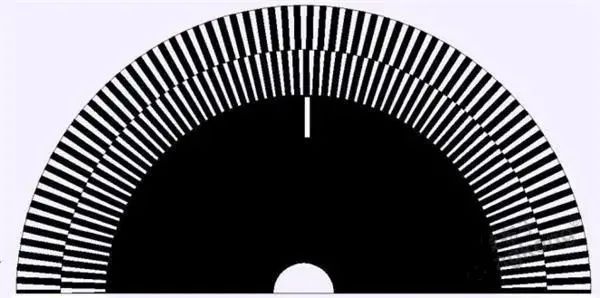
是工业中常用的电机定位设备,可以精确的测试电机的角位移和旋转位置。 二、编码器分类 按照工作原理编码器可分为增量式和绝对式两类。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲
2016-06-27 16:43:31
1.编码器简介编码器分类: 按工作原理:光电式、磁电式和触点电刷式 按码盘的刻孔方式:增量式和绝对式两类 由于博主接触面还不是很广,一共就用过两个种类的编码器,都是属于光电的差分编码器:一般由8根线
2021-08-19 08:28:28
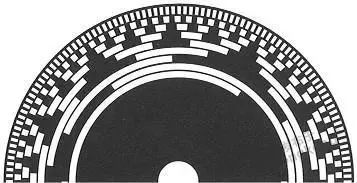
,那么输出00 0000 0001, 如果偏离50°,也就是在50°的位置, 那么输出就是00 0101 0000。绝对式编码器总是输出当前位置信息。编码器工作原理 #1 光电编码器,是一种通过光电转换将
2012-02-24 22:03:25
编码器工作原理、作用及其分类简介
2012-08-20 12:51:57
伺服电机的作用是什么?有哪些分类?编码器具有哪些特点?工作原理是什么?
2021-09-29 08:33:51
编码器是什么?编码器工作原理是什么?
2021-10-19 09:59:08
编码器是如何进行分类的?分为哪几类?绝对值编码器常见故障有哪些?绝对值编码器与绝对式编码器有什么不同?
2021-07-12 06:41:29
编码器有哪些分类?
2022-01-21 07:18:52
文章目录编码器是什么编码器的分类工作原理编码器是什么编码器(encoder)是将信号 如比特流或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者
2021-09-14 09:16:03
最近公司项目用到了编码器选用的编码器 为360脉冲为了方便其一圈发360个脉冲 ,当然精度只有一度 ,如果为了高精度可以选用其他类型的首先简述一下编码器的工作原理编码器可按以下方式来分类。1、按码盘
2021-07-12 06:39:50
编码器的工作原理是什么?如何通过波形得出正反转的判据呢?编码器的程序结构如何实现?
2021-10-14 06:36:49
伺服电机的种类有哪些?伺服电机主要的作用是什么?编码器的结构域工作原理是什么?编码器的分类和特点有哪些?伺服电机与编码器的工作是什么?
2021-06-28 08:11:44
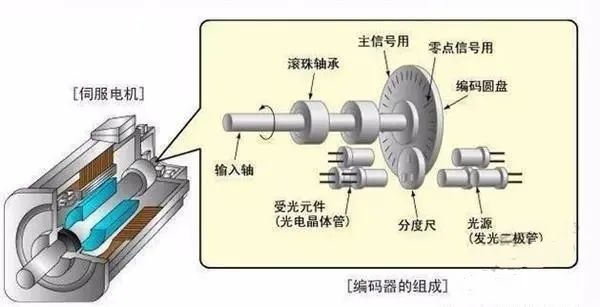
)、检测光栅(Mask)、光电转换电路(包括光源、光敏器件、信号转换电路)、机械部件等组成。02.编码器的分类对于编码器的分类,可以用下图一的结构来表示:图一:编码器的分类上图一所示的分类只是其中
2021-05-17 13:20:52
为什么要用电机驱动?TB6612电机驱动怎么实现?为什么要用电机编码器?电机编码器怎么使用?
2021-10-20 07:36:53
助于它用于步进/伺服电机控制、导航菜单序列和增加/减少数字的值等等。在本篇文章中,我们将了解不同类型的旋转编码器及其工作原理。我们还将它连接到PIC单片机PIC16F877A,并通过旋转编码器控制整数值...
2021-11-24 06:23:41
环节,伺服系统还有很多细节控制,如扭力,过扭力。4.分为直流和交流伺服电机两大类。5.编码器的结构域工作原理1.透射式旋转光电编码器2.编码器的分辨率3.编码器的分类和特点:按照工作原理 可以分为增量式和绝对式
2018-10-25 10:07:08
编码器可以分为哪几类?怎样去读取编码器的位置值?伺服电机与编码器是怎样工作的?
