激光雷达系统的视场 (FOV) 决定了激光雷达能够捕捉到的图像的宽度,因此该视场对于自动驾驶决策算法十分重要。
2022-03-07 14:21:35 3123
3123 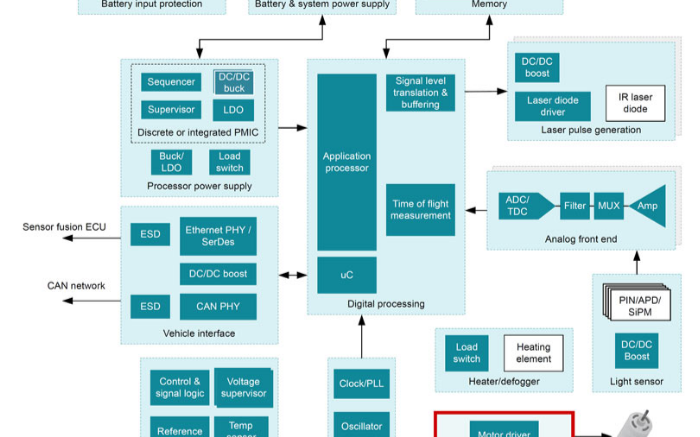
据麦姆斯咨询报道,高分辨率激光雷达传感器领先供应商Ouster近日在2020年国际消费电子展(CES 2020)上推出了两款高分辨率数字激光雷达传感器超宽视场角的OS0-128以及远程OS2-128
2020-01-29 11:23:543915 电子发烧友网报道(文/周凯扬)在激光雷达市场,除了冲击车规、低成本和快速量产外,追求更大的视场角、分辨率和探测距离也是比较常见的竞争方向。靠机械结构与电机旋转的机械激光雷达无疑视场角最广、精度最高
2023-02-03 02:08:003961 开始慢慢被提上日程。 角分辨率 在一众固态激光雷达厂商追求更大视场角的过程中,往往不能忽视了角分辨率这一重要精度参数。随着如今激光雷达的扫描方式已经变得多种多样,也出现了数字激光雷达等产物,但在考虑角分辨率时,
2023-05-07 09:30:474147 
电子发烧友网综合报道 激光雷达作为获取三维空间信息的核心传感器,是自动驾驶、智能机器人和地理测绘等领域的关键技术。然而,传统方案始终面临一个根本性矛盾:机械扫描式LiDAR精度高、探测距离远,但效率
2025-09-16 10:32:001473 
供电。目前市面上所有多线激光雷达都是电滑环,寿命几千小时。即使360°雷达用了光磁技术,相比270°雷达,因负载重、质心没有后者稳定,也会导致电机寿命短于后者。还有激光器的寿命,三角相位激光器连续寿命
2018-11-09 19:49:16
`我们已经对单线激光雷达司空见惯,其旋转线扫的测量方式导致造成寿命问题和价格居高不下。 因此,北醒研发了CE30,它是一款具有大视场角的固态激光雷达。它可同时输出132°水平视场、9度垂直视场范围内
2018-01-11 09:21:13
想了解行业国内做固态激光雷达的厂家,激光雷达里面是怎么样的啊
2021-01-17 15:29:39
;通用则更为夸张,不仅收购了能够提供无人驾驶解决方案的Cruise,还收购了激光雷达制造公司Strobe,同时自己还有了自动驾驶运营平台,实现了软件(技术)+硬件+平台的全方位涉及;福特和百度也共同
2017-10-20 15:49:06
激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显:1、具有极高的分辨率:激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,激光雷达具有极高的距离
2017-09-19 15:51:15
的分辨率和灵敏度,探测精度高,并且能够全天候工作,不受白天和黑夜的光照条件的限制。但高昂但成本限制了激光雷达的普及,早前谷歌无人车使用的激光雷达以其超过75000万美元令人瞠目结舌,而自动驾驶头部公司W
2021-03-18 11:14:17
有应用视觉和激光雷达,这两者并没有冲突。激光雷达不依赖光照,它的视角是 360 度,计算量比较小,可以实时扫描,目前普遍用的是 100 毫秒以内的。激光雷达在扫描的过程中,先识别障碍物,知道这个障碍物在
2017-09-08 17:24:48
激光雷达可以高精度、高准确度地获取目标的距离、速度等信息或者实现目标成像。激光通过扫描器单元形成光束角度偏转,光束与目标作用形成反射/散射的回波。当接收端工作时,可产生原路返回的回波信号光子到达
2021-09-13 06:30:11
激光雷达都会直接以测量距离作为其主要指标。不过除了测距范围外,相信你也了解下面这些指标数据: 较高的扫描频率可以确保安装激光雷达的机器人实现较快速度的运动,并且保证地图构建的质量。 但要提高扫描频率
2018-02-07 13:40:27
传统机械激光雷达无法实现的。MEMS整套系统只需一个很小的反射镜就能引导固定的激光束射向不同方向。由于反射镜很小,因此其惯性力矩并不大,可以快速移动,速度快到可以在不到一秒时间里跟踪到 2D 扫描模式
