012-02-02 09:31:561847 日前,德州仪器 (TI) 宣布推出 2 款最新通用时钟缓冲器系列,进一步壮大其高性能时钟缓冲器产品阵营。CDCLVC1310 LVCMOS 时钟缓冲器可在晶振模式下实现 –169 dBc/Hz 的业界领先相位噪声
2012-04-05 08:47:281427 高压直流缓冲器是一种类变压器的直流短路电流抑制装置,结合高压直流断路器可有效地抑制、切断直流输电系统中的短路电流。首先基于高压直流缓冲器的等效电路,采用非线性电阻和非线性电感并联的方法建立其等效模型
2018-02-07 16:07:298 想要降低系统中增加的噪声,必须降低电压噪声。常用方法——并联放置多个缓冲器可降低电压噪声。但是,该方法会使偏置电流、电流噪声、输入电容,统统提高,这时,你需要一款4通道JFET缓冲放大器! 缓冲器是什么? 许多电子电路需要利用一个器件来将不同的电路隔离或分离开。
2018-05-27 05:13:0015882 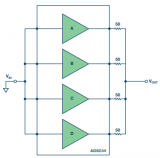
EngineerIt-测量时钟扇出缓冲器的残余噪声
2018-08-13 00:23:004397 缓冲器安装在井道底坑内,要求其安装牢固可靠,承载冲击能力强,缓冲器应与地面垂直并正对轿厢(或对重)下侧的缓冲板。缓冲器是一种吸收、消耗运动轿厢或对重的能量,使其减速停止,并对其提供最后一道安全保护的电梯安全装置。
2018-11-29 17:22:4041993 液压缓冲器(shock absorber)依靠液压阻尼对作用在其上的物体进行缓冲减速至停止,起到一定程度的保护作用。适用于起重运输、电梯、冶金、港口机械、铁道车辆等机械设备,其作用是在工作过程中防止硬性碰撞导致机构损坏的安全缓冲装置。
2018-12-16 10:14:5423148 数字缓冲器和三态缓冲器可在数字电路中提供电流放大,以驱动输出负载,与单输入,单输出逆变器或 NOT TTL 7404的门,它在输出上反转或补充其输入信号,“缓冲器”不执行反转或决策制作功能(如具有
2019-06-26 12:02:2717370 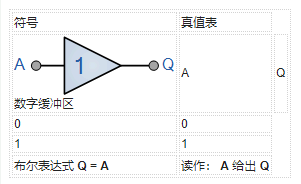
IDT公司的9ZXL1951D是19路输出零延迟时钟驱动器,具有用于PCIe和CPU的第二代增强性能缓冲器,满足所有发表过的QPI/UPI, DB2000Q和PCIe Gen1–5抖动指标.器件的ZDB模式相位抖动器
2021-04-05 22:47:003086 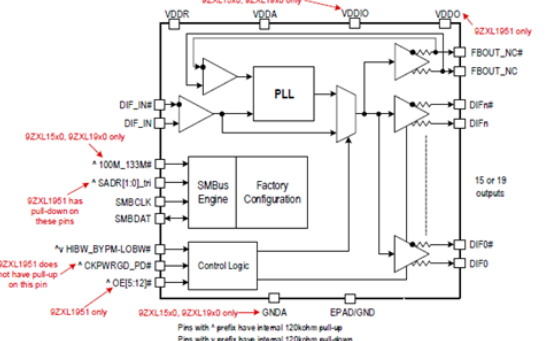
本应用报告介绍了实现 IDT 基于 PLL 的零延迟缓冲器的输入参考时钟和输出时钟之间定义的相位关系的不同方法。该报告重点介绍了 PLL 反馈环路中不同走线长度和反馈时钟输入端的电容负载对生成早期
2021-06-15 10:48:413297 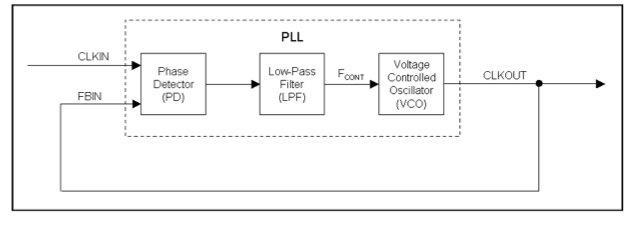
