导读:本期文章主要是介绍电压型磁链观测器和电流型磁链观测器。两种磁链观测器运用到异步电机矢量控制中,外环磁链环用磁链观测器形成闭环,分析电压型和电流型磁链观测器的观测性能。
2022-09-06 10:35:37 3214
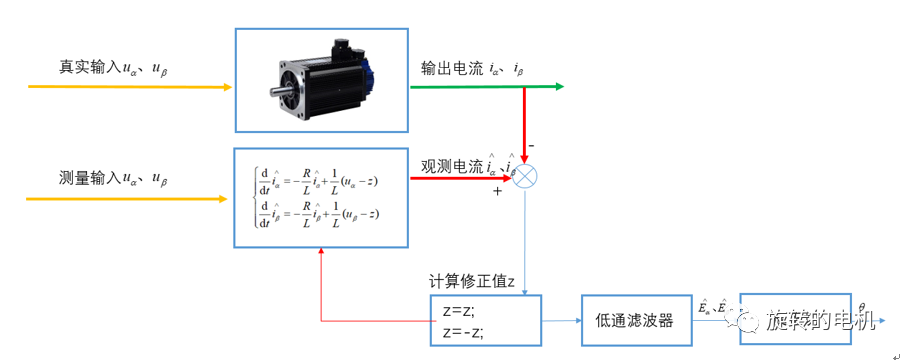
3214 本章节采用滑膜观测器SMO进行永磁同步电机的无感控制,首先介绍了状态观测器的原理,然后分析了滑膜观测器的原理设计了传统低阶滑膜观测器,并针对传统滑膜观测器存在“抖振”的问题,对建立的传统滑膜观测器
2023-05-24 11:36:492890 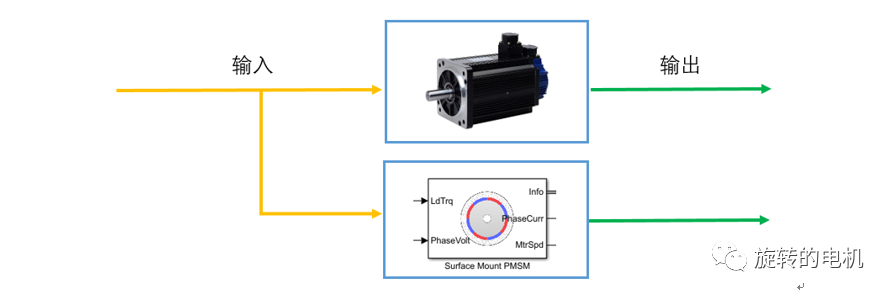
相电流检测及重构(单电阻、双电阻及三电阻采样)6.转子位置及速度提取(滑膜观测器、低通滤波器、锁相环)7.PMSM无感控制的启动计划写完上述内容后再开始写一些别的控制
2025-04-15 19:33:083165 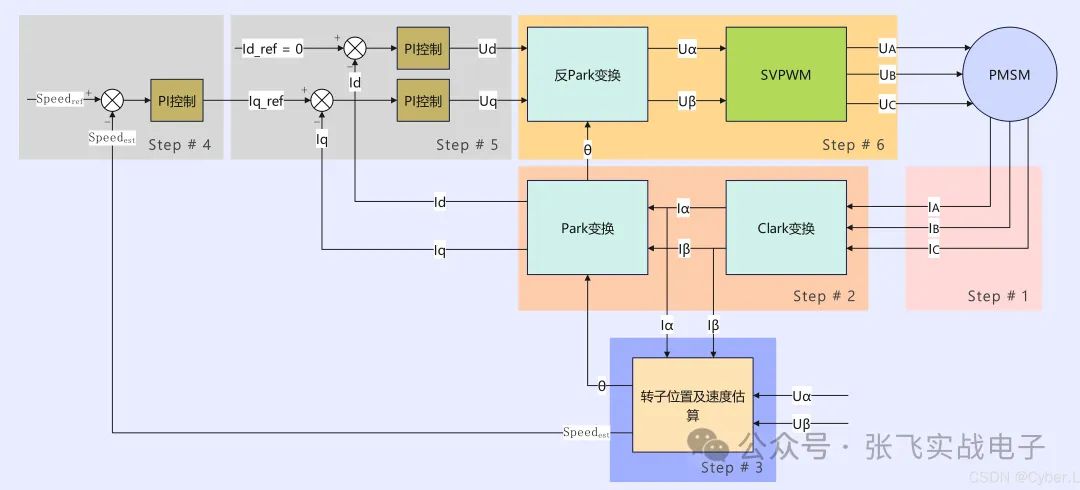
本文小结一下,电机无位置控制中的一种--滑模观测器的设计,还有自适应观测器的设计等其他内容,等有时间之后再来总结。现代永磁同步电机控制原理及MATLAB仿真永磁同步电机无位置传感器控制系统的研究
2021-08-30 06:33:08
一道难题需要解答。请帮忙在18号完成,越快越好。希望能给出简单辅导。谢谢!涉及内容包括matlab simulink知识点涉及 lqr控制 全状态回授,状态观测器联系电话(微信同号):***
2023-04-16 10:11:06
摘要: 基于Matlab/Simulink,本文设计了一个无刷直流电机的控制方案,详细阐述了无刷直流电机的运行原理,并用Matlab/Simulink对其进行了仿真。实验证明,用Matlab
2021-07-05 07:22:46
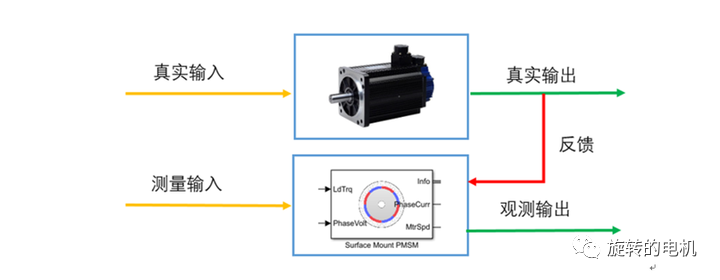
英里外的苏联潜艇位置,这是一个了不起的位置观测器。在无感FOC,正是通过观测含有转子位置信息的电机反电动势,设计转子位置和速度观测器,观测器可以直接采用控制器的所有研究成果,控制器上的稳定性、带宽等
2022-10-12 15:23:20
附件免费获取完整资料~~~
*附件:无刷直流电机滑模观测器参数优化设计方法.pdf
【免责声明】本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,删除内容,谢谢!
