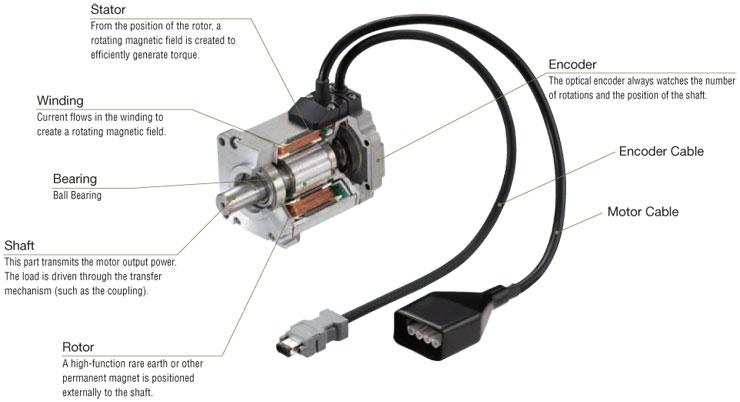
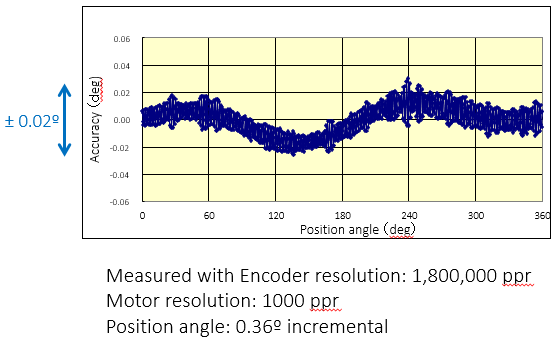
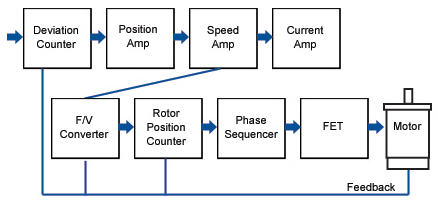
,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)也就是说伺服电机本身具备发出脉冲的功能,它每旋转一个角度,都会发出对应数量的脉冲,这样伺服驱动器和伺服电机编码器的脉冲形成了呼应,所以它是闭环控制,步进电机是开环控制。
2023-06-13 11:18:39 2755
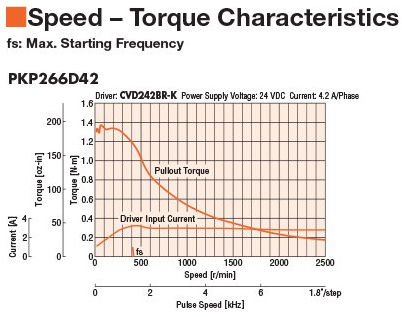
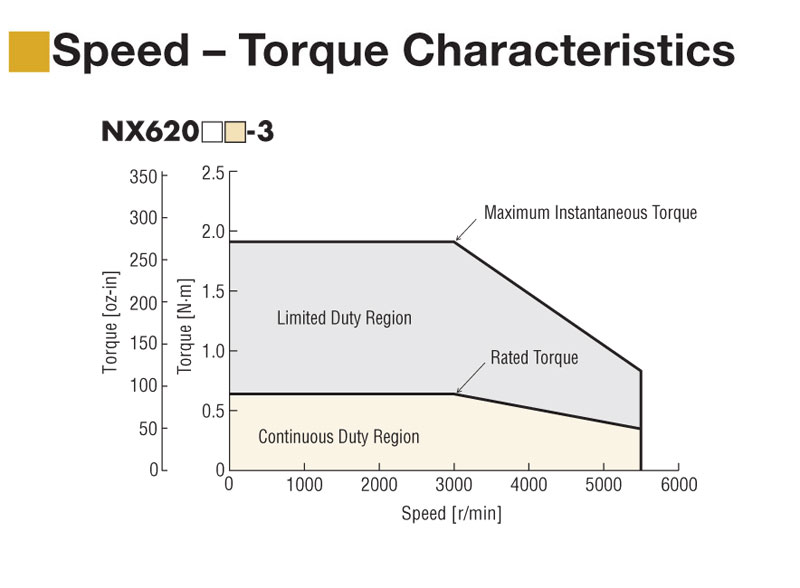
2755 步进电机和伺服电机的性能差异源自他们不同的电机设计方案。步进电机的极数比伺服电机多得多,因此步进电机旋转一整圈,所需的绕组电流交换次数要多得多,从而导致在速度增加的情况下,其转矩迅速下降。
2023-07-13 10:53:452379 
怎样选择步进和伺服电机?如何配用步进电机驱动器?2相和5相步进电机有何区别,如何选择?何时选用直流伺服系统,它和交流伺服有何区别?步进和伺服电机可以拆开检修或改装吗?
