SLAM作为一种基础技术,从最早的军事用途(核潜艇海底定位就有了SLAM的雏形)到今天,已经逐步走入人们的视野,过去几年扫地机器人的盛行让它名声大噪,近期基于三维视觉的VSLAM又让它越来越显主流。
2018-08-08 10:07:28 9779
9779 在无人机视觉系统的常规研究中,用于基于视觉的导航的视觉同步定位和映射(Visual SLAM)和视觉里程计(VO)是主要课题。
2022-07-28 11:21:421110 本文提出了一个鲁棒且快速的多模态语义 SLAM 框架,旨在解决复杂和动态环境中的 SLAM 问题。具体来说,将仅几何聚类和视觉语义信息相结合,以减少由于小尺度对象、遮挡和运动模糊导致的分割误差的影响。
2022-08-31 09:39:141302 视觉惯性里程计和SLAM算法广泛应用于各种领域,如服务机器人、无人机和自主车辆。大多数SLAM算法都是基于静态环境假设。然而,在现实世界中,存在各种动态对象,并且它们降低了姿态估计精度。
2022-09-14 16:22:24785 本文针对视觉SLAM的VO广泛使用的特征点法以及光流法存在的问题,寻求建立一种更加简便且稳定的图像配准算法,该算法以图像一致性为理论基础,利用VO顺序采集图像的帧间特点,最后通过实验验证了所设计的基于边缘特征一致性的图像配准评价符合VO应用的视觉要求。
2022-09-15 10:22:59688 相较于激光雷达SLAM系统,视觉SLAM系统具有不主动发出信号的优点。此外,视觉是对环境的稠密感知,可以利用视觉特征构建出更符合人类感知的环境地图。
2022-12-21 16:18:092454 本文的优势不仅包括讨论A-SLAM的内部组成部分,还包括其应用领域、局限性和未来前景,以及对过去十年A-SLAM进行全面的统计调查。
2023-03-17 10:44:57504 上周的组会上,我给研一的萌新们讲解什么是SLAM,为了能让他们在没有任何基础的情况下大致听懂,PPT只能多图少字没公式,这里我就把上周的组会汇报总结一下。 这次汇报的题目我定为“视觉SLAM:一直在
2023-08-21 10:02:071573 
激光SLAM局部定位精度高但全局定位能力差且对环境特征不敏感,而视觉SLAM全局定位能力好但局部定位相对激光雷达较差,两者融合可以提高SLAM系统的精度和鲁棒性。
2023-10-23 11:01:14650 
神经隐式表示已经被探索用于增强视觉SLAM掩码算法,特别是在提供高保真的密集地图方面。
2024-01-17 10:39:50442 
LSD-SLAM 即 Large-Scale Direct SLAM,兼容单目相机和双目相机。LSD-SLAM是一种基于光流跟踪的直接法SLAM,但是实现了半稠密建图,建图规模大,可以在线实时运行。
2024-02-26 09:41:50268 
SLAM技术作为机器人自主移动的关键技术,让很多人都误解为:SLAM=机器人自主定位导航。 其实,SLAM≠机器人自主定位导航 ,不解决行动问题。 SLAM如其名一样,主要解决的是机器人的地图构建
2018-08-24 16:56:24
常有必要的 。 回环检测失败 如何提升机器人回环检测能力? 那么,怎么才能让机器人的回环检测能力得到一个质的提升呢?首先要有一个算法上的优化。 1. 基于图优化的SLAM算法 基于图优化
2019-03-06 15:38:04
也将SLAM分为激光SLAM和视觉SLAM。激光SLAM比视觉SLAM起步早,在理论、技术和产品落地上都相对成熟。基于视觉的 SLAM 方案目前主要有两种实现路径,一种是基于 RGBD 的深度摄像机
2018-12-06 10:25:32
目前,SLAM(即时定位与地图构建)技术主要被运用于无人机、无人驾驶、机器人、AR、智能家居等领域,从各应用场景入手,促进消费升级。 机器人 激光+SLAM是目前机器人自主定位导航所
2020-12-01 14:26:37
