流量、频响和精度是评价电液伺服系统好坏的重要指标。如何提高性能,满足各种应用场合,已经成为电液伺服系统研究中亟待突破的重要课题。
2023-01-13 17:41:08 4007
4007 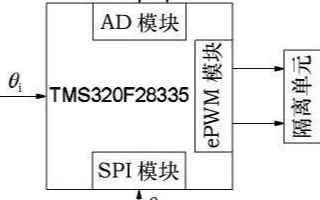
脉宽调制(PWM)一般用于控制电液比例阀。
2023-07-12 17:00:421970 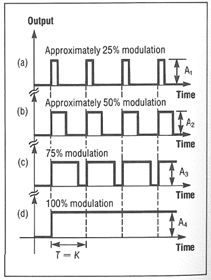
仿真研究。文献[ 2 ] 研究了基于RBFNN 的PID控制在电液位置伺服系统中的应用。文献[ 3 ]对电液位置伺服系统采用滑模变结构控制, 用最优控制理论设计滑模平面, 均取得了良好效果。但大量文献
2019-08-21 06:13:08
随着电液伺服控制理论的发展, 很多先进的控制策略被应用于电液伺服控制领域中。
2019-09-24 08:21:27
各位好,我在设计一个能驱动电磁先导的电液阀的芯片,输入电压DC12V。用MC33996可以吗?
2014-08-13 11:29:34
电液换向阀是电磁换向阀和液控换向阀的组合,它是用电磁换向阀控制液控换向阀的动作,变换流体流动方向的控制阀。电液换向主要用在流量超过电磁换向阀正常工作允许范围的液压系统中,对执行元件的动作进行控制,或对油液的流动方向进行控制。
2019-10-21 09:01:24
J13W-40P型仪表针型阀结构图及尺寸'产品图 详细说明
2008-06-15 22:06:21
本人新手,比如,对于伺服阀激励信号和采集回来的伺服阀输出流量信号,这两个数据如何处理,使一个为横坐标,一个为纵坐标!也就是是流量特性!其中是不是有数据回放 曲线输出环节!求高手指点!
2012-05-16 21:00:39
位置。出现所谓“满舵”现象。而使射流阀独特的“失效对中能力”完全规避了这一风险。成为安全生产的重要保证。 (3)稳定运作 704技术过硬,我们诚实的告诉您,704所电液伺服阀的返修率为百分之零点二。正是
2008-09-03 08:31:41
伺服阀的故障、原因及排除伺服阀的故障常常在电液伺服系统调试或工作不正常情况下发现的。所以这里有时是系统问题包括放大器、反馈机构、执行机构等故障,有时确是伺服阀问题。所以首先要
2008-09-03 08:32:30
控制系统的关键部件,用于位置、速度、加速度和力等的控制。经过几代人的不懈努力,本所生产的CSDY型射流管电液伺服阀已成为系列产品。我们的产品具有结构紧凑、体积小、寿命长、抗污染能力强、动态响应快、分辨率优
2008-09-22 14:09:09
控制系统的关键部件,用于位置、速度、加速度和力等的控制。经过几代人的不懈努力,本所生产的CSDY型射流管电液伺服阀已成为系列产品。我们的产品具有结构紧凑、体积小、寿命长、抗污染能力强、动态响应快、分辨率优
2008-10-06 14:58:59
交流伺服电机的结构图
2010-02-25 17:38:26
电机动态性能好,频响可以更高),对液压油的洁净度要求 NAS9级即可(而电液伺服网要求 NAS7甚至 NAS6)。因为直接采用了电液伺服阀的滑阀部分,所以进出油口的尺寸与伺服阀相同,非常方便替换现有
2025-06-19 10:59:58
提升式旋塞阀结构图 标准应用设计标准:API559,API 6D结构长度:ANSI B 16.10连接法兰:ANSI B16.5对焊端:ANSI B 16.25试验和检验
2008-06-15 22:00:00
旋塞阀结构图
2008-06-15 22:05:21
导读:新型电液阀控制隔离放大器内置智能化数显表,主要是针对电液阀和比例控制阀以及工业现场线性高精度模拟大驱动电流装置而设计,产品正常上电后不仅可以输出0-100mA/0-500mA/0-1A
2016-11-07 14:17:30
;>电磁阀结构图原理图</font></font><br/><br/>
2008-06-15 22:15:16
要设计一个电液伺服放大器电路驱动伺服阀,要求额定电流是40mA,但是要过载电流为流经力矩马达线圈最大电流之二倍,请问这个设计电路需要考虑过载电流吗,还是我设计的电路最大输出电流要达到80mA?
