 电子发烧友App
电子发烧友App


串激电机的原理
在交流电源供电时,产生旋转力矩的原理,仍可以用直流电动机的运转原理来解释。
当导体中有电流时,在导体的周围产生磁场,其磁力线的方向取决于电流方向。将通电的导体放入磁场中,这磁场与通电导体所产生的磁场相互作用,将使此导体受到一个作用力F,并因此而产生运动,导体会从磁力线密的地方向磁力线稀的方向移动,当将由两个互相相对的导体组成的线圈放入磁场时,线圈的两个边也受到了作用力,此二力的方向相反,产生力矩。
当线圈在磁场中转动时,相应的二个线圈边,从一个磁极下转到另一个磁极下时,此时由于磁场极性有了改变,将使导体受到的作用力的方向改变,也使转矩的方向改变,从而使线圈向反方向转动,于是线圈只能绕中心轴来回摆动。
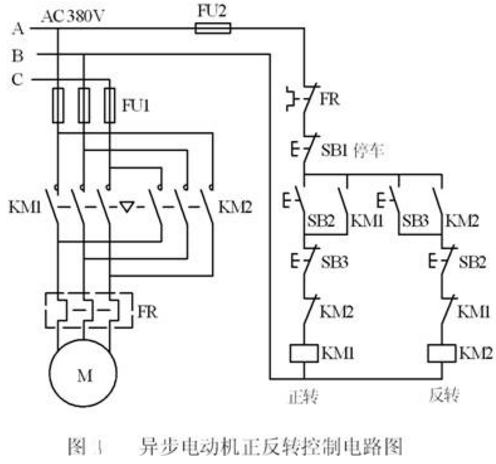
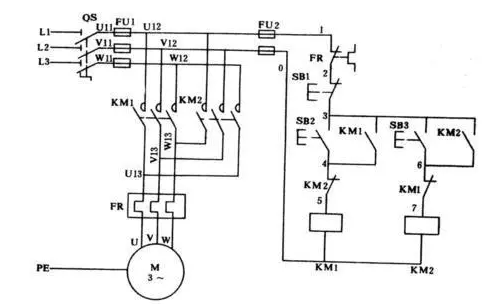
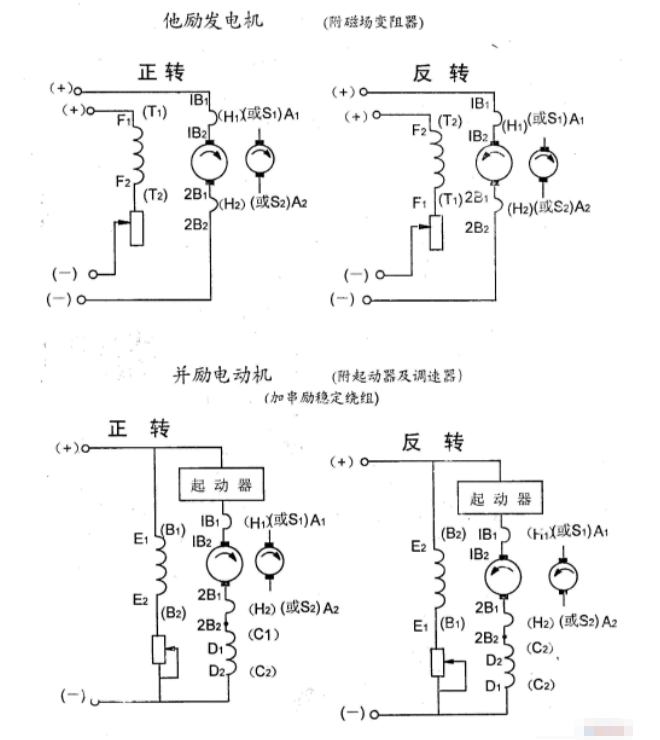
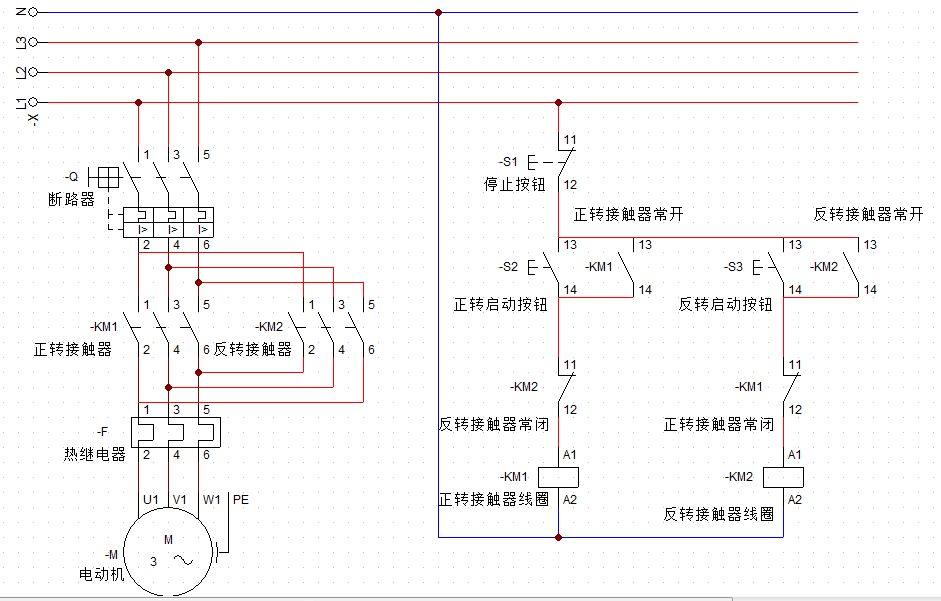
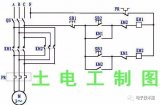