2021-09-26 08:43:27
什么是编码器?编码器的工作原理是什么?单片机是如何通过编码器的输出得到电机的旋转方向和速率的?
2021-11-11 07:20:44
增量式编码器工作原理是什么?增量式编码器的结构是由哪些部分组成的?光电旋转编码器使用方法是什么?单片机读取光栅编码器角度的方法是什么?
2021-06-30 07:29:18
旋转编码器的引脚CLK(A相)DATA(B相)SWITCHVCCGND工作原理旋转编码器的工作原理以及如何在Arduino中使用 https://www.yiboard.com
2022-01-12 07:31:12
准确解析编码器的数字输出。本文将介绍旋转编码器的作用及其工作原理。然后说明如何解释其信号,最后再介绍几个编码器解决方案及其实际应用。
2021-02-22 06:09:31
, 但它输出一系列脉冲, 这使得它的应用独特。当编码器的旋钮旋转时, 它以小步的形式旋转, 这有助于它用于 stepper/servo 电机控制。在本文中,我们将了解不同类型的旋转编码器及其工作原理。我...
2021-07-16 08:17:28
何谓伺服系统?旋转变压器是什么?光电编码器的主要工作原理是什么?光电编码器与旋转变压器的优缺点分别是什么?
2021-06-28 07:05:39
带编码器的步进电机,电机在工作的情况下有时会出现电机自身的步数和编码器测得的步数不一致的情况!以编码器测得的步数和电机自身的步数对比,调整电机步数,有时会出现调整后的电机位置与预设位置不符现象,(步进电机步数准确,编码器不准确?)问下有什么办法解决没?
2018-05-09 22:37:31
永磁交流伺服电机的工作原理是什么?更换新编码器后的常规零位校正方法是什么?永磁交流伺服电机的编码器相位为何要与转子磁极相位对齐?
2021-09-27 08:06:54
脉冲编码器的工作原理脉冲编码器是一种光学式位置检测元件,编码盘直接装在电机的旋转轴上,以测出轴的旋转角度位置和速度变化,其输出信号为电脉冲。是一种常用的角位移传感器。同时也可作速度检测装置。脉冲
2021-07-12 08:36:38
什么是光电编码器?
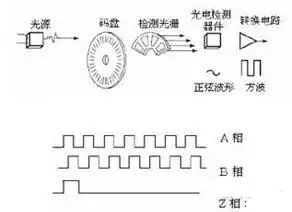
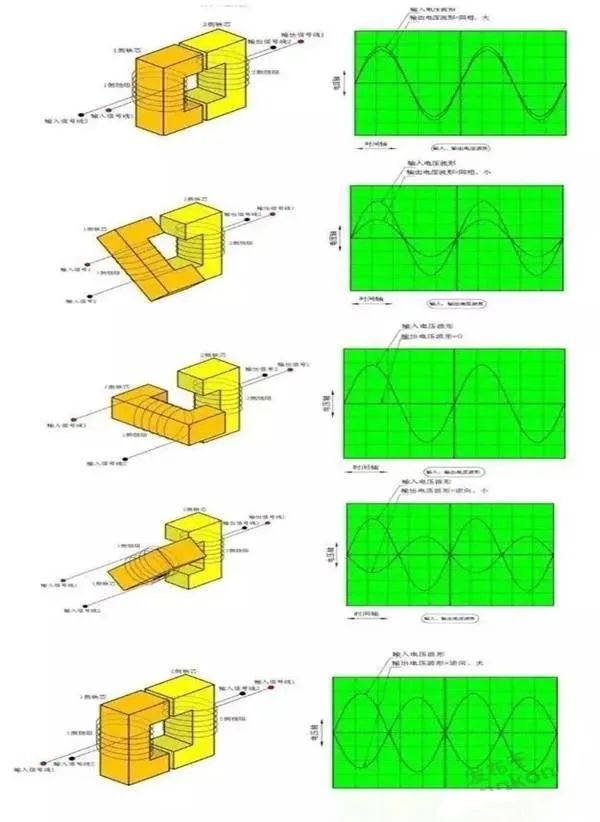
工作原理:当光电编码器的轴转动时A、B两根线都产生脉冲输出,A、B
2008-04-06 15:04:53 5050
5050 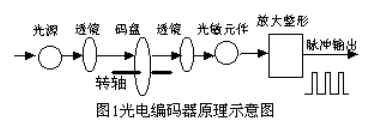
光电编码器的工作原理
工作原理:当光电编码器的轴转动时A、B两根线都产生脉冲输出,A、B两相脉冲相差90度相
2009-01-05 08:59:263259 
光电编码器简介、分类及应用
一、光电编码器简介
2010-01-11 08:40:455985 光电编码器,光电编码器的工作原理
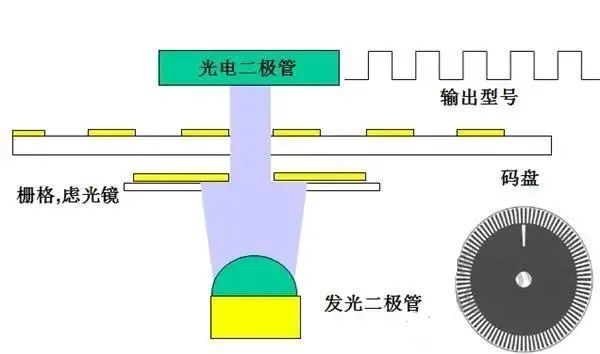
光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最
2010-03-02 14:40:059458 编码器工作原理,光电编码器的工作原理分析
编码器工作原理 绝对脉冲编码器:APC 增量脉冲