2021-10-29 07:20:12
伺服电机与步进电机的不同点是什么?
2021-09-29 06:04:52
什么是伺服电机?什么是步进电机?伺服电机可以代替步进电机使用吗?它们有什么区别吗?
2021-10-08 06:29:03
伺服电机和步进电机有何区别?
2021-10-12 08:50:59
倍速链输送具有哪些优点?伺服电机和步进电机的控制方式有何区别?伺服电机和步进电机的过载特性有何区别?
2021-10-11 06:31:15
伺服电机和步进电机的部分原理有什么差异?
2021-09-30 07:17:22
伺服电机的缺点有哪些?闭环步进电机的优点有哪些?伺服电机和闭环步进电机有哪些不同之处?
2021-09-27 07:58:29
伺服电机是指什么?其主要特点是什么?伺服电机与步进电机的使用性能有何不同?与其他电机(如步进电机)相比,伺服电机的优点是什么?
2021-06-28 07:16:37
伺服电机跟步进电机的区别
2013-08-22 17:44:08
步进电机/伺服电机/舵机有什么区别?
2021-09-26 08:08:45
步进电机是什么?舵机是如何工作的?伺服电机地控制原理是什么?
2021-09-28 08:55:25
步进电机与伺服电机对比分析采用闭环技术的步进电机
2021-02-05 06:05:47
步进电机与伺服电机有什么特点?步进电机与伺服电机区别是什么?
2021-09-26 08:32:07
步进电机与伺服电机有哪些区别?
2021-09-29 08:05:05
步进电机与伺服电机的区别是什么?如何选型?
2021-09-27 09:10:44
步进电机的工作原理是什么?伺服电机的工作原理是什么?步进电机与伺服电机有哪些区别?
2021-09-30 07:56:28
步进电机和伺服步进电机的区别是什么?
2021-10-11 08:36:56
步进电机和伺服电机不是表亲吗?都是控制电机,控制转速啊,角度啊什么的?在应用上面有什么具体的区别吗?
2016-01-25 09:36:32
步进电机和伺服电机控制的方式有何不同?步进电机和伺服电机的低频特性有何不同?
2021-09-28 07:55:48
什么是步进电机?伺服电机又是什么?步进电机和伺服电机有哪些区别?
2021-09-27 08:10:04
步进电机和伺服电机是怎样接线的?步进电机和伺服电机有哪几种接线方式?
2021-09-26 08:00:08
步进电机和伺服电机的主要区别在哪里?步进电机与伺服电机的不同之处主要表现在哪里呢?
2021-09-28 08:42:09
步进电机具有哪些优点缺陷?伺服电机的优缺点是什么?
2021-10-13 06:12:12
步进电机和伺服电机的区别是什么?它们之间有哪些联系?
2021-10-08 08:31:51
请问一下步进电机和伺服电机的区别有哪些?
2021-09-30 08:43:00
步进电机和交流伺服电机性能比较
2019-10-29 09:02:04
伺服电机和步进电机的区别是什么?步进电机和交流伺服电机的性能有什么区别?步进电机具有哪些特性参数?
2021-09-29 07:05:46
步进电机是什么?交流伺服电机是什么?步进电机和交流伺服电机的性能有何不同?
2021-09-28 07:47:27
什么是步进电机?步进电机的控制原理是什么?步进电机有哪些分类?具有哪些型号参数?步进电机怎么选择?如何使用?
2021-10-27 06:20:45
步进电机是什么?步进电动机是由哪些部分组成的?步进电机的工作原理是什么?怎样去选择步进电机?