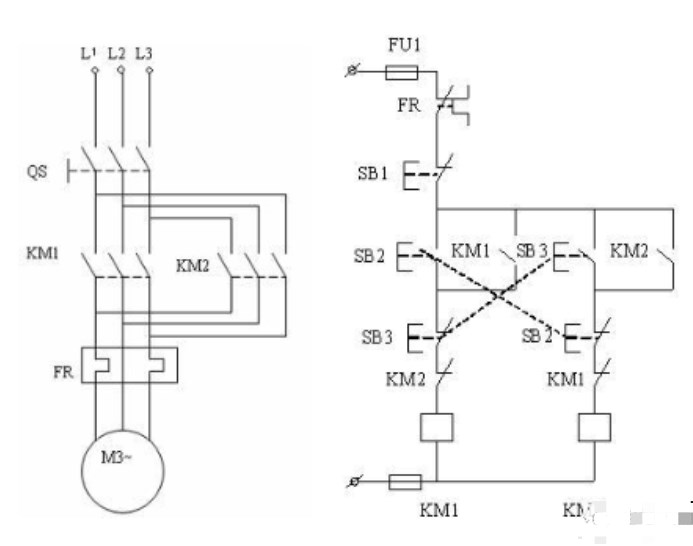
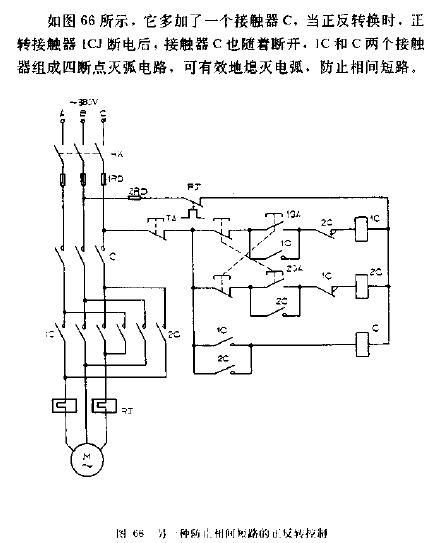
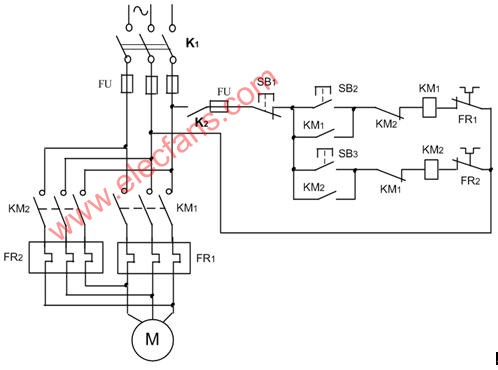
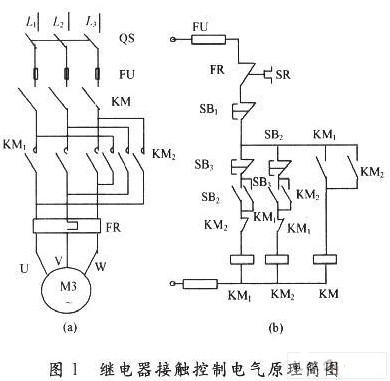
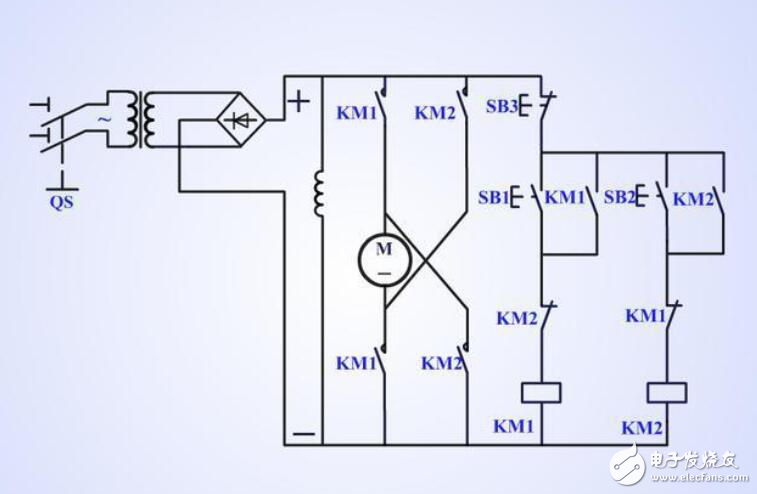
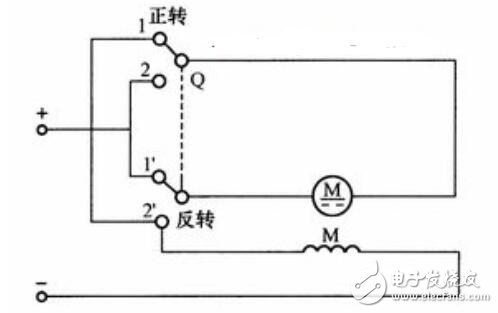