2010-03-08 15:18:00219911 光电编码器的工作原理和应用电路
1 光电编码器的工作原理
光电编码器(Optical Encoder)俗称“单键飞梭”,其外观好像一个电位器,
2010-03-08 15:29:2310980 编码器工作原理和选型方法
绝对脉冲编码器:APC
增量脉冲编码器:SPC
两者一般都应用于速度控制或位置控制系统的检测元件.
旋转编码器是用
2010-04-21 17:42:441842 编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。 编码器工作原理 由一个中心有轴的光电码盘,其上有环形通、暗的刻线,
2012-07-09 10:40:513728 的测试电机的角位移和旋转位置。 图 1 编码器 二、编码器分类 按照工作原理编码器可分为增量式和绝对式两类。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式
2017-09-30 17:04:44 25
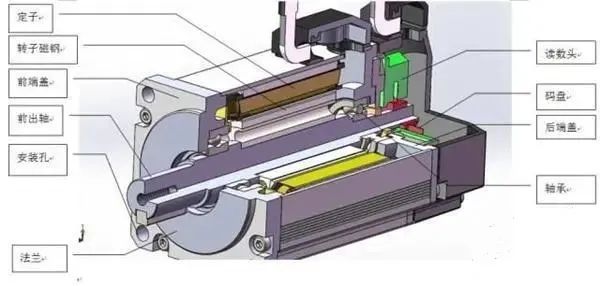
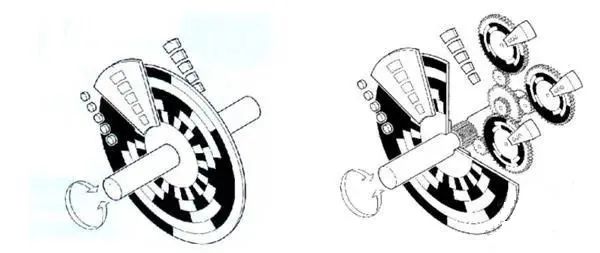
25 伺服电机编码器是安装在伺服电机上用来测量磁极位置和伺服电机转角及转速的一种传感器,从物理介质的不同来分,伺服电机编码器可以分为光电编码器和磁电编码器,另外旋转变压器也算一种特殊的伺服编码器,市场上使用的基本上是光电编码器,不过磁电编码器作为后起之秀,有可靠,价格便宜,抗污染等特点,有赶超光电编码器的趋势。
2017-11-10 16:47:37137086 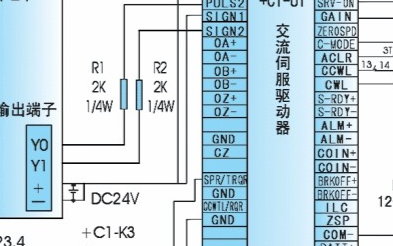
伺服电机编码器是安装在伺服电机上用来测量磁极位置和伺服电机转角及转速的一种传感器,从物理介质的不同来分,伺服电机编码器可以分为光电编码器和磁电编码器,另外旋转变压器也算一种特殊的伺服编码器,市场上使用的基本上是光电编码器,不过磁电编码器作为后起之秀,有可靠,价格便宜,抗污染等特点,有赶超光电编码器的趋势。
2018-02-03 11:34:5563614 本文主要介绍了编码器元件工作原理及其应用电路。本文将对增量型编码器和绝对型编码器的工作原理和应用进行介绍。在编码器的本体(脉冲码盘)中预先根据不同的产品要求,制作金属导通区与塑胶绝缘区,导通区与绝缘区的角度、形状大小,决定着产品最终的信号输出形式。
2018-03-04 15:20:0441293 
本文开始介绍了步进电机工作原理,其次介绍了三款步进电机电路图,最后介绍了步进电机是否有编码器以及步进电机加编码器的方法和重要意义。
2018-04-25 12:48:4154789 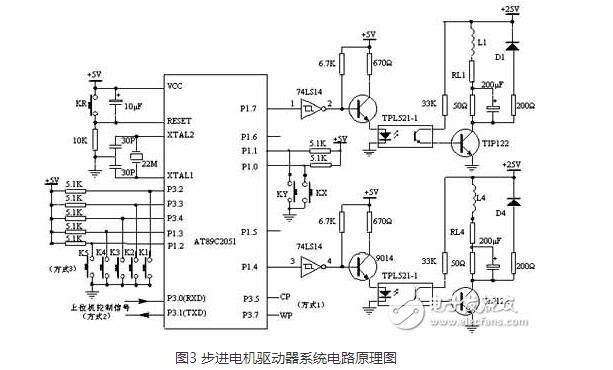
正交编码器(又名双通道增量式编码器),用于将线性移位转换为脉冲信号。
2018-08-02 08:50:4533596 光电编码器主要有增量式编码器、绝对式编码器、混合式绝对值编码器、旋转变压器、正余弦伺服电机编码器等,其中增量式编码器、绝对式编码器、混合式绝对值编码器属于数字量编码器,旋转变压器、正余弦伺服电机编码器属于模拟量编码器。
