本文介绍如何使用降阶隆伯格观测器(ROLO)估算永磁同步电机(PMSM)的转子磁链位置。
2021-04-02 11:17:41 3263
3263 
最大的补偿值+1.1.07,补偿才最接近标准表的值但是功率因数还是有误差;但是通过以下的实测波形只有IC J8-2是电流超前,如果按照此波形进行补偿的话更是超出了范围。不知道是哪里不对?功率因数不准
2018-09-18 11:18:46
1、这个传感器输出来的数据是经过误差补偿的吗?还是需要使用者自己去寄存器中读取数据进行补偿?
2、传感器的标定中的安装误差和与比例有关项的系数是不是需要使用者自己去测?
2024-01-02 08:01:36
使用FOC算法有位置传感器控制永磁同步电机时,程序中有一个参数是补偿角度。我想问的是这个角度如果设置的和实际补偿角度不一样会有什么后果?会影响电机转动吗?
2018-09-21 14:14:40
Rs估算是通过向d轴注入直流电流来实现的,这个时候如果注入的电流在定子形成的磁场和转子磁场不在同一方向上,转子应该就会转动吧,为什么技术指南上说Rs离线校准要求电机静止,请问如何才能保证电机静止呢?
2018-09-25 10:53:13
请问大家, 最近在用28069F测无位置控制算法的性能,使用的是一台小功率永磁同步电机,发现给定转速与估算器输出转速基本一致,但与实际转速相差较大,不知道是哪里的参数有问题导致的。自己感觉可能
2018-12-19 11:24:42
的工作原理AMR传感器的选择为了确保电机转动的高精准度,在选择角度传感器时有以下建议 :能感应360° 旋转角,可以准确测量绝对角度位置(Absolute Angular Position);角度误差率较低
2019-08-10 08:00:00
关于永磁同步电机的一个问题,假如电机为4极对,那么编码器给出的UVW相信号一个360电角度对应的机械角度为90度。每一种UVW相信号对应60电角度即15度机械角度。想不明白的就是电机可能停在15度角里的任意位置,那怎么由UVW相信号来计算出启动时的电角度是多少呢?是我的思路不对还是怎样!
2020-03-30 16:44:23
各位前辈,大家好!目前是使用MAXON电机进行特定角度曲线的跟踪控制,具体如下:1目标角度曲线原周期是1秒,曲线现状类似于正弦波形,但更复杂些。2 电机驱动器设置在电流控制模式,就是通过调节电流大小
2020-01-25 20:27:15
在一单片机传感器测量系统中,要解决传感器温度误差补偿问题,首先要测出传感器点的温度,该温度信号作为多路采样开关采集信号的一路送入单片机。测温元件通常是安装在传感器内靠近敏感元件的地方,用来测量传感器
2013-05-02 10:35:09
压阻式传感器为什么会产生温度误差?如何补偿?
2021-06-18 08:01:57
压阻式传感器有哪些典型特点?压阻式传感器为什么会产生温度误差?如何补偿?
2021-06-08 08:28:22
在mahnoy互补滤波算法中,是通过把加速度传感器测得的重力加速度和姿态矩阵计算出的重力加速度进行向量叉乘得到误差,再将该误差经过PI计算补偿陀螺仪测量得到的角速度。我的问题是,叉乘求误差中,是通过
2019-05-17 03:38:02
所示。在表1中未补偿前的最大误差角度为0.682 7°,表3中补偿后的最大误差角度为0.261 6°,相对减少的误差角度为0.421 1°。 由表1和表3的数据对比结果可以看出,经过温度补偿后的姿态
2018-11-06 15:51:47
的输出值。偿后的数据如表3所示。在表1中未补偿前的最大误差角度为0.682 7°,表3中补偿后的最大误差角度为0.261 6°,相对减少的误差角度为0.421 1°。 5 结语 由表1和表3
2018-11-06 15:28:58
不下去。解决工程师项目痛点。
直播回放: https://t.elecfans.com/live/2342.html
课件资料:*附件:基于电流误差和PLL估算的无感FOC算法MATLAB代码生成技术直播资料分享.rar
2023-06-14 11:36:04
如何实现伺服电机转动固定角度呢?然后又停下来?
