 电子发烧友App
电子发烧友App


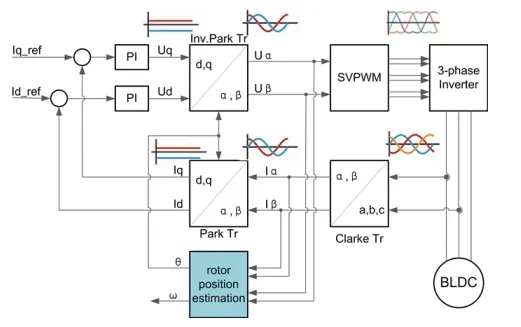
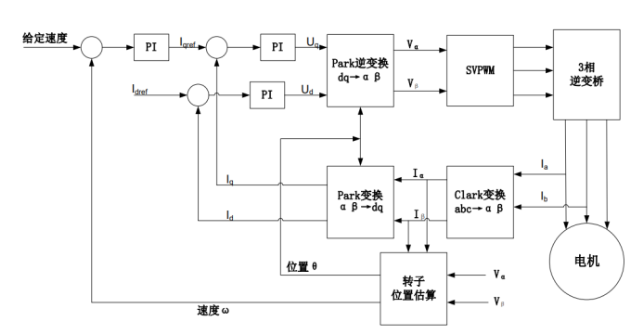
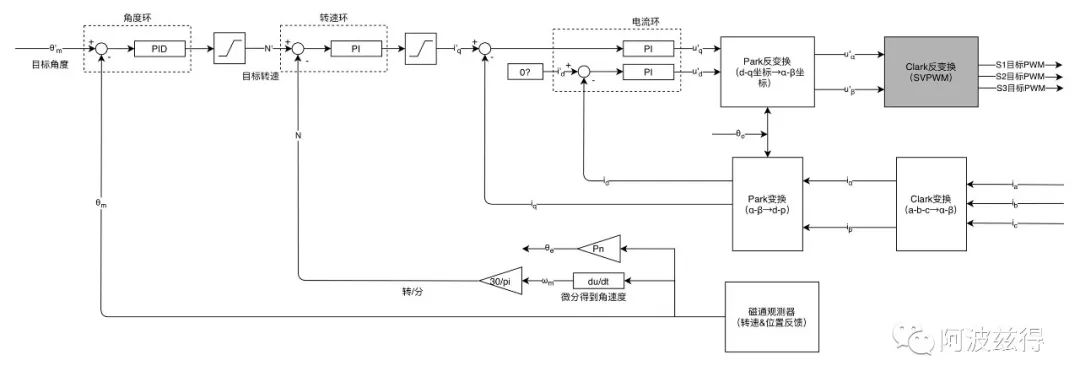
FOC算法(Field-Oriented Control,场定向控制算法)是一种常用于交流电机控制的算法。它的目标是将交流电机的控制问题转换为直流电机的控制问题,从而使得交流电机可以像直流电机一样被有效控制。
FOC算法的基本思想是将交流电机转换为一个等效的直流电机模型,通过控制电机的电磁场方向和大小来控制电机的转速和扭矩。
电机扭矩和什么有关:
电机扭矩是指电机输出的转矩大小,也就是电机转子所产生的力矩。
在直流电机中,电机扭矩与电枢电流成正比,与磁场强度成正比,与极对数成正比;
在交流电机中,电机扭矩与电源电压、电流、功率因数、电机转速。
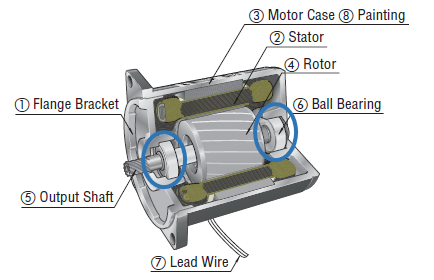
什么是交流电机?