研究生期间进行了基于2D激光雷达的SLAM的研究,当时主要做了二维激光雷达的数据处理。小弟不才,没有入得了SLAM的坑,却一直谜之向往,如今得以机会,决定正式迈出第一步,彻底进入SLAM的坑!心中
2021-08-30 06:13:31
视觉SLAM——特征点法与直接法对比以及主流开源方案对比 ORB LSD SVO DSO
2020-06-02 16:56:49
【总结】视觉SLAM笔记整理
2020-07-17 14:05:20
预设一些特征来定位,比较典型的例子是Amazon的Kiva。 Amazon的Kiva 【 ■SLAM(同步定位与地图构建)算法在AGV小车中的使用 目前,AGV厂家运用的最先进的导航方式
2018-11-09 15:59:01
HOOFR SLAM System: An Embedded Vision SLAM Algorithm and Its Hardware-Software Mapping-Based
2021-12-21 06:35:49
题目:基于SLAM的移动机器人设计嵌入式PPT应具有的几个部分1、有哪些硬件 1)小车 2)STM32F429开发板 3)树莓派3b+开发板 4)4g通信模块 5)GPS模块 6
2021-11-08 06:17:14
基于视觉的slam自动驾驶,这是我们测试的视频《基于slam算法的智能机器人》调研分析报告项目背景分析机器人曾经是科幻电影中的形象,可目前已经渐渐走入我们的生活。机器人技术以包含机械、电子、自动控制
2021-08-09 09:37:34
嵌入式系统开发与应用——基于视觉的机器人SLAM入门实践1一、OpenCV的安装与配置1. 下载OpenCV3.4.1并解压到ubuntu相应目录上2. 下载安装依赖库和编译工具cmake(1)更新
2021-12-16 08:16:12
如何实现基于RK3399开发板的cartographer激光SLAM建图模块的设计?
2022-03-07 07:05:11
视觉惯性里程计 综述 VIO Visual Inertial Odometry msckf ROVIO ssf msf okvis ORB-VINS VINS-Mono gtsam目录里程计
2021-07-27 07:21:50
大家好,我想学习SLAM技术有资深的老师愿意教我吗?qq:496397940
2018-11-09 13:42:27
树莓派ROS stm32 slam Freertos VFH+A避障路径如何规划?
2022-02-09 07:09:16
的视觉里程计及后端优化的SLAM系统,似乎已经比较好用了。但其在提高实时性的同时精度却降低了,一旦精度降低,又会面临长时间累计误差的问题,特别是像ORB-SLAM那样只做局部地图优化的方案。我们该
2018-10-23 17:47:22
机器人定位导航中,目前主要涉及到激光SLAM与视觉SLAM,激光SLAM在理论、技术和产品落地上都较为成熟,因而成为现下最为主流的定位导航方式,在家用扫地机器人及商用送餐机器人等服务机器人中普遍采用了...
2021-07-05 06:41:57
SLAM(同步定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。目前,SLAM 的主要应用于机器人、无人机、无人驾驶、AR、VR 等领域。其用途包括传感器自身的定位,以及后续的路径规划、运动性能、场景理解。
2020-05-20 08:19:40
什么是激光SLAM?视觉VSLAM又是什么?激光SLAM和视觉VSLAM有哪些不同之处?
2021-11-10 07:16:02
什么是激光SLAM?激光SLAM技术在机器人运动控制系统中的应用是什么?
2021-07-30 06:37:25
地图上看误差较大,SLAM 3.0也可灵活对已产生的地图进行调整。 即: SLAM 3.0闭环修正 | 支持多传感器融合 · 除激光雷达外,SLAM 3.0软件技术同时支持深度视觉
2019-01-21 10:57:46
请问如何理解SLAM用到的传感器轮式里程计IMU、雷达、相机的工作原理?