2015-06-12 10:53:29
一、用途 HS-YAW-500 型微机控制电液伺服压力试验机采用双柱式主机, 主要用于多种材料的压缩试验, 例如: 水泥、 混凝土、 各种建筑用砖、 橡胶垫、混凝土构件、 金属构件等
2021-05-28 10:54:28
电液阀比例阀线性调节显示控制线性隔离放大器:DIN ISO(SY) U(A)-P-A系列比例调节控制大功率隔离放大器是由多种模拟量隔离放大电路和高精度功率放大电路组成,主要用在比例阀、精密温控器
2021-12-20 16:00:05
针对电液伺服试验系统的复杂非线性和不确定性特性,提出一种基于小波变换的“主控制器”结合“参征器”的复合控制策略,并用于电液伺服试验系统的多变量控制。主控制器
2009-05-26 11:00:37 11
11 多通道电液伺服加载系统是用于大型构件的各种工程试验的高技术成套设备。本文针对多通道电液伺服加载系统的功能要求,提出了系统结构,完成了控制系统的硬件和软件设计。
2009-08-26 10:41:2318 电液伺服系统由于其具有非线性、时变参量多、难以精确建模等特点,采用传统控制理论并不能满足较高的控制精度。对此,本文设计出了一种基于混合维的云模型智能控制器,并
2009-08-27 09:11:466 典型电---气比例阀、伺服阀的工作原理 电---气比例阀和伺服阀按其功能可分为压力式和流量式两种。压力式比例/伺服阀将输给的电信号线性地转换为气体压力;流
2009-10-26 13:47:42149 本文主要研究了基于LabVIEW的电液伺服阀特性CAT系统的结构组成,动静态特性测试回路及其相应测试方法,也介绍了采用LabVIEW实现特性测试的虚拟仪器设计的结构、功能。
2010-03-02 12:20:5570 摘要:高速开关阀是电液伺服机构的惯性环节,伺服机构的品质依赖于阀的动态特性,因此阀的响应快速性很重要。提高高速开关阀的快速性,驱动电路是一个重要方面。采用2051单
2010-05-07 10:35:39115 伺服阀的工作原理
图2是伺服阀的工作原理图。
2008-11-19 16:21:1817905 伺服阀放大线路图
图为执行元件是液
2009-05-07 00:16:362773 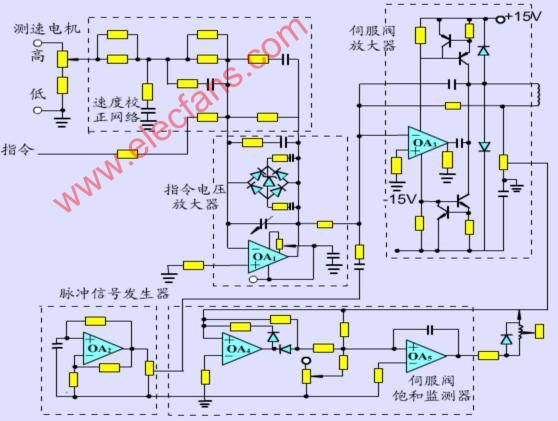
分布式阀控密封铅酸蔷电池的充电系统结构图
解决大批量大容量阀控密封铅酸蓄电池的充电问题,采用分布式系统是一种较好的办法.在分布式
2009-10-24 16:54:20530 电液伺服阀与比例阀
电液伺服与比例阀既是电液转换元件,又是功率放大元件。它能够将输入的微小电气信号转换
2009-10-25 09:54:463249 比例电磁阀工作原理
电液比例阀是阀内比例电磁铁输入电压信号产生相应动作,使工作阀阀芯产生位移,阀口尺寸发生改变并以此完
2009-10-26 18:57:0910774 光纤液位传感器原理及结构图
及
图9.5所示为基于全内反
2009-12-02 17:33:439222 伺服电机结构图
直流伺服电机结构示意图