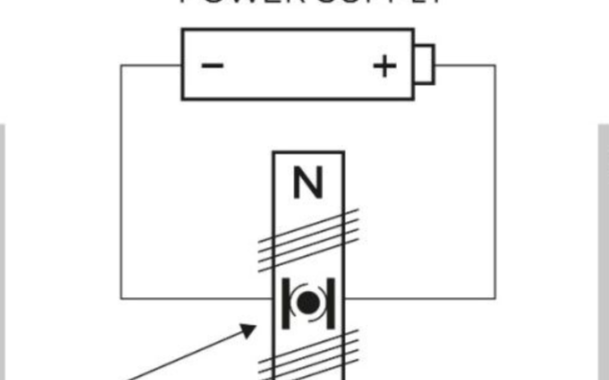
交流电机通常由两部分组成:定子和转子。定子是一个不动的部件,通常由若干个线圈和铁芯构成。当电流通过定子线圈时,会在铁芯中产生磁场。转子是一个旋转的部件,通常由若干个磁极和铁芯构成。当磁场在定子铁芯中旋转时,它会在转子铁芯中产生感应电流,从而使转子开始旋转。
交流电机的运行原理基于磁场的相互作用和电磁感应现象。当交流电流通过定子线圈时,它会在定子铁芯中产生磁场,这个磁场会随着电流的变化而周期性地改变方向。由于转子铁芯中感应到的磁场也是周期性地改变方向,因此转子会产生旋转运动。
和直流电机的区别:
1.供电方式不同:交流电机采用交流电源供电,而直流电机采用直流电源供电。
2.构造不同:交流电机和直流电机的内部结构和构造不同。交流电机的转子和定子都包含线圈,它们的磁场相互作用产生电动力。而直流电机的定子通常是静止的,它的磁场产生电动力与转子的磁场产生电动力相互作用。
3.调速方式不同:交流电机的转速通常是由电源频率决定的,而直流电机的转速可以通过改变电源电压或者改变电枢电流来调节。
4.应用场合不同:交流电机适用于高功率、高速、低载荷的场合,如空调、电冰箱、电风扇等。直流电机适用于需要调速和反转控制的场合,如电动汽车、电动工具等。
直流电是指电流方向不变的电流,即电荷在电路中只沿一个方向移动的电流。 交流电是指电流方向和大小都随时间变化的电流。 它的电流方向在时间上周期性地变化,即正负交替变化。 通常情况下,交流电的频率是指单位时间内电流正负周期性变化的次数,单位为赫兹(Hz),而电压和电流的大小则会随着时间的变化而不断变化。 与交流电相比,直流电的优点是电压稳定,不容易产生电磁干扰,适用于一些对电源质量要求较高的场合
1.交流电转直流电:这个过程通常称为整流,可以使用二极管或者桥式整流电路实现。 二极管整流只能将单相交流电转换为单极(直流)电,而桥式整流电路可以将三相或单相交流电转换为直流电。
2.直流电转交流电:这个过程通常称为逆变,可以使用逆变器实现。 逆变器可以将直流电转换为交流电,并且可以实现输出不同频率和电压的交流电,因此逆变器被广泛应用于家庭电器、电动车、太阳能等领域。
什么是相位电压?
相位是指某个物理量的周期性变化相对于某个参考点的时间偏差,通常以角度或弧度的形式表示。
相位电压是指在交流电路中,某一相电压相对于电路的共同中性点或地点的电压大小和相位角度。
在三相交流电路中,相位电压是指每个相线与电路的共同中性点或地点之间的电压差。 如果电路的中性点与地点相同,则相位电压就是每个相线之间的电压差。 与相位电压相关的概念还包括线电压和有效电压。
相电压是指在多相电路中,每个相线与电路的中性点之间的电压差,也可以称为相间电压。 相电压是多相交流电路中的一种电压表示方式。
在三相交流电路中,相电压是指每个相线之间的电压差,即A相电压与B相电压、B相电压与C相电压、C相电压与A相电压之间的电压差。 在三相电路中,相电压的大小一般是线电压的根号3倍。
线电压是指交流电路中相邻两个相线之间的电压大小,有效电压是指交流电路中产生等效功率的电压大小。
PWM代表脉宽调制(Pulse Width Modulation)。 它是一种常用于电子设备和电路中的调制技术,用于控制电子信号的大小、形状和频率。 从数学的角度来看,PWM是一种周期性的数字信号,由一个固定频率的载波信号和一个可变占空比的调制信号组成。
PWM信号的周期是固定的,由载波信号的频率决定; 而占空比则是可变的,表示调制信号在一个周期内处于高电平的时间与整个周期时间的比例。 占空比越大,输出电压或电流的平均值越高,反之亦然。 也就是说控制一个周期内电信号的脉冲宽度和频率,来控制输出电压或电流的大小。 通常,一个周期内的脉冲宽度和频率是可以调节的,从而可以控制输出信号的平均值和波形。