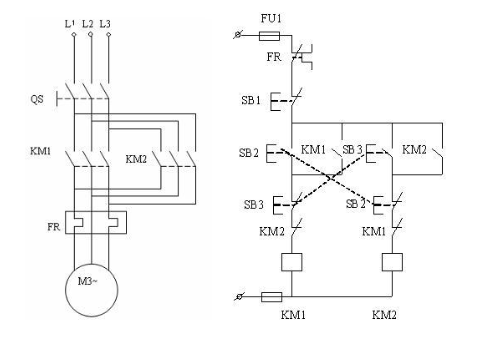
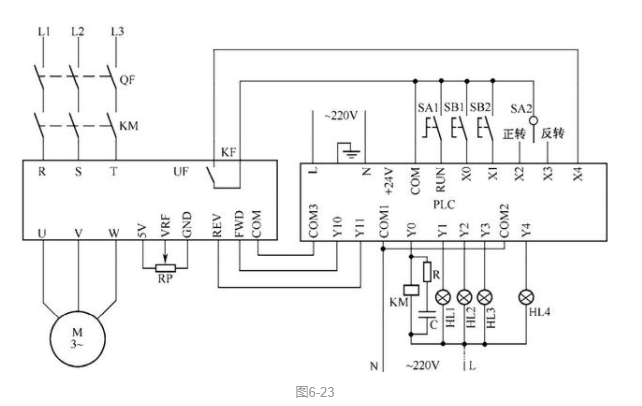
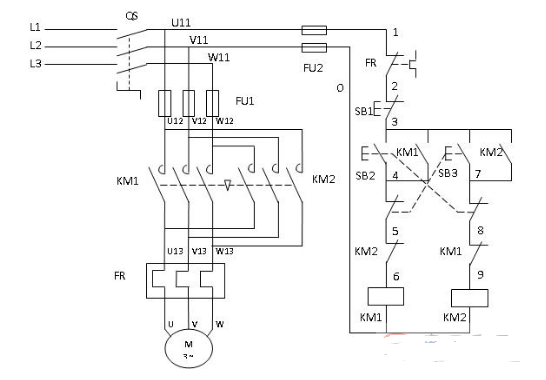
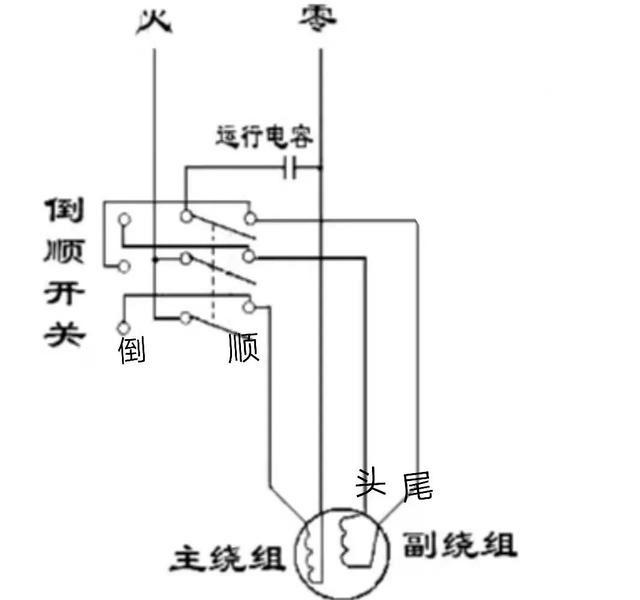
串激电动机的正反转原理与直流电机的正反转原理类似,都是通过改变电枢和励磁绕组之间的相对极性来实现的。具体来说,当串激电动机正转时,电枢和励磁绕组的极性相同,电枢中就会产生一个旋转磁场,与励磁磁场相互作用,产生转矩,从而驱动电机正常运转。