2021-10-09 08:52:46
实现单目视觉同时定位与建图(SLAM)仿真系统,描述其设计过程。该系统工作性能良好,其SLAM算法可扩展性强,可以精确逼近真实单目视觉SLAM过程。以方便SLAM算法的研究为目标,提
2009-04-15 08:50:37 82
82 基于扩展卡尔曼滤波的SLAM算法相关代码。
2016-03-22 14:11:1434 针对传统滤波器方法解决机器人同时定位与地图创建( SLAM)时的误差积累问题,提出了一种基于视觉词典(BOW)的三维SLAM算法,以有效解决机器人长时间运动下误差积累的问题。相比图优化SLAM中常
2017-12-22 14:58:132 当我们谈论SLAM时,最先问到的就是传感器。SLAM的实现方式与难度和传感器的形式与安装方式密切相关。传感器分为激光和视觉两大类,视觉下面又分三小方向。下面就带你认识这个庞大家族中每个成员的特性。
2018-01-09 13:09:0223853 针对复杂环境下机器人的同时定位与地图构建( SLAM)存在实时性与鲁棒性下降等问题,将一种基于ORB特征点的关键帧闭环检测匹配算法应用到定位与地图构建巾。研究并分析了特征点提取与描述符建立
2018-03-26 10:57:326 随着技术工艺的进步,摩尔定律的瓶颈似乎开始出现,追求单核更大功率的处理器还是比较困难的,而在SLAM中, 单指令,多线程GPU提供的并行性,也非常适合实时视觉的计算要求。
2018-04-09 11:06:325144 
高仙的SLAM2.0技术体系核心,是基于多传感器融合+深度学习的架构,即语义SLAM。高仙SLAM2.0技术方案以语义分析、机器学习为基础,结合云端实时信息处理以及专为多传感器融合而开发的专业算法体系,真正实现了SLAM在建图和导航两个环节的完整应用。
2018-05-15 16:48:308535 SLAM要实现定位和制图,第一步就是采集数据,而采集数据的关键就是传感器,可以说没有传感器就没有SLAM。而SLAM上的传感器种类多样,目前主流的我们可以将其分为两大类:激光雷达和摄像头。
2018-07-17 16:59:0232391 当今科技发展速度飞快,想让用户在AR/VR、机器人、无人机、无人驾驶领域体验加强,还是需要更多前沿技术做支持,SLAM就是其中之一。实际上,有人就曾打比方,若是手机离开了WIFI和数据网络,就像无人车和机器人,离开了SLAM一样。
2018-10-09 14:58:497240 SLAM(同步定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。
2018-11-14 08:54:017334 随着传感器种类和安装方式的不同,SLAM的实现方式和难度会有很大差异。按传感器来分,SLAM主要分为激光、视觉两大类。其中,激光SLAM研究较早,理论和工程均比较成熟。视觉方案目前大部分实验室研究
2019-05-12 10:31:134896 本文是调研视觉SLAM中的实现方法的总结,包括三方面内容:姿态计算、闭环检测、BA优化。
2019-05-18 11:49:014037 近年来SLAM系统与其他传感器的融合成为了一大热点。
2019-05-24 09:45:0612481 (多目)、RGBD这三类,另还有鱼眼、全景等特殊相机,但目前在研究和产品中还属于少数,此外,结合惯性测量器件(Inertial Measurement Unit,IMU)的视觉SLAM也是现在研究热点之一
2019-08-09 17:31:201430 (多目)、RGBD这三类,另还有鱼眼、全景等特殊相机,但目前在研究和产品中还属于少数,此外,结合惯性测量器件(Inertial Measurement Unit,IMU)的视觉SLAM也是现在研究热点之一
2019-09-11 22:01:351759 运动恢复结构(SfM)和 SLAM 所解决的问题非常相似,但 SfM 传统上是以离线形式进行的,而 SLAM 则已经慢慢走向了低功耗/实时/单 RGB 相机的运行模式。
2019-11-22 14:34:0716984 
近年来,伴随移动机器人在各行各业的广泛应用,SLAM这个“名字”逐渐被更多的人所熟悉,但是SLAM具体是什么、SLAM有哪些应用领域、激光SLAM和视觉SLAM哪种方式更有优势等等这些问题却总是模糊不清。今天,小编就带大家来详细了解一下~