2018-10-21 10:32:2916823 脉冲编码器是一种光学式位置检测元件,编码盘直接装在电机的旋转轴上,以测出轴的旋转角度位置和速度变化,其输出信号为电脉冲。
2018-11-28 09:23:2614263 编码器的工作原理及作用:它是一种将旋转位移转换成一串数字脉冲信号的旋转式传感器,这些脉冲能用来控制角位移,如果编码器与齿轮条或螺旋丝杠结合在一起,也可用于测量直线位移。
2019-02-05 08:50:0012311 在伺服电机的内部零件中有一个是用来测量磁极位置和伺服电机转角及转速的一种传感器叫伺服电机编码器,根据物理介质的不同来分,伺服电机编码器可以分为光电编码器和磁电编码器,另外旋转变压器也算一种特殊的伺服
2019-11-06 11:34:3413339 本文主要阐述了主轴编码器工作原理及应用。
2019-11-07 09:06:1813828 伺服电机编码器是安装在伺服电机上用来测量磁极位置和伺服电机转角及转速的一种传感器,从物理介质的不同来分,伺服电机编码器可以分为光电编码器和磁电编码器,另外旋转变压器也算一种特殊的伺服编码器,市场上使用的基本上是光电编码器,不过磁电编码器作为后起之秀,有可靠,价格便宜,抗污染等特点,有赶超光电编码器的趋势。
2019-11-07 09:18:5311261 绝对编码器这是能将电动机一转内的角度数据输出到外部目标的检测器。绝对编码器一般能够以8到12位输出360 °绝对值编码器与增量编码器工作原理非常相似。
2019-12-04 11:06:1831425 本文主要阐述了磁电机结构分类及工作原理。
2020-01-13 09:04:2310660 随着拉线位移传感器的应用越来越普遍,对于拉线编码器的了解也越来越重要了,因为如果您不懂拉绳编码器的工作原理的话,您也不好真正的把拉线式编码器应用到产品上或者设备上。 那么拉绳位移传感器的工作原理
2020-06-30 11:36:269361 随着拉线位移传感器的应用越来越普遍,对于拉线编码器的了解也越来越重要了,因为如果您不懂拉绳编码器的工作原理的话,您也不好真正的把拉线式编码器应用到产品上或者设备上。 那么拉绳位移传感器的工作原理
2020-05-12 17:10:138606 电机编码器配置种类繁多,例如增量式或绝对式,光学或磁性,带轴或轮毂/空心轴等。所使用的电机编码器的类型取决于许多因素,尤其是电机类型,需要闭环反馈的应用以及所需的安装配置。
2022-10-11 14:44:145226 编码器的工作原理及作用:它是一种将旋转位移转换成一串数字脉冲信号的旋转式传感器,这些脉冲能用来控制角位移,如果编码器与齿轮条或螺旋丝杠结合在一起,也可用于测量直线位移。
2023-01-04 09:07:1111106 伺服电机编码器是安装在伺服电机上用来测量磁极位置和伺服电机转角及转速的一种传感器,从物理介质的不同来分,伺服电机编码器可以分为光电编码器和磁电编码器,另外旋转变压器也算一种特殊的伺服编码器,市场上使用的基本上是光电编码器,不过磁电编码器作为后起之秀,有可靠,价格便宜,抗污染等特点,有赶超光电编码器的趋势。
2023-02-24 11:56:383645 伺服电机编码器是安装在伺服电机上用来测量磁极位置和伺服电机转角及转速的一种传感器,从物理介质的不同来分,伺服电机编码器可以分为光电编码器和磁电编码器,另外旋转变压器也算一种特殊的伺服编码器,市场上使用的基本上是光电编码器,不过磁电编码器作为后起之秀,有可靠,价格便宜,抗污染等特点,有赶超光电编码器的趋势。