而当电机反转时,只需改变励磁绕组的极性即可,使其与电枢的极性相反,从而产生反向的磁场,使电机反向旋转。
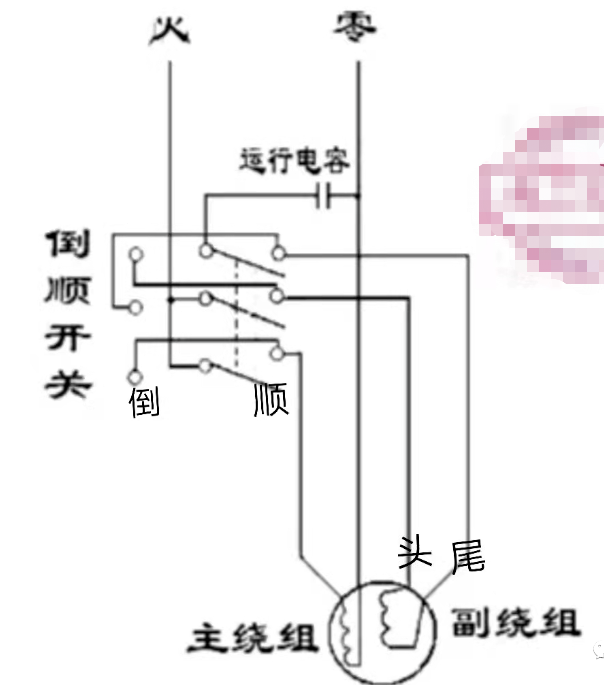
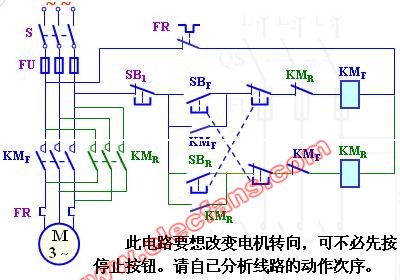
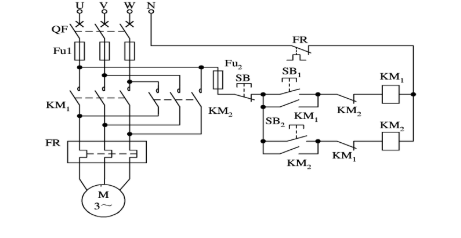
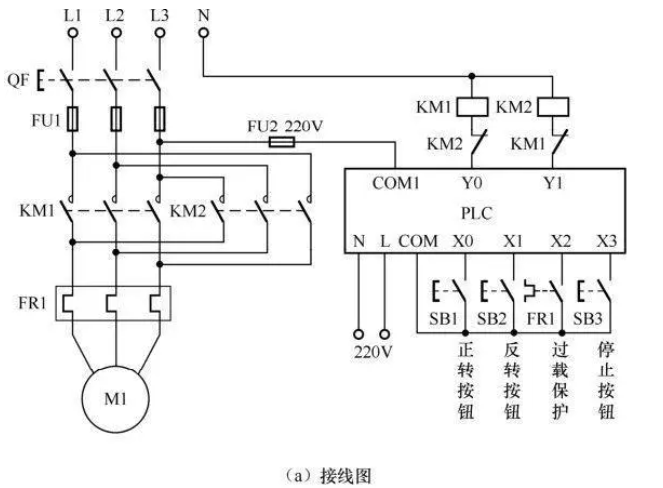
在实际应用中,可以通过多种方式实现串激电动机的正反转控制,例如:
