在电机的运行中,是由电机定子和转子磁场同步旋转,建立的一个具有同步旋转速度的旋转坐标系,这个旋转坐标系就是常说的D-Q旋转坐标系。在该旋转坐标系上,所有电信号都可以描述为常数。为了方便电机矢量控制
2017-09-22 10:25:07 5018
5018 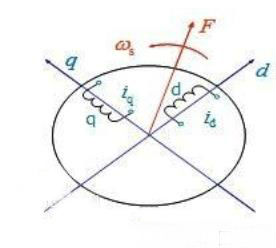
应用矢量控制时其坐标变换是基础,相关文献与资料都有很多,matlab还有自带模块,但是一般都直接就给个变换矩阵让人晦涩难懂。
2023-07-10 15:15:044156 
三相永磁同步电机的矢量控制一 内容三相永磁同步电机CPMSM)是一个强搞合、复杂的非线性系统,为了能够更好地 设计先进的 PMSM 矢量控制算法,建立合适的数学模型就显得尤为重要。本次学习PMSM
2021-08-27 07:02:16
前言磁场定向控制又称矢量控制(FOC), 本质上为控制定子电流的幅度和相位,使之产生的磁场和转子的磁场正交,以产生最大的扭矩.1. PMSM 的磁场定向控制磁场定向控制( Field
2021-09-06 07:45:18
PMSM空间矢量控制中的电流采样怎么实现软件去纹波啊?拜托各位大神
2017-11-28 17:50:59
Pmsm在旋转坐标系的数学模型坐标变换dq轴电压方程整体模型电压计算模块dq轴磁链计算d,q轴电流转距计算转速计算仿真结果因为转动惯量较小,转速迅速跟随同步转速顺利启动。A相电流与电压波形...
2021-08-27 07:56:09
1.坐标变换公式简单推导一下,现有矩阵udq=C x uabc,idq=C x iabc,其中C代表坐标变换公式。(1)假设功率不变P=udqT x idq=uabcT x iabc=CT x C
2021-08-27 07:42:23
分析PWM整流,逆变装置时,经常会用到旋转坐标变换这个分析方法起因是交流侧的量都是时变的交流量,不易控制所以书上可以看到对三相坐标变换有如下的描述将三相对称静止坐标系(a,b,c)转换成以电网基波
2017-10-25 14:04:53
一、坐标变换1.1. 三相静止坐标系(abcabcabc)和两相静止坐标系(α/β\alpha/\betaα/β)之间的变换根据图中所示abcabcabc坐标系和αβ\alpha\betaαβ坐标
2021-08-27 06:18:07
进行傅里叶变换得到的波形图中,怎么把横坐标对应的点数变成频率啊? 求各位大神指导!!!!
2013-07-18 10:15:51
1、简述矢量变换控制调速原理并画出异步电动机矢量变换控制系统图及直接磁场定向矢量变换控制变频调速系统图,并对分析两图中的输入与输出量之间的关系表达式2、简述直接转矩控制原理并画出直接转矩控制
2021-01-11 17:47:31
在矢量控制中abdq变换的时候,如何把电源角频率(ωe)换成角度(θ)呢?