1.载波频率:也称为PWM信号的工作频率,通常是固定的,一般选择几千赫兹至几十千赫兹的频率,以保证足够高的调制精度和低的失真。
2.调制波形:这是用于控制PWM信号占空比的调制信号,可以是模拟信号或数字信号。 在数字控制系统中,调制波形通常是一个由微处理器或FPGA生成的数字信号。
3.占空比:占空比是指PWM信号中高电平时间与一个周期时间之比。 在实际应用中,占空比通常是由调制波形的幅值来控制的。 例如,当调制波形的幅值为0时,PWM信号输出为低电平; 当调制波形的幅值为最大值时,PWM信号输出为最大的高电平。
当确定了这三个参数后,PWM信号就可以通过将调制信号与载波信号相乘来生成。 由于载波频率固定,而调制信号占空比可变,所以PWM信号的平均值可以通过改变占空比来控制。
PWM波如何生成?
1.使用计时器/计数器:在单片机或数字信号处理器(DSP)等数字电路中,可以使用计时器/计数器来生成PWM波形。 计时器/计数器通过计算指定的时间间隔来产生定时的脉冲信号,通过改变脉冲的占空比,即脉冲宽度与周期的比值,来生成PWM波形。
2.使用模拟电路:可以使用模拟电路来生成PWM波形。 例如,通过将输入信号与三角波信号进行比较,可以生成PWM波形。 比较器可以使用运算放大器或其他器件实现。
51定时器,我以前写过:
1.定时器0:定时器0是8位定时器,它具有13位计数器。 它可以通过不同的工作模式(模式0、模式1、模式2和模式3)来实现不同的计时和计数功能。 一般情况下,定时器0被广泛应用于控制延时,计数频率可达到最大12MHz。
2.定时器1:定时器1是16位定时器,它具有16位计数器。 它可以通过不同的工作模式(模式0、模式1、模式2、模式3、模式4和模式5)来实现不同的计时和计数功能。 定时器1的计数频率可以达到最大6MHz。
定时器的工作原理是:当定时器开始计时时,定时器计数器开始计数,计数值不断增加,当计数器的值达到指定的计数值时,定时器会发出一个中断信号。 中断服务程序可以在定时器溢出时执行一些特定的操作.
将输入信号与三角波信号进行比较,可以生成PWM波形的原理基于比较器的输出。 在这个过程中,输入信号被与一个参考电压进行比较,输出结果被称为比较器的输出。
具体来说,PWM信号的生成过程如下:
1.产生一个三角波信号,其频率应该足够高,以保证PWM信号的平滑度和精度。 一般而言,三角波信号的频率应该在几千赫兹到几十千赫兹之间。
2.产生一个参考电压,该参考电压的大小与所需的占空比有关。 例如,如果需要产生50%的占空比,则参考电压应该为输入信号幅值的一半。
3.将输入信号与参考电压进行比较。 当输入信号的幅值高于参考电压时,比较器的输出为高电平; 当输入信号的幅值低于参考电压时,比较器的输出为低电平。
4.将比较器的输出与三角波信号进行比较。 当三角波信号的幅值高于比较器输出时,PWM信号为高电平; 当三角波信号的幅值低于比较器输出时,PWM信号为低电平。
5.重复上述过程,即可生成所需占空比的PWM信号。
需要注意的是,实际应用中,需要对比较器的输出进行去抖动处理,以避免输出的瞬时变化引起的错误。 去抖动的方法包括加入滤波器或使用斯密特触发器。
施密特触发器是一种具有滞回特性的触发器,常用于信号去噪、脉冲形变、数字信号处理等领域。 其特点是在输入信号的上升沿或下降沿经过某一阈值后,输出信号会发生反转,从而产生一个宽度固定的矩形脉冲信号。
施密特触发器通常由一个比较器和一个正反馈电路组成。当输入信号的幅值高于一定的阈值时,比较器的输出将变为高电平,然后通过正反馈电路将输出信号反馈回比较器的非反相输入端。在此情况下,输入信号即使变得微弱,输出信号仍将保持高电平。只有当输入信号的幅值低于一定的阈值时,比较器的输出才会变为低电平,并将反馈信号反向,使得输出信号保持低电平。通过这种方式,施密特触发器可以实现信号的滞回特性,并且可以有效去除噪声干扰。
什么叫信号的滞回特性?