2020-01-18 17:43:003117 ,就相当于人类失去了双眼一样。 一、什么是视觉SLAM? SLAM的英文全称是Simultaneous Localization and Mapping,中文称作「即时定位与地图创建」,而视觉SLAM就是用摄像头来完成环境的感知工作。 举个例子,当你第一天去上大学的时候,为了迅速熟悉校园环境并且找到
2020-04-17 09:21:4153848 在业内,视觉SLAM与激光SLAM谁更胜一筹,谁将成为未来主流趋势这一问题,成为大家关注的热点,不同的人也有不同的看法及见解,以下将从成本、应用场景、地图精度、易用性几个方面来进行详细阐述。
2020-08-28 14:53:3016068 
SLAM技术是一种计算机程序,用于构建座席周围环境的虚拟地图并更新其实时坐标。
2021-01-22 14:55:0018670 当我们谈论SLAM时,最先问到的就是传感器。SLAM的实现方式与难度和传感器的形式与安装方式密切相关。传感器分为激光和视觉两大类,视觉下面又分三小方向。
2020-12-26 00:25:302033 SLAM作为机器人自主定位导航的重要突破口正不断引起业内重视,它是实现机器人自主行走的关键技术,可帮助机器人实现即时定位与地图构建,在实际应用中,SLAM技术究竟又是如何实现的呢?一起来探个究竟。
2020-12-26 09:23:19569 SLAM这个“名字”逐渐被更多的人所熟悉,但是SLAM具体是什么、SLAM有哪些应用领域、激光SLAM和视觉SLAM哪种方式更有优势等等这些问题却总是模糊不清。
2020-12-26 09:39:322084 定位技术是机器人实现自主定位导航的最基本环节,是机器人在二维工作环境中相对于全局坐标的位置及其本身的姿态。目前SLAM (Simultaneous Localization and Mapping即时定位与地图构建)是业内主流的定位技术,有激光SLAM和视觉SLAM之分。
2020-12-26 10:59:431285 在SLAM系统中增加更多的相机可以提高鲁棒性和准确性,但会使视觉前端的设计变得非常复杂。因此,文献中的大多数系统是为特定的相机配置定制的。在这项工作中,我们的目标是一个适用于任意多相机设置的自适应
2021-01-07 11:51:061792 本文提出的立体视觉+惯导+激光雷达的SLAM系统,在比如隧道一些复杂场景下能够实现良好性能。VIL-SLAM通过将紧密耦合的立体视觉惯性里程计(VIO)与激光雷达建图和激光雷达增强视觉环路闭合相结合
2021-02-18 17:59:061949 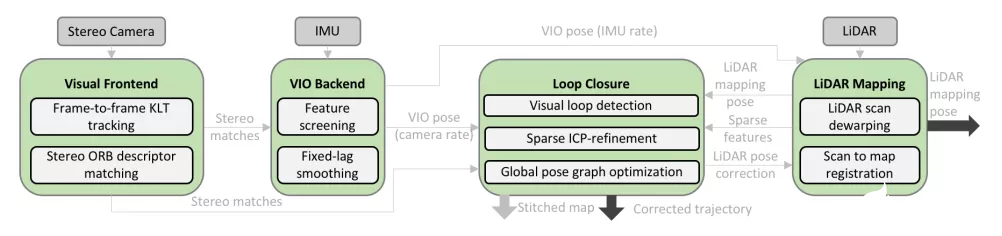
SLAM 是 Simultaneous Localization and Mapping 的缩写,中文译作“同时定位与地图构建”。它是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。如果这里的传感器主要为相机,那就称为“视觉 SLAM”。
2021-03-20 09:13:123818 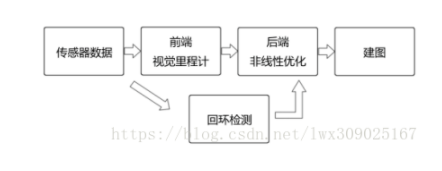
VIO-SLAM Visual-Inertial Odometry(VIO)即视觉惯性里程计,有时也叫视觉惯性系统(VINS,visual-inertial system),是融合相机和IMU数据
2021-04-07 16:57:072163 
一般将使用单线雷达建构二维地图的SLAM算法,称为2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常数据和运动都限制在2D平面内且运动平面与激光扫描平面平行。
2021-04-18 10:18:1212157 
课题组已将该研究成果应用于智能驾驶即时定位与建图(SLAM)任务中,提出了基于三维激光数据的层级式SLAM方法,实现了无GNSS环境下智能无人系统的高精度自主定位定姿,在智能驾驶国际著名公开数据集KITTI上排名全球第7(纯激光SLAM算法中排名全球第4)。
2021-04-20 09:19:301806 
我看来,vslam得发展也就是从MonoSLAM->PTAM->图优化SLAM->ORB-SLAM为代表的现代slam,其中可能还有许多内容,不过这些开源SLAM一定程度上体现了SLAM发展过程了....