2020-07-14 07:56:45
可能没有这一块,但硬件上很重要,就像波音的飞机,除去研发,制作成本就很高。激光雷达属于高精密机械,产品制作不容易。无人驾驶汽车所用的64线雷达价格昂贵,但8线则便宜很多,这是技术路线选择的问题。”2
2017-10-16 16:31:32
运用红外激光设备把红外线投影到屏幕上。当屏幕被阻挡时,红外线便会反射,而屏幕下的摄影机则会捕捉反射去向,再经系统分析,便可作出反应。 激光雷达应用之 3D建模与环境扫描RPLIDAR 3D扫描图那么
2018-05-11 15:33:44
的。Scanse的一款价值250美元的名为“sweep”的二维激光雷达扫描器可在户外使用,并专为移动、低功耗应用而设计。它只用了竞争对手近四分之一的成本,这将给这类传感器带来全新的应用(我们在很多其他类型
2017-09-26 14:30:16
传感器的SLAM地图构建 激光雷达可以在探测范围内进行360°二维或三维扫描,产生数据信息。SLAM可根据激光雷达提供的数据信息构建周边环境地图并计算自身所在的位置。激光雷达比其他传感器的优势在于能
2018-11-09 15:59:01
有道友能介绍介绍EAI激光雷达吗?
2020-12-31 17:48:20
FMCW激光雷达与dTOF激光雷达的区别在哪?
2021-07-23 13:22:37
大神出来聊聊: RPLIDAR A2 360°激光雷达,能不能输出数据到arduino上?或者说arduino能跟得上吗?
2020-08-14 08:02:55
有限公司、深圳市速腾聚创科技有限公司等单位。本文件规定了车载激光雷达的术语和定义、车载激光雷达的型式、性能测试和检验规则。 本文件适用于安装在道路机动车的用于环境三维重建、障碍物探测、定位的机械扫描
2022-03-10 11:21:36
TOF 方案激光雷达是激光雷达新一代技术方案,本产品解决了如市场三角测试法等产品组装问题难,价格成本高等问题,目前提供面阵及单光子技术,基于COM产品。集成了SPAD,TDC,DSP,RAM
2019-06-07 00:03:35
。大部分激光雷达都会直接以测量距离作为其主要指标。不过除了测距范围外,相信你也了解下面这些指标数据: 较高的扫描频率可以确保安装激光雷达的机器人实现较快速度的运动,并且保证地图构建的质量。 但要提高扫描频率
2018-02-02 14:06:27
系统:MEMS渐成主力,Flash/OPA纯固态方案值得期待
2.3.1 机械式激光雷达
机械式激光雷达通过电机带动收发阵列进行整体旋转,实现对空间水平360°视场范围的扫描。测距能力在水平360
2023-09-19 13:35:01
。然而,这种方法由于成本低、可实现度高而受到人们的关注。 滨松MEMS Mirror产品 光学相控阵列(OPA)技术,是第三种参与竞争的激光雷达技术,它以可靠的“固定部件”设计而日益流行。它由相干光
2018-09-10 14:10:45
``一年一度的国际消费类电子产品展览会(CES)已经完满收官,短短的几天时间里,我们见识了Intel无人飞机灯光秀、百度无人车、移动行李箱等众多“黑科技”。而北醒不仅展示了性能卓越的固态激光雷达,在
2018-01-25 09:38:47
`一年一度的国际消费类电子产品展览会(CES)已经完满收官,短短的几天时间里,我们见识了Intel无人飞机灯光秀、百度无人车、移动行李箱等众多“黑科技”。而北醒不仅展示了性能卓越的固态激光雷达,在
2018-01-26 09:19:09
``一年一度的国际消费类电子产品展览会(CES)已经完满收官,短短的几天时间里,我们见识了Intel无人飞机灯光秀、百度无人车、移动行李箱等众多“黑科技”。而北醒不仅展示了性能卓越的固态激光雷达,在
2018-01-25 09:36:04
`我们已经对单线激光雷达司空见惯,其旋转线扫的测量方式导致造成寿命问题和价格居高不下。 因此,北醒研发了CE30,它是一款具有大视场角的固态激光雷达。它可同时输出132°水平视场、9度垂直视场范围内
2018-01-04 10:18:39