电子发烧友网站提供《DC1954A 时钟缓冲器参考设计.pdf》资料免费下载
2020-12-31 04:50:238 电子发烧友网站提供《DC1954A 时钟缓冲器参考设计.pdf》资料免费下载
2020-12-31 04:54:379 电子发烧友网站提供《NB6N11SMNGEVB 时钟缓冲器参考设计.pdf》资料免费下载
2020-12-31 04:57:0511 电子发烧友网站提供《NB6L611MNGEVB 时钟缓冲器参考设计.pdf》资料免费下载
2020-12-31 04:58:5814 电子发烧友网站提供《NB6L72MMNGEVB 时钟缓冲器参考设计.pdf》资料免费下载
2020-12-31 05:00:1512 电子发烧友网站提供《NB6L11SMNGEVB 时钟缓冲器参考设计.pdf》资料免费下载
2020-12-31 05:01:049 电子发烧友网站提供《NB6L14MMNGEVB 时钟缓冲器参考设计.pdf》资料免费下载
2020-12-31 05:01:5911 电子发烧友网站提供《ADCLK846/PCBZ 时钟缓冲器参考设计.pdf》资料免费下载
2020-12-31 05:02:528 电子发烧友网站提供《ADCLK944/PCBZ 时钟缓冲器参考设计.pdf》资料免费下载
2020-12-31 05:03:4914 电子发烧友网站提供《NB7L14MNGEVB 时钟缓冲器参考设计.pdf》资料免费下载
2020-12-31 05:04:3913 电子发烧友网站提供《NB6N14SMNGEVB 时钟缓冲器参考设计.pdf》资料免费下载
2020-12-31 05:05:239 AD9508:1.65 GHz时钟扇出缓冲器,集成输出分频器和延迟调整
2021-03-21 15:45:302 缓冲器分为输入缓冲器和输出缓冲器两种;输入缓冲器的作用是将外设送来的数据暂时存放,以便处理器将它取走,输出缓冲器的作用是用来暂时存放处理器送往外设的数据。 缓冲器的工作原理: 当液压缓冲器受到
2021-08-25 17:31:2527640 液压缓冲器是在工作过程中防止硬性碰撞导致机构损坏的安全缓冲装置,依靠液压阻尼对作用在其上的物体进行缓冲减速至停止,起到一定程度的保护作用。 液压缓冲器工作原理 当撞头受到冲击时,活塞杆压缩油缸中
2021-08-25 17:37:5210070 缓冲寄存器又称缓冲器,它分输入缓冲器和输出缓冲器两种。前者的作用是将外设送来的数据暂时存放,以便处理器将它取走;后者的作用是用来暂时存放处理器送往外设的数据。有了数控缓冲器,就可以使高速工作的CPU
2021-08-31 17:37:5312856 液压缓冲器是在工作过程中防止硬性碰撞导致机构损坏的安全缓冲装置,依靠液压阻尼对作用在其上的物体进行缓冲减速至停止,起到一定程度的保护作用。 液压缓冲器工作原理 当撞头受到冲击时,活塞杆压缩油缸中
