 电子发烧友App
电子发烧友App


步距角精度:步进电机每转过一个步距角的实际值与理论值的误差。 用百分比表示:误差/步距角*100%。 不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
失步:电机运转时运转的步数,不等于理论上的步数。 称之为失步。
失调角:转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
最大空载起动频率:电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
最大空载的运行频率:电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
运行矩频特性:电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。
步进电机机座号:是指电机外形、安装尺寸的大小等等。 号码小的几座外形也小,号码数字大的外形也大。
步进电机选型:注意频率转速
1、步进电机一定时,供给驱动器的电压值对电机性能影响大,电压越高,步进电机能产生的力矩越大,越有利于需要高速应用的场合,但电机的发热随着电压、电流的增加而加大,所以要注意电机的温度不能超过最大限值
2、步进电机输入电压一般设置在步进点击额定电压的3~25倍,注意驱动器的允许电压范围
步距角:对应一个脉冲信号,电机转子转过的角位移。
以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A,转子齿为50齿电机为例,四拍运行时步距角为θ=360度/(50*4)=1.8度,八拍运行时步距角为θ=360度/(50*8)=0.9度。
细分倍数:将单个步距角进行细分,几倍就除以几。 例如:8倍的细分倍数就是在接收到8个脉冲后转动一个步距角1.8度。
二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72°。 在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己步距角的要求。 如果使用细分驱动器,则‘相数’将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。
频率:50HZ就是每秒50次,1/50就是每次所花的时间,20ms
转速:r/sHZ/(360/步距角)细分倍数r/minHZ60/(360/步距角)*细分倍数
接线:PUL接脉冲DIR接方向ENA接包扎
有些自动化设备中,如果在步进电机驱动器不断电的情况下要求可以用手动直接转动电机轴,就可以将Ena置低,使电机脱机,进行手动操作或调节。 手动完成后,再将Ena信号置高,以继续自动控制。
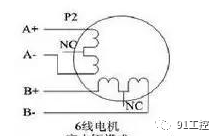
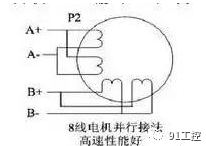
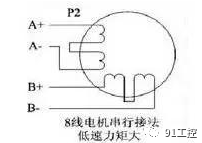
步进电机的接线:
四线点击和六线电机高速度模式:输出电流设成等于或略小于电机额定电流值;
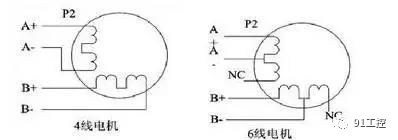
六线电机高力矩模式:输出电流设成电机额定电流的0.7倍;
八线电机并联接法:输出电流应设成电机单极性接法电流的1.4倍;
八线电机串联接法:输出电流应设成电机单极性接法电流的0.7倍。
步进电机分哪几种? 有什么区别?
步进电机分三种:永磁式(PM),反应式和混合式(HB)
永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;
反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪音和振动都很大。 在欧美等发达国家80年代已经淘汰。
混合式步进是指混合了永磁式和反应式的优点。 它又分为两相、四相和五相; 两相步进角一般为1.8度,而五相步进角一般为0.72度。 这种步进电机的应用最为广泛。
什么是保持转矩?
保持转矩是值步进电机通电但没有转动时,定子锁住转子的力矩。 它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。 保持转矩越大则电机大夫在能力越强。 由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机重要的参数之一。 比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。
步进电机的外表温度允许达到多少?
步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降甚至于丢失。 因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点; 一般来说,磁性材料的退磁点都在摄氏130度以上,因此步进电机外表温度在摄氏80-90度完全正常。
为什么步进电机的力矩会随转速升高而下降?
当步进电机转动时,电机各相绕组的电感将形成一个反向电动势; 频率越高,反向电动势越大。 在它的作用下,电机随频率(或速度)的增大而相电流减少,从而导致力矩下降。
如何用简单的方法调整两相步进电机通电后的转动方向?
只需讲电机与驱动器的A 和A-(或者B 和B-)对调即可。
审核编辑:汤梓红







 工商网监
工商网监
评论