2021-09-24 06:37:51
如何控制步进电机转固定小角度?
2021-10-19 08:47:47
我在我的电源板项目中使用转换器 Viper06。我在设计误差放大器的补偿网络时遇到了一些困难。有人可以告诉我如何做到这一点或分享一些解释如何设计补偿网络的文件。我用在线工具得到了一些值,但我想了解这些值是怎么出来的!
2023-02-08 08:08:22
如何选择伺服电机?有没有相关快捷或者估算电机的方法?
2023-12-12 06:23:09
和节能应用中受到普遍关心的产品和开发课题。无速度传感器磁场定向矢量控制技术的核心是如何准确的获取磁场定向角以及电机的转速信息。 无速度传感器控制方式分为4类: 1、定子电流转矩分量误差补偿法; 2
2016-01-21 15:40:59
用MSP430F149怎么进行PWM的脉冲计数啊,控制步进电机的角度??请教下,谢谢。。。
2015-12-31 14:12:12
菜鸟刚玩电机,不怎么懂/在玩无刷电机的时候,无刷电机为什么在换相会直接转动5度大小的角度?怎么样才能玩转360度的控制呢?
2016-01-12 09:35:28
电机的运动原理是什么?怎样去搭建一种电机模型?电角度和机械角度有什么关系?
2021-07-20 06:58:05
步进电机的步进角度和工作原理是什么?
2021-10-18 08:51:15
* dt + estimator.accZ * dt * dt / 2.0f;是估算加速度偏小造成的,所以补偿加速度应该让估算的加速度值变大一点,而补偿加速度的公式为estimator.accZ
2019-07-26 04:35:55
做了个电流表满量程300准确,但50时误差为20,想对300到50之间加一个补偿,实际300时补偿0,实际50时补偿20。按300到50之间的误差是线性的,具体公式怎么写,用的汇编只能算整数。
2018-05-31 17:31:00
编码器零点电角度偏移量同步电机的控制,转子的位置是必要的反馈。电机的磁极的换向,控制的是电角度。编码器的安装和电角度,存在误差。机械角度的反馈,在多极对数时,需要做一个电角度的转换,进入控制的转子
2021-09-03 06:08:34
有没有测试电机角度的demo硬件呢?要怎么做,用位置传感器吗,哪里有卖?
2018-12-12 11:09:07
角度PID里的积分项,应该就是从上一次平衡后的误差角度累加乘上采样时间得到的。但是微分项说角度的微分是角速度,角速度的积分是角度,所以直接利用陀螺仪的角速度。但是我发现那句话:角速度的积分就是角度,所以能不能在角度积分项中直接用欧拉角的角度值呢?
2019-04-17 06:36:22
请问A/D转换器MAX1324最常见的误差源有哪些?怎么大幅度提高系统整体性能,有哪些误差补偿的方法?
2021-04-08 06:39:26
1、这个传感器输出来的数据是经过误差补偿的吗?还是需要使用者自己去寄存器中读取数据进行补偿?2、传感器的标定中的安装误差和与比例有关项的系数是不是需要使用者自己去测?
2018-11-26 09:26:41
请问一下电机控制5段式PWM如何做死区补偿呢?
2023-04-18 17:25:39
请问怎样去计算步进电机一个脉冲转了多少角度呢?如果和细分有关细,那么细分又是如何来算的呢,多谢!
2023-03-03 16:06:50
1.根据实时扭矩请求,控制电流达到需求扭矩(扭矩控制必须准确,误差在±10%之内才行),用FOC算法(电机仅带霍尔传感)可行么? 2. 最终目的是控制物体平衡性的(转子角度在低速时,估算不准确,转动异常,怎么解决?)