2010-02-25 17:36:2610255 
摘要:阐述电液伺服控制系统的特点,提出一种高性能的电液伺服控制系统的设计方案。建立液压系统的数学模型,并进行控制系统软、硬件的设计。硬件部分采用TMS320LF2407 DSP芯片作为核心处理器,软件部分则采用具有先进智能性的模糊PID控制算法。利用MATLAB软
2011-02-28 17:18:3680 导弹电液伺服机构将作为总线上的一个节点挂接在总线上,因此必须设计一个将总线与电液伺服机构连接起来的接口。
2011-08-16 11:12:036851 
本文以实验室的电液位置 伺服系统 为研究对象,按照系统的控制要求,提出以ARM9(S3C2410)微处理器为核心的控制器对电液位置伺服系统进行控制的一种方案,设计了一种新型的基于ARM
2011-08-19 11:23:0851 为进行液压流体脉动的主动消振,设计了基于压电陶瓷的直接驱动伺服阀,并利用AMESim 液压仿真软件对其进行了建模与仿真,并在伺服阀实验台上对其进行了静态试验。仿真与试验结果表明
2011-08-24 14:49:2736 介绍了液控单向阀的工作原理、类别及应用注意事项,对正确使用液控单向阀避免事故的发生进行了举例说明。同时,也列出了液控单向阀常出现的故障、产生原因及排除方法。对于掌
2011-10-28 16:56:0662 超前和滞后校正选择禁忌 在电—液伺服系统中,经常采用串联滞后校正来提高低频段增益,提高系统的精度。
2011-12-16 17:02:231688 伺服阀异常动作引起高、中压调节阀运行中频繁出现无指令突然自行关闭和自行开启现象,严重影响机组的安全运行。
2012-02-27 10:40:303397 分析了脉冲宽度调制(PWM)控制电液比例阀的基本原理,采用C8051F340单片机设计控制电路,通过可编程计数器阵列(PCA)模块编程实现了变周期PWM信号的产生,通过达林顿晶体管阵列芯片实现
2013-09-25 16:31:49221 针对传统模拟测试方法在电液伺服系统性能测试方面的局限性,为全面、准确测试某型装备电液伺服系统的技术性能,科学评估装备维修后到的技术指标,需采用高新技术以达到高效、便捷的测试目的。通过应用当前测试领域
2016-01-04 15:10:490 电液伺服系统位置与压力控制转换过程的加减速算法与仿真
2016-05-03 14:23:268 电液伺服系统位置和力模糊切换控制方法_高炳微
2017-01-07 17:01:100 电液伺服驱动的连铸结晶器位移系统反步滑模控制_方一鸣
2017-01-07 17:53:502 基于DSP控制的电液位置伺服系统电模拟仿真研究
2017-10-19 14:33:268 为了实现对大规格链条节距一致性和环长要固定的需求,采用了一种基于PLC与电液伺服相结合的编环机设计方案,完成了自动编环工艺的改进和伺服放大电路的设计.j该系统主要通过PLC完成自动编环,针对环的宽度和长度,通过电液伺服控制系统进行精确控制,大大提高了系统的稳定性、精确度和生产效率。