2016-01-22 15:16:36
矢量控制又称磁场导向控制(Field Oriented Control, FOC),这是永磁同步电机(PMSM)的主要控制方法,与BLDC的简单控制策略相比,矢量控制要更为复杂,故需要一套系统的调试
2021-08-27 07:20:39
矢量控制方式——矢量控制,最简单的说,就是将交流电机调速通过一系列等效变换,等效成直流电机的调速特性,就这么简单,至于深入了解,那就得深入了解变频器的数学模型,电机学等学科。矢量控制原理是模仿
2021-06-28 08:26:48
鼠笼机矢量控制算法中的Clark变换,应该是用等功率变换还是用等幅值变换呢?它们的区别是?对算法的影响是?TI bpra048文档中的变换是等幅值变化吧,如下图所示:我的算法是按照这个公式做的;看了下北航出的《电动机的DSP控制》这本书,里面的clark推导是按照等功率做的:
2020-07-17 16:00:42
PSIM做FOC矢量控制时,dq轴转换为abc轴的环节,出现了问题。在Vd=8,Vq=0,Θ=2/3π=2.03时,根据坐标变换的公式计算出来的Vaa,Vbb应该是负值,但是仿真出来确实正值。请大神帮忙解答。
2021-09-15 16:55:47
(PMSM)坐标变换的过程首先将自然坐标系的ABC三相转化为alpha和beta静止坐标系,然后再将静止坐标系转化为dq旋转坐标系,第一步成为Clark变换,第二步则成为Park变换,Clark变换一般有两个
2018-09-16 13:02:18
原理…………………………………………………… 2339.2.2 仿真建模与结果分析………………………………………………… 2349.3 基于VSD坐标变换的六相PMSM 矢量控制
2019-12-03 14:59:13
的解耦,利用两相坐标系,可以解决电机矢量控制问题。图一:三相静止坐标系与两相静止坐标系转换在三相静止坐标系中,为ABC三相电源矢量的矢量和,其在ABC轴上的投影分别为:02park变换推导(两相静止坐标
2021-08-16 13:42:11
其实不管是之前的三相异步电动机的控制还是现在比较火的直流无刷或者永磁同步电动机,要想做到精确控制,都离不开两个家伙,Park变换和Clark变换。也就是我们经常说的矢量变换。通俗的讲就是用来做
2023-03-31 14:38:53
由于前几天比较忙,这期更新有点迟了!!不过没关系,在新的章节会保持每周更新1~2篇博文。0 前言这期我们开始新的章节——永磁同步电机矢量控制(三电平)。记得前两三周我在做三电平的PMSM矢量控制
2021-08-27 07:05:32
无刷直流电机(BLDC)和永磁同步电机(PMSM)的区别在哪?SPWM控制是什么?三相PMSM矢量控制技术包括哪几部分?
2021-07-27 07:10:16
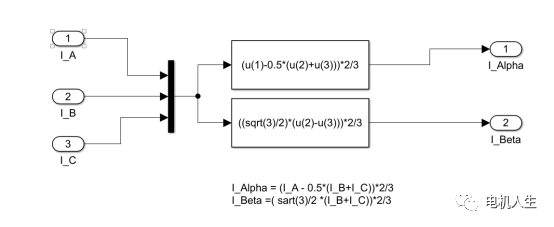
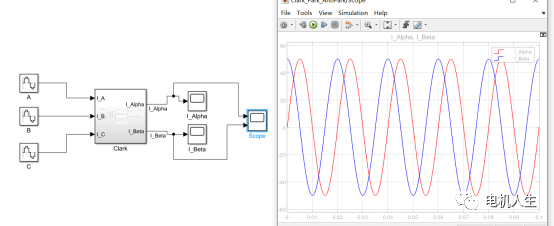
一.内容此次学习主要进行仿真部分的学习。二.知识点1.三相PMSM的坐标变换1.1Clark变换与仿真建模功能:将相位互差的,和转换成正交的和。Clark变换公式:由三相电流之和为0,也可以将公式
2021-08-27 07:58:30
PMSM 的数学模型,PMSM控制算法中采用的坐标变换通常包括静止坐标变换( Clark 变换)和同步旋转坐标变换(
2021-08-27 06:45:51
://url.elecfans.com/u/73ad899cfd1、矢量控制技术的原理矢量控制技术是以坐标变换为基础,通过对定子电流在dq旋转坐标系大小和方向进行控制,达到直轴分量和交轴分量的解耦,进而实现对磁场和转矩的解耦控制
2018-09-19 19:19:33
什么是矢量控制时序?
2022-02-11 06:38:40
目前传统的矢量控制常见的方法有 id=0 控制和最大转矩电流比控制,前者主要适用于标贴式三相PMSM,后者主要用于内嵌式PMSM。但这里说明一下,对于表贴式PMSM,Id=0控制和最大转矩电流比控制
2021-08-27 07:07:21
今天看了一篇关于PMSM矢量控制的论文,是在电流环中引入了前馈补偿,觉得挺有用的,分享一下:首先是pmsm在dq坐标系下的数学模型:将式(2)代入式(1)得到定子电压方程u可见Ud不仅与id有关,也与iq有关,dq轴定子电压之间存在耦合,该耦合从根本上是由于磁场的相互耦合引起的。...
2021-08-27 06:35:47
基于TMS320F28335的电机控制Clark变换的实现在电机控制中,经常用到clark变换,它的基本思想是把三相静止、互差120°的abc坐标系中的变量变化到两相静止、互差90°的αβ坐标系中,从而简化了控制过程。其基本变换的原理为如图1所示:
2013-01-07 13:37:34
PMSM无传感器矢量控制原理PSoC4简介基于PSoC4的无传感器矢量控制方案基于PSoC4的设计实例
2021-02-24 06:12:44
中将三角波与调制波的比较顺序弄反了,三角波大于调制波输出1,小于输出0;给定1500rpm的转速波形:接下来做的事:1.转子磁场定向的矢量控制方法解决了永磁同步电机控制中励磁与转矩电流之...