2018-09-19 09:42:22
`,这是我对比的估算角度和实测角度。`
2019-06-09 16:58:40
采用滑膜估算的角度和实际的角度总是有相位差,但是观察由滑膜估算的电流和实际的电流,它们的波形基本重合。为什么?下图为估算的电流和实际的电流波形图。和估算的角度和实际的角度的图形。其中黄色的代表估算的角度,绿色的代表实际的角度。谢谢指导。
2018-12-14 13:51:08
在测量系统中,传感器的非线性特性是测量系统误差的主要来源。要提高测量系统的精度,就必须进行误差补偿。设计了一个用模糊小脑神经网络实现的补偿环节。该补偿环节是一
2009-03-14 18:27:01 11
11 磁补偿式霍尔传感器在变频调速电机中的应用:解说磁补偿式霍尔传感器的工作原理
2009-04-02 10:17:3728 本文介绍了数控机床的螺距误差补偿原理和基于激光干涉仪的螺距误差测量系统,并且讨论了在螺距误差测量中所出现的问题和解决方案,最后介绍了螺距误差补偿的适用范围。
2009-05-05 22:01:0574 本文分析了单片机定时器溢出中断与CPU响应中断的时间误差,并给出了补偿误差的方法和实例。关键词:单片机; 定时器; 中断; 误差
2009-05-31 14:31:2226 研究了一种智能电子罗盘的误差补偿问题。把误差的形成过程假设为从圆到椭圆的变化过程(椭圆假设) ,其逆过程就是误差补偿的过程。研究了基于椭圆假设求解误差系数算法和误差
2009-06-22 11:55:3241 介绍了压力传感器、变送器、智能压力传感器,对压力传感器的零点漂移、压力灵敏度、非线性误差进行补偿。设计了压力变送器、温度变送器、A/D 转换器和单片机电路。较好地补
2009-06-25 11:04:20102 研制了一种具有三种误差补偿方法的智能磁航向系统(智能电子磁罗盘) 。传统的给定基准法具有满意的补偿效果,但试验复杂。对水平情况,椭圆假设法把误差的形成过程假设为从圆到
2009-07-01 09:51:078 含有多传感器的微机电系统在组装传感器时, 一般存在着轴对准问题, 轴的非对准误差能导致很大的系统测量误差。为此提出一种基于光对准的误差补偿方法, 可以在不需要高精度轴
2009-07-11 11:19:5418 基于Web的数控曲面磨床几何误差补偿技术:以误差补偿技术的网络化应用为目的展开研究,选取SMART-CNC 数控曲面磨床为研究对象,运用多体理论,建立了磨床的运动模型,获得了
2009-10-12 18:36:2626 本文由MIMO 无线通信信道容量的表达式,给出一种估算式。通过数值仿真对估算值与精确值进行比较,进行误差分析,得出估算值是较精确的,可用估算表达式可靠地预测MIMO 信道的
2010-02-06 10:37:2720
传感器非线性误差的补偿电路
2009-04-26 15:59:211035 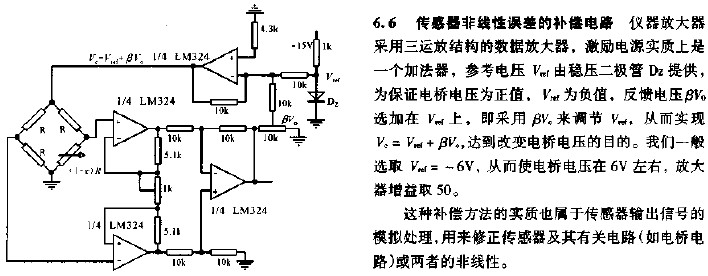
估算单向电机启动电容单向电动机启动电容器,经长时间使用后,容易出现容量减少的故障。若想确知容量大小,可将它与交流电流表串联后,接于市电220V
2009-08-14 15:36:301063 介绍了采用三次样条曲线插值方法对称重仪表的非线性误差进行修正的方法,该修正方法对于线性误差较大的传感器有很好的补偿效果,在某些测量精度较高的场合采用三次样条曲线插
2011-06-08 15:46:5125 指出了超声波在测距应用中的局限性, 并给出解决方案。着重从新的角度补偿超声传感器的误差, 提出了用BP前馈神经网络补偿超声波声速受温度、湿度变化而引起的误差。
2012-04-01 15:18:229 电子发烧友网站提供《圆光栅角度传感器的误差补偿及参数辨识资料下载.pdf》资料免费下载