2017-11-15 15:10:285 针对煤矿井下液压支架系统液压冲击大的问题,设计了一款新型大流量高水基电液比例换向阀。介绍了所研制的电液比例换向阀的结构及工作原理,并利用AMESim仿真软件搭建了该阀的仿真模型。研究表明,在斜坡信号
2018-03-05 15:51:121 伺服阀前置级流固耦合特性与伺服阀的稳定性、快速性、气穴和自激噪声的产生密切相关。为研究喷嘴挡板伺服阀前置级流场的瞬态气穴分布特性以及流场作用下挡板的位移特性,提出了伺服阀前置级流固耦合分析方法,采用
2018-03-08 11:14:400 电液伺服控制系统具有系统响应快、驱动传递简单、占用空间小、能够无级调速等诸多优点,广泛应用于工业设备。双喷嘴挡板伺服阀作为二级伺服阀之一,直接影响电液控制系统的稳定性。由于双喷嘴挡板伺服阀力矩马达
2018-03-10 11:21:252 电液比例阀是电液比例控制技术的核心和主要功率放大元件。输入指令电信号、成比例控制液压系统的压力、流量或方向等参数。其中,比例阀放大板又是控制比例阀正常T作的关键部件。随着电液比例阀的发展,国内外
2018-03-12 16:31:063 结构设计和控制系统方案上提出了自动化策略,研制了一套小流量电液伺服阀叠合量气动测量台,实现叠合量高精度测量的全过程自动化。通过实验和工程实践验证,该测量台的叠合量测量精度达到0.5 um,且重复精度达到0.5 um。
2018-03-12 16:33:530 伺服系统的主位置闭环内,以实现阀控缸系统位置和压力的主从控制。通过在MAT-LAB/Simulink中搭建的仿真模型,仿真分析该方法的控制效果,结果表明该控制方法正确可行。通过分析现场样机矫直钢板时液压缸的位置和压力信号,证明电液伺
2018-03-13 11:35:360 ,并阐述了系统的功能组成和工作原理。考虑了弹性负载的影响,建立了由伺服放大器、阀控非对称缸和弹簧负载模型等构成的电液位置伺服系统的传递函数模型。在此基础上,根据阀控非对称缸的输入电压与活塞输出速度之间的非
2018-03-13 15:38:061 液压支架是煤矿生产的关键设备,用来支护煤层顶板,维护安全作业空间,推移工作面采运设备。电液换向阀是液压支架的核心元件之一,在煤矿生产中通过控制电液换向阀的动作,完成液压支架的升降、移位等动作。电液
2018-03-19 14:48:170 电液伺服阀作为电液伺服控制系统中的关键元件,它的性能直接关系到整个系统的响应速度、控制精度和可靠性,因此对电液伺服阀设计理论和性能优化的研究已成为液压元件研究方面的热点。常用的两级电液伺服阀由前置
2018-03-26 15:03:360 本文首先介绍了数控液压伺服系统的组成,其次介绍了数控液压伺服阀的结构和工作原理,最后介绍了液压泵站,具体的跟随小编一起来了解一下。
2018-06-04 09:44:5218021 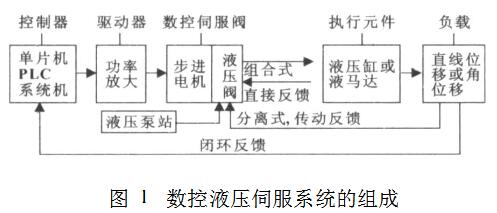
电液伺服控制技术作为连接现代微电子技术、计算机技术和液压技术的桥梁,已经成为现代控制技术的重要构成。由于它具有线性好、死区小、灵敏度高,动态性能好、响应快、精度高等显著优点,因而得到了广泛