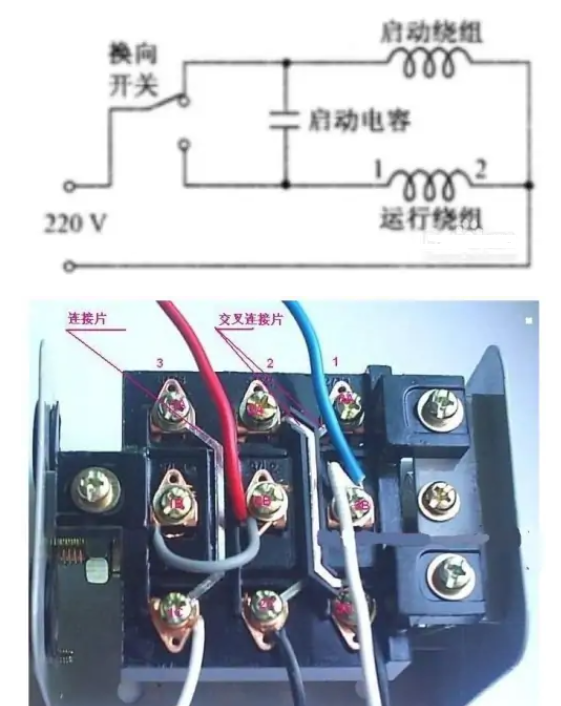
采用机械反转器,通过机械手动操作改变电机的极性,从而实现正反转控制;
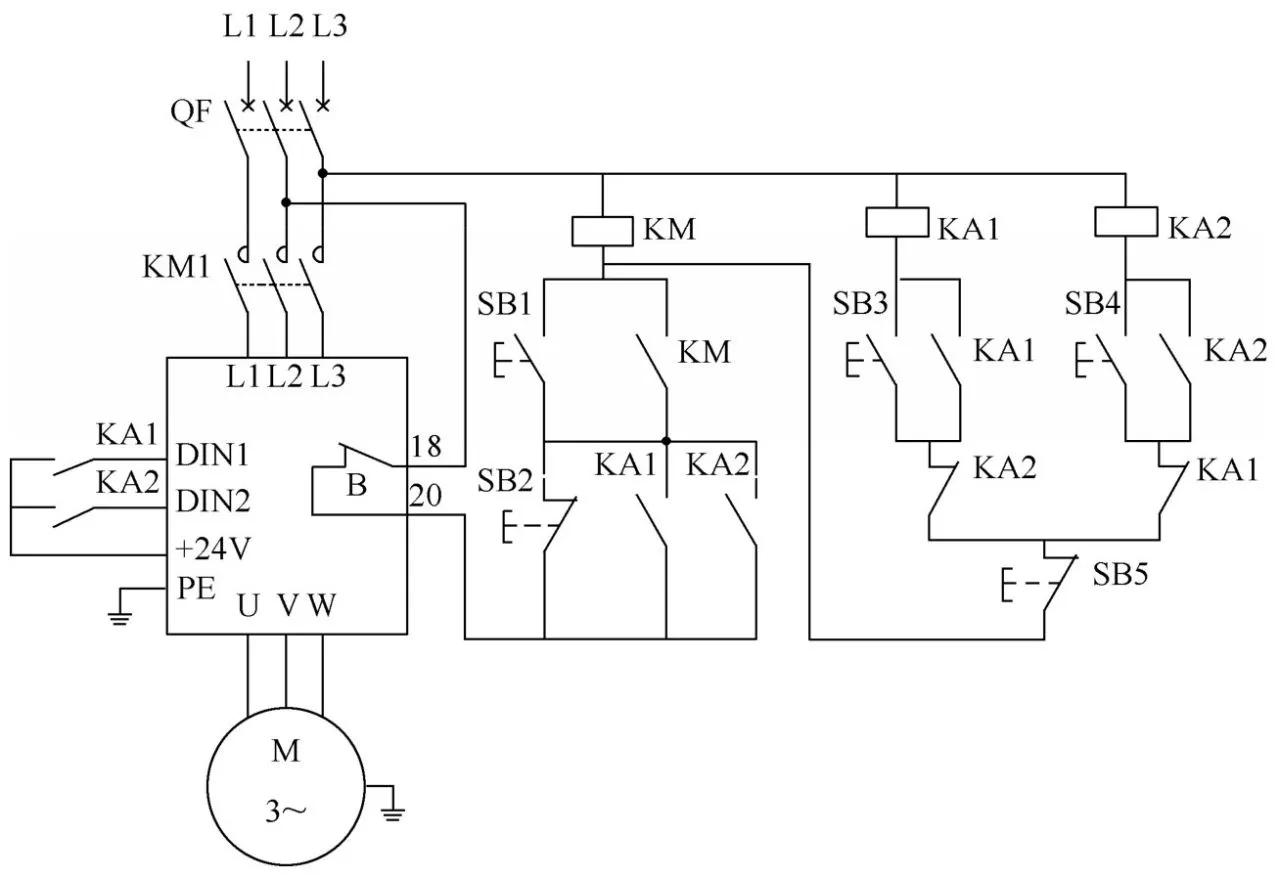
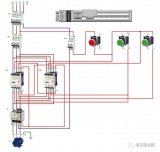
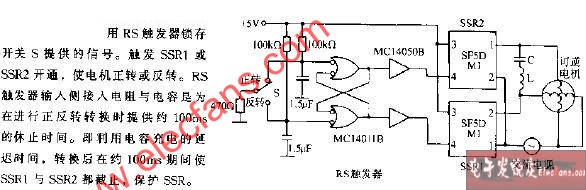
采用电子开关控制,通过开关的导通和断开来改变电机的电路连接方式,从而实现正反转控制;