2023-02-27 17:50:212952 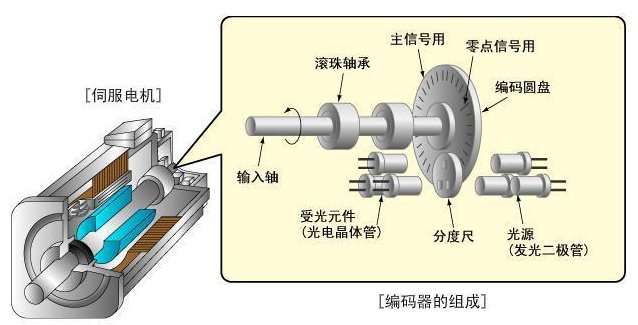
文章目录 1.L298N电机驱动 1.1 产品参数 1.2 实物图和接线 2.编码器 2.1 编码器简介 2.2 常用编码器分类 2.3 霍尔编码器实物图接线!!!! 2.4 编码器倍频原理 3.
2023-03-17 15:42:019 伺服电机编码器是安装在伺服电机上用来测量磁极位置和伺服电机转角及转速的一种传感器,从物理介质的不同来分,伺服电机编码器可以分为光电编码器和磁电编码器,另外旋转变压器也算一种特殊的伺服编码器,市场上使用的基本上是光电编码器,不过磁电编码器作为后起之秀,有可靠,价格便宜,抗污染等特点,有赶超光电编码器的趋势。
2023-03-20 09:12:432486 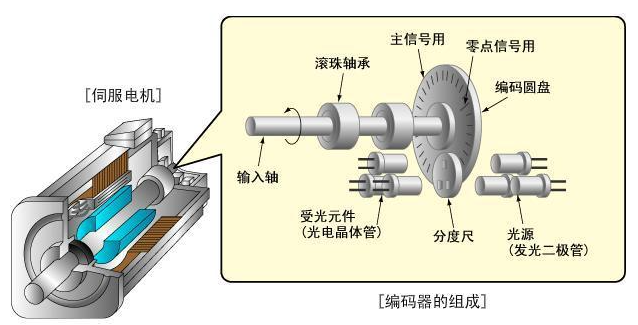
编码器是什么?编码器有哪些分类及应用;编码器是什么?在数字信号处理和通信系统中,编码器是一种重要的设备,用于将原始数据转换为字符序列或二进制码序列。编码器是一种可以同时测量物体位置和方向的蒿精度
2023-05-18 11:08:477072 
旋转编码器是什么?浅读旋转编码器工作原理与特点及应用:旋转编码器是一种常见的传感器,它能够通过检测旋转轴的转动实现实时位置监测与控制。它具有高精度、长寿命、可重复性高、体积小等特点,因此在机器人控制、自动化生产、医疗设备、轮廓检测等方面被广泛应用。
2023-05-29 09:21:154773 
伺服电机编码器 伺服电机编码器是安装在伺服电机上用来测量磁极位置和伺服电机转角及转速的一种传感器,从物理介质的不同来分,伺服电机编码器可以分为光电编码器和磁电编码器,另外旋转变压器也算一种特殊的伺服
2023-06-26 14:01:012267 磁性直线编码器是一种常用于精确测量直线位移的关键装置。本文将详细介绍磁性直线编码器的工作原理,包括其基本结构、工作原理、测量原理和应用领域。同时,还会探讨磁性直线编码器的优势和限制,并对其未来发展进行展望。
2023-06-26 14:04:542467 伺服电机编码器是安装在伺服电机上用来测量磁极位置和伺服电机转角及转速的一种传感器,从物理介质的不同来分,伺服电机编码器可以分为光电编码器和磁电编码器,另外旋转变压器也算一种特殊的伺服编码器,市场上
2023-08-25 08:09:034366 
伺服编码器这个基本的功能与普通编码器是一样的,比如增量型的有A,A反,B,B反,Z,Z反等信号,除此之外,伺服编码器还有着跟普通编码器不同的地方,那就是伺服电机多数为同步电机,同步电机启动的时候需要
2023-09-22 14:19:582370 伺服电机编码器原理 伺服编码器这个基本的功能与普通编码器是一样的,比如增量型的有A,A反,B,B反,Z,Z反等信号,除此之外,伺服编码器还有着跟普通编码器不同的地方,那就是伺服电机多数为同步电机
2023-09-25 14:07:173731 SSI编码器的工作原理: 1、SSI编码器根据光电元件检测转盘上的刻度线,把它转换为数字信号。这种数字信号通过信号处理电路后输出给自动控制系统,从而实现对物体位置的精确测量。2、与其他类型的编码器