2021-10-08 08:16:24
步进电机和伺服电机有哪些优缺点?步进电机相比伺服电机具有哪些优点?
2021-09-26 06:54:25
伺服电机与步进电机相比有哪些优势?选择伺服电机要考虑哪些因素?
2021-09-29 06:07:32
PLC步进电机指令可以控制伺服电机么? 也就是步进电机指令和伺服电机指令有区别吗?
2023-03-30 17:34:11
PLC步进电机指令可以控制伺服电机么? 也就是步进电机指令和伺服电机指令有区别吗?
2023-03-30 17:34:10
如何正确选择伺服电机和步进电机?选择步进电机还是伺服电机系统?通过通讯方式直接控制伺服电机可以实现吗?如何为应用选择适当的供电电源?使用直线电机比滚珠丝杆的线性电机有何优点?
2021-11-01 07:04:55
如何正确选择伺服电机和步进电机?答:主要视具体应用情况而定,简单地说要确定:负载的性质(如水平还是垂直负载等),转矩、惯量、转速、精度、加减速等要求,上位控制要求(如对端口界面和通讯方面的要求...
2021-09-01 07:04:39
正确选择伺服电机1,如何正确选择伺服电机和步进电机? 主要视具体应用情况而定,简单地说要确定:负载的性质(如水平还是垂直负载等),转矩、惯量、转速、精度、加减速等要求,上位控制要求(如对端口界面
2021-09-17 08:37:16
如何正确选择伺服电机和步进电机?选择步进电机还是伺服电机系统?如何配用步进电机驱动器?2相和5相步进电机有何区别,如何选择?何时选用直流伺服系统,它和交流伺服有何区别?
2021-11-15 07:46:57
步进电机和伺服电机有什么区别1, 怎样选择步进和伺服电机? 主要视具体应用情况而定,简单地说要确定:负载的性质(如水平还是垂直负载等),转矩、惯量、转速、精度、加减速等要求,上位控制要求(如对端口界面和通讯方面的要求),主要控制方式是位置、转矩还是速度方式。供电电源是
2021-09-01 06:16:30
步进电机和伺服电机的控制精度有何区别?步进电机和伺服电机的低频特性有何区别?
2021-09-30 08:23:52
激光切割机伺服电机与步进电机的差别是什么?伺服和步进电机的原理是什么?伺服和步进电机的区别是什么?
2021-09-29 07:13:08
步进电机是什么?伺服电机又是什么?步进电机和伺服电机的区别在哪?
2021-09-28 06:05:31
步进电机,舵机,伺服电机的区别?
2023-06-19 11:50:02
请问一下伺服电机与步进电机的区别是什么?
2021-10-09 08:02:34
伺服电机具有哪些缺陷?闭环步进电机与伺服电机对比分析哪个好?
2021-09-27 08:13:44
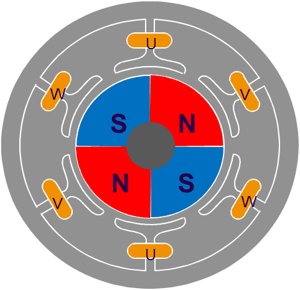
伺服电机步进电机区别
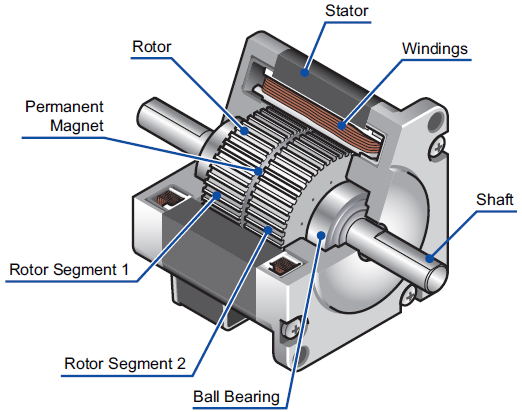
伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机
2010-01-09 20:24:1236470 步进电机和伺服电机 步进电机是一种离散运动的装置,它和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电
2010-01-11 08:39:211407 步进电机和交流伺服电机性能比较
步进电机和交流伺服电机性能比较 步进电机是一种离散运动的装置,它和现代数字控制技术有着本质的联系。在目前国内的数字
2010-02-06 10:25:441089 电机类调速器分为两种1.步进电机2.伺服电机。在基于间接数字控制模式的调速器中,全数字式交流伺服电机调速器比步进电机具有优越性。
2012-01-10 15:34:215237 步进电机与伺服电机在工业控制中应用非常广泛,过程中不乏出现各种各样的问题,例如如何正确选择伺服电机和步进电机?何时选用直流伺服系统,它和交流伺服有何区别?使用电机时要注意的问题?伺服电机的码盘部分可以拆开吗?等等。。。