2017-03-26 22:14:001 本文针对半闭环伺服压装系统的误差特点,设计使用刚性块作为辅助装置进行误差标定,并通过最小二乘法拟合和误差表格插值,实现误差的补偿。经过对随机选取的实际生产数据进行误差补偿并与数显千分表实测值进行对比分析后得,补偿后的误差可以控制在1%左右,极大地提高了零部件压装合格判定的准确度。
2015-12-24 16:05:2512 FANUC-18iMB数控系统螺距误差补偿说明,附参数说明。
2016-02-18 17:22:474 永磁同步电机用线性霍尔位置检测的误差补偿_刘刚
2017-01-07 15:26:082 MEMS加速度计的温度误差建模及补偿_秦丽
2017-01-12 18:09:582 基于ARM的同步交流采样和误差补偿_潘健
2017-03-19 11:47:146 基于PSO_SVM的四旋翼航向角误差补偿研究_王鹏彰
2017-03-19 11:41:233 改进的IMU传感器安装误差正交补偿方法_马亚平
2017-03-19 19:04:236 基于九轴MEMS定位系统误差分析与补偿算法研究_张港
2017-03-19 19:28:034 估算出轮廓误差值,结合双模糊变论域自适应控制算法,应用于两轴数控系统并实时补偿各单轴控制器,实现对复杂加工过程轮廓误差实时估算并补偿。在实验数控机床上加工两种典型轮廓,对比实验表明,所提出的基于轮廓最优圆
2017-11-29 10:30:010 针对凸轮磨削加工过程中存在局部升程误差严重超差的问题,提出了加权支持向量机的凸轮升程误差补偿方法。首先根据圆率的符号判断凸轮升程误差值是否连续,然后建立了不连续点与相邻点之间夹角与加权值的关系。通过
2017-11-30 16:50:170 主要有机床零部件和结构的空间几何误差、热误差、载荷误差、伺服误差和插补误差等。机械误差会严重影响加工质量,因此必须要对各种误差实施测量、评定、补偿和控制,有效的误差补偿模型能够实现上述操作。本文利用PLC机械一体化
2018-01-26 16:35:072 分析了圆筒型永磁直线同步电机采用线性霍尔传感器进行位置检测时存在的误差,并提出了一种离线标定和在线Kalman滤波相结合的误差补偿方法。霍尔传感器信号的误差形式包括存在直流偏置、两路信号幅值不相等
2018-03-07 10:29:470 的优点,由同一电机带动光电编码器和被测旋转变压器,以FPGA +ARM组成的控制模块读出光电编码器和被测旋转变压器的角度,并进行比较分析,测量旋转变压器的非线性误差,建立误差分析表,提出了一种根据系数进行补偿的方式,对旋转变压器的
2018-03-14 10:59:039 变压器和编码器等方式。通过解算电机角度、转速信息,实现闭环矢量控制。但传感器的引入会增加系统成本、降低系统可靠性及增加电机尺寸,并且有些场合受温度、湿度和电机尺寸限制等,位置传感器无法使用。为了解决此问题,需要研究无速度传感
2018-03-20 10:25:3128 为减小电流测量误差,满足永磁同步电机高性能调速要求,对相电流测量误差进行了分析与补偿。首先,介绍了电流测量误差产生原理,分析了测量误差对闭环调速系统性能的影响。然后,提出了一种对d轴电流进行分段积分
2018-03-20 18:24:001 今天为大家介绍一项国家发明授权专利——一种电能表自热影响误差补偿方法。该专利由宁波迦南智能电气股份有限公司申请,并于2018年8月21日获得授权公告。
2018-09-14 09:01:001632 位姿精度是研究机器人的关键性能指标。国内外学者一直关注并不断研究发现多种多样的误差补偿方法如硬件补偿法、摄动补偿算法和直接修正算法对机器人的位姿误差进行补偿。陈明哲与张启先采用雅可比矩阵构建
2018-04-20 16:56:531 LE误差放大器及其相关的补偿网络使动物回到控制输入端,补偿网络%。