2021-06-30 06:39:11
在电机仿真过程中,需要采用坐标变换理论把交流电机通过坐标变换理论等效为直流电机进行解耦控制,Park(abctodq0/dq0toabc)变换和Clark(abctoαβ/αβtoabc
2021-09-03 06:24:55
上一阶我们讲了异步电机的四大方程,发现异步电机模型非常复杂,中间各个变量相互耦合,我们希望通过更直接,更简单的方法来分析,这里将引出坐标变换的概念。首先要提出等效的前提,其实就是强调能量守恒:磁势
2021-09-03 09:19:51
变换32.1坐标变换的基本思路32.2三相—两相变换(3/2变换)42.3静止两相-旋转正交变换(2s/2r)53转子磁链计算64矢量控制系统设计74.1按转子磁链定向...
2021-09-03 07:06:48
变换32.1坐标变换的基本思路32.2三相—两相变换(3/2变换)42.3静止两相-旋转正交变换(2s/2r)53转子磁链计算64矢量控制系统设计74.1按转子磁链定向...
2021-09-06 06:29:37
,需要进行调整。三、测试变换程序的正确性。矢量控制的核心其实就在Clark与Park变换上,通过这两个变换实现了直轴与交轴的解耦。如果使用的是官方的库,可以不管本步骤。如果是自己写的,需要通过仿真测试
2019-10-15 14:23:52
【实例简介】永磁同步电机矢量控制matlab仿真 各个环节的源码包括 dq变换 svpwm等【实例截图】【核心代码】│ abc_to_alpha_beta.m│ abc_to_dq.m
2021-08-31 06:14:18
逆变换如下:由于矢量控制能为永磁同步电机带来像直流电机一样的调速性能,而矢量控制又是建立在坐标变换理论下的体系,因此我们有必要讨论一下永磁同步电机在 d,q坐标系下的数学模型。其电路方程如下:转矩方程
2014-01-22 09:46:51
永磁同步电机控制系统是多变量、强耦合的时变非线性系统,要进行高性能控制,获得良好的动态稳态特性,常用的方法是矢量控制。永磁同步电机矢量控制是通过坐标变换的方式将三相电流解耦,以控制其中一项来达到控制
2021-08-27 06:04:51
永磁同步电机的矢量控制原理是什么?永磁同步电机的矢量控制进行坐标变换的原因是什么?
2021-10-14 06:21:27
2.永磁同步电机的矢量控制策略(二)对于正弦波永磁同步电机,所有的矢量控制算法都是建立在电机的数学模型上。因此,有必要结合坐标变换对永磁同步电机的数学模型进行推导,分别为三种不同坐标系下的数学模型
2021-08-27 06:04:18
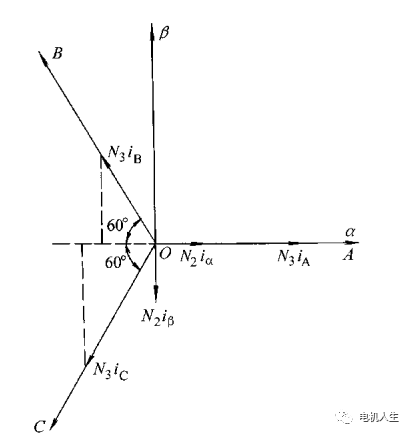
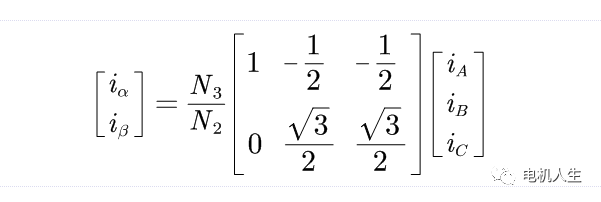
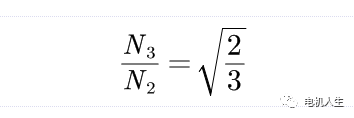
1.CLARK(3/2)变换ABC为三相坐标系, α β为两相正交坐标系。设三相绕组每相有效匝数为N3,两相绕组每相有效匝数为N2,各相磁动势为有效匝数与电流的乘积,其空间矢量位于相关坐标系上。按照
2021-09-06 06:38:53
和稳定性。AC电机的矢量控制:矢量控制算法的核心是两个重要的转换: Clark转换,Park转换和它们的逆运算。采用Clark和Park转换,带来可以控制到转子区域的转子电流。这种做充许一个转子控制
2018-10-26 11:43:01