``一年一度的国际消费类电子产品展览会(CES)已经完满收官,短短的几天时间里,我们见识了Intel无人飞机灯光秀、百度无人车、移动行李箱等众多“黑科技”。而北醒不仅展示了性能卓越的固态激光雷达,在
2018-01-25 09:41:33
来检测物体。激光雷达系统的视场 (FOV) 决定了激光雷达能够捕捉到的图像的宽度,因此该视场对于自动驾驶决策算法十分重要。扩大FOV的方法有很多种,其中之一就是利用机械扫描,使用电机帮助实现360度
2022-11-03 07:12:38
1、概述由于课题要求,需要设计一款适合于果园应用的激光雷达。因此采用单线扫描激光雷达和角度传感器来设计能采集二维数据的激光雷达。关于数据的转化的理论,我们可以查阅相关文献。在此,只讲基本的构造和程序
2021-11-12 08:15:02
。单线激光主要用于规避障碍物,由于单线激光雷达比多线和3D激光雷达在角频率和灵敏度反映更加快捷,所以,在测试周围障碍物的距离和精度上都更加精确。但是,单线雷达只能平面式扫描,不能测量物体高度,有一定
2017-09-25 11:30:10
。前者是指,给无人车设定目的地,从出发地到目的地,走哪条路最好。后者指,在行进过程中,遇到障碍、行人、车辆、甚至小动物等,怎样获得理想的行进路径。激光雷达地图信息杂乱而庞大谷歌、福特和百度等公司正在大力
2017-10-23 17:51:41
图2:安防激光雷达、摄像头、报警器多手段协同激光雷达+安防监控优势近年来,激光雷达技术飞速发展,从简单的激光测距技术,逐步发展出激光跟踪、激光测速、激光扫描成像、激光多普勒成像等技术。其工作环境也从
2020-02-29 17:03:44
半径魔咒中,而现在,能轻松实现25米+的测距半径,未来,会更长。 (2)测量频率 较高的扫描频率可以确保安装激光雷达的机器人实现较快速度的运动,并且保证地图构建的质量。现在,市面上的雷达已经能实现
2019-02-15 15:12:28
近年来,随着雷达技术的发展和普及,科技大片中的无人驾驶离我们越来越近。全球很多中高档汽车已经开始配备汽车雷达。目前用于汽车上的雷达分为超声波雷达、毫米波雷达、激光雷达等,不同的雷达工作原理不同,性能
2019-09-19 09:05:02
激光雷达的硬件成本,比如研发固态激光雷达并真正实现产业化,届时成本会下降到几百美金。总之,现在自动驾驶领域有三大核心问题需要着力突破:即利用人工智能,尤其是利用深度学习进行目标识别、自主导航和信息融合,这
2017-09-06 11:36:58
自动导航车(Automatic Guided Vehicle,即AGV)领域的固态激光雷达CE30。对比传统的机械式激光雷达,激光雷达是通过机械转轴的高速旋转来完成四周环境的扫描。固态激光雷达顾名思义
2017-12-07 14:47:45
iphone12这个亮点不在5G上面,毕竟国内的一些厂商早就已配备,也不在颜色,重点在于配备了一颗激光雷达!先说一下这个激光雷达带来的用途,最直接的就是能够快速精准对焦,即使在晚上也能够很好实现
2021-07-22 09:12:51
空间激光雷达最小接收光功率的计算【摘要】采用信号检测的统计思想,在详细分析雷达接收机各种噪声大小与概率分布、计算空间背景光大小和光谱特性的前提下,基于信号检测理论中的虚警概率和发现概率提出了一种能
2009-05-15 01:20:13
自制低成本3D激光扫描测距仪(3D激光雷达)
2021-03-04 10:51:54
自制低成本3d激光扫描测距仪激光雷达
2020-05-27 16:23:12
(毫米波)雷达。正如上文提到的,在目前的自动驾驶中,激光雷达有单线激光雷达和多线激光雷达之分。其中,单线激光雷达主要通过一个高重频脉冲激光测距仪,加上一个一维旋转扫描来实现测量。而它的角分辨率可高于多线
2018-09-10 14:21:58
周围障碍物的距离,误差仅为毫米级。商场导引导购机器人这是目前在商场里经常能看到的服务型机器人。该产品采用360度激光雷达扫描测距传感器,可实现机器人自主同步建图及定位导航,适用于室内陪护、酒店前台、商场
2018-09-10 16:32:46
请问激光雷达和激光扫描仪的具体区别在哪儿?