2018-09-07 09:58:0018514 随着试验机技术的进步,近年来国内外电子液压万能试验机发展了3种不同控制方式:电液伺服阀控制、采用具有速度控制器的压力阀控制和宽流量范围的比例阀控制。电液倒服控制技术作为现代微电予技术、计算机技术和液压技术的桥梁,已经成为现代控制技术的重要组成部分。
2019-06-27 08:10:005691 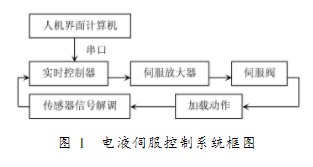
将 LabVIEW 应用在电液伺服阀计算机辅助测试(CAT)中,简化测试系统、提高测试系统的开发效率、增强系统的可扩展性,大大降低实验成本,从而加快电液伺服阀计算机辅助测试(CAT)系统的研制开发速度,是电液伺服阀测试实验的重要分支,也是未来电液伺服阀试验的发展趋势。
2018-12-31 08:34:004780 
的气嘴与簧片上的胶嘴相对,形成气道开关结构。本电磁阀依靠电磁力吸合,启动电流极小,工作稳定可靠,结构简单。
2018-09-07 16:56:4675605 电磁换向阀的基本工作原理是相同的,通过电磁铁控制滑阀阀芯的不同位置,以改变形油液的流动方向。当电磁铁断电时,滑阀由弹簧保持在中间位置或初始位置(脉冲式阀除外)。若推动故障检查按钮可使滑阀阀芯移动。接下来的四副图中:即图1、图2、图3和图4分别是不同通径的WE型电磁换向阀的结构原理图。
2018-09-07 17:06:4250286 今天为大家介绍一项国家发明授权专利——一种电液比例溢流阀。该专利由浙江工业大学申请,并于2016年11月30日获得授权公告。
2018-10-26 11:21:2712339 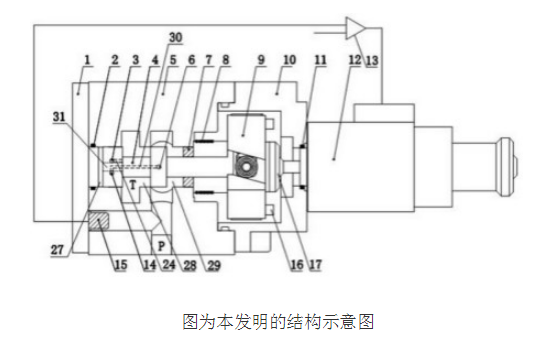
电液伺服机构作为导弹控制系统的执行机构,广泛用于各种型号的弹道式导弹上,它的响应速度和精度直接影响导弹的命中精度。对于电液伺服机构这样一个结构复杂、要求精密的武器装备,需要电路、液路和气路多方面
2018-11-18 09:59:002169 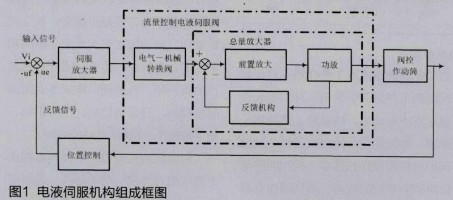
内平衡式热力膨胀阀由阀体、推杆、阀座、阀针、弹簧、调节杆、感温包、联接管、感应膜片等部件组成。
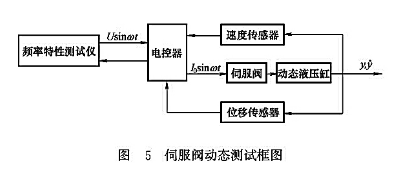
2019-04-02 16:03:4514597 如果可以用正弦测试信号激励设备并测量其输出,则频率响应测试方法可以应用于任何事物。在电液运动控制中,制造商为伺服和比例阀发布的数据中最常遇到频率响应。实际上,我之所以主张使用伺服阀和比例阀(而不是
2020-04-13 16:02:057588 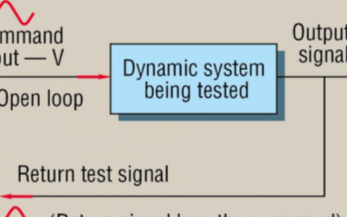
电液伺服系统是大型控制系统的执行机构,它的工作原理是根据控制系统的指令信号,通过电液伺服控制器来控制电液伺服阀的开度,进而控制油缸活塞的位置,来驱动执行机构,在工业领域有着广泛的应用。电液伺服控制器是电液伺服系统的重要组成部分,是完成各种伺服控制算法,实现电液伺服系统实时运动控制的关键。