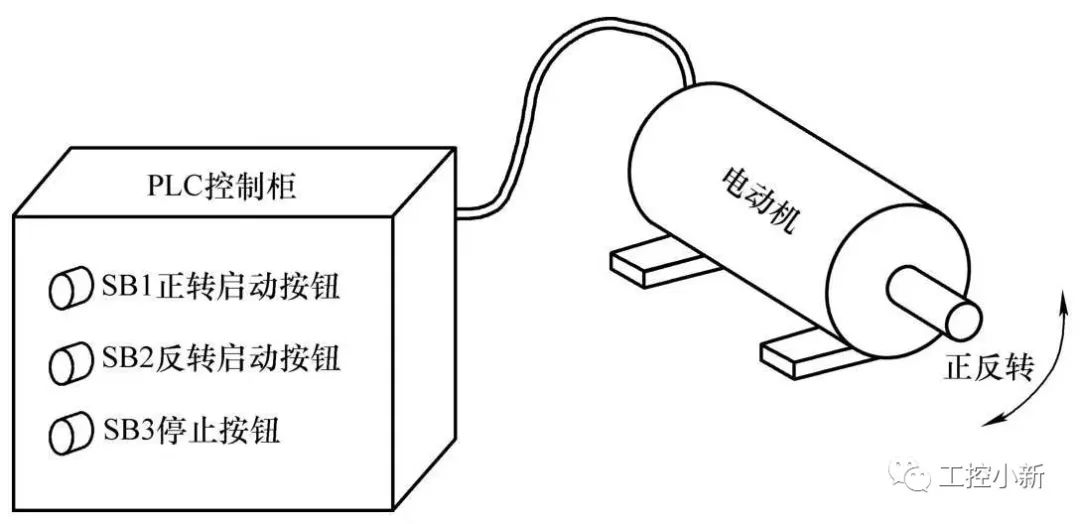
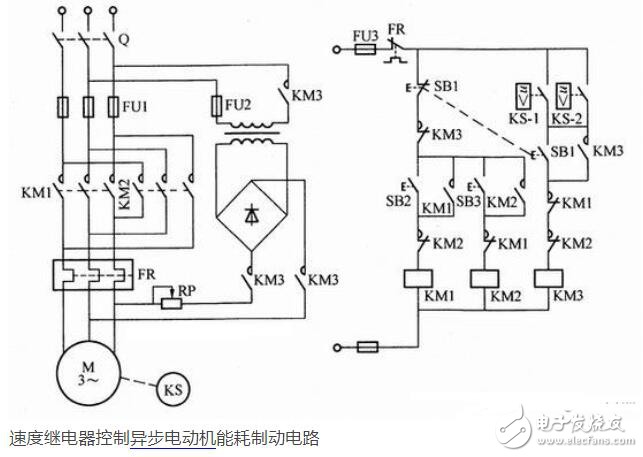
采用智能电机控制器,通过程序控制和调节电机的工作状态,实现精确的正反转控制和调速功能。
总之,串激电动机的正反转原理比较简单,但实现正反转控制仍需要考虑多种因素,例如电路连接、控制信号、转矩特性等,以保证电机的正常运行和安全性。在具体应用中,应根据实际情况选择合适的正反转控制方式和设备,以满足不同的工程需求和技术要求。
















 工商网监
工商网监
评论