2017-09-05 10:54:30 18
18 本文首先介绍了步进电机和舵机及伺服电机的区别,其次介绍了步进电机基本原理,最后介绍了舵机的构造的原理及介绍了伺服电机的工作原理。
2018-05-11 08:45:27134441 本文首先介绍了步进电机和伺服电机的性能比较,其次介绍了伺服电机对比步进电机的优势,最后阐述了电机的选用原则以及如何正确选择伺服电机和步进电机,具体的跟随小编一起来了解一下。
2018-06-01 15:46:4619012 由于印刷机械的自动化、规范化和数据化的迅速发展,印刷机械对微型电动机的需求越来越多。目前在印刷设备中应用较广的步进电机、伺服电动机和测速发电机这三种电动机。此篇详细介绍步进电机和伺服电机。
2020-02-24 08:57:243180 最简单的方法是在负载轴上增加一个杠杆,用弹簧秤拉动杠杆,拉力乘以臂的长度就是负载力矩。也可以根据负载特性进行理论计算。由于步进电机是控制型电机,目前常用的步进电机最大转矩不超过45nm。
2020-08-08 09:19:002473 在许多领域都需要各种电机,包括知名的步进电机和伺服电机。但是,对于许多用户而言,他们不了解这两种电机的主要区别,因此他们始终不知道如何选择。那么,步进电机和伺服电机之间的主要区别是什么? 基本结构
2020-09-10 17:47:3430268 步进电机和伺服电机的辨别方法如下:力矩范围:步进电机系统一般为中小力矩(一般在40Nm以下)范围;伺服电机系统可实现全范围。
2020-09-11 10:27:1710007 步进电机和伺服电机的区别办法如下:力矩计划:步进电机系一同般为中小力矩(通常在40Nm以下)计划;伺服电机体系可完毕全计划。
2020-09-25 10:15:3311186 步进电机和伺服电机在工业传动控制领域都是重要的控制部件,应用面广泛。但是步进电机和伺服电机有什么不同呢?
2020-12-14 21:28:356038 现如今是科技发展迅猛的时代,人们在选择直线模组时都会疑惑到底选择伺服电机还是步进电机。 直线模组是一种自动化直线传动设备,但它本身不具备驱动力,需要额外的驱动设备进行驱动,来实现整个直线模组的运转
2021-01-11 11:35:375609 步进电机和伺服电机是常见的工业电子装置,通常被应用在工业自动控制系统中,然而许多人不知道如何 辨别步进电机和伺服电机,在这篇文将分享步进电机和伺服电机的辨别方法及区别,希望对读者有所帮助。
2021-07-19 14:33:3943293 步进电机的外观看起来要比伺服电机更粗糙一些。
2021-08-26 16:47:4123599 要想区分伺服电机和步进电机,先要了解两种设备的区别。接下来给大家分享一下。
2021-10-02 11:32:0056279 伺服电机和步进电机有什么不同?伺服电机是在伺服系统中控制机械元件运转的发动机。步进电机是将电脉冲信号转换成相应角位移或线位移的电动机。两种设备在工业自动化控制中有着非常广泛的应用。
2022-01-04 19:43:2937540 无论是步进电机,还是伺服电机,它们都为现代化的工业生产立下了不朽的功劳。但正所谓文无第一,武无第二,强强相遇,还是要分个高下的。下面,我们就从这几个维度对比下步进电机以及伺服电机,看看我们在实际工作中选择哪个更为合适。
2022-04-27 13:31:007426 伺服电机和步进电机都可以达到高精度的要求,但是伺服电机通常比步进电机具有更高的精度。这是因为伺服电机采用了闭环控制系统,可以通过实时的反馈控制,准确地控制电机的位置、速度和转矩等参数,从而保证了更高的控制精度。同时,伺服电机具有更高的响应速度和更好的动态性能,可以在更短的时间内响应和调整输出参数。
2023-03-07 15:05:096922 步进电机和伺服电机都是常见的电动机种类,它们有着不同的工作原理和应用场合。
步进电机是一种定角度运转的电动机,它的转动是根据外部提供的脉冲信号来实现的。步进电机具有精度高、控制简单、适合低速运动等特点,适用于需要高精度定位控制的场合,如印刷机、绘图仪、数码相机等。