在电机的运行中,是由电机定子和转子磁场同步旋转,建立的一个具有同步旋转速度的旋转坐标系,这个旋转坐标系就是常说的D-Q旋转坐标系。在该旋转坐标系上,所有电信号都可以描述为常数。为了方便电机矢量控制
2018-10-11 11:14:52
在电机的运行中,是由电机定子和转子磁场同步旋转,建立的一个具有同步旋转速度的旋转坐标系,这个旋转坐标系就是常说的D-Q旋转坐标系。在该旋转坐标系上,所有电信号都可以描述为常数。为了方便电机矢量控制
2023-03-06 17:45:31
参考信号的跟踪效果较好,因此三相交流电会经过坐标变换,在旋转的dq坐标轴上,可以用直流量描述电枢绕组的合成矢量。FOC控制中,有两种坐标转换需要注意的,分别是clark变换,和park变换。clark变换将
2019-10-29 10:27:06
研究了将矩阵变换器的空间矢量脉宽调制与异步电机转子磁场定向矢量控制相结合的组合控制策略,并采用MATLAB对矩阵变换器的输入电压波形、输入电流波形、电机空载启动转矩波形、电机空载启动转速波形以及在
2025-06-04 14:48:00
根据永磁同步发电机(PMSG)天量控制技术的特点,结合矩阵变换器(MC)和电机矢量控制技术的优点。并采用基于空间矢量调制的MC实现对PMSG的天量控制。为有效控制PMSG电磁转矩,采用在PMSG三相
2025-06-04 14:50:35
相信在搞电机控制的小伙伴应该知道目前对永磁同步电机(PMSM)的控制技术主要有磁场定向矢量控制(FOC)和直接转矩控制技术(DTC)。今天主要是想说一说磁场定向矢量控制(FOC)磁场定向矢量控制
2021-08-27 07:38:34
专家,您好:有个事情不懂,想请教您一下。在TI公司提供的2812矢量控制例程pmsm3_1中,为什么CLARKE变换,需要_IQ15toIQ转换呢,多谢!
2018-08-31 09:35:40
本文应用Matlab 下的仿真工具SIMULINK 进行异步电动机矢量控制的仿真研究,通过对异步电动机矢量控制方程式的变换构造出电动机的仿真模型,并通过对异步电动机的电压方程的变
2009-08-12 12:18:52 54
54 本文分析了PMSM 矢量控制中转子磁场初始定位的原理,在此基础上,给出了DSP 的软件实现方法,为正确地将矢量控制理论应用于PMSM 奠定了良好的基础。
2009-08-29 10:48:1410 矩阵变换器-永磁同步电机矢量控制系统的新型电流控制方法:分析了基于电流滞环控制的矩阵变换器-永磁同步电机(MC-PMSM)系统的开关组合状态和存在的缺点:系统侧电流存在较
2009-11-18 10:44:3331 matlab坐标变换
坐标变换
cart2pol 笛卡儿坐标变换为极坐标或圆柱坐标 cart2sph 笛卡儿坐标变换为球坐标
2008-06-18 14:47:502550 在 1971 年德国学者提出的矢量变换控制方法中,正交旋转坐标系的直轴为励磁轴(M)与转子磁场重合,交轴为转矩轴(T),转子磁场的交轴分量为零,电磁转矩的方程得到简化,即在
2011-05-25 15:22:030 鉴于直接转子磁场定向矢量控制系统较为复杂、磁链反馈信号不易获取等缺点,而转差频率矢量控制方法是按转子磁链定向的间接矢量控制系统,不需要进行磁通检测和坐标变换,并具
2011-09-06 21:41:547745 
Park_Clark_变换公式及锁相的推导,需要的自己下载呀!做信号处理!