信号的滞回特性是指在输入信号的变化过程中,输出信号的变化具有一定的延迟和滞后现象。通常情况下,信号的滞回特性是由非线性元件引起的,例如施密特触发器、电感、电容、晶体管等。
在施密特触发器中,当输入信号的幅值高于一定的阈值时,输出信号会从低电平变为高电平,并将反馈信号反向,从而实现信号的滞回特性。这种特性可以有效地去除噪声干扰,提高信号的稳定性和可靠性。
在电感、电容等元件中,信号的滞回特性通常表现为元件的存储效应。例如,当电容器充电时,输入信号的幅值高于一定的阈值时,电容器将开始充电,并在输入信号降至一定阈值以下后,电容器仍将保持一定的电荷,从而实现信号的滞回特性。
在晶体管等半导体元件中,信号的滞回特性通常表现为元件的开关效应。例如,当输入信号的幅值高于晶体管的截止电压时,晶体管将开始导通,并在输入信号降至一定阈值以下后,晶体管仍将保持导通状态,从而实现信号的滞回特性。
什么是非线性器件?
非线性元件是指其电特性不符合线性关系的电子元件。通常情况下,电子元件的电流与电压之间存在线性关系,即符合欧姆定律,但是某些元件的电流与电压之间并不符合线性关系,这些元件就被称为非线性元件。
正弦PWM(SPWM,Sine wave Pulse Width Modulation)也是一种常用的PWM技术。它的主要特点是生成的PWM信号的调制波形为正弦波形,可以减小输出信号的谐波含量,降低电磁干扰,并提高输出波形的质量和稳定性。
在正弦PWM技术中,调制波形为正弦波,而载波信号为方波。 通过将正弦波和方波进行比较,可以得到PWM信号的占空比。 具体来说,当正弦波的幅值大于方波时,PWM信号输出高电平; 当正弦波的幅值小于方波时,PWM信号输出低电平。 通过不断改变正弦波的频率和幅值,可以控制PWM信号的输出电压和频率。
正弦PWM技术常用于电机控制,它具有谐波含量低、输出波形质量高、输出功率稳定等、优点,能够提高设备的效率和性能。
在物理学和电气工程中,谐波指的是一个频率是基波的整数倍的周期性信号分量。 例如,对于一个频率为50Hz的正弦波信号,它的基波频率为50Hz,那么50Hz的2倍、3倍、4倍、5倍等分量的频率就分别为100Hz、150Hz、200Hz、250Hz等,这些分量就被称为50Hz信号的第2、3、4、5次谐波。
什么叫方波?
方波(Square Wave)是一种周期为T的周期性信号,它的波形是由两个不同的电平(通常是正电平和负电平)交替出现组成的,即在一个周期内先从一个电平跳跃到另一个电平,然后又跳回到原来的电平,如此循环。
在时域上,方波呈现出矩形的波形,其上升沿和下降沿的时间长度相等,且保持平顶的时间长度也等于上升和下降沿的时间长度,即占空比为50%。 可以用来产生其他类型的波形,如矩形波、锯齿波等,并且在数字电路中可以用来代表逻辑1和逻辑0。
占空比的意思是?
占空比(Duty Cycle)是一种用于描述脉冲信号特征的参数,通常用百分比表示。 它指的是脉冲信号中高电平(或低电平)的持续时间与整个脉冲周期的比值。
具体来说,对于一个周期为T的脉冲信号,其高电平持续时间为t1,低电平持续时间为t2,则占空比D可表示为:
D = (t1 / T) × 100%
其中,t1 + t2 = T。 如果脉冲信号中高电平的持续时间占整个周期的50%,则占空比为50%。
在PWM(Pulse Width Modulation)技术中,占空比用于控制输出电压的大小,通常采用调节高电平持续时间的方式来实现。 当占空比越大时,输出电压越高; 反之,当占空比越小时,输出电压越低。
什么叫空间矢量PWM?