2025-06-27 16:48:14
摘要:分析了非理想反电势下无刷直流电机传统脉宽调制电流控制产生电磁转矩脉动的原因。为便于计算机控制,采用离散滑模观测器获取无刷直流电机反电势,进而完成电磁转矩的估算,并证明了离散滑模观测器的到达条件
2025-07-07 18:20:26
推荐课程:张飞软硬开源:基于STM32的BLDC直流无刷电机驱动器(视频+硬件)http://url.elecfans.com/u/73ad899cfd大家好,小弟在做滑膜控制时,发现在电机空载时角度能够观测正确,但是带重载后发现角度误差就比较大了,多达180度。请问大家可能是哪里出了问题。
2019-06-04 17:41:51
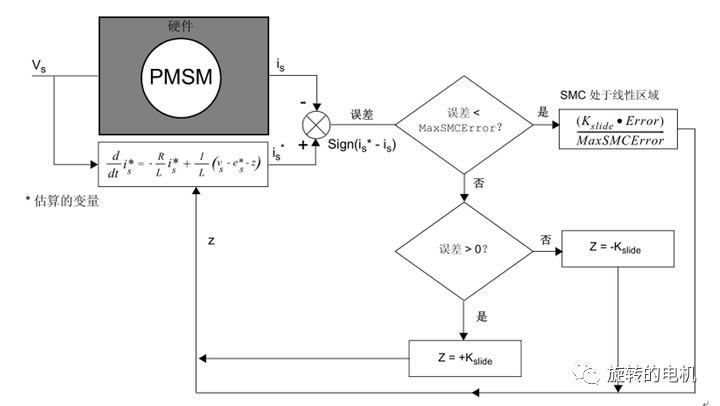
AN1078构造的滑模观测器中用了es*和z,es*是z经过低通滤波后的结果,我看很多地方就直接利用es*(vs-es*)。由于es*是z经过低通滤波后的结果,所以感觉AN1078将估算的反电势减了
2016-08-21 15:44:47
pmsm无感ekf永磁同步电机无感foc控制,采用ekf观测器。带原理图,代码纯手写,方便移植。用于学习,用于学习。
2021-08-27 06:28:10
…………………………………………………………………………… 113第2部分 进阶篇第5章 基于基波数学模型的三相永磁同步电机无传感器控制………………… 1175.1 传统滑模观测器算法……………………………………………………… 1175.1.1
2019-12-03 14:59:13
、理论与现实的差异2.2 、仿真验证而已2.3 、误差校正3、转子位置观测器3.1、搭建一个真正的观测器3.2、看看效果引言上一篇文章中提到了使用滑膜观测器通过估计反电动势实现转子位置解算,本质上
2021-06-29 07:10:38
的问题,该文提出一种基于滑模观测器的电流偏差解耦控制方法。通过计算偏差解耦控制电流的耦合项,发现相对于传统电压前馈解耦,偏差解耦的耦合项简单且易于控制,解决了传统电压前馈解耦控制解耦效果不理想的问题。通过电流滑模观测器的跟踪特性,将定子电流的估计值作为状态变量,反馈到系统输入端,...
2021-08-27 06:41:40
模式和发电模式下对闭环电压电流模型磁链观测器和滑模磁链观测器参数敏感性进行了研究,通过仿真和实验比较了这两种观测器对定、转子电阻及励磁电感的敏感性。同时还研究了基于这两种观测器的模型参考自适应系统
2025-06-09 16:16:52
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档永磁同步电机的无感控制(一)——— 传统的滑模观测器前言1、传统滑模观测器的设计2、传统滑模观测器的仿真2.1传统滑模观测器的仿真搭建
2021-08-27 08:07:21
滑模观测器SMO例程中定义的数据结构有下面两个参数v.Fsmopos和v.Gsmopos:#define SMO_CONST_MACRO(v) \ \ v.Fsmopos = exp((-v.Rs
2020-07-18 14:06:03
策略能够满足交流永磁同步电机高精度控制的要求。
纯分享帖,需要者可点击附件免费获取完整资料~~~*附件:利用扩张状态观测器的交流永磁同步电机控制.pdf【免责声明】本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,删除内容!
2025-06-09 16:11:47
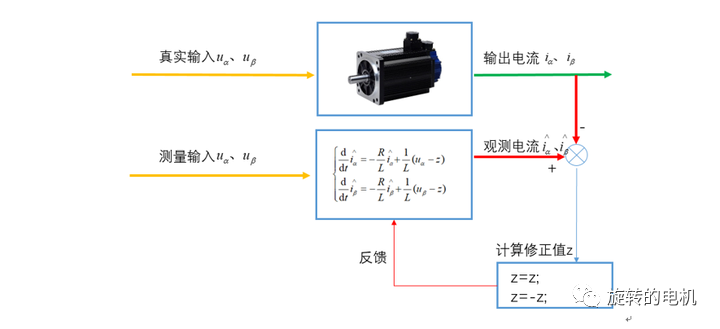
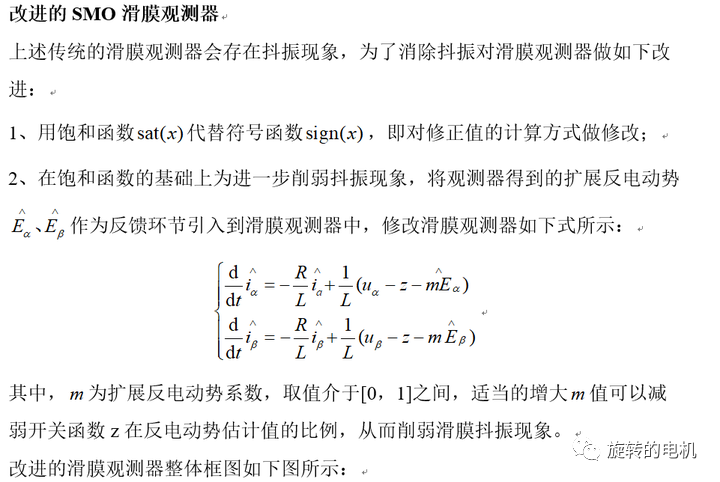
对于观测器的设计,一般会选取一个数学模型进行参照。而对于PMSM而言,一般会根据电机的电压模型或者电流模型来设计观测器。由于电机的负载状态会影响扩展反电动势的大小,而电机在高速重载的情况下,定子电流将会有较大的变化。因此,对于估算扩展反电动势的滑模观测器,按照PMSM的电流模型来设计会更合理。
2021-08-27 06:52:55
,建立了 PMSM 基于改进滑模观测器的无位置传感器控制系统的数学模型。同时应用 Simulink 仿真试验平台,验证了 PMSM 基于改进滑模观测器无位置传感器控制的可行性。
纯分享帖,点击下方附件
2025-08-06 14:38:12
直播内容:
针对无感FOC位置观测器如下亮点:
1.无速度闭环启动
重载或者额定负载启动
启动平滑无抖动
可高速运行3000hz也能正常工作
耐电机高低温(-35度-130度)电机正常工作
低速
2023-06-14 11:36:04
推荐课程:张飞软硬开源:基于STM32的BLDC直流无刷电机驱动器(视频+硬件)http://url.elecfans.com/u/73ad899cfd如图,异步电机无速度传感器控制中,观测器在观测磁链时需要用到转速信息,而在速度估计时有需要用到磁链的信息,这样不矛盾吗?