2022-05-13 11:05:19
激光雷达是如何产生的?激光雷达在自动驾驶领域有什么作用?
2021-06-17 07:31:54
国内激光雷达厂商速腾聚创宣布已经为多线激光雷达量产做好充分准备,已可以向无人驾驶测试和研发机构及时供应激光雷达及配套设备。 目前,速腾聚创已经为激光雷达产品投入二十多条生产线,并将以每周十条左右
2017-08-21 14:54:32
`历经40余年的发展,激光雷达技术已从最初的激光测距技术,逐步发展了激光跟踪、激光测速、激光扫描成像、激光多普勒成像等技术,因此出现了各种不同种类的激光雷达,被广泛应用于各个领域,激光雷达在很多
2018-12-10 14:55:39
请问各位大咖,激光雷达的测量距离能到多少?
2022-10-05 03:18:49
CB64S1大视场补盲激光雷达是专为扫除盲区设计的产品,其拥有180°x40°的超广视场 角,测量精度精确至±3cm,能够高效识别近距离范围内的障碍物,为汽车、机器人、AGV 的行驶盲区带来精准的环境感知。
2022-07-01 10:44:22
(Comprehensive Cleaning System),以满足L3~L5级别智能驾驶车载激光雷达的全天候工作和清洁需求。 产品功能 实现激光雷达的伸出
2024-11-28 11:25:29
。现在谷歌、百度、奥迪、福特、宝马等企业都在逐渐使用激光雷达的感知解决方案,已经成为了无人驾驶技术中的最基本的配置了。 激光雷达总的来说,分为机械扫描激光雷达、固态激光雷达。然后根据线数图通,产品还分为 2D、2.
2018-05-21 16:37:029831 MEMS微镜已经存在多年,甚至在视频投影机这样的日常设备中得到了应用。当今MEMS微镜的问题在于很难将其用于远距离激光雷达。远距离探测和大视场角是激光雷达的关键性能指标。典型的MEMS微镜的镜面尺寸小,偏转角度较小,因此无法达到理想的探测距离和视场角。
2019-04-16 11:33:4415544 ,以此来聚焦特殊物体,采集更远更小物体的细节信息并对其进行识别,这是传统机械激光雷达无法实现的。MEMS整套系统只需一个很小的反射镜就能引导固定的激光束射向不同方向。由于反射镜很小,因此其惯性力
2019-08-13 14:09:413782 ,本次合作的达成意味着未感科技凭借其在激光雷达领域的自主研发能力,实现了盘煤(料)仪行业高端进口激光雷达的国产替代。 360°扫描激光雷达SF 系列 本次合作年计划采购量数百个,已实现部分交付。终端产品将应用于料场管控智能
2021-07-02 14:22:232329 1、概述由于课题要求,需要设计一款适合于果园应用的激光雷达。因此采用单线扫描激光雷达和角度传感器来设计能采集二维数据的激光雷达。关于数据的转化的理论,我们可以查阅相关文献。在此,只讲基本的构造和程序
2021-11-06 20:21:01 151
151 扩大 FOV 的方法有很多种,其中之一就是利用机械扫描,使用电机帮助实现 360 度 FOV。无刷直流 (BLDC) 电机可以实现此目标,且高效低噪,因此广受欢迎。
2022-04-06 15:34:443006 
激光雷达是什么? 激光雷达(英文:Lidar),激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强等
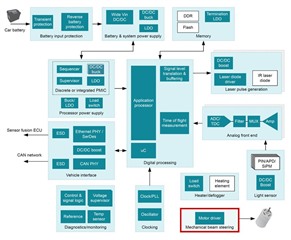
2022-06-20 16:53:4125992 自动驾驶决策算法十分重要。扩大FOV的方法有很多种,其中之一就是利用机械扫描,使用电机帮助实现360度FOV。无刷直流 (BLDC) 电机可以实现此目标,且高效低噪,因此广受欢迎。
图1展示了激光雷达
2022-06-30 17:01:382800 