2021-02-22 11:40:003229 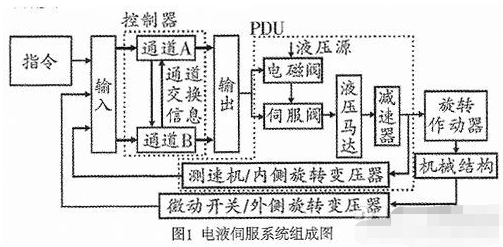
安全阀漏液原因分析 安全阀在一定压力下起密封作用,超过规定压力(开启压力)时安全阀自动打开放气,保证电池安全,造成安全阀漏液主要原因如下。 a、加酸量过多,电池处于富液状态,致使O2再化的气体通道
2020-09-08 10:55:474417 0. 引言电液伺服阀是电液伺服系统的关键元件和接口,具有控制精度高、响应速度快、输出功率大、结构紧凑等许多优点,已被广泛应用于军事工业和其他工业控制领域。伺服阀调试过程作为整个生产周期的最后环节,其关键环节质量控制对于保证伺服阀动、静态性能,提高工作稳定性和可靠性具有十分重要的意义
2020-12-25 01:49:263087 电液换向阀是机械设计及液压传动设计中常用的控件原件,电液换向阀既能实现换向缓冲,又能用较小的电磁铁控制大流量的液流,从而方便地实现自动控制,故在大流量液压系统中宜采用电液换向阀换向。 电液换向阀
2021-08-08 17:09:0617284 电液比例阀根据电子摇杆的比例信号对应改变比例阀的先导压力,从而改变滑阀的位置。 电液比例阀工作原理 当摇杆的信号与滑阀的位置行程比例不成立时,那么电子模块会发出纠错信号,驱动器带动换向阀滑阀自动回
2021-08-08 18:39:548767 MOOG穆格伺服阀G631系列两级电液伺服阀工作原理向力矩电机线圈输入一个电流指令信号,会产生电磁力作用在衔铁两端,带动弹簧管内的挡板偏转。挡板的偏转会降低某个喷嘴的流量,进而改变与这个喷嘴连通的阀芯一侧的压力,推动阀芯向一侧移动。
2021-09-06 15:25:152099 鸿承机力士乐电液换向阀工作原理当两个电磁阀线圈通电时,平衡孔回路关闭,泄流孔回路打开,活塞上腔泄压,活塞上行,阀门打开。
2021-10-11 09:29:144372 在试验机功能系统中,有一种叫做电液伺服,近日有很多朋友问试验机老二,电液伺服是一个怎么样的系统,接下来,试验机老二便给大家分享一下有关电液伺服相关的知识。
2022-08-09 11:04:415526 
作为采用电液伺服技术生产的疲劳试验机,电液伺服疲劳试验机是以恒压伺服泵站作为动力源的一类疲劳试验机的总称,根据试验装置-作动器的不同,可分为电液伺服疲劳试验机和电液伺服扭转疲劳试验机两种。
2022-09-14 14:48:081624 
控制HOYEA华液液压比例阀放大器是一种用来对比例电磁铁提供特定性能电流,并对电液比例阀或电液比例控制系统进行开环或闭环调节的电子装置。它是电液比例控制元件或系统的重要组成单元。一个完整的电液比例
2022-11-04 13:13:05927 
761电液伺服阀作三通和四通节流型流量控制阀,四通阀时控制性能更好。该系列阀为高性能的两极电液伺服阀,在7Mpa额定压降下的额定流量为4L/min至63L/min。阀的先导级是一个对称的双喷嘴挡板阀
2022-11-11 09:03:36757 