2018-05-29 09:48:0895 TI 无传感电机控制算法介绍-InstaSpin FAST估算器
2018-08-22 00:06:005257 (SIN)和余弦(COS)波形的差分信号。CT300的差分信号经过处理和补偿,在-40℃ ~ +150℃的温度范围内,所产生的角度误差将等于或低于0.5°。
2018-11-16 15:13:172374 一、为什么需要进行仪器误差的综合计算?仪器设计完成后,需要估算仪器的总精度;仪器技术鉴定时,需要评价其性能需要理论上的精度分析与估算。
2018-12-25 08:00:0018 采用直流力矩电机分度,同步采集系统进行数据采集,对高精度两路关联角度传感器自动标定。为了实现秒级角度的自动标定,采用了闭环控制系统和角度误差补偿,在± 3º范围内,控制精度可达到0 。 2“。利用虚拟仪器技术整合数据采集和控制系统,使得标定高效方便。
2019-11-05 17:22:1515 针对多探头球面近场天线测试系统的通道不一致性提出了校准方法,并对对准角度误差引入的近场测量幅度相位误差进行了仿真分析。分析表明,当对准角度误差 Δφ = 0. 5°时,引入的近场测量幅度误差
2020-01-06 08:00:0019 Cortex™-M0 + MCU中,ADC 增益和失调误差可通过硬件进行补偿,从而降低了补偿这些 ADC 误差的应用开销。
2021-04-01 10:14:4342 误差补偿技术分为硬件补偿和软件补偿。其中,硬件补偿主要是通过机床的机械结构进行调整,减少机械上的误差,如制作校正尺补偿螺距误差、制作凸轮校正传动链误差等。硬件补偿不适用于随机误差且缺乏柔性。软件补偿是指通过计算机对所建立的数学模型进行运算后,发出运动补偿指令,由数控伺服系统完成误差补偿动作。
2023-02-08 11:42:442769 
目录 电机方程 电压方程 磁链方程 定义状态变量和输出变量 非线性观测器方程 电角度的计算--锁相环 锁相环调参电机方程 电压方程 磁链方程 定义状态变量和输出变量 非线性观测器方程在对反电势进行
2023-05-06 14:31:168 数控机床的传动机构一般是滚珠丝杆副,滚珠丝杆副在生产制造和装配过程中都存在一定误差,且长期使用造成的磨损等因素都会使其精度下降,当前有效且广泛应用的方法是利用激光干涉仪对数控机床进行螺距误差补偿
2022-03-21 11:32:361007 
步进电机驱动电压、角度、代码举例
2023-09-18 11:28:261729 伺服位置误差大的原因及解决方法 伺服电机是一种精密控制装置,可以实现高精度、高稳定性的位置控制。然而,伺服电机在使用过程中常常出现定位误差过大的问题。本文将从机械结构、控制系统、环境因素、测量误差
2023-12-25 13:57:521856 电机电角度和机械角度之间的关系是电机控制和运行中的重要概念。了解电机电角度和机械角度之间的关系对于电机的控制和使用至关重要。在这篇文章中,我们将详细介绍电机电角度和机械角度的概念、它们之间的关系
2023-12-27 18:03:50657 应变片产生温度误差的原因及减小或补偿温度误差的方法是什么? 温度误差是指应变片在测量过程中所得到的温度与实际温度之间的差异。应变片产生温度误差的原因有很多,主要包括材料的热膨胀、温度梯度引起的位移
2024-02-04 17:31:04812 为什么发相同的脉冲数但步进电机走的角度会有规律的减少? 步进电机是一种特殊类型的电机,它以固定的角度(步长)移动。当输入相同数量的脉冲时,步进电机的角度变化应该是相同的,但有时候我们会发现角度会有
2024-02-06 14:50:071111
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论