SOSLAB与纵慧芯光(Vertilite)并肩作战,开发出ML(Mobility LiDAR)系列激光雷达,突破了被认为固态激光雷达的局限:距离和视场角的问题,SOSLAB正在通过ML系列纯固态激光雷达加速进入全球汽车市场。
2022-08-23 14:46:432009 围绕激光雷达硬件,Luminar还提供感知软件,能够通过过滤激光雷达探测的点云数据,评估扫描的可靠性,确保车辆在雨雪、雾霾天气当中的正常运行。目前,Luminar正在开发全栈式解决方案,命名为“哨兵
2022-10-09 09:28:311916 要实现大范围空间感知,激光雷达光源必须能够对大视场(FoV)进行扫描。然后,通过测量每个方向的飞行时间,逐点检测场景中的对象,以构建光学回波图。调幅连续波(AMCW)、调频连续波(FMCW)或步进频率连续波(SFCW)等其他测量原理采用恒定或时间调制频率的连续波来测量调制光信息的往返时间。
2022-10-18 16:13:262253 这就是机械式激光雷达,靠电机带动旋转使激光束可以360度全方位扫描。目前市面上的雷达类型多按扫描方式进行区分,按照扫描方式有无机械转动部件可分为机械旋转、混合固态、纯固态三种。整体发展趋势从机械式向纯固态演变。
2022-10-20 14:37:331574 使用BLDC电机助力机械扫描激光雷达实现360度视场
2022-10-28 11:59:541 使用BLDC电机帮助实现360度FOV
2022-12-22 17:41:141080 
、物流、建筑和海事等。 * Innoviz360激光雷达具有革命性的360°扫描设计,最大垂直视场为64˚,范围为300米。 * 在宣布推出仅一年后,革命性的Innoviz360激光雷达将于
2023-01-10 22:07:491306 全新轻量型Innoviz360激光雷达可实现每帧多达1280条扫描线,而且帧速可配置,分辨率为0.05°x 0.05°,扫描距离为300米。Innoviz360的设计使用了InnovizTwo
2023-01-16 11:49:241694 通常激光雷达可以分为两大类:机械式激光雷达和固态激光雷达。机械式激光雷达采用机械旋转部件作为光束扫描的实现方式,可以实现大角度扫描,但是装配困难、扫描频率低。
2023-02-21 11:18:555198 根据扫描方式的不同,激光雷达可分为机械式、半固态(又叫混合固态)和固态三种(1)。
2023-03-08 14:41:006974 激光雷达即激光探测及测距系统,是通过发射激光束来探测目标位置、速度等特征量的雷达系统。按扫描维度,激光雷达可分为一维激光雷达、二维激光雷达和三维激光雷达。
2023-05-10 09:58:3310062 
当前激光雷达技术方案的分歧点在于扫描方式,所以通常按照扫描方式来分,可以分为:械旋转激光雷达,混合固态激光雷达和全固态激光雷达。 机械激光雷达,是指其发射系统和接收系统存在宏观意义上的转动,也就是通过不断旋转发射头,将速度
2023-05-16 08:43:451556 
机载激光雷达(也称机载激光扫描)是一种激光扫描仪,在飞行过程中连接到飞机上,创建一个3D点云地形模型
2022-02-20 10:00:055597 
电子发烧友网站提供《Arduino激光雷达扫描和Java渲染.zip》资料免费下载
2023-06-25 15:14:141 简述激光雷达的结构原理分类及特点 TIM320激光雷达的工作原理 激光雷达是一种高精度的探测装置,可以在三维空间中进行高精度的距离测量和空间信息采集。激光雷达的主要结构包括光源、扫描系统、接收系统
2023-08-22 16:45:304493 能够通过激光雷达的实时检测和扫描,获得高精度的环境地图,从而在行驶过程中做出正确的决策。本文将详细介绍机械激光雷达的组成,并逐一探索每个部分的功能和原理,以期更好地了解机械激光雷达的工作原理和应用。 机械激光