2019-05-21 09:48:53
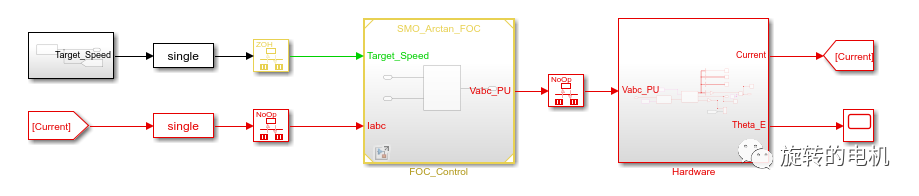
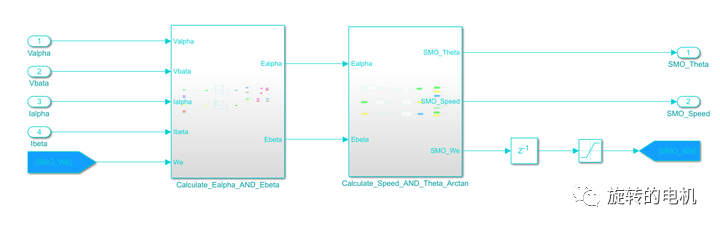
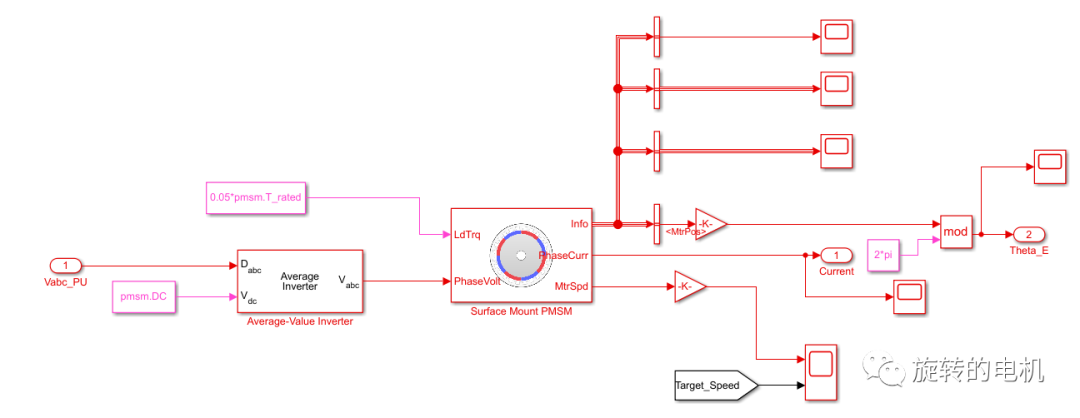
(无.lib文件)。本次直播,主讲无感FOC框架.MATLAB,SIMULINK从0搭建一个FOC框架,并代码生成。无感观测器算法原理及代码生成。
这是搭建的MATLAB模型,可以仿真电机参数和算法
2023-05-26 14:00:49
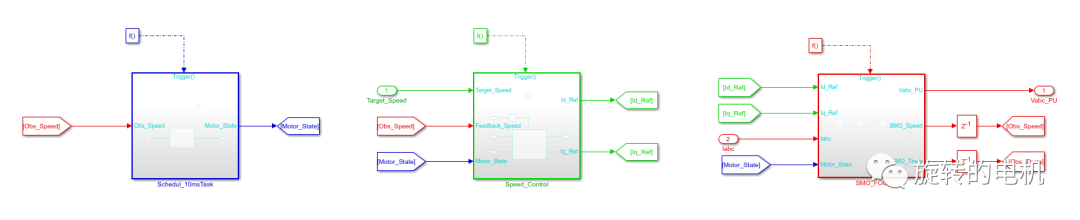
FOC框架基本完成,那么往下我们讲无感观测器
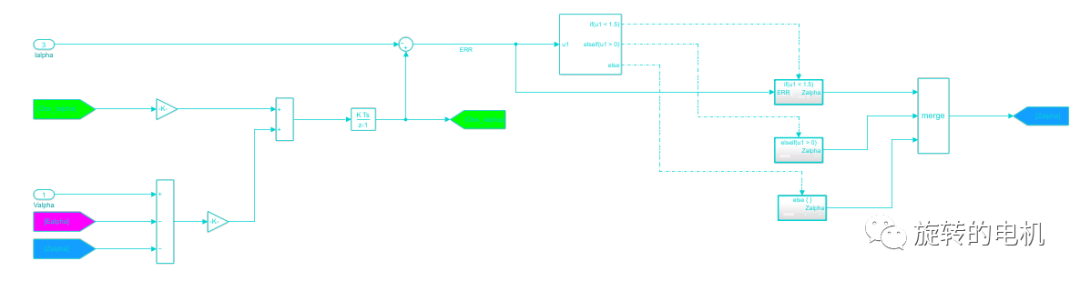
无感观测器是基于电流积分误差估算的PLL位置锁相观测器:该观测器优点:重载启动,耐高低温,表贴凸极一样好用。我们来看看观测器公式:
通过引入Kd,Kq来消除
2023-05-29 10:11:10
FOC框架基本完成,那么往下我们讲无感观测器
无感观测器是基于电流积分误差估算的PLL位置锁相观测器:该观测器优点:重载启动,耐高低温,表贴凸极一样好用。我们来看看观测器公式:
通过引入Kd,Kq来消除
2023-05-28 12:33:39
FOC框架基本完成,那么往下我们讲无感观测器
无感观测器是基于电流积分误差估算的PLL位置锁相观测器:该观测器优点:重载启动,耐高低温,表贴凸极一样好用。我们来看看观测器公式:
通过引入Kd,Kq来消除
2023-05-29 10:12:34
最好是基于滑模观测器,其他可以商量
2020-11-28 21:18:29
有偿求 基于滑膜观测器的永磁同步电机无位置传感器研究的例程
2019-06-12 14:48:32