2023-10-13 11:24:196201 
磁性编码器的工作原理 磁性编码器是一种常见的测量装置,用于测量物体的位置和运动。它可以通过检测磁性材料的变化来进行精确的测量。本文将详细介绍磁性编码器的工作原理。 磁性编码器主要由两部分组成:磁性
2023-12-18 14:36:552354 磁性编码器是一种常见的测量装置,用于测量物体的位置和运动。它可以通过检测磁性材料的变化来进行精确的测量。本文将详细介绍磁性编码器的工作原理。
2024-01-15 09:53:335560 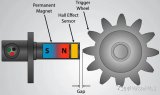
北极极化,主要取决于应用程序需要什么样的输出信号。磁性编码器的工作原理:当标尺旋转或移动时,它会通过读头。因为读头内部有一组传感器,这种传感器可以检测到每个磁条通过
2024-01-22 11:24:402748 
零对位方法。 伺服电机编码器的故障原因: (1) 机械撞击:长时间运行中,如果电机发生撞击或外力作用,可能导致编码器的机械部件损坏。 (2) 环境因素:工作环境的温度、湿度、腐蚀性气体等因素也可能导致编码器部件老化、腐
2024-02-14 18:06:0030699 高清视频编码器是一种数字视频压缩工具,它能够将高清视频信号编码成数字信号,并将其压缩到较小的文件大小,以便更高效的存储和传输。以下是高清视频编码器的工作原理与优势的解析: 工作原理: 预处理 :高清
2024-02-20 15:14:401720 按照工作原理编码器可分为增量式和绝对式两类 增量式编码器 1、增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。
2024-03-19 11:25:473187 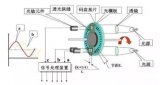
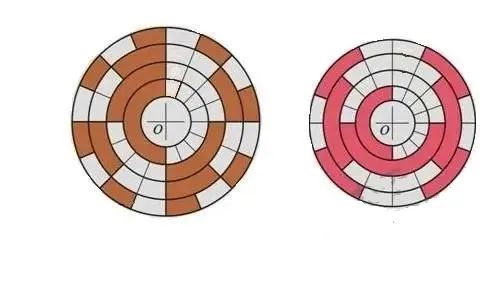
绝对式编码器的工作原理:绝对式编码器是一种能够输出特定编码来表示机械位置的传感器。它通过检测旋转轴的旋转角度,并将其转换为电信号输出。每个位置都对应一个唯一的编码,促使机器人能够准确知道其当前的位置,即使在停止运动后也能够精确指示位置。
2024-04-01 15:10:112334 
绝对值编码器是一种常用的位置反馈传感器,广泛应用于各种电机控制系统。绝对值编码器还可用于检测电机的转速和方向。
2024-05-21 11:08:537918 绝对值编码器在电机控制系统中的应用
在电机控制系统中,绝对值编码器带来了精确的位置反馈信号。依据编码器的输出脉冲信号,电机控制器能够计算出电动机的实时转速和位置,以此来实现精确的位置控制。除此之外
2024-05-21 10:55:362696 
在工业自动化控制系统中,变频器和编码器是两种重要的设备,它们在电机控制、速度调节和位置反馈等方面发挥着关键作用。然而,尽管它们都在电机系统中有着广泛的应用,但变频器与编码器在功能、结构、工作原理和应用场合等方面存在显著的差异。本文将从多个角度详细阐述变频器和编码器的区别。