2015-11-06 17:13:550 基于SVPWM的PMSM矢量控制伺服系统研究。
2016-04-18 10:02:1723 dq坐标变换数学原理
2016-12-20 22:56:4819 浅谈变频器矢量变换控制的基本原理及应用
2017-01-21 11:54:398 基于模糊PID的PMSM矢量控制系统研究_张涛
2017-03-16 08:00:001 矢量控制(FOC)是空间矢量脉宽调制最重要的应用之一。矢量控制,又名磁场定向控制,其特点是通过坐标变换技术把交流电机定子电流分解为转矩和磁通分量,从而实现像直流电机一样的控制电机的输出转矩和磁通。矢量控制广泛应用于永磁同步电动机(PMSM)的控制。
2017-09-15 14:51:026 在电机的运行中,是由电机定子和转子磁场同步旋转,建立的一个具有同步旋转速度的旋转坐标系,这个旋转坐标系就是常说的D-Q旋转坐标系。在该旋转坐标系上,所有电信号都可以描述为常数。为了方便电机矢量控制
2017-11-08 11:15:021 在不伦瑞克工业大学(TU Braunschweig)发表的博士论文中提出三相电机磁场定向控制方法,通过异步电机矢量控制理论来解决交流电机转矩控制问题。矢量控制实现的基本原理是通过测量和控制异步电动机
2017-11-23 19:00:4520879 
基于Matlab-Simulink的永磁同步电机(PMSM)矢量控制仿真
2018-05-05 10:18:4832 矢量控制(FOC)是空间矢量脉宽调制最重要的应用之一。矢量控制,又名磁场定向控制,其特点是通过坐标变换技术把交流电机定子电流分解为转矩和磁通分量,从而实现像直流电机一样的控制电机的输出转矩和磁通。矢量控制广泛应用于永磁同步电动机(PMSM)的控制。
2020-01-16 10:30:002941 AN6303 PMSM矢量控制原理(中文版)
2023-02-27 18:39:470 AN6413 基于MM32SPIN0280的PMSM双电阻采样矢量控制方案(中文版)
2023-03-01 18:44:310 AN6415_基于MM32SPIN0280的PMSM单电阻采样矢量控制方案(中文版)
2023-03-01 18:45:010 以无刷直流电机为例,在矢量控制中,因为需要从转子角度对电机进行控制,所以需要对定子三相电流进行坐标变换,在旋转坐标系下对转矩和磁场进行解耦控制。控制输出需经过坐标反变换,在静止坐标
2023-03-08 14:51:510 三相永磁同步电机的矢量控制学习笔记1 一 内容 三相永磁同步电机CPMSM)是一个强搞合、复杂的非线性系统,为了能够更好地 设计先进的 PMSM 矢量控制算法,建立合适的数学模型就显得尤为重要。本次
2023-03-13 10:26:275 文章目录 1、abc坐标系 2、αβ坐标系 2.1、Clark变换 2.2、αβ坐标系电流图解 3.dq坐标系 3.1、park变换 3.2、dq坐标系电流图解 1、abc坐标系 向永磁同步电机通入
2023-03-13 09:45:201 对于正弦波永磁同步电机,所有的矢量控制算法都是建立在电机的数学模型上。因此,有必要结合坐标变换对永磁同步电机的数学模型进行推导,分别为三种不同坐标系下的数学模型。即:自然坐标系
ABC下的PMSM
2023-03-13 11:08:140 目前传统的矢量控制常见的方法有 id=0 控制和最大转矩电流比控制,前者主要适用于标贴式三相PMSM,后者主要用于内嵌式PMSM。但这里说明一下,对于表贴式PMSM,Id=0控制和最大转矩电流比控制
2023-03-13 10:46:362 学了一年多的PMSM了,用最快的方法在simulink里搭建一个基础的矢量控制模型,不熟悉的话可以参考下,有空更新每个步骤细节和其他实现方法,创作不宜,记得点赞收藏。
2023-03-14 09:33:050 三相PMSM的坐标变换 1. Clark变换与仿真建模 1. Clark变换 2. 仿真建模 2. Park变换与仿真建模 1. Park变换 2. 仿真建模 仿真文件 (提取码:1234)
2023-03-14 09:33:061 永磁同步电机负载状态估计(龙伯格观测器离散连续各种卡尔曼滤波器)矢量控制坐标变换,英文论文复现含中文报告可作为结课作业。 simulink仿真如下: 永磁同步电机与矢量控制部分: 龙伯格观测器