高频注入永磁同步电机无感控制,采用高频注入启动,高速采用磁链观测器,包含电阻、电感、磁链参数辩识。算法全部手写,方便移植到其他平台。用于学习,用于学习。
2021-08-27 07:16:52
永磁同步电机无感foc位置估算源码无刷直流电机无感foc源码,无感foc算法源码速度位置估算部分代码所使用变量全部使用国际标准单位,使用不到60行代码实现完整的位置速度观测器。提供完整的观测器文档
2021-07-05 06:50:37
永磁同步电机无感代码,使用的滑膜观测器和锁相环
2021-08-27 07:48:38
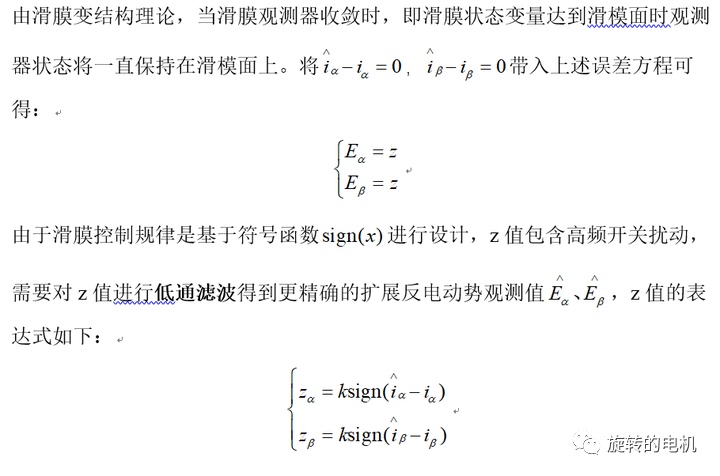
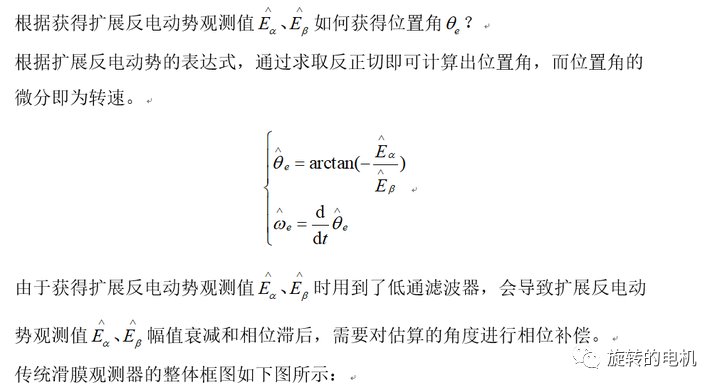
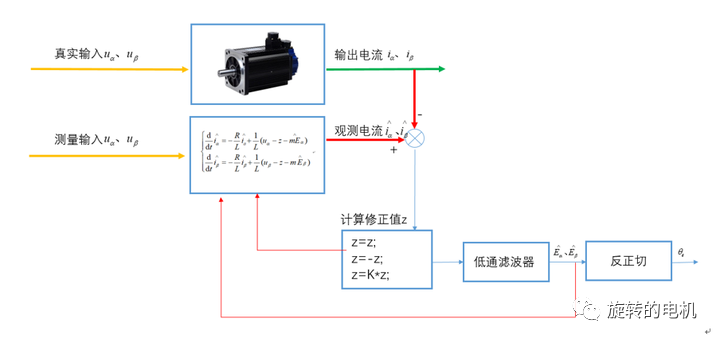
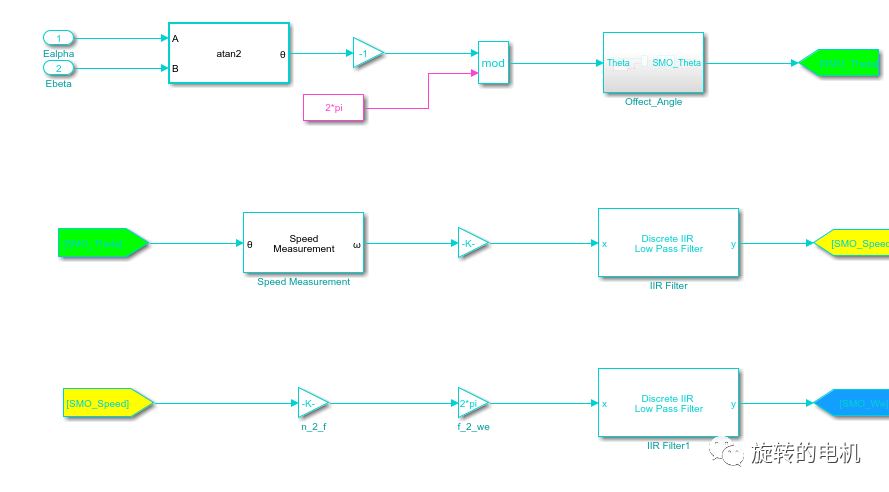
上一篇文章,写到了滑模观测器的设计过程,此过程过后可以得到滑模输出的扩展反电动势。按照反正切函数的原理,只需要对扩展反电动势进行求解反正切即可。如下所示:但是事实上,直接通过滑模观测器输出的扩展
2021-07-13 08:40:34
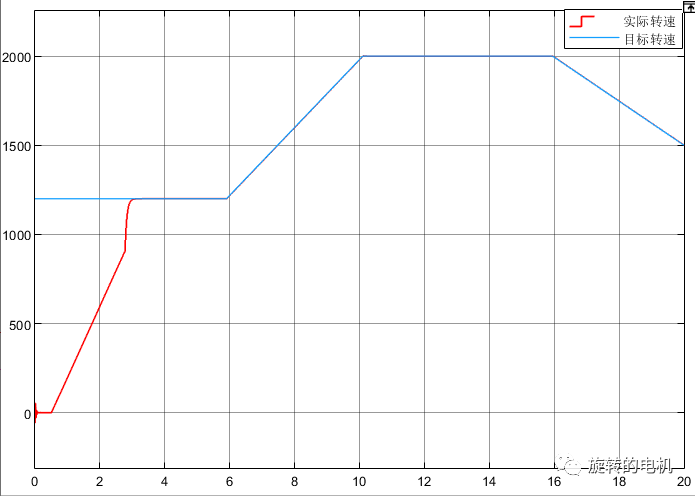
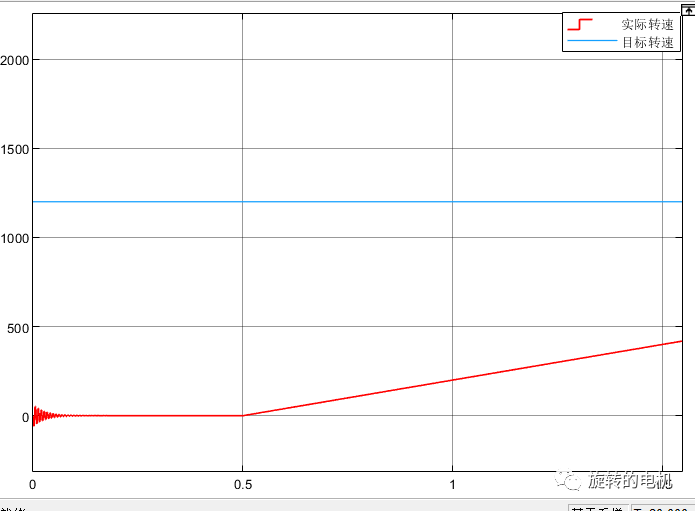
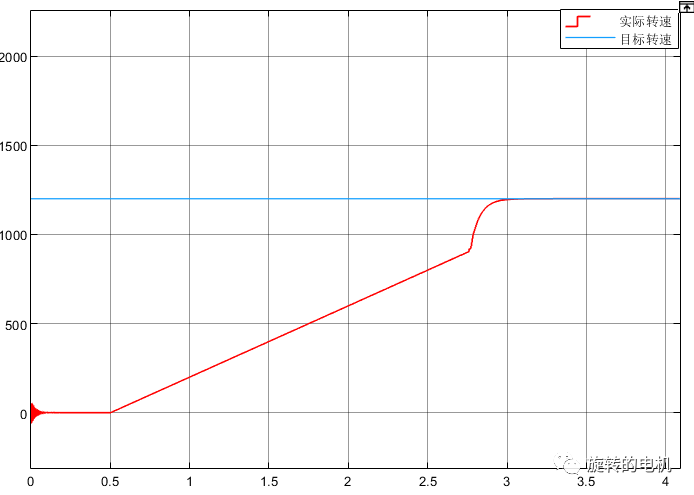
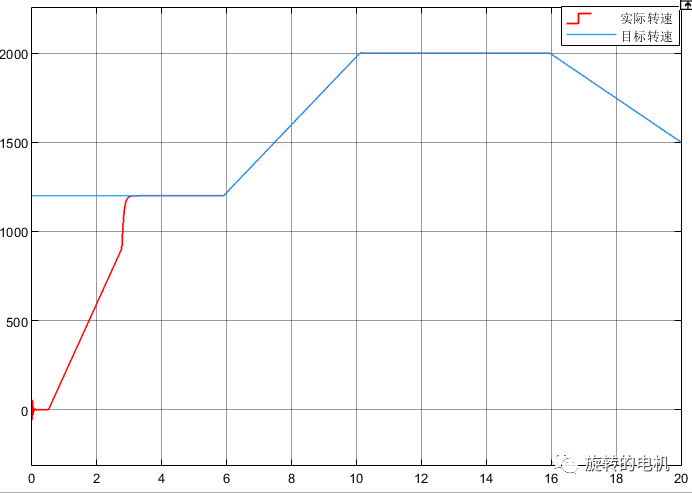
1、滑模仿真框图2、仿真结果波形的简要分析1、转速响应曲线 下图为滑模无位置控制的转速响应,其中蓝色为估计转速,内部被遮盖的为实际转速,可以从图中看出,估计转速和实际转速基本重合,验证了滑模观测器
2021-08-27 06:47:54