2024-05-29 15:35:523781 旋转式编码器,作为现代工业自动化系统中不可或缺的一部分,其工作原理和特点对于理解其应用及优化系统性能具有重要意义。本文将详细阐述旋转式编码器的工作原理,并深入探讨其特点,旨在为读者提供全面、深入的了解。
2024-05-29 16:01:162655 增量式编码器的工作原理:增量式编码器的核心部分是码盘,它通过旋转来产生脉冲信号。码盘上有一系列的条纹,这些条纹会依据旋转的方向,根据光电传感器产生脉冲信号。这些脉冲信号经过放大和整形后,可以输出给控制系统使用。
2024-06-04 10:15:014509 
。本文将详细介绍伺服电机后面的编码器的作用、工作原理、分类以及在伺服系统中的应用。 一、编码器的作用 编码器是一种将机械位置或角度转换为电信号的传感器。在伺服电机系统中,编码器的主要作用如下: 位置检测:编码器
2024-06-05 14:53:584022 伺服电机编码器调零是确保电机精确控制的重要步骤。本文将详细介绍伺服电机编码器调零的原理、步骤和注意事项,以帮助用户更好地理解和操作。 伺服电机编码器调零的原理 伺服电机编码器是一种将电机轴的旋转
2024-06-05 15:41:498662 伺服电机编码器是伺服系统中的重要组成部分,其性能的好坏直接影响到伺服系统的精度和稳定性。本文将详细介绍伺服电机编码器的工作原理、性能指标、故障诊断方法以及维护保养措施,帮助用户更好地判断伺服电机
2024-06-17 11:02:303571 伺服电机编码器是伺服电机的重要组成部分,它能够将电机的旋转角度、速度等信息转换为电信号,为控制系统提供精确的位置和速度反馈。 一、伺服电机编码器的分类 1.1 增量式编码器 增量式编码器是一种常见
2024-06-17 11:07:324919 全球知名的电机制造商,其伺服电机和编码器产品具有高性能、高可靠性的特点。本文将详细介绍三菱伺服电机编码器的接线方法。 编码器的类型 编码器按照工作原理可以分为增量式编码器和绝对式编码器两种。增量式编码器通过检
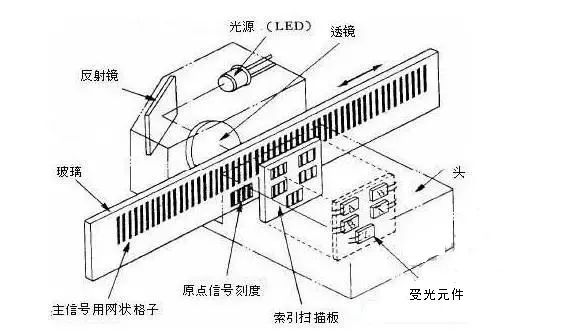
2024-06-17 14:11:535849 ,编码器在使用过程中可能会出现各种故障,影响伺服电机的正常运行。 编码器的工作原理 编码器是一种将机械位置信号转换为电信号的装置,其工作原理如下: 编码器内部有一个光栅盘,上面有等间距的透光和不透光的条纹。 光栅盘
2024-06-17 14:22:452648 伺服电机编码器分很多种,有直接转速型编码器、有位置分辨率型编码器、有高精度位姿编码输出和高灵敏度位移测量等类型。下面我们来了解一下伺服电机编码器如何分类: 一、直接转速型编码器 这种类型的编码器
2024-07-21 17:01:133372 编码器是一种将机械位置或运动转换为电信号的设备,广泛应用于自动化控制、机器人技术、航空航天等领域。 编码器的工作原理 编码器的核心功能是将旋转或直线运动转换为数字信号。这一过程通常涉及以下几个步骤
2024-09-20 11:45:279306 的传感器。在工业自动化、机器人、航空航天等领域,编码器发挥着至关重要的作用。根据工作原理的不同,编码器可以分为磁电编码器和光电编码器两大类。本文将详细介绍这两种编码器的区别,包括它们的工作原理、结构、性能和应用领域。