电液伺服控制系统由液控单元、伺服油缸、动力油占三大部分组成。液控单元包括调速阀控制单元和透平静叶控单元,每一单元均由电液伺服阀、点动用电磁阀、快关用电磁阀、油路块及底座等组成。伺服油缸为双活塞杆结构,摩擦力很小,密封性能良好。动力油站由油箱、变量油泵、滤油器、冷却器、管道阀门、检测仪表等组成。
2022-12-15 10:42:561653 
G631系列两级电液伺服阀在电气液压伺服系统中作为执行元件,在伺服系统中液压执行机构同电气及气动执行机构相比,具有快速性好、单位重量输出功率大、传动平稳、抗干扰能力强等特点。另一方面,在伺服系统中
2022-12-15 13:03:45485 
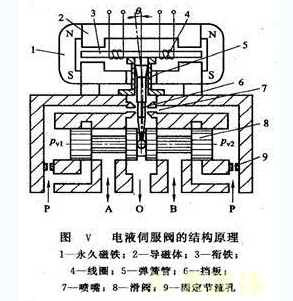
电气一机械转换器,可产生与电指令信号成比例的旋转运动,用在伺服阀的输入级。力矩马达包括电
气线圈、极靴和衔铁组件等。衔铁、挡板和反馈杆钢性固接,并由固接在衔铁上的薄壁弹簧管支撑,弹簧管
下端
2023-02-14 09:39:344755 电液伺服阀是一种控制液压流量和压力的电液转换器。它的工作原理是通过电气信号控制阀芯的位置和开度,从而调节液压系统中的流量和压力,实现液压执行器的精确运动控制。
2023-03-12 09:55:5510163 电液伺服阀是电液伺服控制中的关键元件,它是一种接受模拟电信号后,相应输出调制的流量和压力的液压控制阀。电液伺服阀具有动态响应快、控制精度高、使用寿命长等优点,已广泛应用于航空、航天、舰船、冶金、化工等领域的电液伺服控制系统中。
2023-03-12 09:57:166538 电液伺服阀是一种将电气信号转化为液压能量,通过控制液体的流量和压力来实现机械运动控制的液压阀。它是一种集电气、机械、液压等多种技术于一体的高科技产品,广泛应用于各种工业自动化领域。电液伺服阀的主要特点是控制精度高、响应速度快、动态性能好等。
2023-03-12 09:59:383015 电液伺服阀是一种电液转换器,它通过电气信号控制液压流量和压力,使得液压执行器(例如液压缸或液压马达)能够实现精确的运动控制。
电液伺服阀的主要作用包括以下几个方面:
控制液压流量:电液伺服阀通过控制阀芯的位置和开度,调节液压系统中的流量,从而实现精确的液压流量控制。
2023-03-12 10:01:524563 电液伺服阀由于其高精度和快速控制能力,除了航空航天和军事装备普遍使用的领域外,在机床、塑料、轧钢机、车辆等各种工业设备的开环或闭环的电液控制系统中。特别是系统要求高的动态响应、大的输出功率的场合获得了广泛应用。
2023-03-12 10:18:483623 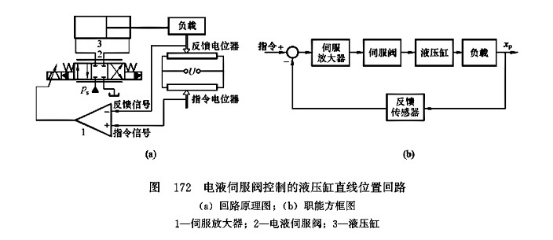
电液伺服阀的输出流量或压力是由输入的电信号控制的,主要用于高速闭环液压系统中,用以实现位置、速度和力的控制等;而比例阀多用于响应速度相对较低的开环控制系统中。
2023-03-12 11:08:403150 电液伺服万能试验机是一种具有高精度、高可靠性和高稳定性的测试设备,其应用范围广泛,可以用来测试各种材料的力学性能。