2021-06-18 10:40:521357 
SLAM (simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图
2021-08-26 16:07:316791 ./oschina_soft/Snake-SLAM.zip
2022-06-16 11:27:432 近年来,使用机器学习技术进行特征提取的基于调制解调器特征的SLAM越来越受到关注,并有望在几乎所有机器人工作环境中超越传统方法。
2022-10-17 16:39:46603 近年来,使用机器学习技术进行特征提取的基于调制解调器特征的SLAM越来越受到关注,并有望在几乎所有机器人工作环境中超越传统方法。
2022-10-19 17:35:08677 视觉SLAM是一种基于视觉传感器的 SLAM 系统,与激光传感器相比,视觉传感器具有成本低、保留环境语义信息的优点,能够与深度学习进行大量结合。
2022-11-02 15:02:32747 一个建立在两个基于直接法的紧耦合的完整的激光视觉惯导融合的slam框架;
2022-11-09 09:55:541148 视觉SLAM是一种基于视觉传感器的 SLAM 系统,与激光传感器相比,视觉传感器具有成本低、保留环境语义信息的优点,能够与深度学习进行大量结合。
2022-11-29 21:38:37627 而关于SLAM,它是英文“同时定位与建图”的缩写。而有时候,我们还会听到VO,SfM等概念,而因此容易混淆。
2022-11-30 09:22:10710 SLAM本质上是一个状态估计问题,根据传感器做划分,主要是激光、视觉两大类。激光SLAM的研究在理论和工程上都比较成熟,现有的很多行业已经开始使用激光SLAM完成工业工作;而视觉SLAM
2022-12-02 15:00:281149 SLAM 是 Simultaneous Localization and Mapping 的缩写,中文译作“同时定位与地图构建”。它是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。如果这里的传感器主要为相机,那就称为“视觉 SLAM”。
2022-12-05 10:16:311247 手持SLAM设备最大的特点肯定要放到手持这个动作上面,由于SLAM算法的优越性,手持可以做到走到哪里测到哪里。
2022-12-27 10:43:413281 自主导航是机器人基础性和关键性技术,是机器人实现其他更高级任务的前提。视觉 SLAM (Simultaneous Localization And Mapping) 利用视觉传感器获取环境图像信息,基于多视图几何算法构建环境地图。
2023-01-16 10:58:292085 基于特征点法的视觉SLAM系统很难应用于稠密建图,且容易丢失动态对象。而基于直接法的SLAM系统会跟踪图像帧之间的所有像素,因此在动态稠密建图方面可以取得更完整、鲁棒和准确的结果。
2023-03-13 09:38:45746 视觉里程计最近几年越来越受到学术界以及工业界的认可,以ORB和VINS为代表的视觉SLAM已经可以满足绝大多数场景,而OV2SLAM在其他VSLAM中脱颖而出,其实时性以及具体的回环性能在测试中都得到了认可。
2023-03-21 17:16:31767 一般将使用单线雷达建构二维地图的SLAM算法,称为2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常数据和运动都限制在2D平面内且运动平面与激光扫描平面平行。
2023-03-27 11:06:561385 很多同学都觉得Slam方向难以入门,也难以学深。但其实相对来讲,不像其他很多方向,很多的东西大家都已经做了,并且做的很不错,要想发论文或者找创意突破比较吃力。slam方向还有很多深层次的多领域结合应用的内容还比较少,并且slam更深的内容还有很多东西需要做。