2021-09-02 17:17:136011 全球半导体解决方案供应商瑞萨电子(TSE:6723)近日宣布,率先推出符合PCIe Gen6严格标准的时钟缓冲器和多路复用器。
2022-04-15 11:18:512163 IDT 还提供另一个更简单的 CMOS 缓冲器系列,即5PB11xx系列,由五个时钟扇出缓冲器成员组成,其中最后两位数字代表输出数量。这些缓冲器是非常高性能、低抖动、低偏移和传播延迟、非常低功耗的直接 CMOS 扇出缓冲器。
2022-05-05 15:41:132706 
KOYUELEC光与电子提供技术支持有容微电子GM50301:超低附加抖动差分输出时钟缓冲器
2022-05-07 11:38:453815 KOYUELEC光与电子提供技术支持,有容微电子GM50101:超低附加抖动时钟缓冲器。
2022-05-07 11:40:151918 的扇出型缓冲器,是一种将一路时钟源信号通过频率复制生成多路时钟信号的器件,通常时钟缓冲器还兼具有时钟分配,格式转换和电平转换的功能。 对于需要多路时钟信号的电子系统来说,时钟源加时钟缓冲器的方案可以有效降低系统成本,简化电路设计,为系统多个组件提供多路参
2022-10-18 18:36:5430578 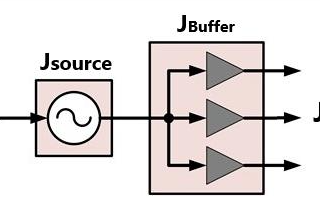
GRANDMICRO有容微电子GM50101:超低附加抖动时钟缓冲器
2023-03-02 11:06:161784 
DS34T10x和DS34S10x TDM分组(TDMoP)器件利用抖动缓冲器来补偿分组网络中存在的分组延迟变化(PDV)。本应用笔记解释了PDV及其对通信质量的影响。讨论了抖动缓冲器的功能和类型。本文还介绍了如何在TDMoP器件中设置抖动缓冲控制器的参数,以最大程度地减少PDV的影响。
2023-03-08 18:20:001900 
液压缓冲器通过压力控制阀将冲击能量转换成油的流动,从而达到缓冲目的。内置的压缩弹簧将活塞杆回复到初始。 缓冲特性可以通过调节环进行修整。 也可在驱动器动作时进行 动态调整。
2023-04-23 16:04:246203 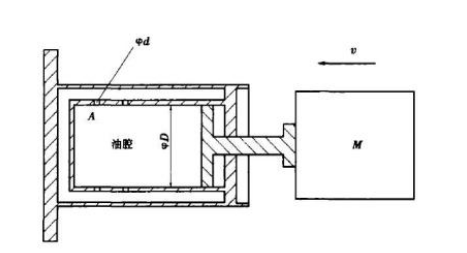
液压缓冲器强度是否能够调节,取决于液压缓冲器的种类,目前市面上较为常用的液压缓冲器包括可调液压缓冲器、不可调液压缓冲器,这两种缓冲器调节强度的实际效果是不一样的。
2023-04-24 16:12:014971 在消费电子应用中,与典型的时钟缓冲应用相比,其频率往往较低,要求也更低,廉价的高速运算放大器(~100 MHz带宽)可以为传统时钟缓冲器提供有吸引力的替代方案。高速放大器可能比传统时钟缓冲器便宜,但它们可以适应各种设计配置。
2023-06-17 17:29:142042 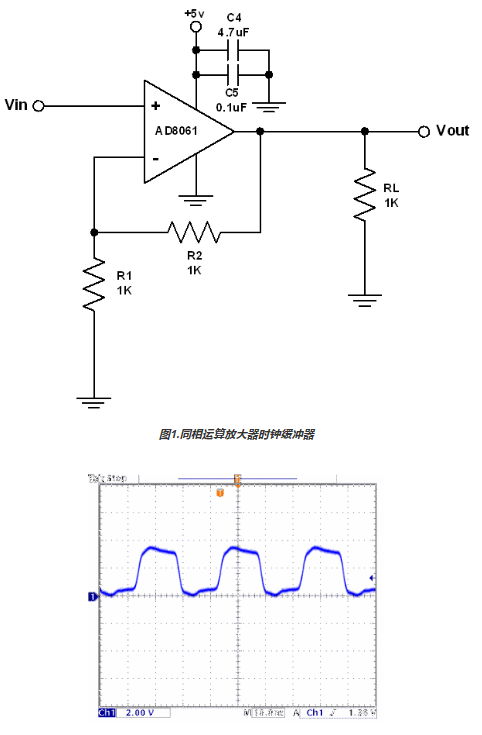
时钟缓冲器选型目录
2021-11-19 16:38:532145 