2023-03-14 09:33:086 为了简化自然坐标系下三相 PMSM 的数学模型,PMSM控制算法中采用的坐标变换通常包括静止坐标变换( Clark 变换)
和同步旋转坐标变换( Park变换) 。各坐标系如下图所示,其中,ABC
2023-03-15 10:47:371 PMSM本体。 2.SVPWM(矢量脉宽调制技术)的搭建 上图为封装好的SVPWM模型。这里面有两个输入参数,分别为电压Ud和调制时间Ts。 3.park变换和克拉克clark变换上图为park变换。
2023-03-15 10:37:072
制一点点的进行讲解。我们知道,标准的FOC(矢量控制)是由电流环、转速环和PWM控制算法组成的。而它们得以实现的基础正是坐标变换。
2023-03-15 10:14:432 目录在位置跟踪伺服系统中二相混合式步进电机闭环矢量控制simulink仿真 闭环矢量控制系统simulink图 闭环矢量控制系统系统结构框图 二相混合式步进电机的数学模型 矩角特性 电压方程
2023-03-24 10:30:592 前言:在前面梳理完电机数学模型和坐标变换的知识后,下一步就是对矢量控制系统的建立,矢量控制系统重在于其思想框
架的理解以及异步电机独有多种磁场定向方案之间的区别,这两个问题都是值得独立探究的,按照顺序来。
2023-03-27 11:16:085 矢量控制是一种高级的电机控制方法,它的基本原理是通过对电机的磁场进行控制,来实现对电机的转矩、转速和位置的控制。矢量控制技术将三相电机的电流、电压和频率进行坐标变换,将其转换为直角坐标系下的两个分量x和y的形式,然后可以分别对这两个分量进行控制,从而精确地控制电机的磁场和电流。
2023-03-28 15:44:098298 , Space Vector Pulse Width Modulation)合成参考电压矢量。矢量控制在国际上一般被称为磁场定向控制技术, 即用电机自身磁场矢量的方向作为坐标轴的基准方向和坐标变换的方向来控制电动机电流的大小、方向的控制方法。
FOC 能取得较好的动静态性能,在中小功率场合得到了广泛的应用,
2023-03-29 11:45:290 至于什么时异步电机矢量控制系统,这里就不赘述了。可以参考陈伯时教授的《运动控制系统》,讲的很详细。涉及到许多概念,包括何为坐标变换,以及dq坐标系下异步电机方程,间接矢量控
制之类。这些都是最最
2023-03-29 10:21:492 相信对于很多做永磁同步电机控制或者想要了解永磁同步电机控制的朋友来说Clark变换是必须要理解的一个重要环节,之前查阅了很多的网上分享的文章,但是一直没有比较深刻的理解其过程,今天小编就结合一些牛人
2023-05-06 14:16:290 FOC控制的本质其实就是解耦。借助电角度,把三相侧电流变换到旋转两相侧(也就是clark,park变换),然后在旋转两相侧实现转矩和磁链的单独控制。以上的分析都是依托于MATLAB/simulink
2023-05-29 16:59:473531 
FOC控制的本质其实就是解耦。借助电角度,把三相侧电流变换到旋转两相侧(也就是clark,park变换),然后在旋转两相侧实现转矩和磁链的单独控制。以上的分析都是依托于MATLAB/simulink
2023-05-29 17:00:032766 
导读:异步电机直接矢量控制需要通过磁链观测器来获取同步角,用于控制过程中的坐标变换。
2023-11-09 11:24:102680 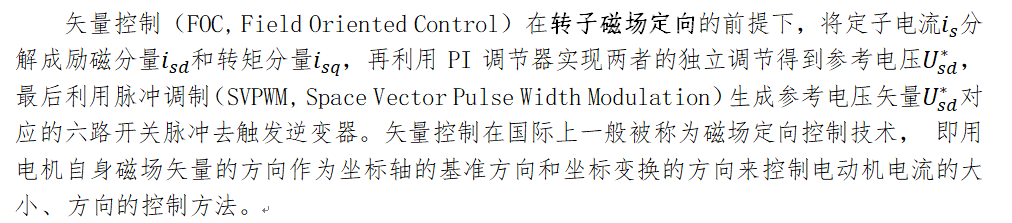
在电机的运行中,是由电机定子和转子磁场同步旋转,建立的一个具有同步旋转速度的旋转坐标系,这个旋转坐标系就是常说的D-Q旋转坐标系。在该旋转坐标系上,所有电信号都可以描述为常数。为了方便电机矢量控制
2025-01-15 17:23:301417 
电力电子中的坐标变换详解 clark变换&park变换
2025-02-17 15:28:181 一、Clarke 变换推导(三相静止坐标与两相静止坐标换算)通过三相静止坐标系(ABC)和两相静止坐标系(αβ)的换算,可以实现电机三相电源矢量在空 间上的解耦,利用两相坐标系,可以解决电机矢量控制
2025-04-03 11:35:386
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论