2023-03-07 17:59:046815 步进电机的惯量选择需要考虑到两个方面:
电机本身的惯量:电机的惯量越大,电机的加速和减速所需要的时间就越长。因此,在选择步进电机时,需要根据应用需求和控制系统的要求综合考虑电机的惯量
2023-03-08 14:26:406758 步进电机和伺服电机是两种常见的电机类型,它们的应用场景和控制方式不同,下面是它们的区别和选型方法:
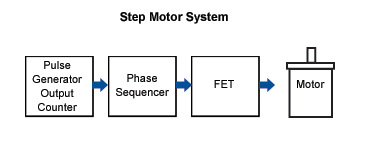
步进电机是一种开环控制电机,控制信号为脉冲信号,通过控制脉冲数量和频率来控制电机的位置和运动。步进电机具有简单的控制方式、低成本和较高的精度,但通常不能提供高速运动和高负载扭矩。
2023-03-08 14:40:452970 步进电机的旋转角度是由控制信号驱动,每个控制信号都会使步进电机转动一定的角度,因此步进电机的运动是“离散”的。而伺服电机则是通过控制电机的电流或电压来控制电机的旋转角度,因此伺服电机的运动是“连续”的。
2023-03-09 10:44:596550 一般情况下,伺服电机的精度要高于步进电机。伺服电机可以根据反馈信号实时调整输出的电流和位置,能够更加精准地控制位置和速度。而步进电机只能按照预设的步数和速度运转,难以在高速和负载变化的情况下保持稳定的精度。然而,在低速、低负载、短行程等应用场景下,步进电机也可以达到较高的精度。
2023-03-09 10:45:5811422 步进电机和伺服电机都是常见的电机类型,它们在各种工业和商业应用中都有广泛的应用。
2023-03-09 14:22:327252 步进电机作为一种开环控制的系统,和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中
2023-03-21 14:55:020 在定位系统中,最常用的电机不外乎是步进电机和伺服电机,其中步进电机主要可分为2相、5相、微步进统,伺服电机则主要分为DC伺服和AC伺服两种。
2相、5相和微步进系统主要是驱动器所表现出来分辨率
2023-03-22 10:38:503 步进电机和伺服电机哪个好,这个没有绝对的答案,适合的才是最好的!下面从步进电机和伺服电机各种的优缺点、性能特点
进行分析:
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成
2023-03-23 11:07:326 选择步进电机时首先要考虑各种步进电机的优缺点,根据设备的具体要求选择合适的电机。
2023-05-22 09:06:04683 步进伺服和步进电机都是一种设备,但它们的工作原理和控制方式有所不同。 步进电机是一种常见的电动机,其工作原理是通过交替通电使电机转子按照一定的步距旋转。步进电机通常采用开环控制方式,即根据输入的脉冲
2023-06-13 08:30:021520 步进电机是一种离散运动的装置,它和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中
2023-01-11 17:58:341820 
选择步进电机时首先要考虑各种步进电机的优缺点,根据设备的具体要求选择合适的电机。在这里先介绍不同相数的步进电机的优缺点:
2023-07-21 17:27:111477 在直流电机,伺服电机和步进电机之间进行选择是一项艰巨的任务,包括在众多设计因素之间取得平衡,即成本,速度,转矩,加速度以及驱动电路,在选择最佳方案时都起着至关重要的作用。您的应用的电动机。
2023-07-09 16:22:086012 
选择防爆电机类型,是根据具体应用需求和系统要求而定。以下是防爆伺服电机和防爆步进电机的一些特点和比较,以帮助您做出选择。防爆伺服电机优点:高精度和高动态响应:伺服电机具有闭环控制系统,可以实现更精
2023-07-31 22:29:061322 在许多领域都需要各种电机,包括知名的步进电机和伺服电机。但是,对于许多用户而言,他们不了解这两种电机的主要区别,因此他们始终不知道如何选择。那么,步进电机和伺服电机之间的主要区别是什么?