RC缓冲器是一种利用电阻(R)和电容(C)组合来控制或改变电路中信号的电路。它的主要功能是对信号进行整形、延时、滤波或降低噪声等。RC缓冲器广泛应用于数字和模拟电路中,以改善电路的性能。 工作原理
2024-06-09 11:17:003422 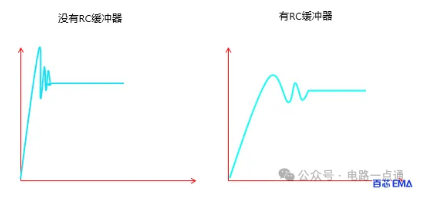
缓冲器是干嘛的 缓冲器是一种广泛应用于电子、电气、通信、计算机、自动化控制等领域的电子元件。它的作用是在电路中起到稳定电压、电流、信号等参数的作用,以保证电路的正常工作和性能。本文将详细介绍缓冲器
2024-06-10 16:06:0011134 在当今高科技发展的时代,电子设备已无处不在,而驱动这些设备的背后功臣之一便是那些不起眼的电子元件。其中,八路缓冲器驱动器凭借其独特的工作原理和强大功能,成为了众多电子设备中不可或缺的一部分。今天
2024-06-24 17:03:041615 三态缓冲器(Three-state buffer),又称为三态门、三态驱动器,是一种特殊的逻辑门电路,其工作原理主要基于三态输出控制。三态缓冲器对输入值不执行任何运算,其输出值和输入值一样,但它在计算机的设计中有着重要作用。
2024-08-02 17:47:059988 电子发烧友网站提供《CDCM1802时钟缓冲器数据表.pdf》资料免费下载
2024-08-21 11:46:360 电子发烧友网站提供《CDCVF310时钟缓冲器数据表.pdf》资料免费下载
2024-08-22 09:35:230 电子发烧友网站提供《CDCVF2310时钟缓冲器数据表.pdf》资料免费下载
2024-08-22 09:37:050 电子发烧友网站提供《CDCS501 SSC时钟发生器/缓冲器数据表.pdf》资料免费下载
2024-08-22 10:05:110 电子发烧友网站提供《CDCS503带可选SSC的时钟缓冲器/时钟乘法器数据表.pdf》资料免费下载
2024-08-22 09:18:510 电子发烧友网站提供《CDCS504-Q1时钟缓冲器和时钟乘法器数据表.pdf》资料免费下载
2024-08-23 10:35:540 缓冲器由电阻(R)和电容(C)组成。电容作为电荷存储的介质,而电阻则提供放电路径。这种组合使得RC缓冲器能够在MOSFET关闭时储存能量,并在MOSFET导通时释放能量。 RC缓冲器的工作过程 1. 充电过程 当MOSFET关闭时,缓冲电容通过电阻R1充电。这个过程
2024-10-04 16:25:001267 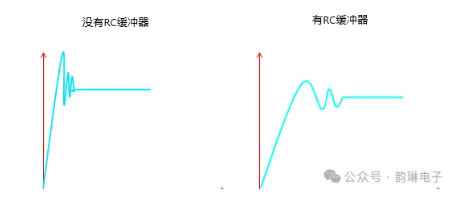
HAC946QN时钟缓冲器的技术优势与应用场景,完全替代ADCLK946BCPZ
2025-02-13 14:09:13899 HAC946QN是一款2.1GHz,6路输出差分高性能时钟扇出缓冲器,且高度通用、低附加抖动的产品,可以生成六路LVPECL时钟副本的缓冲区输出。可以支持LVPECL、LVDS、HCSL或