和双矢量或者可以成为三矢量的有限集预测控制)和无差拍预测控制,模型预测控制可以是单环模型预测控制和双环模型预测控制,(基于龙伯格负载观测器)(foc控制)转矩,本人自己做的,有不懂的也可以交流一下,+v:lang1578382118,数字是企鹅,有需要的可以来找我...
2021-07-05 07:18:55
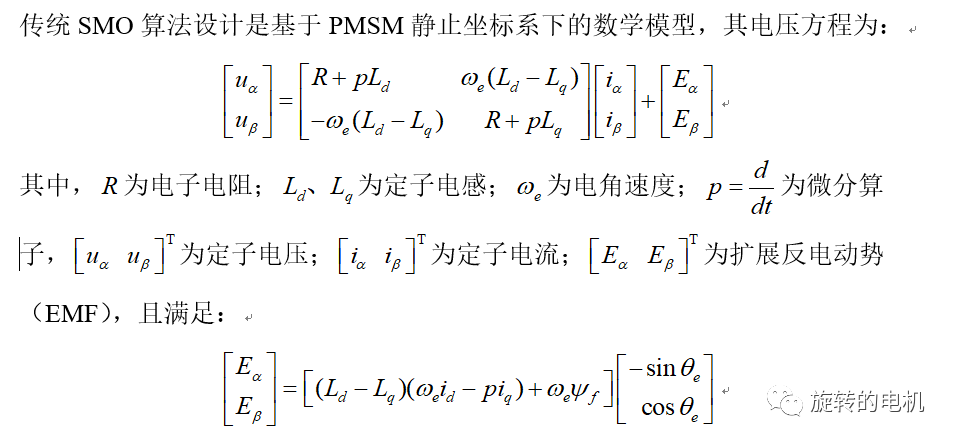
一.内容开始进行无霍尔的学习,首先根据原理及仿真,初步了解实现方法。二.知识点1.传统滑模观测器设计电机电压方程:扩展反电动势:由式2可以得知,扩展反电动势的大小和电机的转速、定子电流id和定子电流
2021-07-09 06:25:15
在网上找了找没有找到,哪位大神有PMSM的滑模观测器的例程程序,邮箱留下:hykxqq@163.com
2018-10-12 14:50:45
无感Foc电机控制算法采用滑膜观测器,启动采用Vf,全开源c代码,全开源,启动顺滑,很有参考价值。带原理图,笔记仅仅展示一部分,都是我自己做的,版权所有。
2021-08-27 07:34:20
现在课题需要,要做一个四阶系统的状态观测器设计,基于matlab设计,四种(全维观测器 降维观测器 自适应观测器 滑模观测器),并且在matlab里仿真后对其性能进行比较(稳态精度,动态响应速度
2013-04-16 10:13:13
基于滑模观测器的永磁同步电机SPMSM无位置传感器仿真
2021-08-27 07:24:21
开源程序、基于查询表的弱磁控制、基于最大转矩电流比MTPA及电压反馈的弱磁控制、直接转矩控制DTC、自抗扰控制ADRC、基于高频注入、卡尔曼滤波、模型参考自适应MRAS、滑模观测器SMO的无速度传感器
2019-07-29 15:41:00
无感 BLDC 的FOC控制中观测器G1和G2参数如何确定?