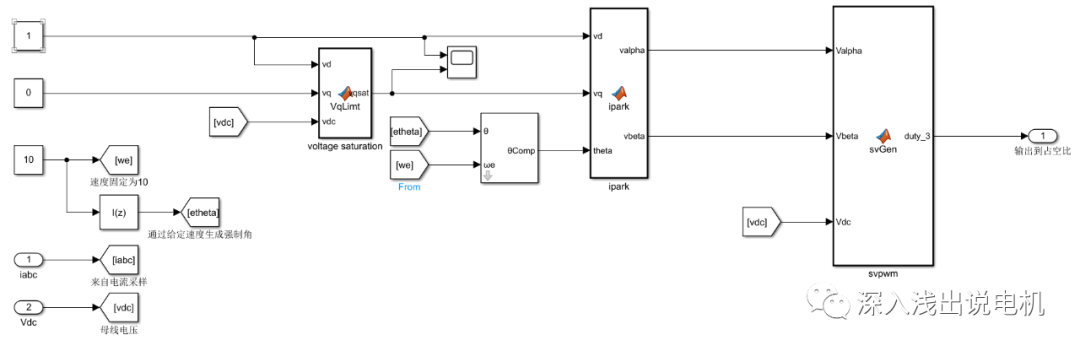
空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)是一种常用于交流电机控制的PWM技术,它通过计算电机磁通的空间矢量和控制电压的空间矢量之间的关系,实现对电机的精确控制。
SVPWM技术是基于矢量控制原理的一种PWM技术,它将三相交流电压分解为两个正交轴上的矢量,即d轴和q轴矢量,通过调节这两个矢量的大小和相位角度,控制电机的转矩和转速。 在SVPWM技术中,电机的磁通矢量被分解为两个正交轴上的矢量,即d轴磁通和q轴磁通,通过调节这两个矢量的大小和相位角度,实现对电机的磁通和电流的控制。
SVPWM技术的优点是输出电压波形接近理想正弦波,具有高精度和高效率等特点,能够提高电机的运行效率和降低噪声。
什么叫电机磁通?
电机磁通是指在电机内部产生的磁场,它是电机正常运行的必要条件之一。 电机磁通可以由电机中的线圈通过通电产生,也可以由永磁体在电机内部产生。
在交流电机中,电机磁通的大小和方向会随着电机运行状态的改变而发生变化。
例如,当电机正常运行时,由于定子线圈中的交流电流的变化,会在电机内部产生一个旋转的磁场,这个磁场的大小和方向会随着时间而改变,这就是所谓的转子磁场。 而由于转子磁场的存在,会在电机内部产生一个旋转的电动势,从而驱动电机运行。
在直流电机中,电机磁通的大小和方向可以通过调节电机中的磁场产生方式来实现。
例如,通过改变电机中的磁极数或调节电枢电流的大小和方向,可以实现对电机磁通的控制。
什么是Park算法?