2023-08-21 10:14:153419 
在许多领域都需要各种电机,包括知名的步进电机和伺服电机。但是,对于许多用户而言,他们不了解这两种电机的主要区别,因此他们始终不知道如何选择。那么,步进电机和伺服电机之间的主要区别是什么?基本结构
2023-08-22 08:08:477427 介绍了舵机的优点、舵机的类型与结构,与伺服电机、步进电机做一个对比
2023-09-19 16:21:283997 
电子发烧友网站提供《如何正确选择伺服电机和步进电机.doc》资料免费下载
2023-10-27 11:03:533 伺服电机和步进电机在控制精度、低频特性、矩频特性、过载能力、编码器类型等方面存在显著差异。 控制精度:步进电机通过控制脉冲的数量和频率来控制转动角度和速度,具有较好的位置控制性能。而伺服电机通过
2024-02-02 17:13:081871 伺服电机和步进电机在控制精度、低频特性、矩频特性、过载能力、编码器类型等方面存在显著差异。
2024-01-16 10:27:422932 步进电机和交流伺服电机各有其优点和缺点 1.步进电机具有较高的定位精度; 2.步进电机易于维护; 3.步进电机过载能力较弱; 4.步进电机
2024-02-21 10:31:011211 首先,从控制精度来看,步进电机的精度主要依赖于其步距角,步距角越小,精度越高。
而伺服电机的控制精度则由电机轴后端的旋转编码器保证,编码器的刻度越多,精度就越高。
2024-03-15 11:18:251643 步进伺服电机出现失步现象,在工作中,这可真麻烦的事情。有没有想过,为什么好好的步进伺服电机会出现失步呢?让我们一起来了解一下。 首先,让我们了解一下什么是步进伺服电机。步进伺服电机是一种特殊的电机
2024-03-19 08:44:182209 
步进电机和伺服电机都是现代工业自动化领域中不可或缺的驱动元件,它们在许多方面都有显著的区别和差异。本文将从控制方式、低频特性、矩频特性、过载能力、运行性能、速度响应性能、精度、应用场景等多个维度,对步进电机和伺服电机进行深入的比较和分析,以期为读者提供全面的认识和理解。
2024-05-24 14:59:413930 在自动化控制的世界中,伺服电机和步进电机是实现精准动力传输的两个关键角色。虽然它们的终极目标相同,即精确控制机械运动,但它们的工作原理和最佳应用场景却有所不同。本文将带你了解伺服电机
2024-06-17 16:21:542476 
步进电机伺服控制系统是一种精密的电机控制系统,它通过精确控制电机的步进角度来实现对机械运动的精确控制。这种系统广泛应用于自动化设备、机器人、精密仪器等领域。 步进电机伺服控制系统的作用 步进电机伺服
2024-09-04 09:46:121709 在现代工业自动化和精密控制领域,电机的选择对于系统的性能至关重要。伺服电机和步进电机是两种常用的电机类型,它们各自具有独特的优势和局限性。 1. 工作原理 伺服电机和步进电机的工作原理是它们最根本
2024-10-22 11:07:572301 在自动化和精密控制领域,电机的选择至关重要。伺服系统和步进电机是两种常见的电机类型,它们各自具有独特的优势和局限性。 伺服系统与步进电机的基本区别 1. 控制原理 伺服系统 :伺服系统是一种闭环控制
2024-12-10 10:13:291674 大家在运动控制的时候是用伺服电机的还是用步进电机做定位控制了?为什么有时候用伺服电机,有时候又步进电机?这是什么原因呢?本期我们就一起来探讨一下步进电机和伺服电机的区别!
2025-10-15 14:32:511498 
,不同的项目选择的驱动电机也不同。那么使用步进电机和伺服电机有着怎样的区别? 1、控制精度不同,这两个电机的控制精度有一定的差距,这在电机选择中非常重要。伺服电机
2023-03-09 16:06:23
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论