2024-04-19 06:48:10
有滑膜控制的仿真么?
2018-11-25 14:19:20
负载转矩观测器的设计与仿真实现假定负载转矩在永磁同步电机控制系统中被认作外部负载扰动,负载是不可测的,但是可观的。从而,依据PMSM数学模型(1)中进行负载转矩观测器的设计,具体如下:1.1负载转矩
2021-09-15 07:56:33
系统设计:状态观测器的设计及其响应3.0 实验设备PC 计算机1 台(要求P4-1.8G 以上)、MATLAB6.X 软件1 套。3.1 实验目的①学习状态观测器的设计方法。②
2009-05-15 00:03:29 28
28 讨论了无刷直流电机无位置传感器控制 提出一种基于扰动观测器的无位置传感器控制方案。无刷直流电机电势平衡方程的非线性由反电势所引起 如果假设反电势为常值扰动 就
2009-07-10 15:49:0466 针对一类带有数值界不确定性的状态观测器系统,设计了使其保持闭环系统鲁棒稳定的反馈控制律,对传感器故障具有完整性,并且控制器的选取仅依赖于一组LMI. 由于Matlab 中有关于LMI
2009-07-13 12:00:4416 对矢量控制系统动态结构进行了研究, 应用状态估计与状态观测器理论, 提出了新型磁通观测器结构和速度推算方法, 对控制系统进行建模, 并用仿真实验证明所提方案的磁通观测器
2009-07-17 08:22:0126 介绍了用于异步电动机无速度传感器的磁场定向控制的一种自适应滑动模式观测器。
2009-07-18 10:58:3018 本文提供了一种基于滑模观测器的永磁同步电机矢量控制系统的实施方案。设计一滑模观测器,对永磁同步电机的转子位置角和转速进行实时在线估算,实现电机的闭环调速运行。
2009-08-10 15:23:4640 针对传统开关切换函数滑模观测器存在高频抖振的问题,本文在仔细研究卡尔曼滤波器优点的基础之上,将饱和函数引入到滑模观测中,取消了一阶低通滤波器,构造了一种新型的
2009-10-16 09:00:0138 基于MATLAB的无速度传感器矢量控制仿真:设计了参数自调整模糊控制代替常规的PI调节器,构建无速度传感器异步机矢量控制系统,并运用Matlab\Simulink工具构造异步电动机的矢量
2009-11-18 11:15:4751 介绍一种无位置、速度传感器的交流伺服系统的设计方法,它采用自适应滑模观测器来估算转子的位置及速度。理论分析表明,滑模自适应观测器对测量噪声有较强的鲁棒性,且能
2009-12-16 15:21:5827 基于MatLab/Simulink的GPS系统仿真:快速可靠的GPS (全球定位系统)系统仿真可对双频GPS 接收机的设计、接收算法的研究提供有效的帮助。文中详细介绍了在MatLab/Simulink 环境下GPS 系统仿
2010-02-08 14:55:27112 电路实验与Matlab/Simulink仿真:摘要:在探索和研究电路实验的改革创新过程中,分析电路实验存在的不足,对电路实验提出改进的措施.提出采用工程软件Matlab/Simulink进行电路仿真
2010-04-14 08:26:59169 讨论直接转矩控制方法在永磁同步电机中的应用问题,利用MATLAB仿真工具对永磁同步电机直接转矩控制系统仿真。针对直接转矩控制低速时存在较大转矩脉动的问题,采用观测器方
2010-12-28 10:40:2616 基于Matlab/Simulink的无刷直流电机控制仿真研究基于Matlab/Simulink的无刷直流电机控制仿真研究基于Matlab/Simulink的无刷直流电机控制仿真研究基于Matlab/Simulink的无刷直流电机控制仿真研究
2015-12-29 10:32:500 采用滑模观测器的交流永磁直线伺服电机无传感器控制
2016-04-25 09:51:2121 《Matlab Simulink与控制系统仿真》,感兴趣的小伙伴们可以看看。
2016-08-09 17:33:1382 基于扩张状态观测器的永磁无刷直流电机滑模变结构控制_夏长亮