2023-04-25 14:30:022240 
RT-SAM-2X伺服阀放大器是一种专门用于控制伺服阀的高性能放大器。它由微控制器、功率放大器和伺服阀组成,能够为伺服阀提供精确、稳定的电流信号,从而实现对液压系统的精确控制。
2023-05-11 08:36:14715 
电液伺服疲劳试验机是一种应用广泛的测试设备,具有控制精度高、频率响应快、动态性能好等特点。消费者在购买电液伺服疲劳试验机时需要考虑产品类型、购买渠道、厂家信息和定制需求等多个方面因素,以选择适合自己的产品。同时,厂家也需要不断提高产品质量和售后服务,以满足市场需求。
2023-06-17 15:01:491317 电液伺服疲劳试验机具有广泛的应用领域和优异的性能,市场上有许多著名的品牌厂家,为客户提供标准型试验机、定制服务和批发服务。在进行电液伺服疲劳试验机采购前,客户需要考虑到自己的测试需求、预算和生产规模等方面的问题,并关注试验机的质量、售后服务和订做费用等方面的问题,以获得最优的测试结果和购买体验。
2023-06-17 16:33:071175 
电液伺服试验机是一种高性能的试验设备,具有广泛的应用领域和良好的发展前景。通过了解电液伺服试验机的行业标准、工作原理、测量对象、检定规程、生产厂家、选购注意事项和应用案例,我们可以更好地理解和应用这种试验设备,为工程科研和产品开发提供有力支持。
2023-06-18 14:27:531601 
膨胀阀工作时,可以应用伺服电机的以下几种运动模式: (1)位置控制:通过伺服电机的位置控制功能,可以精确地控制膨胀阀的开度。根据系统需求,可以设定目标位置,并使用闭环反馈控制来实现准确的位置控制
2023-08-25 08:35:01769 
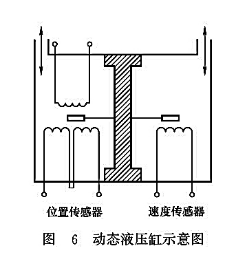
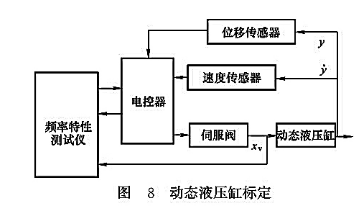
水压伺服阀作为现代液压系统中不可或缺的控制元件,其动态性能对系统稳定性、响应速度和控制精度至关重要。为了准确评估水压伺服阀的动态性能,需要借助专业的测试设备进行测试。泰克信号发生器凭借其强大的波形
2024-08-30 15:37:54883 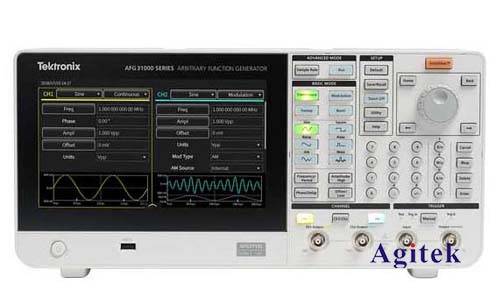
燃油伺服阀试验台是航空维修与制造领域的关键测试设备,专门用于检测、校准和维修燃油伺服阀,确保其在航空发动机燃油控制系统中的精确性和可靠性。伺服阀作为燃油系统的核心控制元件,其性能直接影响发动机的推力
2025-09-25 11:14:57501 
航空电液伺服阀作为飞行器舵面、起落架及刹车等高可靠性操控机构的核心控制元件,其性能直接决定了飞行控制的精准性、响应速度与飞行安全。传统两级伺服阀(如喷嘴挡板式)因结构复杂、工艺要求苛刻、抗污染能力弱,已成为机载液压系统故障的主要来源之一。
2025-12-23 10:02:32150 
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论