2025-02-13 16:56:461 HAC925QN 是一款 2.1GHz,2 路输出差分高性能时钟扇出缓冲器,且高度 通用、低附加抖动的产品,可以生成两路 LVPECL 时钟副本的缓冲区输出,可 以支持 LVPECL、LVDS 或
2025-02-13 16:53:500 HAC944QN 是一款 2.1GHz,4 路输出差分高性能时钟扇出缓冲器,且高度 通用、低附加抖动的产品,可以生成四路 LVPECL 时钟副本的缓冲区输出。可 以支持 LVPECL、LVDS
2025-02-13 16:53:420 HACP1204QN 是一款 2.0GHz、4 路输出差分高性能时钟扇出缓冲器,且高 度通用、低附加抖动缓冲器,可以从两个可选的 LVPECL、LVDS 或 LVCMOS 输入之一生成四
2025-02-13 16:52:511 HACP1208QN 是一款 2.0GHz、8 路输出差分高性能时钟扇出缓冲器,且高 度通用、低附加抖动缓冲器,可以从两个可选的 LVPECL、LVDS 或 LVCMOS 输入之一生成八
2025-02-13 16:53:000 HACP1216QN 是一款 2.0GHz、16 路输出差分高性能时钟扇出缓冲器,且高 度通用、低附加抖动缓冲器,可以从两个可选的 LVPECL、LVDS、HCSL 或 LVCMOS 输入之一
2025-02-13 17:39:440 到低电平 1G 为低时的状态。 可在 1.8V、2.5V 和 3.3V 电源电压下工作,工作温度范围为-55℃~+125℃。a) 高性能 1:4 LVCMOS 时钟缓冲器; b) 极低的附加抖动<25fs 标称值; c) 输出偏斜<55ps(典型); d) 非常低的传播延迟<
2025-02-13 17:40:241 到低电平 1G 为低时的状态。 可在 1.8V、2.5V 和 3.3V 电源电压下工作,工作温度范围为-55℃~+125℃。a) 高性能 1:6 LVCMOS 时钟缓冲器; b) 极低的附加抖动<25fs 标称值;c) 输出偏斜<55ps(典型); d) 非常低的传播延迟<3ns;e)
2025-02-13 17:41:110 到低电平 1G 为低时的状态。 可在 1.8V、2.5V 和 3.3V 电源电压下工作,工作温度范围为-55℃~+125℃。a) 高性能 1:8 LVCMOS 时钟缓冲器;b) 极低的附加抖动<25fs 标称值 c) 输出偏斜<55ps(典型);d) 非常低的传播延迟<3ns; e) 同步输出启
2025-02-13 17:42:160 到低电平 1G 为低时的状态。 可在 1.8V、2.5V 和 3.3V 电源电压下工作,工作温度范围为-55℃~+125℃。a) 高性能 1:10 LVCMOS 时钟缓冲器; b) 极低的附加抖动<25fs 标称值; c) 输出偏斜<55ps(典型); d) 非常低的传播延迟
2025-02-13 17:42:530 到低电平 1G 为低时的状态。 可在 1.8V、2.5V 和 3.3V 电源电压下工作,工作温度范围为-55℃~+125℃。a) 高性能 1:12 LVCMOS 时钟缓冲器; b) 极低的附加抖动<25fs 标称值 c) 输出偏斜<55ps(典型); d) 非常低的传播延迟<