2016-12-15 18:02:434 基于自适应滑模观测器的永磁同步电机无位置传感器控制_陈炜
2017-01-05 15:34:1422 带扰动观测器的网侧逆变器高阶终端滑模控制_吴忠强
2017-01-07 16:52:061 基于卡尔曼滤波滑模变结构转子位置观测器的PMSM无差拍控制_邱忠才
2017-01-07 17:01:106 基于反电动势滑模观测器的异步电机矢量控制_杨淑英
2017-01-07 18:21:318 基于干扰观测器的飞行仿真转台完全跟踪控制_陈松林
2017-01-08 11:20:200 永磁同步电机旋转坐标系滑模观测器设计研究_刘彦呈
2017-01-08 12:03:289 基于终端滑模负载观测器的永磁同步电机位置系统反步控制_方一鸣
2017-01-08 13:49:172 基于MATLAB-Simulink的BLDC直接转矩控制系统仿真-李晓竹
2017-01-21 12:00:2923 代替常用的电压一电流模型的方法,结合直接转矩控制、空间矢量脉宽调剂技术以及船桨模型,建立基于PI-PLL磁链观测器的SVM-DTC系统仿真模型,仿真结果表明,定子磁链观测的精度大幅提高,系统的性能有所改善。
2017-11-08 11:18:4918 针对位置传感器的引入使得开关磁阻电机(SRM)结构变得复杂,可靠性降低这一问题,将RBF神经网络和终端滑模控制(TSMC)相结合建立了自适应神经终端滑模观测器,用RBF神经网络逼近观测器的控制输入
2018-01-29 13:46:3514 络拓扑为有向图且在切换拓扑图的情况下给出基于观测器的自适应控制协议。利用Lyapunov稳定性理论和矩阵理论分析,得到使系统实现一致性的充分条件。仿真结果表明,在局部观测器和控制协议及自适应控制下,跟随者可以跟踪到
2018-02-08 16:54:360 对传感器集成浮球的正弦定深控制和爬坡定深控制进行了M atlab仿真分析,以深度偏差平方作为评判标准,分析了常规PID和干扰观测器PID的控制效果。研究结果表明,与常规PID定深控制相比,基于干扰观测器的PID可以观测和抑制外界干扰对系统
2018-03-26 10:18:370 和液压位置伺服系统模型,用MATLAB/Simulink建立了基于积分分离的PI反馈控制系统模型,最终构建了轧机压下系统联合仿真模型。在Simulink平台设计了干扰观测器抑制噪声方法,通过联合仿真分析,有效抑制了外部干扰噪声造成的不稳定性,提高了控制精度。联合仿
2018-03-29 10:20:415 基于扰动观测器的无刷直流电机无位置传感器控制实验资料下载
2018-05-21 11:31:0012 赋予旧的电机新的技巧4.5:交流感应电机FOC,IPM的操作,每安培的最大转矩控制IPM电机,无传感器FOC和观测器
2018-08-21 01:34:0011709 SIMUUNK是MATLAB提供用来对动态系统进行建模、仿真、分析的软件包。SIMULINK包含许多模块库,利用这些模块库可以很方便的进行复杂系统构建与仿真分析,为研究者提供了一个实用的仿真平台。本文对基于MATLAB/SIMULINK异步电动机的直接转矩控制离散系统仿真模型做出分析和介绍。
2019-10-17 07:57:005889 
针对传统滑模和传统干扰观测器在机械臂关节位置跟踪中存在的控制输入抖振、需要测量加速度项、应用模型受限等问题,提出一种改进非线性干扰观测器的机械臂自适应反演滑模控制算法。首先,设计改进的非线性干扰
2018-12-12 14:43:393 本文档的主要内容详细介绍的是Matlab与系统控制simulink仿真的PPT课件合集免费下载包括了:SIMULINK仿真基础,Matlab及其应用 动态系统仿真——Simulink,测试系统
2019-07-02 08:00:0027 提出一种基于滑模观测器与分数阶锁相环(FO-PLL)的无传感器永磁同步电机(permanent magnet synchronous motor,PMSM)矢量控制算法。首先用滑模观测器估计出反
