 电子发烧友App
电子发烧友App


交流电机是将交流电能转换为机械能的机械转动器件。交流电机通过利用磁场转动力的原理,将电能转换为机械能,从而达到动力传输和机械工作的目的。
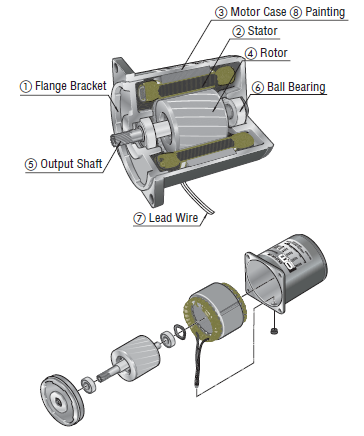
交流电机的基本原理是在电磁场的作用下,导体中的电流会受到力的作用,产生一个旋转力矩,从而驱动电机转动。交流电机通常由定子和转子两部分构成,其中定子部分通常由若干个发电机线圈和其它电磁设备构成,而转子部分通常由通孔型或鳞片型端部等制成。
交流电机的工作原理基于电磁感应和磁场转动力的相互作用。电机中由外接电源提供交流电,通过转矩变形器在定子线圈中产生一个交流磁场,而转子则由永磁铁或由用户提供的电源来提供磁场。在定转子中的磁场相互作用下,转子便得以旋转,从而有效地将电能转化为了机械动能。
交流电机种类繁多,它们的工作原理和组成也各不相同。当前最常见的交流电机是三相异步电机,其基本工作原理是在三相交流电的作用下,定子线圈中产生了一个旋转磁场,使得机械部分的转子被迫跟随其运动。而另外一种交流电机则是同步电机,它的转子和定子转速具有严格的同步关系,功率密度和效率要比异步电机更高。
总之,交流电机是一种将交流电能转换成机械能的机械转动器件,其基本工作原理是利用电磁感应和磁场转动力的相互作用。交流电机种类繁多,应用广泛,不同的类型在使用时具有各自的优点和不足之处。
伺服电机的概念和工作原理
伺服电机是一种可以根据外部的控制信号调整输出的力矩、转速和位置等参数的电动机。它通常由电动机、减速器以及专门的电子控制系统等组成,具有非常高的精度和可编程性,可以根据不同工作场合实现不同的转速、负载等参数的定制。
伺服电机的工作原理如下:伺服电机通过外部反馈装置(如编码器、传感器等)采集系统反馈信号,将其与目标信号进行比较和分析,从而改变控制信号的幅度、频率和相位,调整输出的动态性能和精度。控制器内置了比例、积分和微分(PID)算法,一般情况下,反馈信号和目标信号之间的误差越小,输出的控制信号也就越小,从而保证了系统稳定性和精度。
伺服电机通常应用于需要精准定位、追踪或调整位置的场合,如数控机床、印刷设备、机器人、医疗装置、半导体设备等。在这些应用中,对于伺服电机的精度和可靠性要求非常高,所以伺服电机通常选用特殊材料和设计保证长时间稳定运行。例如,定子铁芯常常采用硅钢片制成,以减少铁损,降低磁化和旋转损耗。同时,还采用高强度的永磁材料制造转子,提高输出能力和效率。
总之,伺服电机是一种高精度、可编程的电动机。它的工作原理是通过反馈装置采集反馈信号和目标信号之间的差异,计算并输出相应的控制信号,实现精准的力矩、转速和位置调整。由于其出色的性能和精度,伺服电机在需要高精度控制和调整的应用场合广泛应用。
交流电机和伺服电机的优缺点
交流电机和伺服电机是两种不同的电机类型,它们各自具有一些优点和一些缺点。
交流电机的优点:
1. 高效率:交流电机通常具有高效率,在大多数工业和民用应用中表现出色。
2. 简单:交流电机通常非常简单,易于维护和操作。
3. 成本低:交流电机通常的制造成本比较低,价格也相对便宜。
交流电机的缺点:
1. 转速不可调节:交流电机的转速通常是固定的,不能很好地适应各种应用场景。
2. 精度低:交流电机在某些高精度应用场景中可能无法满足高要求。
3. 不稳定:由于交流电机运行的稳定性不如伺服电机,所以在一些特定的应用场景中可能无法胜任。
伺服电机的优点:
1. 高精度:伺服电机具有非常高的精度,可以实现微小的运动和定位,可以满足精度要求高的场景。
2. 可编程:伺服电机的控制系统可以以编程的方式进行定制,可以根据需求实现不同的运动轨迹。
3. 高效性:伺服电机的效率高,功率密度高,同时能够在高负载下保持稳定的转速。
伺服电机的缺点:
1. 价格较高:相比于普通交流电机或直流电机,伺服电机的价格通常较高,这使得其在某些场景下可能不是最优的选择。
2. 控制技术要求高:伺服电机需要配合高精度、高速度的运动控制技术,这对于控制系统的设计和实现都提出了更高的要求,工程师需要具备更高的技术水平和专业知识。
3. 维护难度较大:伺服电机通常比较复杂,需要经常进行故障排查和维护,而这些工作通常需要更高水平的技术和更加精细的操作。