Park变换是一种用于交流电机控制的算法,可以将三相交流电机转换为以磁场旋转轴和垂直于磁场旋转轴的两个轴上的直流电机。 这样,可以通过控制转子磁场在旋转坐标系中的坐标值来实现电机转速和转矩的控制。
Park变换算法的主要思想是将三相交流信号转换为两个正交轴上的信号,即d轴和q轴信号。 其中d轴信号与磁场旋转轴对齐,q轴信号与d轴信号垂直。 通过控制d轴信号和q轴信号的大小和相位,可以实现对电机的转速和转矩进行精确控制。
什么是Park变换里面的磁场旋转轴
在Park变换中,磁场旋转轴通常是指电机磁场旋转的方向。 在交流电机中,由于电流的周期性变化,电机内部会产生旋转的磁场。 这个旋转的磁场可以看做是一个矢量,它的方向和大小随着时间而变化。
在Park变换中,我们需要将这个旋转的磁场投影到d轴和q轴上,以便对电机进行控制。 因此,我们需要选取一个磁场旋转轴作为参考。 一般情况下,我们选择电机的磁场旋转方向作为磁场旋转轴,这样可以使得d轴信号与电机磁场方向对齐,q轴信号与d轴信号垂直。
d轴和q轴的意思:
在Park变换中,d轴和q轴是两个正交的坐标轴,它们通常被用来描述电机内部磁场的方向和大小。 其中,d轴通常与电机内部磁场的方向对齐,q轴则垂直于d轴。
具体来说,d轴通常被定义为电机内部磁场旋转轴方向,因此它的方向是固定的。 而q轴则垂直于d轴,其方向取决于d轴和q轴构成的坐标系的选择。 在通常的情况下,我们选择d轴和q轴构成的坐标系与电机的永磁体磁场方向对齐,因此q轴方向就是永磁体磁场方向的垂直方向。
使用d轴和q轴描述电机内部磁场,可以将三相交流电机转换为以d轴和q轴为坐标轴的直流电机。 这样,我们就可以通过控制d轴和q轴上的电压或电流来控制电机的转速和转矩。
什么是Clarke变换?
Clarke变换是一种常用的三相电机控制中的坐标变换方法。 它是将三相交流电信号从三相坐标系(abc坐标系)变换到两相坐标系(αβ坐标系)的线性变换方法。
Clarke变换将三相电信号的瞬时值通过一个线性变换映射到一个新的二维坐标系中,其中α轴与三相电信号的相互作用最小,而β轴则包含了所有的相位信息。 这种变换的主要目的是将三相电信号转换为两个等效的信号,其中一个信号与α轴的投影成正比,而另一个信号与β轴的投影成正比。
什么是SVM表
SVM表是一种用于描述空间矢量调制(SVM)的工具,其中SVM是一种常见的电力电子控制技术,用于控制交流电机、电网等系统。
SVM表是一个二维表格,其中每个单元格对应于一个矢量,用于描述控制器产生的输出信号。SVM表的横轴和纵轴分别代表电压空间矢量的d轴和q轴分量,每个单元格中的数值表示该空间矢量的大小和方向。
SVM表中每个单元格对应于一种电压空间矢量,通常使用极坐标来描述。每个单元格中的数字表示该矢量的长度,而单元格的位置和角度则表示该矢量的方向。通过对SVM表进行解析,控制器可以选择最合适的空间矢量来驱动交流电机或控制电网,以达到最优的控制效果。
极坐标是用来描述平面上一个点的坐标系,它使用极径和极角两个参数来确定点的位置。在极坐标系中,点的位置由一个非负实数(极径)和一个角度(极角)来确定。极径表示点与坐标原点的距离,而极角表示点与某个固定轴之间的角度。极坐标通常用于描述圆形、椭圆形和其他具有圆形对称性的图形。
在极坐标系中,通常将坐标原点称为极点,将固定的轴称为极轴。极角通常以弧度制表示,从极轴正方向开始逆时针方向测量,范围为0到2π。因此,每个点在极坐标系中都可以表示为(r,θ),其中r表示极径,θ表示极角。
旋转坐标是一种坐标变换方法,它通过旋转坐标系来描述平面上的点。在旋转坐标系中,坐标轴会绕着一个固定点旋转一定的角度,从而改变点在坐标系中的位置。
旋转坐标系通常由两个参数来描述:旋转角度和旋转中心。旋转角度表示坐标轴绕旋转中心旋转的角度,可以是正值或负值,表示顺时针或逆时针方向旋转。旋转中心是坐标系绕其旋转的点,可以是任何平面上的点。
在旋转坐标系中,一个点的坐标通常表示为(x,y),其中x和y分别表示点在原始坐标系中的水平和垂直坐标。通过旋转坐标系,可以将点的坐标变换为(x',y'),其中x'和y'分别表示点在旋转后的坐标系中的水平和垂直坐标。这种变换可以使用矩阵乘法来实现,其中矩阵包含旋转角度和旋转中心的信息。
审核编辑:汤梓红















 工商网监
工商网监
评论