2023-05-09 14:25:14638 
与ORB-SLAM2相比,ORB-SLAM3在处理大视差和长时间未观测到的场景时效果更好。它还提供了更准确的帧间运动估计和更快的处理速度。
2023-06-19 09:28:121967 
视觉纹理导航,亦称Visual SLAM导航,通过自动导引车车载视觉传感器获取运行区域周的图像信息来实现导航的方法。视觉导航是以地面纹理为特征信息的视觉导航AGV
深圳市不止技术有限公司是激光雷达
2022-04-29 10:01:032613 
用在SLAM上的传感器主要可分为两大类,一种是激光雷达,而另一种是摄像头,为此,业内人士也将SLAM分为激光SLAM和视觉SLAM。激光SLAM比视觉SLAM起步早,在理论、技术和产品落地上都相对成熟。
2022-02-15 19:15:241850 
融合。 作为AR和计算机视觉领域的领先企业,谷东科技受邀参与本次技术了论坛,与业内专家和学者进行深入的交流和探讨,共同探索SLAM技术在现实世界中的发展和应用前景。我们分享了在SLAM技术方面的最新成果和经验,包括基于深度学习的实时地图构
2023-08-01 09:37:23526 正如图中所示,机器人自主定位导航技术中包括:定位和地图创建(SLAM)与路径规划和运动控制两个部分,而SLAM本身只是完成机器人的定位和地图创建,二者有所区别。
2023-08-03 11:12:00699 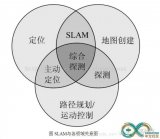
SLAM至今已历经三十多年的研究,这里给出经典视觉SLAM框架,这个框架本身及其包含的算法已经基本定型,并且已经在许多视觉程序库和机器人程序库中提供。
2023-08-10 14:15:53410 
激光雷达是最古老,研究也最多的SLAM传感器。它们提供机器人本体与周围环境障碍物间的距离信息。常见的激光雷达,例如SICK、Velodyne还有我们国产的rplidar等,都可以拿来做SLAM。激光雷达能以很高精度测出机器人周围障碍点的角度和距离,从而很方便地实现SLAM、避障等功能。
2023-08-16 10:31:081895 
近年来,SLAM技术取得了惊人的发展,领先一步的激光SLAM已成熟的应用于各大场景中,视觉SLAM虽在落地应用上不及激光SLAM,但也是目前研究的一大热点,今天我们就来详细聊聊视觉SLAM的那些事儿。
2023-09-05 09:31:111380 
IMU测量可以提高视觉SLAM在某些复杂场景的鲁棒性,在于相机快速运动、动态障碍物、光线明暗变化明显、环境中纹理缺失等导致图像信息质量较差的情况下,利用IMU信息仍能得到有效的定位结果。
2023-09-07 16:57:061097 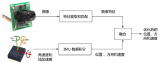
GO-SLAM主要还是基于NeRF进行稠密重建,可以发现相较于NICE-SLAM这些SOTA方案,GO-SLAM重建场景的全局一致性更好,这主要是因为它引入了回环和全局BA来优化累计误差。
2023-09-11 10:03:29685 
什么是激光雷达3DSLAM?在了解这个概念之前,我们首先需要弄懂什么是“SLAM”。SLAM,英文是SimultaneousLocalizationandMapping,意思是即时定位与建图。通俗
2023-11-25 08:23:57999 
目前视觉SLAM系统可以在微型个人计算机(PC)和嵌入式设备中运行,甚至可以在智能手机等移动设备中运行(Klein和Murray,2009)。与室内或室外移动机器人不同,自动驾驶车辆具有更复杂的参数,尤其是当车辆在城市环境中自动驾驶时。
2023-12-04 09:22:37545 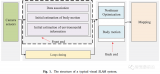
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论