2025-02-13 17:43:370 时钟缓冲器是一种用于生成、处理和分配时钟信号的电子电路,主要用于确保数字系统中各模块的同步操作。其核心功能是对输入时钟信号进行调理和分配,以提供高质量、低抖动的时钟信号。
2025-02-17 14:34:512142 HACP1204QN是一款2.0GHz、4路输出差分高性能时钟扇出缓冲器,且高度通用、低附加抖动缓冲器,可以从两个可选的LVPECL、LVDS或LVCMOS输入之一生成四对LVPECL时钟副,用于
2025-03-06 15:31:020 HACP1208QN是一款2.0GHz、8路输出差分高性能时钟扇出缓冲器,且高度通用、低附加抖动缓冲器,可以从两个可选的LVPECL、LVDS或LVCMOS输入之一生成八对LVPECL时钟副,用于
2025-03-06 15:33:000 HACP1216QN是一款2.0GHz、16路输出差分高性能时钟扇出缓冲器,且高度通用、低附加抖动缓冲器,可以从两个可选的LVPECL、LVDS、HCSL或LVCMOS输入之一生成十六对LVPECL
2025-03-06 15:34:260 HAC1104TS是一种模块化、高性能、低偏斜、通用时钟扇出缓冲器,时钟缓冲器设计时考虑了模块化方法。具备低附加抖动、低偏斜等特性,工作温度范围宽。支持异步输出启用控制(1G),将输出切换到低电平1G为低时的状态。可在1.8V、2.5V和3.3V电源电压下工作,工作温度范围为-55℃~+125℃。
2025-03-06 15:37:050 HAC1106TS是一种模块化、高性能、低偏斜、通用时钟扇出缓冲器,时钟缓冲器设计时考虑了模块化方法。具备低附加抖动、低偏斜等特性,工作温度范围宽。支持异步输出启用控制(1G),将输出切换到低电平1G为低时的状态。可在1.8V、2.5V和3.3V电源电压下工作,工作温度范围为-55℃~+125℃。
2025-03-06 15:37:541 HAC1108TS是一种模块化、高性能、低偏斜、通用时钟扇出缓冲器,时钟缓冲器设计时考虑了模块化方法。具备低附加抖动、低偏斜等特性,工作温度范围宽。支持异步输出启用控制(1G),将输出切换到低电平1G为低时的状态。可在1.8V、2.5V和3.3V电源电压下工作,工作温度范围为-55℃~+125℃。
2025-03-06 15:38:542 PI6CB3320xxA 系列为 PCIe 6.0 时钟缓冲器,具有 20、16、13、12、8 和 4 通道低功耗 HCSL 输出,具有 85Ω或 100Ω输出阻抗的片上终端 (On-Chip Termination)。
2025-04-10 15:49:51971 
时钟缓冲器作为现代电子技术中的一项关键元件,其在信息化建设和智能化发展中所扮演的角色日益凸显。随着社会的不断发展,人们对信息传输的速度和准确性要求越来越高,时钟缓冲器以其独有的功能,确保了数据传输