4. 需要精确匹配:伺服电机的控制器需要与电机进行精确匹配,而不同品牌、不同型号的伺服电机可能不相容,使得其在不同场景下的应用受到限制。
5. 对供电质量要求较高:伺服电机需要稳定的电源和电压,电源波动或电压不稳定都会影响其性能和运行稳定性。
综上所述,虽然伺服电机具有高精度、高响应等优点,但也存在一些限制和缺点,需要在实践中进行综合考虑和选择。
交流电机和伺服电机的控制方式
交流电机和伺服电机的控制方式有以下几种:
1. 手动调速控制:通过手动调节电机的电压、电流或频率等参数,以实现电机的转速控制。手动调速控制通常操作简单,但控制精度、响应速度和稳定性较差。
2. 开环控制:开环控制也称为基本控制,通过计算机、单片机等控制器发送电机控制信号,控制电机的转速、转矩等参数。开环控制通常需要在电机和负载之间设置速度、位置、压力等传感器,以反馈电机和负载的状态信息,提高控制精度和响应速度。
3. 闭环控制:闭环控制结合了开环控制和反馈控制的优点,使用位置发送器或编码器等传感器,测量实际位置或转速,反馈给控制器进行控制,以实现更加精确的控制效果。闭环控制通常需要内置比例、积分、微分(PID)控制器,进行控制参数的优化和整定。
4. 异步伺服控制:异步伺服控制是一种基于开环控制和闭环控制的控制方式,通常使用交流异步电机作为驱动器。异步伺服控制通过控制电机的转速、磁场和转矩等参数,通过一系列控制算法实现高性能的控制效果。
5. 交流伺服控制:交流伺服控制更为普遍地使用于伺服电机,通常使用永磁同步电机作为驱动器。它采用闭环控制方式,将电机的定位准确性和动态性能提高到极致,具有高效率、高精度、高速度、低噪音等特点。
总的来说,交流电机和伺服电机的控制方式包括手动调速、开环控制、闭环控制、异步伺服控制和交流伺服控制等多种,应选取适合的控制方式,以满足电机的性能需求。
交流电机和伺服电机的接线方法
交流电机和伺服电机的接线方法有所不同,具体如下:
1. 交流电机的接线方法:
交流电机通常有三根电源线和三根电机线。电源线包括A相、B相、C相,电机线包括U相、V相、W相。在接线中,将三根电源线分别接到变频器或断路器的U、V、W端子上,将电机的U、V、W相分别接到电机的U、V、W端子上。
2. 伺服电机的接线方法:
伺服电机通常有五根电源线,分别是三相电源线和两根编码器反馈线。电源线包括A相、B相、C相,编码器反馈线分别是A相和B相。在接线中,将三根电源线分别接到伺服驱动器的相线端子上,将编码器反馈线接到伺服驱动器的编码器输出端子上。
总之,交流电机和伺服电机的接线方法有所不同,交流电机只需要考虑三相电源和三相负载的连接,而伺服电机需要考虑电源、电机和编码器等多个部分的连接,要特别注意接线的正确性和质量。
交流电机和伺服电机的使用方法
交流电机和伺服电机是两种不同类型的电动机,使用方法也略有不同。下面是它们的常见使用方法:
1. 交流电机的使用方法:交流电机通常通过交流电源供电,并且控制方式相对简单,通常使用电阻、电容、感抗等元器件进行控制。使用时需要注意交流电源的额定电压和频率,以及电机的额定电流和功率。在使用大型交流电机时,还需要注意是否需要使用起动器和保护装置等设备。对于交流电机的维护保养,需要定期清理电机外表面的尘土,检查电机内部的绝缘状态和轴承润滑状态等。
2. 伺服电机的使用方法:伺服电机的控制方式更加复杂,需要使用专门的控制器进行编程和调试。使用时需要将编码器或传感器连接到控制器的反馈通道中,通过程序语言指定目标位置、速度和加速度等参数,实现对伺服电机的精细控制。在使用伺服电机时,需要保证电机和控制器的相互匹配和兼容性,同时需要考虑安装、接线和调试等问题。在伺服电机的维护保养中,需要定期清理电机表面和内部的尘土和油渍,检查编码器或传感器的工作状态,以及检查控制器的编程文件和参数设定等。
总之,交流电机和伺服电机都是电动机的一种,使用方法有所不同。交流电机通常使用简单,但是无法精细调节,适用于一些基础的动力装置;伺服电机使用稍有复杂,但是可以根据需要实现非常高的精度和控制要求,适用于需要高精度位置控制的设备。对于两种类型的电机的维护保养,需要进行定期检查和清理,保证设备长时间平稳运行。










 工商网监
工商网监
评论