2023-08-23 16:14:273362 激光雷达的扫描方式主要有哪些? 激光雷达是一种利用激光束进行反射和时间测量得出目标距离和位置信息的设备,在无人驾驶、自动驾驶和地图绘制等领域有着广泛的应用。激光雷达的扫描方式是指激光雷达在工作时所
2023-08-23 16:14:335576 激光雷达的基本构成 激光雷达前景分析 激光雷达基本构成 激光雷达是利用激光信号进行测距的设备,其基本构成包括激光器、扫描机构、接收器、信号处理单元和数据输出单元。 (1)激光器:激光雷达的核心部件
2023-08-23 16:28:084662 激光雷达导航是通过360度旋转雷达对周围10米以内平面空间进行扫描,并生成平面地图;根据雷达扫描出来的平面地图结合碰撞、沿墙等不同的传感器取得的数据来进行自主定位、导航、路径规划等SLAM算法。
2021-11-17 10:10:251866 
发射一条激光束,而多线激光雷达则同时发射多条激光束。单线激光雷达通常使用旋转镜和激光二极管的组合来扫描周围环境。它通过旋转镜的旋转来改变激光束的方向,并通过激光二极管发射脉冲激光。而多线激光雷达则可以通过多个激
2023-12-07 15:48:336717 文章大纲 城市 NOA 成竞争高地,政策助力高阶智能驾驶加速落地 成本下探+智驾升级,2030年激光雷达市场规模有望超万亿 ·城市 NOA面临工况复杂问题,激光雷达为“优选
2024-06-27 08:42:272158 
LiDAR(Light Detection and Ranging,激光探测与测距)是一种利用激光技术进行距离测量和成像的技术。LiDAR激光雷达扫描仪具有高精度、高分辨率、快速扫描等特点,广泛应用
2024-08-29 16:58:562888 电子发烧友网站提供《使用逻辑和转换优化机械扫描激光雷达.pdf》资料免费下载
2024-09-03 09:27:020 。随着技术的发展,激光雷达经历了从机械式到半固态再到固态的演变过程。本文将深入探讨固态和半固态激光雷达的工作原理、特点及其应用。 一、半固态激光雷达 半固态激光雷达是介于机械式和固态激光雷达之间的一种过渡形态,它通过部分机械运动实现扫描。半固态激光
2024-12-23 18:06:194025 来探测物体。白天或黑夜下的物体与车之间的距离。甚至由于反射度的不同,车道线和路面也可以区分。光束无法探测到被遮挡的物体。 2.激光雷达的关键参数 点频:每帧水平方向平均点数x垂直方向平均点数x帧率=(水平视场角/水平角分辨率)×(垂直视场角/垂直角分辨率) 扫描频率:10Hz就代表每秒扫描10次
2025-04-25 11:48:582379 
摘要这款DIY的PiLiDAR扫描仪项目利用树莓派进行激光雷达测绘。激光雷达通过发射激光来扫描周围环境,从而创建三维模型。该项目需要树莓派4、摄像头、电机以及激光雷达套件。你是否了解过激光雷达扫描
2025-06-01 08:33:15899 
形式的不同,激光雷达可以大致分为机械式(Mechanical)、半固态(Semi-solid-state)和全固态(Solid-state)三种类型。 机械式激光雷达依靠电机驱动转盘或棱镜实现激光束的360度旋转扫描;半固态激光雷达在接收或发射模块实现静止,只有扫描部件
2025-06-05 09:04:451210 
相比,激光雷达不受光线的影响,探测距离更远、精度更高、抗干扰能力更强。 上图示例为车载激光雷达采集到的三维点云。最早应用于无人车的机械式激光雷达借助电机驱动旋转镜体,实现360度水平扫描,因此视场角大、探测距离远、点云
2025-07-11 09:02:29824
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论