2025-05-27 14:08:45567 
时钟缓冲器是现代电子系统中重要的组成部分,它可以有效地解决时钟信号在长距离传输和电路间切换时遇到的问题。在大多数电子设备中,时钟信号被用来同步各个组件的操作,确保它们按照预定的时间顺序进行工作。然而
2025-07-15 17:27:11506 
在电子系统设计中,时钟信号的稳定与可靠性对于整个系统的正常运行至关重要。为了确保时钟信号在传输过程中不会受到干扰或延迟,工程师们通常会使用一种名为“时钟缓冲器”的装置。本文将探讨时钟缓冲器的应用条件
2025-09-04 15:01:45675 
该CDC3RL02是一款双通道时钟扇出缓冲器,设计用于需要时钟缓冲的便携式终端设备,例如移动电话,这些设备具有最小的附加相位噪声和扇出功能。该器件将单个时钟源(例如温度补偿晶体振荡器 (TCXO
2025-09-17 09:57:07689 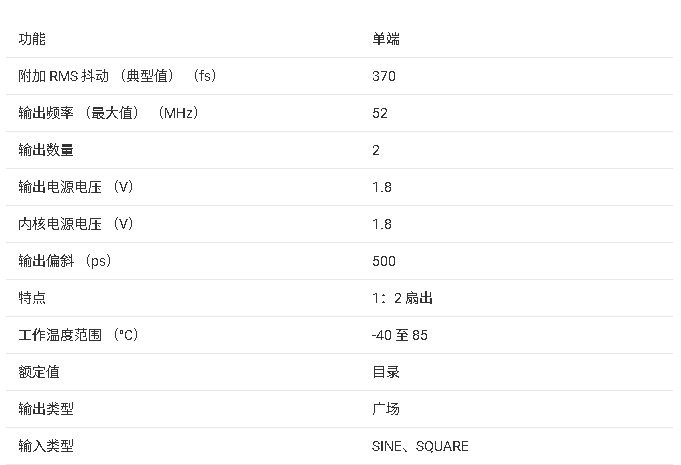
Texas Instruments LMK1D1208P 8通道输出LVDS时钟缓冲器将两个中的一个可选时钟输入(IN0和IN1)分配给八对差分LVDS时钟输出(OUT0至OUT7)。通过超小延迟实现时钟分配。输入可以为LVDS、LVPECL、LVCMOS、HCSL或CML。
2025-09-18 09:52:54652 
LMH2180是一款高速双时钟缓冲器,专为便携式通信和 需要多个精确多时钟系统的应用。该LMH2180集成了两个 75 MHz 低电平 带有独立关断引脚的噪声缓冲器集成到小型封装中。LMH2180确保一流的 通过消除串扰,在基带和振荡器信号路径之间进行系统作 在多个时钟信号之间。
2025-09-18 14:35:58581 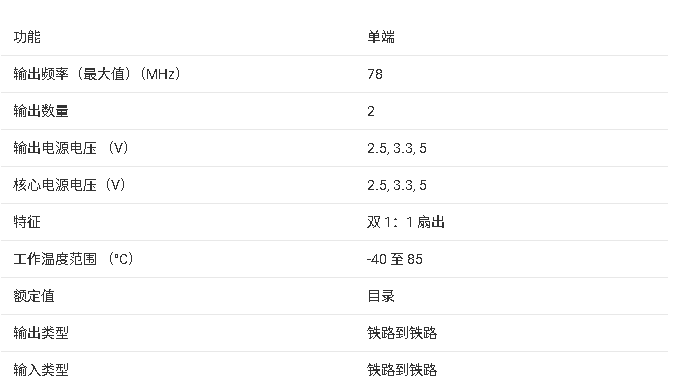
LMV112 是一款高速双时钟缓冲器,专为便携式通信和精确的多时钟系统而设计。LMV112集成了两个40 MHz低噪声缓冲器,可优化应用并优于大型分立式解决方案。该器件可在基带和振荡器信号路径之间实现出色的系统作,同时消除串扰。
2025-09-22 10:08:53606 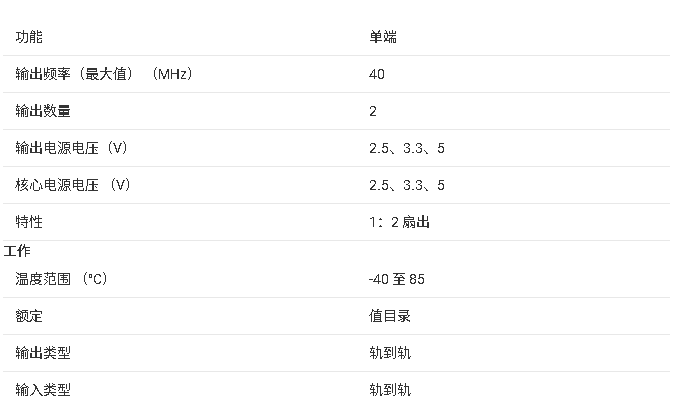
时钟缓冲器广泛应用于各种电子系统中,以下是一些典型的应用场景:1.通信设备:在高速通信设备中,时钟信号的质量直接影响数据传输的准确性。时钟缓冲器通过优化信号完整性,确保通信系统的稳定性和可靠性。2.
2025-10-30 14:12:01296 在现代高速数字系统中,时钟信号的完整性直接影响着系统的性能和稳定性。时钟缓冲器作为时钟树设计的核心组件,承担着信号分配、噪声隔离和时序优化的关键任务。随着5G通信、AI芯片和数据中心等领域的快速发展
2025-12-16 15:57:19264 
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论