2024-10-12 09:54:094362 电机系统中起着至关重要的作用,是实现高效、稳定和精确控制的核心组件。编码器的作用是什么呢?它的工作原理又是怎样的?其利天下·伺服电机驱动方案编码器的作用位置反馈:
2024-11-02 10:38:191712 
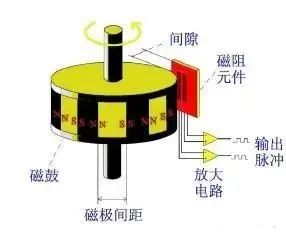
磁编码器工作原理解析 磁编码器是一种利用磁场变化来测量角度和位置的传感器。它的工作原理基于霍尔效应或磁阻效应。以下是磁编码器的基本工作原理: 磁场产生 :磁编码器内部有一个或多个永磁体,这些磁体产生
2024-11-23 09:06:164887 编码器的工作原理 编码器可以是硬件设备,也可以是软件程序,它们的基本功能是将输入信号转换成特定的输出格式。编码器的工作原理取决于其类型和应用领域。以下是一些常见的编码器类型及其工作原理: 数字信号
2024-11-24 10:11:203870 在现代工业与自动化控制领域,精确的位置反馈是确保设备稳定运行和高效生产的关键。拉线编码器,作为一种独特的位移测量装置,凭借其高精度、长寿命和易于安装的特点,在众多应用场景中脱颖而出。本文将深入探讨拉线编码器的精密结构及其工作原理,带您领略这一技术背后的智慧与创新。
2024-12-25 14:01:171477 伺服电机编码器故障及维修,伺服电机编码器4大常见故障,编码器信号丢失或不稳定,编码器零点偏移,编码器过热,编码器机械损坏;伺服电机编码器4大维修方法:在维修伺服电机编码器时,需要维修人员具备一定
2025-01-21 14:49:354310 
工作环境、精度要求、分辨率需求、输出信号类型等。这有助于缩小选型范围,提高选型的准确性和效率。 二、选择合适的编码器类型 根据应用需求,选择合适的编码器类型。常见的伺服电机编码器类型包括光电编码器、磁性编码器和共
2025-03-11 12:01:041709 
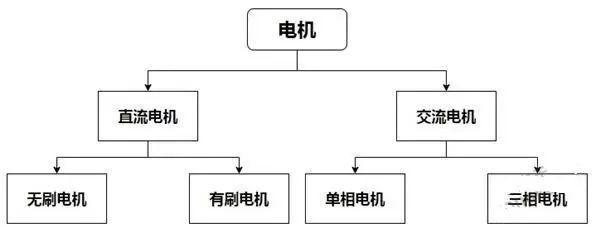
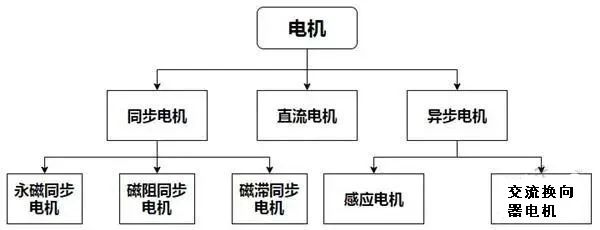
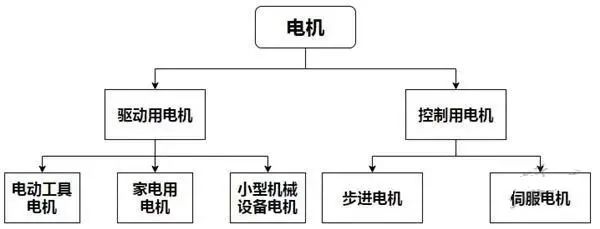
工业电机中,有些电机自带编码器,而有些则不带。编码器通常用于提供电机的位置、速度或方向等反馈信息,以实现更精确的控制。以下是对电机及其编码器的分类和特点的详细分析: 一、电机分类 电机可以根据
2025-03-16 11:09:191561 磁性编码器工作原理特点结构,磁性编码器利用磁场感应原理进行测量,通常由磁性标尺和读头组成。磁性标尺上有一系列的磁极,当标尺旋转或移动时,读头中的霍尔效应传感器或磁阻传感器会检测到磁场的变化,并将其转换为电信号,这些电信号经过放大、滤波、解码等处理后,输出给外部的控制系统。
2025-03-24 13:17:311264 
增量式编码器工作原理是什么?增量式编码器是一种通过输出脉冲信号来反映旋转位置变化的传感器,广泛应用于电机测速、位置控制等领域。其工作原理可从机械结构、信号产生、信号处理三个层面展开,增量式编码器
2025-09-29 11:00:471884 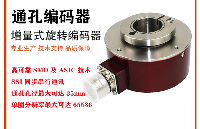
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论