2020-03-24 16:29:0833 ,可以相应地减弱抖振。在MATLAB/ Simulink 平台进行建模仿真,仿真结果证明,该优化方法降低了传统滑模观测器转子角度检测滞后的情况并有效削弱抖振,转子角度误差变小,缩短扰动之后稳定跟踪转速所需时间,提升了电机性能。
2020-10-15 17:58:5826 基于滑模观测器的永磁同步电机控制系统设计
2021-08-24 09:32:2812 自己做的PMSM SMO,性能优越,放心取用
2022-09-05 09:17:573 导读:本期主要介绍异步电机的全阶磁链观测器。从工作原理到带入到矢量控制中,比较不同观测器的估计效果对电机控制性能的影响大小。
2022-11-08 09:34:326606 实际运行状态,但是我的控制对象在电流采样在10Khz仿真波形很差,100khz勉强可以使用。
滑膜控制器给定电压,为2r/2s变化后计算出的电压Uapha,Ubate。在袁雷老师的仿真中,无传感器仿真效果很好,是因为仿真在连续域运行,测量逆变器输出电压,这里的电压每
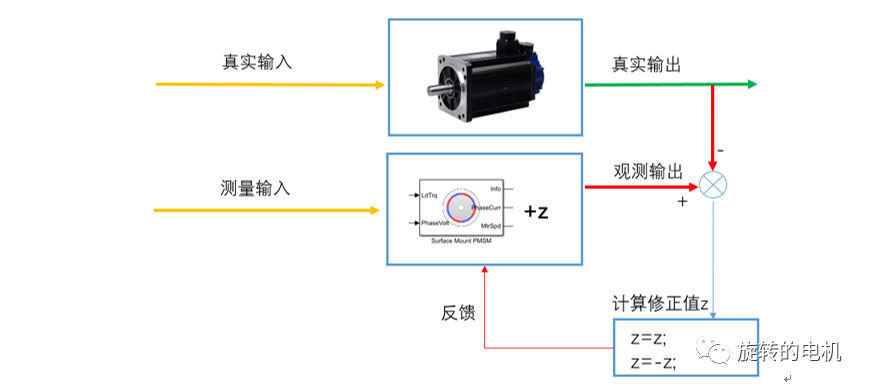
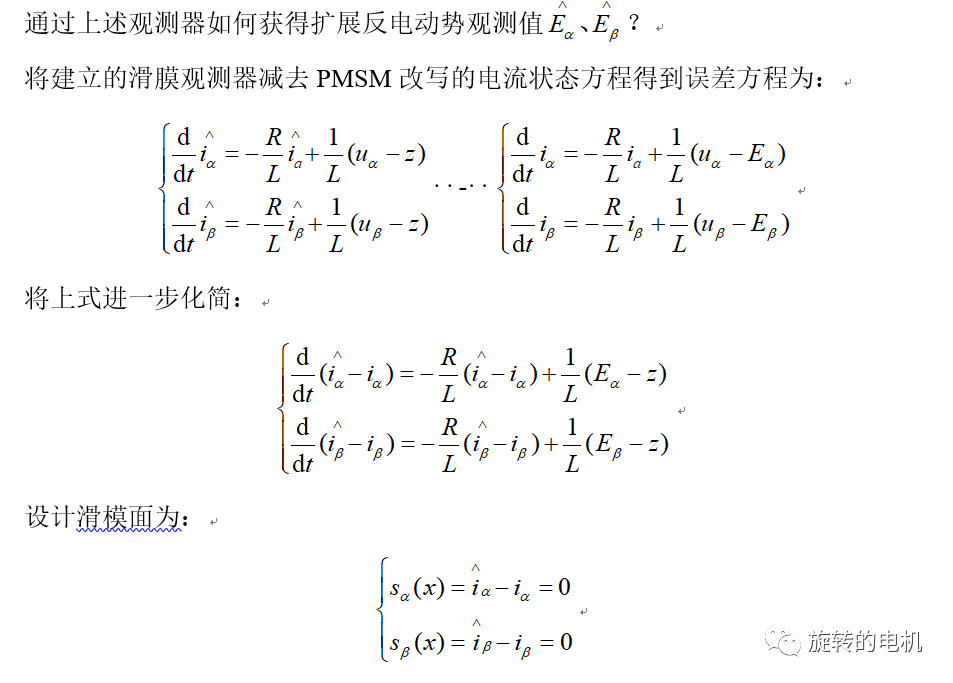
2023-03-15 11:30:482 1、自适应滑模观测器算法 对于表贴式三相PMSM重写静止坐标系下的电流方程为为了设计SMO首先定义滑模面函数为设计自适应SMO为 将两个电流方程相减可得由于系统进人滑模面后,即有所以可得到反电动势
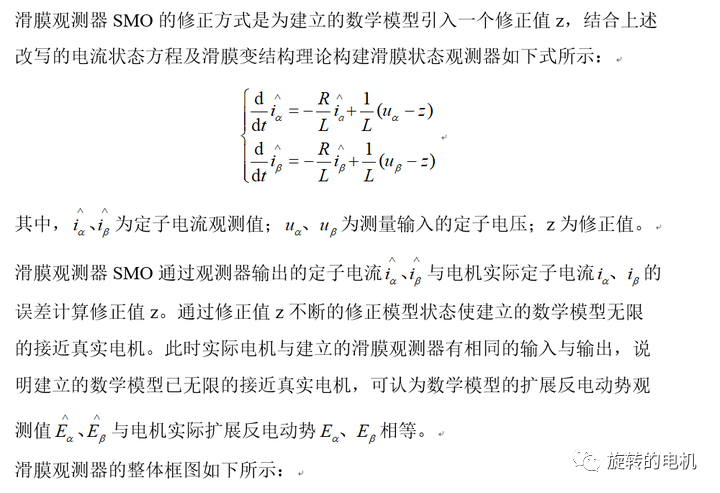
2023-03-15 09:53:201 本博客传统滑模观测器的设计,是在矢量控制策略的基础上,通过运用滑模变结构理论对反电势进行估计,进而提取电机的转子信号和转速信息。 永磁同步电机的无感控制是通过检测电机绕组中的有关
电信号,采用一定
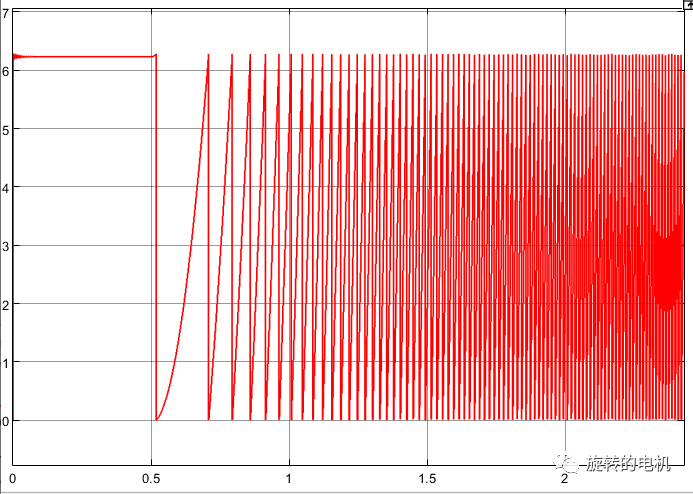
2023-03-15 09:43:463 1、滑模仿真框图 2、仿真结果 波形的简要分析 1、转速响应曲线 下图为滑模无位置控制的转速响应,其中蓝色为估计转速,内部被遮盖的为实际转速,可以从图中看出,估计转速和实际转速基本重合,验证了滑模
2023-03-15 09:38:240 问题 本人在学习无感滑膜控制的时候,对于仿真模型的离散化处理遇到了困难,尤其是在学习到《现代永磁同步电机控制原理及MATLAB仿真》(袁雷编著)的第124页中的如下公式时,百思不得其解。 采用反向差
2023-03-28 10:16:585 本章节采用扩展卡尔曼滤波进行永磁同步电机的无传感器控制,首先分析了扩展卡尔曼滤波的原理,然后基于扩展卡尔曼滤波对PMSM进行状态估计,最后通过Matlab/Simulink对该方案进行仿真分析。
2023-06-08 14:42:578036 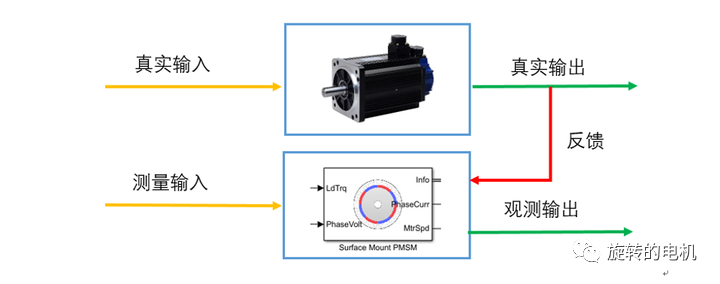
本章节采用龙伯格观测器进行永磁同步电机的无传感器控制,首先分析了龙伯格观测器的原理,然后设计了PMSM的全阶龙伯格观测器,最后通过Matlab/Simulink对该观测器方案进行仿真分析,为了进行
2023-06-08 14:46:037086 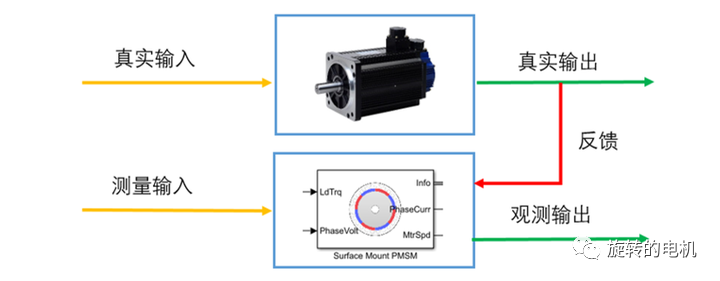
利用滑模观测器实现永磁同步电机的无传感器磁场定向控制
2024-07-13 09:32:334 电子发烧友网站提供《基于滑模观测器和锁相环的无轴承感应电机无速度传感器控制.pdf》资料免费下载
2024-12-19 14:04:240 直播预告扫码购买课程&预约直播直播亮点1、FOC无感控制框图分析2、电机数学模型回顾3、转子位置角求取思路4、滑模观测器思路分享5、滑模观测器的实现直播大纲1、无感FOC控制框图分析2、电机
2025-08-05 08:06:49983 
 电子发烧友App
电子发烧友App













 工商网监
工商网监
评论